i
APLIKASI SCADA DALAM PROSES PASTEURISASI
PENGISIAN DAN PENGEPAKAN PRODUK SUSU
KEMASAN PADA MINI DCS BERBASIS PLC OMRON
CPM2A
Diajukan Untuk Memenuhi Salah Satu Syarat memperoleh Gelar Sarjana Teknik pada
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh: STENLY KADANG
NIM : 045114079
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
THE APLICATION OF SCADA FOR PASTEURIZATION
ADMISSION AND PACKING DIARY PRODUCT IN MINI
DCS BASED ON PLC OMRON CPM2A
In partial fulfilment of the requirements
for the degree of Sarjana Teknik
Electrical Engineering Study Program
Electrical Engineering Department
Sience and Technologi Faculty Sanata Dharma University
By:
STENLY KADANG
NIM : 045114079
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
APLIKASI SCADA DALAM PROSES
PASTETTRISASI
PENGISIAN DAN PENGSPAKAN
PRODUK SUSU
KEMASAN PADA MINI I}CS BERBASIS PLC OMRON
CPM2A
Pembimbing I
Z-/"
B. Wud Harinio S.T., M.T.
Tanggal : l2Mwet2009
Pembimbing
tr
Tanggal : l2Metret2ffi9
APLIKASI SCADA DALAM PROSES PASTEURISASI
PENGISIAIY DAN PENGEPAKAN PRODUK SUSU
KEMASAN PADA MIhII DCS BERBASIS PLC OMRON
CPM2A
Disusun
oleh :
STTM,Y KADANG
IilM: O45ll{/0'79
Telah dipertahankan di depan panitia penguji Pada tanggal 18 Maret 2009
dan dinyaatakan memenuhi syarat
Susunan
Panitia Penguji :
Nama Lengkap
Ketua
Sekretaris
Anggota
Anggota
Ir. Th. PrimaAri Setiyani,
M.T.
B. Wuri Harini, S.T., M.T.
A. Bayu
Primawan,
S.T.,
M.Eng.
Ir. Tjendro
Sains dan Teknologi
Saya
menyatakan
dengan
sesungguhnya
bahwa
tugas akhir ini tidak memuat
karya
atau bagian karya orang lain, kecuali yang telah disebutkan
dalam kutipan dan daftar
pustaka
sebagaimana
layaknya
karya ilmiah.
Yoryakartaa3Maret
2009
vi
Namun aku hidup, tetapi bukan lagi aku sendiri yang hidup,
melainkan Kristus yang hidup di dalam aku.
Dan hidupku yang kuhidupi sekarang di dalam daging, adalah
hidup oleh iman dalam Anak Allah yang telah mengasihi aku dan
menyerahkan diri-Nya untuk aku.
(Galatia 2:20)
I will follow YOU till the end
coz YOU are the reason
that I live
Te runtuk
Prib a d i ya ng sla lu se tia m e ng a sihiku, m e ne rim a ku, m e nja g a i hid up ku MY LO RD JESUS, a ll fo r YO U
Ba p a k Ib u, ta nd a ka sihku Ka ka k A d e kku, ta nd a c inta ku
O ra ng - o ra ng ya ng kusa ya ng i d a n m e nya ya ng iku Da n
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda
tangan dibawah ini saya malrasiswa
Universitas Sanata
Dharma :
Nama
: Stenly Kadang
Nomor Malrasiswa : 045114079
Demi pengembangan
ilmu pengetahuan,
saya memberikan
kepada Perpustakaan
Universitas Sanata
Dharma Karya Ilmiah saya yang berjudul :
APLIKASI SCADA DALAM PROSES PASTEURISASI PENGISIAN DAN
PENGEPAKAI\ PRODUK SUSU KEMASAI\T PADA MINI DCS BERBASIS
PLC OMRON CPM2A
beserta perangkat, yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan
Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk
media lain, mengelolanya
dalam bentuk pangkalan dat4 mendistribusikan
secara
terbatas dan
mempublikasikannya
di Internet atau media lain untuk kepentingan akademis tanpa perlu
meminta ijin daxi saya maupun memberikan royalty kepada saya selama tetap mencantumkan
nama saya sebagai
penulis.
Demikianpernyataan
ini saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : L3Marct 2009
Yang menyatakan
ffi4
(Stenly Kadang)
vii
teknologi pengendalian terdistribusi atau Distributed Control System (DCS), yang salah satu komponen di dalamnya adalah Programmable Logic Controller (PLC). Perkembangan teknologi PLC juga diikuti dengan semakin berkembangnya sistem pengontrol PLC, misalnya SCADA (Supervisory Control And Data Acquisition). Sistem pengontrolan menggunakan SCADA masih kurang dikenal masyarakat Indonesia karena mahalnya biaya investasi untuk sistem ini.
Aplikasi SCADA pada sistem pasteurisasi, pengisian dan pengepakan produk susu kemasan merupakan alternatif sistem pengontrol PLC sederhana dengan biaya yang terjangkau bagi masyarakat Indonesia. Program SCADA dibuat dengan menggunakan
software visual basic 6.0. SCADA pada komputer akan mengontrol, mengawasi dan
mengumpulkan data dari 3 buah PLC OMRON CPM2A. Setiap PLC akan mengontrol sebuah plant. Untuk menghubungkan komputer dan 3 buah PLC OMRON CPM2A digunakan konverter RS232-RS485 dan RS485-RS232.
Hasil pengamatan dan pengujian sistem dengan menggunakan program simulasi pada PLC menunjukkan SCADA dapat berfungsi dengan baik dalam mengontrol, membaca dan menyimpan data serta menampilkan kondisi plant. Secara keseluruhan tidak ada kesalahan dalam pengiriman dan penerimaan data antara komputer dengan PLC.
viii
The convergence of control, information, and communication technology is Distributed Control System (DCS). One component of DCS is Programmable Logic Controller (PLC). The development of PLC technology is also followed by development of PLC control system for example SCADA (Supervisory Control And Data Acquisition). The control system with SCADA unfamiliar in Indonesian people, because the cost for this system is too high.
The aplication of SCADA for pasteurization, admission and packing diary product is an alternative of simple PLC control system which reachable cost for Indonesian people. SCADA program was built with software visual basic 6.0. In Computer, it will control, monitor, and collect data from 3 PLCs OMRON CPM2A. Each PLC will control a plant. RS232-RS485 and RS485-RS232 converter are used to connect computer and 3 PLCs OMRON CPM2A.
The result of system observation and testwith simulation program in PLC shows that SCADA can work well to contols, read and save data. It also can show the plant condition well. Overall there are no error in send or receive data between computer and PLC.
x
Puji syukur kepada Bapa di surga yang telah memberi berkat, hikmat dan kasih karunia-Nya, sehingga penulis dapat menyelesaikan skripsi yang berjudul APLIKASI SCADA DALAM PROSES PASTEURISASI PENGISIAN DAN PENGEPAKAN PRODUK SUSU KEMASAN PADA MINI DCS BERBASIS PLC OMRON CPM2A. Tugas Akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik.
Pada proses penyusunan skripsi ini tidak lepas dari bantuan berbagai pihak. Oleh karena itu, pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Ibu B. Wuri Harini, S.T., M.T. sebagai dosen pembimbing I yang telah bersedia memberikan ide, saran, semangat, kesabaran, bimbingan dan waktu bagi penulis dalam menyelesaikan tugas akhir.
2. Bapak Ir. Tjendro sebagai pembimbing II yang telah bersedia memberikan ide, saran, dan bimbingan untuk penulis dalam menyelesaikan tugas akhir. 3. Bapak dan Ibu tercinta, kakakku Yudit dan adikku Stephen yang terus
menerus mendoakan dan memberi dorongan serta semangat untuk menyelesaikan skripsi ini. Terima kasih untuk segala cinta dan kasih sayang yang telah diberikan.
xi
semangat yang diberikan dan hiburan saat jenuh dan stress di Lab TA. 6. Laboran TE Mas Broto, Mas Soer, Mas Mardie atas semua bantuanya
selama di Lab.
7. Semua saudara-saudaraku di PMK Apostolos terima kasih buat semuanya yang sudah diberikan.
8. Semua pihak yang tidak dapat disebutkan satu persatu di sini, atas perhatian, kebaikan dan bantuannya kepada penulis.
Penulis menyadari masih banyak kekurangan yang ada dalam tulisan ini, untuk itu kritik dan saran sangat kami harapkan demi kebaikan dan kemajuan tulisan ini. Akhirnya, semoga tulisan ini dapat memberi manfaat bagi siapapun yang memerlukannya.
Yogyakarta, 23 Maret 2009
xii
HALAMAN JUDUL (Bahasa Indonesia)... i
HALAMAN JUDUL (Bahasa Inggris)... ii
HALAMAN PERSETUJUAN... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
INTISARI ... vii
ABSTRACT... viii
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH... ix
KATA PENGANTAR ... x
DAFTAR ISI... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL... xxi
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Pembatasan Masalah... 2
1.3 Tujuan Penelitian ... 3
1.4 Manfaat Penelitian ... 3
1.5 Metode Penelitian ... 3
1.6 Sistematika Penulisan ... 4
xiii
2.2.2 Konfigurasi Sistem SCADA ... 10
2.3 PLC (Programmable Logic Controller) ... 11
2.3.1 PLC Omron CPM2A... 12
2.3.2 Struktur Memori PLC Omron CPM2A... 13
2.3.3 Komunikasi Host Link... 15
2.4 Komunikasi Serial... 20
2.4.1 Komunikasi Serial RS 232... 20
2.4.2 Komunikasi Serial RS 485... 23
2.4.3 Perbandingan Komunikasi Serial RS 232 dengan RS 485 ... 24
2.5 Microsoft Visual Basic 6.0... 25
2.5.1 Komponen Integrated Development Environment... 25
2.5.2 Unit kontrol VB ... 28
2.5.3 Pengaksesan port serial menggunakan MSComm ... 29
2.6 IC MAX 232 ... 29
2.7 IC MAX 491 ... 30
BAB III PERANCANGAN 3.1 Desain Sistem... 31
3.2 Perancangan Teknik Komunikasi antara PC dengan PLC... 35
3.2.1 Node Number PLC... 35
3.2.2 Mode Operasi PLC ... 35
3.2.3 Alamat Memori Data Monitor SCADA... 36
3.2.4 Alamat Memori Data Kontrol SCADA ... 39
xiv
3.3 Perancangan Perangkat Lunak ... 42
3.3.1 Kerangka Utama ... 42
3.3.2 Form LOGIN ... 43
3.3.3 Form MENU UTAMA ... 44
3.3.4 Subroutine Pengambilan data, kontrol dan bahaya... 46
3.3.5 Subroutine Logout... 50
3.3.6 Form Menu TENTANG ... 51
3.4 Perancangan Perangkat Keras... 52
3.4.1 Konverter RS232-RS485 ... 52
3.4.2 Konverter RS485-RS232 ... 54
3.4.3 Konfigurasi koneksi PC dengan Konverter RS232-RS485 ... 55
3.4.4 Konfigurasi koneksi PLC dengan KonverterRS485-RS232... 56
BAB IV HASIL DAN PEMBAHASAN 4.1 Hasil Pengujian Program SCADA... 57
4.1.1 Pengamatan form LOGIN ... 57
4.1.2 Pengamatan form UTAMA... 58
4.1.3 Pengamatan form TENTANG... 78
4.1.4 Pengamatan isi memori PLC ... 79
4.2 Konverter RS232-RS485 dan onverter RS485-RS232 ... 83
4.2.1 Implementasi alat ... 83
4.2.2 Pengujian level tegangan RS232-RS485 ... 84
xv
xvi
Gambar 2.1 Sistem kendali terdistribusi... 5
Gambar 2.1 Diagram blok jaringan bus I/O... 7
Gambar 2.3 Aplikasi sistem SCADA pada proses produksi... 8
Gambar 2.4 Hierarki dari display grafis suatu MMI... 9
Gambar 2.5 Konfigurasi SCADA ... 11
Gambar 2.6 PLC Omron CPM2A... 12
Gambar 2.7 One-to-one communication... 16
Gambar 2.8 One-to-N communication... 16
Gambar 2.9 Blok diagram prosedur host link communication PLC CPM2A... 17
Gambar 2.10 Format command frame... 18
Gambar 2.11 Format response frame... 18
Gambar 2.12 FCS calculation range... 20
Gambar 2.13 Contoh perhitungan FCS... 20
Gambar 2.14 Level tegangan RS232 pengiriman huruf ‘A’ tanpa bit paritas ... 21
Gambar 2.15 Konektor DB-9... 21
Gambar 2.16 Sinyal dari pemancar (driver) dan penerima (receiver )... 23
Gambar 2.17 Tampilan pemilihan model aplikasi ... 25
Gambar 2.18 MenuBar... 25
Gambar 2.19 Toolbar... 26
Gambar 2.20 ToolBox... 26
Gambar 2.21 Form Designer... 26
xvii
Gambar 2.25 IC MAX 232 tampak atas ... 29
Gambar 2.26 Rangkaian IC MAX 232 ... 30
Gambar 2.27 Konfigurasi pin dan operating circuit MAX 491 ... 30
Gambar 3.1 Blok Diagram Sistem ... 32
Gambar 3.2 Plant 2 ... 33
Gambar 3.3 Plant 3 ... 34
Gambar 3.4 Command frame untuk mengubah mode operasi PLC... 36
Gambar 3.5 Command frame untuk membaca isi memori DM... 41
Gambar 3.6 Command frame untuk menulis memori HR ... 41
Gambar 3.7Diagram alir program SCADA secara umum ... 43
Gambar 3.8Diagram alir proses login... 43
Gambar 3.9Tampilan FormLOGIN... 44
Gambar 3.10Tampilan Form Utama... 45
Gambar 3.11Pengambilan data dan kontrol dan bahaya... 47
Gambar 3.12Diagram alir pengambilan data PLC I,II dan III... 48
Gambar 3.13Diagram alir pengiriman command frame pada PLC ... 48
Gambar 3.14Diagram alir pembacaan respon frame pada PLC ... 49
Gambar 3.15Diagram alir kontrol PLC I, II dan III... 49
Gambar 3.16Diagram alir Bahaya PLC I, II dan III ... 50
Gambar 3.17Diagram alir proses logout... 51
Gambar 3.18Tampilan Form TENTANG... 51
Gambar 3.19Diagram alir menu help... 52
xviii
Gambar 3.23 Perancangan rangkaian konverter RS485-RS232 ... 54
Gambar 3.24Konfigurasi koneksi antara PC dengan konverter RS232-RS485 ... 55
Gambar 3.25Konfigurasi koneksi antara PLC dengan konverter RS485-RS232 ... 56
Gambar 4.1 Tampilan form LOGIN ... 58
Gambar 4.2 Tampilan form UTAMA ... 59
Gambar 4.3 Pesan kontrol 1... 65
Gambar 4.4 Pesan kontrol 2... 65
Gambar 4.5 Pesan kontrol 3... 65
Gambar 4.6 Tampilan tombol kontrol awal... 66
Gambar 4.7 Pesan informasi kontrol awal... 66
Gambar 4.8 Tampilan tombol kontrol koneksi berhasil ... 67
Gambar 4.9 Pesan informasi selesai koneksi PC dengan PLC ... 67
Gambar 4.10 Tombol OFFCLR1 aktif... 67
Gambar 4.11 Pesan-pesan informasi untuk menyalakan tombol OFFCLR... 68
Gambar 4.12 Kondisi tombol kontrol utama dan pesan informasi ”PLANT2 belum dinyalakan”... 68
Gambar 4.13 Kondisi tombol kontrol utama dan pesan informasi ”Matikan PLANT2 ”... 69
Gambar 4.14 Kondisi tombol kontrol utama dan pesan informasi ” Matikan PLANT2 dan PLANT3” ... 69
xix
belum dinyalakan” ... 70
Gambar 4.17 Kondisi tombol kontrol utama dan pesan informasi ” Tidak dapat keluar dari program. Tombol ONCLR1 dan ONCLR3 belum dinyalakan” ... 70
Gambar 4.18 Kondisi tombol kontrol utama dan pesan informasi ” Tidak dapat keluar dari program. Tombol ONCLR1 dan ONCLR2 belum dinyalakan” ... 71
Gambar 4.19 Kondisi tombol kontrol utama dan pesan informasi ” Tidak dapat keluar dari program. Tombol ONCLR1 belum dinyalakan” ... 71
Gambar 4.20 Kondisi tombol kontrol utama dan pesan informasi ” Tidak dapat keluar dari program. Tombol ONCLR2 belum dinyalakan” ... 71
Gambar 4.21 Kondisi tombol kontrol utama dan pesan informasi ” Tidak dapat keluar dari program. Tombol ONCLR3 belum dinyalakan” ... 71
Gambar 4.22 Tampilan Data-SCADA-PLANT1.txt ... 72
Gambar 4.23 Tampilan Data-SCADA-PLANT2.txt ... 72
Gambar 4.24 Tampilan Data-SCADA-PLANT3.txt ... 73
Gambar 4.25 Tampilan Hasil Produksi.txt ... 73
Gambar 4.26 Instruksi mode operasi SCADA... 74
Gambar 4.27 Instruksi tulis memori HR... 74
xx
Gambar 4.31 Tombol PLANT OFF dan instruksinya ... 77
Gambar 4.32 Tombol ONCLR dan instruksinya ... 77
Gambar 4.33 Tombol OFFCLR dan instruksinya... 78
Gambar 4.34 Tampilan menu bantuan... 78
Gambar 4.35 Tampilan form TENTANG... 79
Gambar 4.36 Isi memori DM PLC 1 dan tampilan plant 1 ... 79
Gambar 4.37 Isi memori DM PLC 2 dan tampilan plant 2 ... 80
Gambar 4.38 Isi memori DM PLC 3 dan tampilan plant 3 ... 82
Gambar 4.39 Konverter RS232-RS485 ... 83
Gambar 4.40 Konverter RS485-RS232 ... 84
Gambar 4.41 Sinyal level RS 232 konverter RS232-RS485 ... 84
Gambar 4.42 Sinyal level RS 485 konverter RS232-RS485 ... 85
Gambar 4.43 Sinyal level RS 232 konverter RS485-RS232 ... 85
xxi
Tabel 2.1 Perbandingan sistem terpusat dan sistem terdistribusi ... 5
Tabel 2.2 Pembagian IR area PLC Omron CPM2A ... 13
Tabel 2.3 Pembagian TR, HR, AR, LR, TC, SR area PLC Omron CPM2A ... 14
Tabel 2.4 Pembagian DM area PLC Omron CPM2A... 15
Tabel 2.5 Contoh Header code PLC CPM2A ... 18
Tabel 2.6 Contoh End code PLC CPM2A ... 19
Tabel 2.7 Konfigurasi kaki-kaki DB-9 ... 22
Tabel 2.8 Perbandingan RS 232 dan RS 485... 24
Tabel 2.9 Unit kontrol Visual Basic ... 28
Tabel 3.1 Node number PLC ... 35
Tabel 3.2 Instruksi mode operasi pada PLC ... 36
Tabel 3.3 Data yang dibaca dan alamat memori PLC I ... 36
Tabel 3.4 Data yang dibaca dan alamat memori PLC 2 ... 37
Tabel 3.5 Data yang dibaca dan alamat memori PLC 3 ... 38
Tabel 3.6 Pengaruh HR0001 dan limit switch 1 pada konveyor... 39
Tabel 3.7 Alamat Memori Data Kontrol SCADA ... 39
Tabel 3.8 Alamat Memori Hapus Data SCADA ... 40
Tabel 3.9 Instruksi baca memori DM yang dikirimkan dari SCADA ... 41
Tabel 3.10 Instruksi tulis memori HR yang dikirimkan dari SCADA ... 42
Tabel 4.1 Simulasi kondisi plant 1 ... 60
Tabel 4.2 Pengujian tampilan kondisi plant 1 ... 61
xxii
1
PENDAHULUAN
1.1.
Latar Belakang
Seiring dengan era globalisasi di mana perpindahan manusia semakin luas dan cepat, kebutuhan akan sistem untuk pengontrolan jarak jauh pun semakin meningkat [1]. Teknologi-teknologi baru untuk pengontrolan jarak jauh pun makin bermunculan. Konvergensi teknologi kendali, informasi dan komunikasi telah menghasilkan teknologi pengendalian terdistribusi atau Distributed Control System (DCS), yang salah satu komponen di dalamnya adalah Programmable Logic Controller (PLC).
Sistem Kendali Terdistribusi (Distributed Control Systems) merupakan salah satu metode pengendalian yang menggunakan beberapa unit pemroses untuk mengendalikan suatu plant dengan tujuan agar beban pengendalian dapat terbagi. Beban komputasi yang harus dilakukan terhadap plant pengendalian tersebut dirancang agar tidak bertumpu pada satu unit pemroses saja, melainkan didistribusikan pada beberapa unit. Beberapa unit pemroses ini harus dapat saling bekerja sama sehingga dapat membangun suatu sistem yang terintegrasi.
Programmmable Logic Controller (PLC) adalah salah satu teknologi digital yang cukup banyak digunakan pada dunia industri saat ini [2]. Programmable Logic Controller
menjalankan mesin dan menampilkannya pada komputer. Perkembangan teknologi PLC juga diikuti dengan semakin berkembangnya sistem pengontrol PLC, misalnya SCADA (Supervisory Control And Data Acquisition). Sistem ini sangat dibutuhkan terutama sebagai pengontrol suatu sistem yang membutuhkan kecermatan dalam mengatasi suatu kondisi yang dapat terjadi sewaktu-waktu dan sulit ditangani oleh manusia [3].
Sistem pengontrolan menggunakan SCADA berbasis PLC masih kurang dikenal masyarakat Indonesia. Kebanyakan pengembangnya masih melibatkan pihak asing dengan implementasi sistem terbatas pada perusahaan-perusahaan besar, karena mahalnya biaya investasi untuk sistem ini. Berdasarkan gambaran di atas, akan sangat menarik untuk melakukan penelitian mengenai sistem pengontrol PLC menggunakan sebuah komputer.
PLC yang akan digunakan dalam perancangan sistem SCADA adalah PLC OMRON CPM2A. PLC ini mempunyai kelemahan yaitu hanya memiliki komunikasi serial RS232 (point to point). Oleh karena itu agar PLC ini dapat digunakan pada sebuah jaringan PLC maka perlu dirancang sebuah konverter untuk mengubah komunikasi serialnya dari point to point menjadi multidrop point.
1.2.
Pembatasan Masalah
Berdasarkan latar belakang masalah yang telah diuraikan di atas, pokok masalah yang diidentifikasi dalam penelitian ini adalah :
1. Perancangan komunikasi antara PC dengan 3 buah PLC OMRON CPM2A menggunakan komunikasi serial RS 232 dan RS 485 pada jarak 4 meter. 2. Perancangan konverter RS232-RS485 dan konverter RS485-RS232
3. Perancangan SCADA untuk sistem pasteurisasi, pengisian dan pengepakan kemasan produk minuman menggunakan program Visual Basic 6.0.
1.3.
Tujuan Penelitian
Tujuan yang ingin dicapai dalam penelitan ini adalah membuat aplikasi SCADA untuk sistem pasteurisasi pengisian dan pengepakan produk susu kemasan pada mini DCS termasuk pembuatan konverter RS232-RS485 dan konverter RS485-RS232.
1.4.
Manfaat Penelitian
Manfaat dalam melakukan penelitian ini adalah:
1. Sebagai alternatif program SCADA untuk dunia industri dengan biaya yang lebih murah.
2. Mempermudah para pengguna PLC untuk mengontrol beberapa PLC Omron CPM2A lewat sebuah PC.
3. Membantu mahasiswa dan dosen untuk memahami dan merancang program SCADA pada PLC Omron CPM2A.
1.5.
Metode Penelitian
Metode yang digunakan dalam penelitian ini adalah :
1. Mengumpulkan sejumlah referensi atau literatur dari perpustakaan, internet, dan sebagainya.
3. Pengujian sistem yaitu dengan menghubungkan PLC dan komputer kemudian dilakukan proses pengontrolan, pengambilan data dan pengawasan kondisi setiap plant. Pengujian konverter RS232-RS485 dilakukan dengan pengukuran level tegangan sinyal yang ada.
1.6.
Sistematika Penulisan
1. BAB 1 PENDAHULUAN
Pendahuluan berisi latar belakang masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode penulisan dan sistematika penulisan.
2. BAB II DASAR TEORI
Bab ini berisi teori yang menunjang dalam pembuatan tugas akhir. 3. BAB III ALUR PERANCANGAN
Bab ini berisi penjelasan alur perancangan program SCADA, konverter RS232-RS485 dan konverter RS232-RS485-RS232.
4. BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi hasil dan pembahasan program SCADA dan konverter RS232-RS485
5. BAB V KESIMPULAN DAN SARAN
5
DASAR TEORI
2.1
DCS
(
Distributed Control Systems
)
Distibuted control system atau sistem kendali terdistribusi merupakan salah satu
metode pengendalian yang menggunakan beberapa unit pemroses untuk mengendalikan
suatu plant dengan tujuan agar beban pengendalian dapat terbagi [4]. Beban komputasi
yang harus dilakukan terhadap plant pengendalian tersebut dirancang agar tidak tertumpu
pada suatu unit pemroses, melainkan didistribusikan pada beberapa unit. Beberapa unit
pemroses harus dapat saling bekerja sama sehingga dapat membangun suatu sistem yang
terintegarasi. Gambar 2.1 menunjukkan gambaran sistem kendali terdistribusi.
Secara garis besar, perbedaan antara sistem kendali terpusat (central) dengan
sistem kendali terdistribusi (distributed control system) ditunjukkan pada tabel 2.1
berikut.
Tabel 2.1 Perbandingan sistem terpusat dan sistem terdistribusi [5]
Sistem terpusat (central) Sistem terdistribusi (distributed)
Banyak kabel Data terkirim melalui jaringan khusus
terprogram terkonfigurasi
Mudah rusak Resiko rendah
Dengan adanya suatu sistem kendali yang terdistribusi maka semua proses yang
dikendalikan dengan menggunakan sistem akan terdistribusi ke stasiun-stasiun kontrol
(control station). Masing-masing proses akan dikendalikan oleh masing-masing control
station sehingga gangguan-gangguan yang mungkin timbul akan mudah terlacak dan
gangguan yang timbul pada salah satu proses tidak akan berpengaruh bagi proses lainnya.
Pada sistem kendali terpusat, gangguan pada salah satu proses akan membawa
akibat buruk bagi proses lainnya.
Tujuan akhir sistem kendali terdistribusi adalah untuk meningkatkan kinerja
sistem kendali plant. Kinerja-kinerja yang dipengaruhi dengan adanya sistem kendali
terdistribusi adalah :
1. Produksi
a) Mengoptimalkan jadwal produksi
b) Mengoptimalkan penempatan peralatan
2. Efisiensi
a) Penghematan energi dan material
3. Keselamatan kerja dan penghematan biaya
b) Peningkatan unjuk kerja suatu sistem peralatan
Keuntungan dan kelebihan yang dimiliki DCS:
1. DCS dapat dipasang untuk aplikasi dalam konfigurasi yang sangat sederhana,
kemudian dapat ditingkatkan dan diperluas sesuai kebutuhan selanjutnya.
2. Sistem dapat melakukan multifungsi paralel karena sistem tersusun dari
multiprosesor.
3. Pengkabelan pengendali lebih hemat atau sedikit dibanding dengan konfigurasi
kendali komputer terpusat.
4. Model jaringan memberikan informasi proses seluruh bagian perusahaan
sehingga, menajemen pabrik dan proses berjalan lebih efisien.
Gambar 2.2 Diagram blok jaringan bus I/O [2]
Jaringan Bus I/O (I/O bus networks) merupakan hal yang paling utama dalam
sistem kontrol terdistribusi. Gambar 2.2 menunjukkan gambaran diagram blok jaringan
I/O seperti halnya sebuah sistem komputer pengawas berkomunikasi dengan PLC dalam
local area network (LAN). Arsitektur jaringan bus I/O mengikuti konfigurasi pohon, di
mana setiap perangkat masukan misalnya sensor dihubungkan secara langsung pada PLC
atau bus LAN.
Di dalam jaringan bus I/O, PLC berhubungan langsung dengan perangkat
masukan tanpa menggunakan modul I/O, sehingga PLC berkomunikasi dengan setiap
perangkat I/O berdasarkan protokol bus.
2.2
SCADA (
Supervisory Control and Data Aqcuisition
)
2.2.1 Komponen Sistem SCADA [6]
SCADA (Supervisory Control and Data Aqcuisition) merupakan sebuah sistem
pengendalian, pengawasan, pengambilan dan perekaman data dari kontrol lokal pada
jarak yang jauh. SCADA merupakan bidang yang secara kontinyu selalu dikembangkan
di seluruh bagian dunia pada berbagai tipe industri. Gambar 2.2 menunjukkan aplikasi
sistem SCADA pada proses produksi.
Sebuah sistem SCADA terdiri dari tiga bagian utama yaitu:
a) MS (Master Station)
b) RTU (Remote Terminal Unit)
c) Media komunikasi antara MS dan RTU
a. MS (Master Station) [7]
MS (Master Station) merupakan pusat pengawasan dan pengontrolan atau inti
pada suatu sistem SCADA. MS memiliki fungsi utama sebagai berikut:
1) MS memerintahkan operasi kepada RTU
2) Mengolah secara real time setiap informasi yang diberikan RTU
3) Memberikan tanggapan terhadap interupsi-interupsi yang datang dari RTU
Perkembangan teknologi yang sangat pesat mengakibatkan pengawasan MS dapat
dilakukan menggunakan komputer melalui sebuah software. Software utama yang
digunakan dalam sistem SCADA disebut MMI (Man Machine Interface).
Untuk mewujudkan MMI yang baik maka diperlukan batasan atau standar dalam
pembuatanya. Gambar 2.4 menunjukkan hierarki dari display grafis suatu MMI.
b. RTU (Remote Terminal Unit) [6]
RTU (Remote Terminal Unit) merupakan unit pengawas langsung serta unit
pelaksana operasi dari MS. Dengan adanya RTU memungkinkan MS mengumpulkan data
dan melaksanakan kontrol. Dua fungsi utama dari RTU antara lain:
1) Fungsi lokal, yaitu fungsi pengontrol piranti-piranti perangkat keras yang
terhubung dengan RTU.
2) Fungsi komunikasi, yaitu fungsi pengontrol piranti-piranti perangkat keras yang
berkaitan dengan transmisi data ke MS.
3) RTU dalah unit yang pasif saja dalam fungsi telekomunikasi. Walaupun ada
perubahan-perubahan data informasi pada saat proses berlangsung, RTU tidak
dapat mengirimkan perubahan data tersebut tanpa ada perintah dari MS.
c. Media komunikasi antara MS dan RTU
Media komunikasi berfungsi untuk menghubungkan antara MS dan RTU.
Informasi yang dikumpulkan RTU dikirimkan ke MS ataupun sebaliknya MS
mengirimkan perintah ke RTU. Media komunikasi yang dapat digunakan
menghubungkan MS dengan RTU antara lain:
1) Gelombang radio atau microwave
2) Kabel UTP
3) Saluran tegangan tinggi (Power Line Carrier)
4) Serat optik (fiber Optic)
2.2.2 Konfigurasi Sistem SCADA
Berbagai macam konfigurasi dapat diterapkan dalam sistem SCADA, yaitu
konfigurasi satu-satu, star, party-line, dan gabungan. Pemilihan konfigurasi SCADA
tersedia serta faktor biaya. Gambar 2.5 menunjukkan macam-macam konfigurasi pada
sistem SCADA.
Gambar 2.5 Konfigurasi SCADA (a) konfigurasi satu-satu (b) konfigurasi party-line
(c) konfigurasi star (d) konfigurasi gabungan [6]
2.3
PLC
(
Programmable Logic Controller
)
Programmable Logic Controller diperkenalkan pertama kali pada tahun 1969 oleh
Richard E.Morley. PLC adalah suatu perangkat elektronik digital dengan memori yang
dapat diprogram untuk menyimpan instruksi-instruksi yang menjalankan fungsi-fungsi
spesifik. PLC mampu menggantikan rangkaian sederetan relai yang dijumpai pada sistem
kontrol proses konvensional. Rangkaian kontrol tersebut cukup dibuat menggunakan
software [8]. Pemasangan kabel hanya diperlukan untuk menghubungkan peralatan input
Pada umumnya sebuah PLC memiliki 4 komponen dasar yaitu:
1. Unit CPU (Central Procecing Unit) adalah unit yang berisi mikroprosesor yang
menginterpretasikan sinyal-sinyal input dan melaksanakan pengontrolan,
mengambil keputusan dan mengirim sinyal ke antarmuka output.
2. Unit catu daya diperlukan untuk mengkonversikan sumber tegangan AC menjadi
tegangan DC (5 dan 24 volt) yang dibutuhkan CPU dan rangkaian- rangkaian di
dalam modul antarmuka input dan output.
3. Unit memori adalah tempat menyimpan program dan data-data dari modul
antarmuka input dan output.
4. Unit input dan output adalah antarmuka di mana prosesor menerima informasi
input dan mengirimkan informasi kontrol ke perangkat-perangkat eksternal.
2.3.1 PLC Omron CPM2A [9]
PLC Omron CPM2A terbagi dalam beberapa tipe sesuai dengan jumlah terminal
masukan dan keluaranya. Tipe PLC OMRON CPM2A antara lain : CPM2A with 20 I/O,
CPM2A with 30 I/O, CPM2A with 40 I/O dan CPM2A with 60 I/O. Gambar 2.6
menunjukkan PLC OMRON CPM2A dengan jumlah terminal masukan dan keluarannya
30 buah.
2.3.3 Struktur Memori PLC Omron CPM2A [9]
Beberapa bagian dalam PLC Omron CPM2A memiliki fungsi-fungsi khusus.
Masing masing lokasi memori memiliki ukuran 16 bit atau 1 word. Beberapa word
membentuk daerah atau area yang memiliki fungsi-fungsi khusus. Area memori pada
PLC Omron CPM2Aantara lain: IR, TR, HR, AR, LR, TC, SRdan DM.
a. IR (Internal Relay)Area
Bagian memori ini digunakan untuk menyimpan status keluaran dan masukkan
PLC. Beberapa bit berhubungan langsung dengan terminal masukkan dan keluaran PLC.
IR area dibagi menjadi 3 bagian yaitu inputarea, output area dan work area. Input dan
output area berfungsi untuk mengalokasikan terminal I/O eksternal, sedangkan work area
digunakan bebas didalam program. Tabel 2.2 menunjukkan pembagian IR area pada PLC
Omron CPM2A
Tabel 2.2 Pembagian IR area PLC Omron CPM2A [9]
Daerah Memori Word Bit
Input Area IR 00000 to IR 00915 (160 bits)
IR 00000 to IR 00915 (160 bits)
Output Area IR 01000 to IR 01915 (160 bits)
IR 01000 to IR 01915 (160 bits) IR
Area
Work Area
IR 02000 to IR 04915 IR 02000 to IR 22715
(928 bits)
IR 02000 to IR 04915 IR 02000 to IR 22715
(928 bits)
b. AR (Auxiliary Relay) Area
AR area digunakan untuk fungsi spesifik misalnya status (flag) dan control bits.
Status yang dapat disimpan pada AR area antara lain status PLC, kesalahan serta waktu
c. HR (Holding Relay)Area
HR area digunakan untuk menyimpan data dan mempertahankan status ON/OFF
saat catu daya dimatikan. Bit-bit HR dapat digunakan bebas pada program seperti bit-bit
kerja (work bits).
d. TR (Temporary Relay)Area
TR area digunakan untuk menyimpan sementara status ON/OFF pada
pencabangan program.
e. LR (Link Relay)Area
LR area digunakan untuk link 1:1 dengan PC yang lain.
f. TC (Timer/Counter)Area
Bit-bit pada TC area digunakan untuk fungsi timer dan counter.
g. SR (Spesifik Relay) Area
SR area digunakan untuk fungsi spesifik misalnya status (flag) dan control bits.
SR area menyimpan data analog control yaitu pada alamat SR250 dan SR251. Tabel 2.3
menunjukkan pembagian TR, HR, AR, LR, TC, SR area pada PLC Omron CPM2A
Tabel 2.3 Pembagian TR, HR, AR, LR, TC, SR area PLC Omron CPM2A [9]
Daerah Memori Word Bit
SR Area SR 228 to SR 255
(28 words)
SR 22800 to SR 25515 (448 bits)
TR Area --- TR 0 to TR 7
(8 bits)
HR Area HR 00 to HR 19
(20 words)
HR 0000 to HR 1915 (320 bits)
AR Area AR 00 to AR 23
(24 words)
AR 0000 to AR 2315 (384 bits)
LR Area LR 00 to LR 15
(16 words)
LR 0000 to LR1515 (256 bits)
h. DM (Data Memory)Area
DM area merupakan memori yang paling besar kapasitasnya. Tabel 2.4 menunjukkan
pembagian DM area pada PLC Omron CPM2A. DM Area dibagi menjadi 4 bagian yaitu:
1) Read/Write merupakan memori yang hanya dapat diakses dengan unit word saja.
Data yang tersimpan tidak akan hilang walaupun PLC dimatikan.
2) Error log berfungsi untuk menyimpan waktu dan error code yang ditemukan.
Word ini juga dapat digunakan sebagai DM Read/Write jika fungsi pencatat
kesalahan tidak digunakan.
3) Read only merupakan memori yang tidak dapat diisi program.
4) PC setup digunakan untuk menyimpan berbagai parameter yang mengontrol kerja
PLC.
Tabel 2.4 Pembagian DM area PLC Omron CPM2A [9]
Daerah Memori Word Bit
Read/Write DM 0000 to DM 1999
DM 2022 to DM 2047 (2026 words)
---
ErrorLog DM 2000 to DM 2021
(22 words) ---
ReadOnly DM 6144 to DM 6599
(456 words) ---
DM Area
PC setup DM 6600 to DM
66555 (56 words)
---
2.3.3 Komunikasi Host Link [9]
Salah satu tipe komunikasi pada PLC Omron CPM2A adalah host link
communication. Host link merupakan komunikasi antara PC dengan PLC. PC berfungsi
sebagai master yang dapat memberi perintah, melakukan operasi write dan read pada
atas perintah dari PC. Gambar 2.7 dan 2.8 memperlihatkan bentuk komunikasi host link
pada PLC Omron CPM2A. Host link communication dibedakan menjadi 2 macam yaitu:
1. One-to-one communication (komunikasi antara sebuah PC dengan sebuah
PLC)
2. One-to-N communication (komunikasi antara sebuah PC dengan beberapa
PLC). Pada PLC CPM2A sebuah PC dapat mengontrol 32 PLC.
Standar parameter komunikasi host link pada PLC CPM2A yaitu: baud rate 9600bps, 1
start bit, 7 bit data, 2 stop bit, even parity.
Gambar 2.7One-to-one communication [9]
Perintah-perintah yang dapat dikirimkan PC ke PLC terdiri dari satu rangkaian
data yang harus dikirim dengan bentuk paket terstruktur yang disebut frame.
Masing-masing lokasi data atau memori data memiliki isi frame yang berbeda-beda. Panjang
sebuah frame maksimal 131 data karakter. Gambar 2.9 memperlihatkan blok diagram
prosedur host link communication PLC CPM2A
Gambar 2.9 Blok diagram prosedur host link communication PLC CPM2A [9]
Pada saat host komputer mengirimkan data maka formatnya harus dalam bentuk
command frame. Command frame memiliki bagian-bagian sebagai berikut:
1. @ : kode awal yang harus diberikan sebagai tanda komunikasi dengan PLC.
2. Node No : nomor node sebagai identitas PLC.
3. Header Code : penunjuk operasi write atau read dan penanda area memori PLC.
Tabel 2.5 memperlihatkan contoh Header code pada PLC Omron CPM2A.
4. Text : alamat yang dituju dan jumlah word atau data yang akan dikirimkan ke
5. FCS (Frame Check Sequence) : untuk mengecek kesalahan frame data yang akan
dikirimkan.
6. Terminator : kode akhir dari sebuah frame berisi * dan (ASCII 13).
Tabel 2.5 Contoh Header code PLC CPM2A [9] PC Mode
Header Code
RUN MONITOR PROGRAM Name
RR Valid Valid Valid IR/SR Area Read
RL Valid Valid Valid LR Area Read
RH Valid Valid Valid HR Area Read
RD Valid Valid Valid DM Area Read
RJ Valid Valid Valid AR Area Read
WR Not Valid Valid Valid IR/SR Area Write
WL Not Valid Valid Valid LR Area Write
WH Not Valid Valid Valid HR Area Write
WD Not Valid Valid Valid DM Area Write
WJ Not Valid Valid Valid AR Area Write
MS Valid Valid Valid Status Read
SC Valid Valid Valid Status Write
Gambar 2.10 Format command frame [9]
Setelah PC selesai mengirimkan command frame, maka PLC akan memberi respon
dengan mengirimkan response frame. Gambar 2.10 dan 2.11 memperlihatkan contoh
Gambar 2.11 Format response frame [9] Response frame memiliki bagian-bagian sebagai berikut:
1. @ : kode awal yang harus diberikan sebagai tanda komunikasi dengan PLC.
2. Node No : nomor node sebagai identitas PLC.
3. Header Code : kode yang sama pada Command frame.
4. End Code : kode yang menunjukkan pengiriman data berjalan dengan baik atau
tidak.Tabel 2.6 menunjukkan contoh End code pada PLC Omron CPM2A
5. Text : data respon PLC.
6. FCS (Frame Check Sequence) : untuk mengecek kesalahan frame data yang akan
dikirimkan.
7. Terminator : kode akhir dari sebuah frame. berisi * dan (ASCII 13).
Tabel 2.6 Contoh End code PLC CPM2A
End Code Isi Penyebab Koreksi
00 Normal Completion --- ---
02 Not executable in RUN
mode
Perintah yang dikirimkan tidak dapat dieksekusi karena
PLC berada pada mode RUN
Periksa hubungan antara perintah dengan mode PLC
0B Not executable in
MONITOR mode
Perintah yang dikirimkan tidak dapat dieksekusi karena PLC berada pada mode MONITOR
Periksa hubungan antara perintah dengan mode PLC
13 FCS Error FCS salah
Periksa perhitungan FCS atau ulangi
pengiriman
14 Format Error Format perintah salah
Periksa format perintah kemudian
kirim kembali
18 Frame Length Error Melebihi panjang frame
Pisahkan perintah menjadi beberapa
Saat sebuah frame dikirimkan, kode FCS ( Frame Check Sequence) berfungsi
untuk mengecek apakah terjadi error pada saat transmisi. FCS merupakan data 8 bit yang
dikonversikan ke dalam 2 karakter ASCII. Gambar 2.13 memperlihatkan contoh cara
perhitungan FCS. Langkah-langkah perhitungan FCS antara lain:
1. Mengubah setiap karakter dalam bentuk kode ASCII.
2. Melakukan operasi XOR dari awal karakter (@) sampai batas FCS calculation
range. Gambar 2.12 menunjukkan daerah untuk menghitung nilai FCS.
Gambar 2.12 FCS calculation range [9]
Gambar 2.13 Contoh perhitungan FCS [9]
2.4 Komunikasi
Serial
[10]Ada dua macam cara pengiriman (transmisi) secara serial yaitu komunikasi
sinkron dan komunikasi asinkron. Pada komunikasi sinkron sinyal detak dikirim
bersama-sama dengan data serial. Pada transmisi data serial secara asinkron, detak tidak dikirim
2.4.1 Komunikasi serial RS 232
Standar komunikasi serial yang banyak digunakan adalah standar RS232 yang
dikembangkan oleh Electronic Industry Association and the Telecommunications Industry
Association (EIA/TIA) yang pertama kali dipublikasikan pada tahun 1962. Ini terjadi jauh
sebelum IC TTL populer sehingga sinyal ini tidak ada hubungan sama sekali dengan level
tegangan IC TTL. Standar ini hanya menyangkut komunikasi data antara komputer DTE
dengan alat-alat pelengkap komputer DCE. Standar RS232 inilah yang biasa digunakan
pada port serial IBM kompatibel. Bentuk sinyal dengan level tegangan RS232
diperlihatkan pada gambar 2.14.
Standar sinyal serial RS232 memiliki ketentuan level tegangan sebagai berikut:
1. Logika ‘1’ disebut ‘mark’ terletak antara -3 Volt hingga -25 Volt.
2. Logika ‘0’ disebut ‘space’ terletak antara +3 Volt hingga +25 Volt.
Gambar 2.14 Level tegangan RS232 pada pengiriman huruf ‘A’ tanpa bit paritas [10]
Daerah tegangan antara -3 Volt hingga +3 Volt adalah invalid level, yaitu daerah
tegangan yang tidak memiliki level logika pasti sehingga harus dihindari. Demikian juga,
level tegangan lebih negatif dari -25 Volt atau lebih positif dari +25 Volt juga harus
dihindari karena tegangan tersebut dapat merusak line driver pada saluran RS232.
Pada komputer IBM PC kompatibel terdapat konektor serial DB-9 yang dinamai
COM1. Standar RS232 menyangkut komunikasi data antara komputer (Data Terminal
Equipment/DTE) dengan alat-alat pelengkap komputer (Data Circuit-Terminating
Equipment/DCE). Gambar 2.15 merupakan gambar konektor port serial DB-9 pada
bagian belakang CPU.
Tabel 2.7 Konfigurasi kaki-kaki DB-9 [10]
Nomor
Pin Nama Sinyal Direction Keterangan
1 DCD In Data carrier detect/Received Line
Signal Detect
2 RxD In Received Data
3 TxD Out Transmit Data
4 DTR Out Data TerminalReady
5 GND - Ground
6 DSR In Data Set Ready
7 RST Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indikator
Tabel 2.7 menunjukkan konfigurasi kaki-kaki dan nama sinyal konektor serial
DB-9. Keterangan mengenai fungsi saluran RS 232 pada konektor DB-9 adalah sebagai
berikut :
a) Received Line Signal Detect. Dengan saluran ini DCE memberitahukan ke DTE
bahwa pada terminal input ada data masuk.
b) Received Data, digunakan DTE menerima data dari DCE.
c) Transmit Data, digunakan DTE mengirim data ke DCE.
d) Data Terminal Ready, pada saluran ini DTE memberitahukan terminal siap.
f) Ring Indikator. Pada saluran ini DCE memberitahukan ke DTE bahwa sebuah
stasiun menghendaki hubungan dengannya.
g) Clear To Send. Dengan saluran ini DCE memberitahukan bahwa DTE memulai
mengirim data.
h) Request To Send. Dengan saluran ini DCE diminta mengirim data oleh DTE.
i) DCE Ready. Sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah siap.
2.4.2 Komunikasi Serial RS 485 [11]
Sistem pengiriman data secara serial dengan standar komunikasi serial RS-485
dikembangkan sejak tahun 1983 dan mampu mentransmisikan data yang cukup jauh yaitu
1,2 km. Standar komunikasi serial RS-485 dapat diterapkan pada suatu jaringan telepon
tunggal (party line) atau pada jaringan multidrop (jaringan yang menggunakan topologi
bus). Ada sebanyak 32 pasang pemancar (driver) dan penerima (receiver) yang dapat
disatukan pada jaringan multidrop. Pada sisi pemancar (driver), akan menghasilkan
tegangan sebesar 2 sampai 6 Volt yang saling berbeda polaritasnya pada terminal A-B
dengan acuan titik tengah ground. Pada penerima (receiver) mampu menerima data
dengan nilai amplitudo sinyal minimal +200mV sampai –200mV hingga +6 V sampai –6
V (sinyal maksimal) yang masih dapat diterima antara terminal A-B seperti ditunjukkan
pada gambar 2.16.
2.4.3 Perbandingan Komunikasi Serial RS 232 dengan RS 485 [11]
Perbedan utama antara komunikasi serial RS 232 dengan RS 485 terletak pada
level tegangannya serta mode operasinya. Tabel 2.8 menunjukkan perbandingan
komunikasi serial RS 232 dengan RS 485.
Tabel 2.8 Perbandingan RS 232 dan RS 485 [11]
Spesifikasi RS 232 RS 485
Model Operasi Single-ended Differential
Jumlah driver dan receiver pada 1
jalur 1 driver dan 1 receiver 32 drivers dan 32 receivers
Panjang kabel maksimum 50 feet 4000 feet
Rata-rata data maksimum (40 feet
– 4000 feet untuk RS 232/485) 20 Kb/s 10 Mb/s – 100Kb/s
Driveroutput voltage maksimum +/- 25V -7V to +12V
Level sinyal output driver (loaded
min) +/-15V to +/-5V +/-1.5V
Level sinyal output driver
(unloaded max) +/-25V +/-6V
Driver load impedance (ohm) 3k to 7k 54
Arus listrik driver maksimum in
high Z state (power on) N/A +/-100uA
Arus listrik driver maksimum in
high Z state (power off) +/-6mA +/-100uA
Power Slew rate (max) 30 V/uS N/A
Receiver input voltage range +/-15V -7V to +12V
Receiver input sensitivity +/-3V +/-200mV
2.5
Microsoft Visual Basic 6.0
[12]
Microsoft Visual Basic adalah sebuah compiler yang menganut asas event driven
programming. Istilah visual mengacu pada metode pembuatan tampilan atau objeknya
yang biasa dilakukan secara langsung terlihat oleh programmer. Bahasa yang digunakan
adalah bahasa BASIC yang merupakan salah satu bahasa pemrograman yang cukup
populer pada era Sistem Operasi DOS. Untuk memulai pemrograman dengan Visual
Basic, program Microsoft Visual Basic dijalankan. Selanjutnya akan tampil layar
pembukaan dilanjutkan pilihan tipe program yang akan dibuka atau dibuat seperti yang
terlihat pada Gambar 2.17
Gambar 2.17 Tampilan pemilihan model aplikasi [12]
2.5.1 Komponen Integrated Development Environment
1. MenuBar
Menampilkan perintah-perintah yang dapat digunakan saat bekerja pada Visual
Basic seperti yang terlihat pada Gambar 2.18
2. ToolBar
ToolBar digunakan untuk mempercepat akses perintah yang sering dipakai. Secara
default, ToolBar jenis Standard yang akan ditampilkan saat Visual Basic dijalankan.
ToolBar lain dapat ditampilkan dengan menggunakan pilihan ToolBar pada menu View,
seperti yang terlihat pada Gambar 2.19
Gambar 2.19Toolbar [12] 3. ToolBox
ToolBox merupakan sebuah Window yang berisi komponen yang akan digunakan
dalam mendesain sebuah Form. Selain komponen standar, komponen lain yang
dibutuhkan bisa diatur dalam program ToolBox seperti yang ditunjukkan pada Gambar
2.20
Gambar 2.20ToolBox [12] 4. Form Designer
Form Designer digunakan untuk merancang dan mendesain user interface dan di
sini pula kontrol-kontrol komponen dari ToolBox diletakkan, seperti yang terlihat pada
Gambar 2.21
5. Kode Editor
Kode Editor digunakan secara umum, yakni menuliskan listing program dalam
pembuatan suatu aplikasi, seperti yang terlihat pada Gambar 2.22
Gambar 2.22 Kode Editor [12] 6. Project
Project digunakan untuk melihat kontrol yang berada di dalam form secara
hierarki seperti Windows Explorer, seperti yang terlihat pada Gambar 2.23
Gambar 2.23Project [12] 7. Properties
Properties digunakan untuk memanipulasi kontrol yang sudah ada dalam Form.
Kemudian, Properties memiliki dua halaman, yang masing-masing disebut Alphabetic
(nama properti) dan Catagorized (pilihan properti), seperti yang terlihat pada Gambar
2.24
2.5.2 Unit kontrol VB
Unit kontrol adalah alat bantu yang dipakai untuk membuat sebuah obyek pada
form Visual Basic. Setelah kontrol ditambahkan ke form, kontrol tersebut berubah
menjadi sebuah obyek yaitu elemen perantara pemakai yang dapat diprogram. Pada Tabel
2.9 dapat dilihat beberapa unit kontrol Visual Basic.
Tabel 2.9 Unit kontrol Visual Basic [12]
Gambar
Kontrol
Nama
Kontrol Awalan Fungsi
Picture Box Pic Untuk menampilkan file gambar : .bmp, .jpg, .gif,
.wmf dan .ico
Label Lbl Menampilkan teks tetapi pemakai tidak
berinteraksi dengannya atau mengubahnya
Text Box Txt Menampilkan teks
Frame Fra Mengidentifikasikan sebuah grup pengontrolan.
Command
Button Cmd
Memberikan sebuah perintah atau tindakan ketika digunakan
Check Box Chk
Memberikan perintah pilihan benar/salah (True/False) atau ya/tidak (yes/no). Pemakai dapat
memilih beberapa check box secara bersamaan.
Option Button Opt Memberikan grup pilihan. Pemakai hanya dapat
memilih satu option pada grup pilihan.
Horizontal
Scroll Bar Hsb Menampilkan balok gulung horizontal.
Vertikal Scroll
Bar Vsb Menampilkan balok gulung vertikal
Timer Tmr Untuk mengeksekusi waktu kejadian pada rutin
2.5.3 Pengaksesan port serial menggunakan MSComm [13]
Kontrol MSComm menyediakan fasilitas komunikasi antara program aplikasi
yang dibuat dengan port serial untuk mengirim atau menerima data. Beberapa property
yang sering dipakai adalah sebagai berikut :
a). CommPort : Digunakan untuk menentukan nomor port serial yang akan dipakai.
b). Setting : Digunakan untuk mengatur nilai baud rate, parity, jumlah bit data, dan
jumlah stop bit.
c). PortOpen : Digunakan untuk membuka ataupun menutup port serial yang
dihubungkan dengan MSComm.
d). Input : Digunakan untuk mengambil data string.
e). Output : Digunakan untuk menulis data string.
2.6
IC MAX 232 [14]
IC MAX 232 berfungsi untuk mengubah level tegangan TTL menjadi level RS
232 atau sebaliknya. Untuk mengubah level tegangan dari RS 232 menjadi TTL maka pin
13 atau 8 digunakan sebagai input bagi RS 232 sedangkan pin 12 atau 9 digunakan untuk
output dari sinyal TTL. Pada pengubahan level tegangan dari TTL menjadi RS 232, pin
11 atau 10 digunakan sebagai input bagi sinyal TTL sedangkan pin 7 atau 14 digunakan
untuk output bagi RS 232. Gambar 2.25 memperlihatkan IC MAX 232.
Fungsi kapasitor pada rangkaian IC MAX 232 yaitu sebagai kapasitor eksternal
untuk Voltage Doubler dan Voltage Inverter . Nilai-nilai kapasitor yang digunakan sesuai
dengan nilai-nilai yang tertera pada data sheet MAX 232 yaitu sebesar 1uF. Gambar 2.26
menunjukkan rangkaian IC MAX 232.
Gambar 2.26 Rangkaian IC MAX 232 [14]
2.7
IC MAX 491 [15]
IC MAX 491 diperlihatkan pada gambar 2.27. IC MAX 491 berfungsi untuk
mengubah level tegangan TTL menjadi level RS 485 atau sebaliknya. Kaki 5 digunakan
sebagai input dari level tegangan TTL sedangkan kaki 2 adalah output yang menghasilkan
level tegangan TTL. Kaki 4 dan 3 digunakan untuk mengontrol fungsi receiver atau
driver.
31
PERANCANGAN
Pada bab ini akan dijelaskan alur perancangan sistem untuk mengontrol 3 buah PLC
Omron CPM2A melalui sebuah PC. Perancangan meliputi desain sistem, perancangan
teknik komunikasi antara PC dengan PLC, perancangan
hardware
, dan
perancangan
software
.
Sistem hasil perancangan ini merupakan bagian dari mini DCS (
Distributed Controlled
System
).
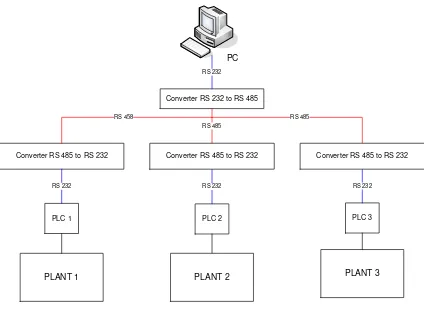
3.1
Desain Sistem
Sistem yang akan dirancang merupakan
software interface
dari PLC OMRON
CPM2A ke sebuah komputer. Koneksi antara PC dengan PLC adalah komunikasi serial
RS-232. Akan tetapi RS-232 tidak dapat dihubungkan secara paralel ke beberapa d
evice
(PLC),
maka untuk mengatasinya menggunakan komunikasi serial RS-485. Oleh karena itu sistem
ini menggunakan
converter
RS-232 to RS-485
dan
converter
RS-485 to RS-232
agar PC dapat
berkomunikasi secara serial dengan beberapa PLC. Setiap PLC akan mengontrol sebuah
plant
.
PC akan dijalankan dengan program
Microsoft Visual Basic
6.0. Data input dari
setiap PLC akan disimpan dalam bentuk
text file.
Blok diagram sistem komunikasi PLC
`
Converter RS 232 to RS 485
PLC 1
PLANT 1
Converter RS 485 to RS 232
PLC 3 PLC 2
RS 232 RS 232
RS 458
RS 485
RS 485
RS 232
Converter RS 485 to RS 232 Converter RS 485 to RS 232
PLANT 2 PLANT 3
PC
RS 232
Gambar 3.1
Blok Diagram Sistem
Plant
I merupakan motor DC
control drive
serta penyedia tegangan AC dan DC yang
digunakan untuk masukan tegangan pada peralatan listrik yang digunakan pada
plant
II dan
III. Kondisi terminal tegangan dan kecepatan motor DC akan disimpan dalam memori DM
pada PLC1.
Plant
II mempunyai fungsi untuk proses sterilisasi cairan. Plant II akan aktif saat
semua terminal tegangan yang dibutuhkan sudah tersedia. Pada awalnya
heater
dan
thermo
diaktifkan, kemudian setelah 15 menit pompa pada tangki 1 diaktifkan untuk mengisi tangki
2. Setelah tangki 2 terisi maka dilakukan proses pemanasan dan pengadukan sampai cairan
cairan mencapai suhu 10
0C. Setelah cairan mencapai suhu 10
0C, maka SCADA akan
mengaktifkan
plant
III. Data-data yang dibutuhkan disimpan di dalam memori DM PLC2.
3 4 5 6
7A 8
2 1B
3 4 5 6
7B 9 8
11B
10B 13
14
1A
2
12 1C
9 10A
11A 12
Gambar 3.2
Plant
2
Keterangan gambar :
1A.
Limit switch
atas 1
1B.
Limit switch
atas 2
1C.
Limit switch
bawah 1
2.
Gear
mixer
3.
Gear
motor DC
4. Motor DC
5. Sensor suhu LM 35
6. Kabel sensor suhu
7A. Komponen
heater
7B. Termoelektrik
8. Komponen
mixer
9. Katub
10A. Tangki luar II
10B. Tangki luar III
11A. Tangki dalam II
11B. Tangki dalam III
12. Pelampung
Plant
III berfungsi
dalam
proses pengisian dan pengepakan kemasan produk
minuman. Saat SCADA mengaktifkan plan III, maka konveyor
mulai
on
. Saat gelas
menyentuh sensor posisi 1 akan menyebabkan konveyor
off
dan proses pengisian cairan ke
kemasan pertama berlangsung. Apabila proses pengisian kemasan pertama telah selesai
konveyor akan
on
kembali dan saat gelas menyentuh sensor posisi
2 menyebabkan konveyor
akan
off
dan proses pengepakan berlangsung. Proses ini akan berlangsung terus sampai isi
tangki 3 habis. Data-data yang dibutuhkan juga disimpan di dalam memori DM PLC3.
Gambar 3.3
Plant
3
Keterangan gambar :
1. Elektonik
valve
1
2. Penampung cairan
3. Sensor Tanki takaran
4. Penampung cairan
5. Sensor posisi 1
6. Gulungan tutup gelas
7. Pneumatik
8. Motor
stepper
9.
Heater
(pemanas)
10. Sensor posisi 2
11. Susunan
gear
1
12. Tempat gelas
13. Penyangga rantai
14. Susunan gear 2
15. Rantai.
16.
Limit switch
batas bawah (LSB)
17.
Limit switch
batas atas (LSA)
18. Pelampung
19. Tangki pendingin
13
11 14
6
9 7
8
5 3
10 4
1
2
12 15
16 17
18
19
3.2
Perancangan teknik komunikasi antara PC dengan PLC
Format komunikasi
host link
PC dengan PLC yang akan dirancang sesuai dengan
prosedur standar pada PLC OMRON CPM2A yaitu
baud rate
9600
bps,
1
start bit,
7
bit data,
2
stop bit, even parity.
3.2.1
Node Number
PLC
PC dapat membedakan PLC dari
node number
pada PLC tersebut.
Node number
yang akan digunakan seperti pada tabel 3.1. Pemberian
node number
pada PLC dilakukan
dengan cara mengisi memori DM6648 pada bit 00 sampai 07 dengan bilangan biner.
Tabel 3.1
Node number
PLC
Node number
Isi DM 6653
PLC
00
0000000
I (Motor DC
control
drive
)
01
0000001
II (proses pasteurisasi cairan)
02 0000010
III (proses pengisian dan pengepakan produk
kemasan minuman)
3.2.2
Mode
Operasi
PLC
Mode
operasi pada PLC memegang peran yang penting dalam komunikasi antara PC
dan PLC. Pada perancangan SCADA, PLC akan diseting pada
mode
operasi
monitor.
Alasan
pemilihan
mode
monitor disebabkan karena pada
mode
ini semua instuksi
command
dapat
diproses oleh PLC, kecuali WP (
program write
). Pada mode monitor, PLC akan selalu
melakukan pembaharuan pada isi memori yang mengalami perubahan. Untuk membuat PLC
Gambar 3.4
Command frame
untuk mengubah
mode
operasi PLC [9]
Tabel 3.2 menunjukkan instruksi yang akan dikirimkan SCADA untuk membuat PLC
berada pada kondisi MONITOR. Untuk
mode
MONITOR maka isi dari
frame mode
data
adalah 02. Perbedaan setiap instruksi hanya terletak pada
node number
PLC.
Tabel 3.2
Instruksi
mode
operasi pada PLC
Instruksi
Keterangan
@00SC02
Mode PLC 1 MONITOR
@01SC02
Mode PLC 2 MONITOR
@02SC02
Mode PLC 3 MONITOR
3.2.3
Alamat Memori Data Monitor SCADA
Setiap PLC akan menyimpan data pada memori DM. Data yang tersimpan dalam
memori DM menunjukkan kondisi setiap
plant
. Tabel 3.3 menunjukkan data-data yang akan
dibaca pada PLC 1.
Tabel 3.3
Data yang dibaca dan alamat memori PLC I
Data
Alamat Memori
Kecepatan motor
DM0001
Kondisi terminal 12volt
DM0002
Kondisi terminal 12Vvolt/5A
DM0003
Kondisi terminal 220volt
DM0004
Data terminal 12V, 12V/5A, dan 220V dan -12V hanya berupa kondisi
on
atau
off
.
Pada kondisi
on
, data yang tersimpan dalam memori DM adalah 0000hex. Pada kondisi
off
,
data yang tersimpan dalam memori DM adalah 00FFhex. Data kecepatan motor merupakan
variabel angka. Data kecepatan motor yang tersimpan pada memori DM sudah dalam bentuk
bilangan desimal. Kecepatan motor maksimal yang akan digunakan adalah 50 rpm.
Tabel 3.4
Data yang dibaca dan alamat memori PLC 2
Data
Alamat Memori
Suhu tangki 1
DM0001
Suhu tangki 2
DM0002
Kondisi pompa
DM0003
Kondisi
heater
DM0004
Kondisi
Thermo
DM0005
Kondisi
mixer
1 DM0006
Kondisi
mixer
2
DM0007
Kondisi katub 1
DM0008
Kondisi sensor LSA1
DM0009
Kondisi sensor LSA2
DM0010
Pada PLC 2 data dan alamat memori yang akan dipakai dapat dilihat pada tabel 3.4.
Data suhu tangki 1 dan tangki 2 merupakan variabel angka, sedangkan data yang lain
dalam bentuk bilangan heksadesimal. Untuk konversi data heksadesimal menjadi variabel
angka dihitung dengan cara:
Suhu terendah = 0
0 CSuhu tertinggi = 80
0 CJangkauan suhu = 80
0C
Data heksa terendah = 0000
Data heksa tertinggi = 00FF
Jangkauan data = 256
Perubahan pada 1 bit data
=
Data
Jangkauan
Suhu
Jangkauan
_
_
=
255
80
= 0.31
0C
Jadi data suhu tangki yang ditampilkan = Data heksa
×
Perubahan pada 1 bit data
Tabel 3.5
Data yang dibaca dan alamat memori PLC 3
Data
Alamat Memori
Kondisi sensor
(LSB) DM0001
Kondisi katub 2
DM0002
Kondisi katub 3
DM0003
Kondisi sensor posisi 1
DM0004
Kondisi LSA tangki 3
DM0005
Kondisi LSB tangki 3
DM0006
Kondisi sensor posisi 2
DM0007
Pada PLC 3 data dan alamat memori yang akan dipakai dapat dilihat pada tabel 3.5.
Semua data pada tabel di atas merupakan kondisi
on
atau
off
, kecuali data untuk jumlah hasil
produksi. Data untuk jumlah hasil produksi adalah variabel angka. PLC 3 juga akan
menyimpan 1 data tambahan yaitu kondisi konveyor. Data kondisi konveyor
on
atau
off
dipengaruhi oleh nilai HR0001 PLC 3 dan kondisi sensor posisi 1 dan 2. HR0001 merupakan
kontrol untuk menjalankan program pada PLC 3.
Tabel 3.6
Pengaruh HR0001,
sensor posisi 1 dan 2 pada konveyor
HR 0001
Sensor posisi 1
Sensor posisi 2 Konveyor
on on off off
on off on off
on off off on
off off off off
3.2.4 Alamat Memori Data Kontrol SCADA
Untuk mengontrol PLC dari program SCADA, maka diperlukan sebuah memori atau
alamat kontrol. Pada perancangan SCADA alamat memori kontrol ditunjukkan pada tabel 3.7.
Tabel 3.7
Alamat Memori Data Kontrol SCADA
Alamat Kontrol
PLC
HR 0001
I
HR 0001
II
Alamat HR0001 diletakkan pada awal program pada setiap PLC. Pada program PLC,
HR0001 merupakan tombol NO. Jika isi memori HR0001 adalah 0000 maka kondisi tombol
NO
off
. Apabila isi memori HR0001 sama dengan 0001 maka kondisi tombol NO
on
. Jadi
HR0001 merupakan pengatur
on
atau
off
program di dalam PLC.
3.2.5
Alamat Memori Hapus Data SCADA
Data yang tersimpan pada memori DM tidak akan hilang walaupun PLC dimatikan.
Bila data yang tersimpan pada memori DM tidak dihapus, akan menyebabkan pembacaan
data tidak sesuai dengan kondisi yang sebenarnya. Oleh karena itu diperlukan pengontrol
untuk menghapus memori DM setiap PLC, seperti yang ditunjukkan pada tabel 3.8.
Tabel 3.8
Alamat Memori Hapus Data SCADA
Alamat Kontrol
PLC
HR 0002
I
HR 0002
II
HR 0002
III
3.2.6
Read
DM
Area
Pembacaan data pada memori DM dilakukan dengan mengirimkan
command frame
seperti pada gambar 3.5. Isi
frame beginning word
merupakan urutan awal alamat memori
DM yang akan dibaca. Sedangkan
frame no.of words
merupakan jumlah memori DM yang
Gambar 3.5
Command frame
untuk membaca isi memori DM [9]
Jadi
command frame
yang akan dikirimkan SCADA untuk membaca data pada memori DM
ditunjukkan seperti pada tabel 3.9
Tabel 3.9
Instruksi baca memori DM yang dikirimkan dari SCADA
Instruksi
Keterangan
@00RD00010005
Baca data PLC I
@01RD00010012
Baca data PLC II
@02RD00010007
Baca data PLC III
3.2.7
Write
HR
Area
Penulisan data pada memori HR dilakukan dengan mengirimkan
command frame
seperti pada gambar 3.6.
Gambar 3.6
Command frame
untuk menulis memori HR [9]
Jadi
command frame
yang akan dikirimkan SCADA untuk menulis data pada memori HR
Tabel 3.1
![Gambar 2.1 Sistem kendali terdistribusi [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/27.612.146.488.401.633/gambar-sistem-kendali-terdistribusi.webp)
![Gambar 2.2 Diagram blok jaringan bus I/O [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/29.612.214.438.347.620/gambar-diagram-blok-jaringan-bus-i-o.webp)
![Gambar 2.3 Aplikasi sistem SCADA pada proses produksi [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/30.612.202.432.478.692/gambar-aplikasi-sistem-scada-pada-proses-produksi.webp)
![Gambar 2.8 One-to-N communication [9]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/38.612.256.377.294.452/gambar-one-to-n-communication.webp)
![Gambar 2.9 Blok diagram prosedur host link communication PLC CPM2A [9]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/39.612.138.503.236.468/gambar-blok-diagram-prosedur-host-link-communication-plc.webp)
![Gambar 2.14 Level tegangan RS232 pada pengiriman huruf ‘A’ tanpa bit paritas [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/43.612.279.407.604.680/gambar-level-tegangan-pada-pengiriman-huruf-tanpa-paritas.webp)

![Gambar 2.24 Properties [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/49.612.250.379.577.678/gambar-properties.webp)
![Gambar 2.25 IC MAX 232 tampak atas [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1659930.2072541/51.612.278.383.583.686/gambar-ic-max-tampak-atas.webp)