9
LANDASAN TEORI
2.1 Robotika
Istilah robot yang biasa terdengar umumnya mengandung pengertian suatu alat yang menyerupai manusia atau bahkan bertingkah laku seperti manusia, namun struktur tubuhnya tidak seperti manusia melainkan terbuat dari bahan logam . Pada hakekatnya robot mengandung beberapa unsur – unsur pendukung :
a. Programable
b. Automatic (otomatis)
c. Manipulator (perangkat manipulasi)
d. Human like (mempunyai kemiripan dengan manusia) e. Controller
Dari unsur-unsur diatas jelaslah bahwa robot bukan hanya sekedar perkakas biasa, namun merupakan mesin khusus yang dapat dikontrol oleh manusia lewat suatu processor atau controller. Terdapat dua defenisi yang dapat diterima dikalangan industri mengenai robot, yaitu :
a. Menurut RIA (Robotik Institute of Amerika) robot adalah “ Manipulator yang berfungsi jamak dan dapat diprogram ulang dan dirancang untuk mengangkut material, part, peralatan atau perangkat khusus melalui peubah
b. Robot merupakan peralatan yang melakukan fungsi-fungsi yang biasa dilakukan oleh manusia, atau peralatan yang bekerja dengan kecerdasan yang mirip dengan kecerdasan manusia.
2.1.1 Klasifikasi Umum dari Robot
Berdasarkan sifat mobilitasnya, robot dapat diklasifikasikan dalam dua bagian besar, yaitu:
1. Mobile Robot
Kata mobile robot mempunyai arti bergerak, yang dimaksudkan adalah sistem robot tersebut mampu memindahkan dirinya sendiri dari posisi A ke posisi B, dimana kedua posisi tersebut berada pada jarak tertentu (keseluruhan badan robot berpindah tempat), bisa dikatakan bahwa robot tersebut bergerak dinamis.
A. Operator Oriented
Mobil robot dengan operator oriented adalah pengenalan gerakan dari robot yang membutuhkan seorang operator. Jadi seluruh gerakan robot untuk memindahkan tubuhnya tergantung dari instruksi yang diberikan oleh seorang operator.
B. Self Running
Mobil robot dengan Self Running adalah pengendalian gerakan dari robot yang berdasarkan program kemudi yang diberikan sehingga seolah-olah robot tersebut bergerak sendiri. Jenis ini tidak tergantung dari kemudi seorang operator dan juga
biasanya ditempatkan beberapa jenis
sensor untuk mendeteksi situasi sekelilingnya (untuk mengenali medan jelajahnya).
Sensor tersebut akan memberikan informasi kepada sistem robot, kemudian oleh perangkat prosessor atau controll informasi tersebut diolah, yang nantinya dijadikan sebagai acuan dalam melakukan pergerakan selanjutnya.
Self Runnning dapat dikategorikan lagi menjadi dua jika dilihat dari tingkat kecerdasan robot tersebut, yakni robot dengan kecerdasan buatan dan tanpa kecerdasan buatan. Robot dengan kecerdasan buatan memiliki maksud bahwa robot tersebut berkemampuan secara sendiri untuk merespon atau bereaksi didalam kondisi yang tidak ditentukan sebelumnya. Selanjutnya robot dengan tanpa kecerdasan buatan secara keseluruhan tergantung kepada intstruksi yang diberikan.
2. Non Mobile robot
Kebalikan dari pengertian mobil robot, maka non robot memilki pengertian sistem robot yang tidak dapat memindahkan posisinya dari suatu tempat ketempat lain. Artinya robot tersebut hanya dapat menggerakkan tubuhnya saja, misalnya ini terjadi pada perangkat manipulator yaitu lengan robot, tangan kaki dan sebagainya. Atau dengan kata lain tubuh robot berada pada posisi yang tetap.
Lengan Robot Pada skripsi ini merupakan salah satu contoh dari non mobile robot
2.1.2 Lengan robot
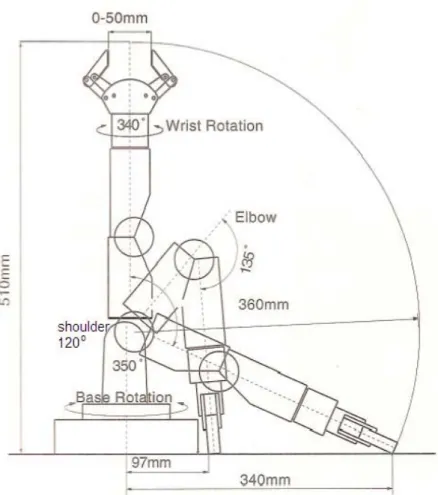
Lengan robot banyak digunakan pada industri, khususnya industri yang memerlukan ketepatan dan bekerja secara berulang – ulang. Dalam hal ini lengan robot pada sistem ini digunakan untuk mengambil dan memindahkan benda. Berat Benda yang dapat diangkat diharuskan mempunyai 2 sisi yang rata sehingga dapat dijepit oleh grip pada lengan robot.
Lengan robot yang digunakan memakai motor servo sebagai penggerak. Ada 6 motor servo yang digunakan untuk mengerakan lengan robot. Derajat kebebasan gerakan lengan robot dapat dilihat pada Contoh gambar 2.1 diatas.
2.2 Konsep Dasar Manipulator Robot
Istilah manipulator adalah sekumpulan hubungan mekanik yang terdiri dari dari rangkaian kinematic berupa link, baik sebagai rangkaian umpan balik terbuka maupun umpan tertutup yang dihubungkan dengan sendi dan mempunyai kemampuan untuk melakukan pergerakkan baik planar maupun spatial. Pergerakan secara planar adalah pergerakan sendi-sendi pada bidang parallel sedangkan secara spatial adalah pergerakan pada bidang tiga dimensi. Secara umum derajat kebebasan tersebut adalah jumlah yang dibutuhkan untuk menyatakan posisi dari setiap hubungan relative terhadap link yang tetap
Beberapa istilah dan definisi yang banyak digunakan dalam manipulator robot adalah :
1. Link
Link adalah salah satu bagian dari kerangka yang kaku atau anggota yang dihubungkan secara bersamaan untuk membentuk sebuah rangkaian kinematic.
2. Sendi (Joint)
relative yang terbatas .
Pada lengan robot/mekanik merupakan penghubung yang dapat berupa poros ataupun tumpuan dari lengan-lengan mekanik dalam pergerakkannya. Biasanya pada sendi ditempatkan motor yang dikendalikan sebagai tenaga penggerak dari lengan-lengan mekanik.
Sendi terbagi menjadi dua jenis, yaitu : sendi putar (Revolute Joint) dan sendi geser (Prismatic Joint). Revolute joint bergerak seperti engsel dan memungkinkan gerakkan memutar yang relatif antara dua lengan mekanik. Sedangan prismatic Joint memungkinkan gerakan lurus yang relatif antara dua hubungan.
Gambar 2.2 Contoh Revolute Joint
(The University Of Texas and Simmechanics.com)
Gambar 2.3 Contoh Prismatic Joint
2. End-effector
Biasa juga disebut end of arm tooling, berupa peralatan khusus yang ditempatkan pada bagian akhir dari link untuk melakukan tugas tertentu. 3. Work Space/Work Envelope
Adalah total volume ruang kerja yang dapat dijangkau oleh End-Effector ketika manipulator melakukan semua gerakan yang mungkin. 4. Akurasi
Pengukuran atas seberapa dekat sebuah manipulator dapat mencapai titik tujuan yang diinginkan pada ruang kerjanya.
5. Repeatability
Pengukuran atas seberapa dekat sebuah manipulator dapat kembali mencapai titik tujuan sebelumnya.
6. Rigidity
Tingkat kekakuan mekanik manipulator. 8. Poros gerakan
Adalah mekanisme yang memungkinkan robot untuk bergerak secara lurus atau berotasi.
9. Derajat kebebasan : adalah jumlah arah yang idenpenden dimana end- effector dari sebuah robot dapat bergerak.
Robot dengan 3 poros gerakan & 6 derajat kebebasan yang 3 derajat kebebasan mungkin bagi sebuah obyek
Gambar 2.4 Contoh Pergerakkan Joint dengan 3 dan 6 derajat kebebasan
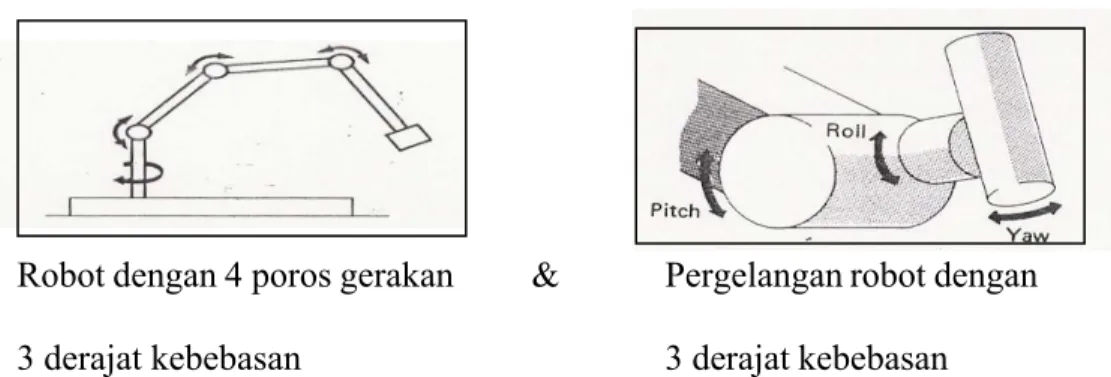
Robot dengan 4 poros gerakan & Pergelangan robot dengan 3 derajat kebebasan 3 derajat kebebasan
Gambar 2.5 Contoh Pergerakkan Joint dengan 4 dan 3 derajat kebebasan
2.2.1 Geometri robot
1. Anthropomorphic
Memiliki kesamaan dengan manusia, misalnya lengan Anthropomorphic akan serupa dengan lengan manusia dalam hal bagaimana setiap bagian dihubungkan. Lengan ini memiliki manuver
paling besar dan seringkali menjadi pilihan untuk pengecatan, namun jenis ini pergerakannya paling lambat dan akan mengalami kesulitan untuk menggerakkan ujung lengan dalam garis lurus.
Gambar 2.6 Anthropomorphic
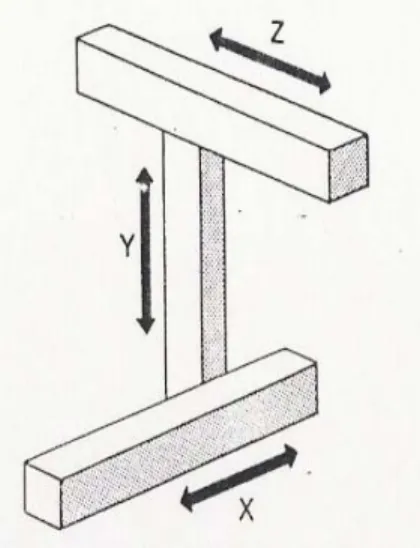
2 . Cartesian
Dapat bergerak 3 arah yang idependen yaitu sumbu X, Y dan Z. Biasanya lengan ini akan bekerja pada kerangka overhead yang dibentuk oleh sumbu x membentuk suatu lingkup kerja persegi panjang. Geometri ini digunakan untuk pekerjaan yang memiliki cakupan area yang luas dimana gerakan-gerakan yang rumit tidak terlalu dipentingkan.
Gambar 2.7 Cartesian
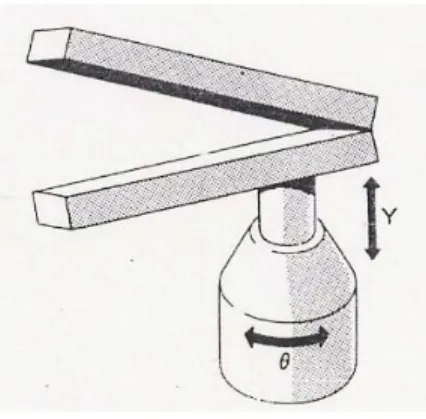
3. Silindris
Serupa dengan cartesian, kecuali bahwa ia tidak memiliki gerakan sepanjang sumbu X, sebagai gantinya, lengan dapat bergerak rotasi. Terdapat 3 poros gerakan yaitu Y, Z dan θ. Dimana θ adalah sudut rotasi.
Gambar 2.8 Silindris
4. Kutup
Hampir sama dengan silindris, lengan dengan geometri kutup memiliki sumbu Y dan θ, perbedaannya terletak pada adanya poros yang memungkinkan lengan tersebut berotas / berputar pada bidang vertikal, sebagai ganti gerakan ke atas atau ke bawah sepanjang sumbu Z. Lingkup kerjanya seperti bagian permukaaan dari sebuah bola (spherical).
Gambar 2.9 Kutup
5. SCARA (Selective Compliant Assembly Robot Arm)
vertikalnya. Pemakaiannya meluas untuk pengoperasian perakitan khususnya pada bidang elektronika.
Gambar 2.10 Scara
2.2.2 Bagian-Bagian Manipulator Lengan Robot
Secara keseluruhan sebuah system Lengan robot msnipulator terdiri dari : 1. Tangan Mekanik (Mechanical arm)
Adalah bagian dasar dari konstruksi lengan robot untuk dapat membentuk lengan robot sesuai kebutuhan dan merupakan bagian yang dikendalikan pergerakkannya
2. End-Effector
Piranti yang terpasang pada lengan robot untuk melaksanakan fungsi-fungsi tertentu.
• Jenis end-effector :
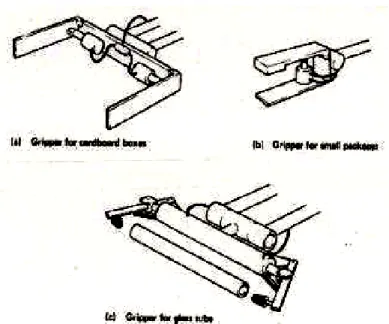
1. Gripper (pencengkram)
Piranti untuk memegang dan mencengkram obyek, misalnya : tangan mekanik, piranti pengait, magnet atau penghisap.
Gambar 2.11 Jenis End-effector Gripper
2. Tool (peralatan)
Piranti yang digunakan robot untuk melakukan operasi pada suatu obyek. Misalnya : bor, penyemprot cat, gerinda, alat las dan lain-lain. • Gerakan robot pada end-effector
1. Point to point control (Gripper) 2. Continous path control (Tool) • Jenis Gripper :
1. Kontak (jig) : Robot melakukan aktivitas terhadap suatu obyek tertentu, seperti melakukan pengelasan, pemotongan, pengeboran.
2. Gripper kasar : Tidak membutuhkan ketepatan.
4. Perakitan : Posisi yang akurat dan umpan balik sensor yang memungkinkan robot memantau dan memperbaiki gerakan yang dilakukannya.
• Jenis Tool (Peralatan) : 1. Pengelasan (welding) :
¾ Inert gas : metal (MIG) dan Tungsten (TIG) - Spot welding (las titik)
- Stud welding
2. Pengecatan semprot (Paint spraying) 3. Deburring
4. Nut runner
3. Penggerak (Actuator)
Istilah yang digunakan untuk mekanisme yang menggerakkan lengan robot. Aktuator dapat berupa hidrolik dan pneumatik
yang digunakan untuk mengendalikan persendian prismatik karena dapat menghasilkan gerakan linier secara langsung (sering disebut dengan penggerak linier)., atau pula aktuator motor listrik yang menghasilkan gerakan rotasi. Penggerak yang umum digunakan pada saat ini adalah penggerak motor servo. Penggerak ini lebih mudah dikontrol dibanding penggerak lainnya
4. Sensor/Transducer
Sensor dipergunakan manipulator agar dapat berinteraksi dengan lingkungan kerjanya. Sensor juga dipergunakan sebagai input umpan balik pada proses pengendalian manipulator
5. Pengendali (Controller)
Pengendali adalah mekanisme (baik secara perangkat keras maupun perangkat lunak) yang dipergunakan untuk mengatur seluruh pergerakan atau proses yang dilakukan manipulator
6. Antar muka (Interface)
7. Sumber Tenaga (External Power Unit)
2.3 Aktuator Robot
Aktuator dasar yang sering digunakan sebagai penghasil gerakkan, yaitu motor DC magnet permanent, motor DC brushles, motor DC servo, aktuator pneumatik dan aktuator hidrolik, dalam perancangan lengan robot pada skripsi
ini untuk aktuatornya menggunakan motor servo, untuk itu dalam bab ini yang dibahas hanya khusus pada motor servo saja.
2.3.1 Servo Motor
Servo motor adalah motor DC yang memiliki sistem close loop. Pada dasarnya motor DC bekerja secara open loop, dimana putaran motor yang dihasilkan tidak diketahui kecepatan dan kekuatannya hingga hanya dapat digunakan pada sistem yang mencari arah perputaran dan bukan penempatan posisi. Seperti apa bentuk motor servo, dapat dilihat pada Gambar 2.10 berikut ini:
Gambar 2.13 Motor Servo
Di dalam servo terdapat sebuah motor, beberapa buah gear untuk mengurangi kecepatan dari motor, sebuah papan controller dan sebuah potentiometer. Motor dan potentiometer dihubungkan ke papan controller, sehingga ketiganya membentuk sistem close loop. Dengan sistem close loop itulah, putaran motor yang dihasilkan dapat diketahui dan dikembalikan lagi ke controllernya sehingga putarannya walaupun menggunakan motor DC
dapat dikendalikan kekuatan dan kecepatannya. Seperti apa bagian dalam motor servo, dapat dilihat pada Gambar2.11 berikut ini:
Gambar 2.14 Bagian dalam Motor Servo
Servo motor terdiri dari beberapa jenis dan ukuran, mulai dari ukuran yang sangat kecil hingga ukuran yang sangat besar. Servo motor yang berukuran kecil biasanya disebut sebagai servo hobi dan dapat digunakan pada pesawat atau mobil radio kontrol dan tentunya juga dapat digunakan pada robot. Servo motor yang berukuran besar biasanya disebut sebagai servo industri dan digunakan pada alat – alat berukuran besar yang memerlukan motor penggerak yang lebih presisi.
2.3.2 Cara Pengendalian Motor Servo
Servo motor dikendalikan dengan memberikan inputan berupa PWM (Pulse Width Modulation). Sinyal PWM yang diberikan ke servo merupakan sinyal yang proporsional besarnya terhadap posisi poros output servo tersebut. Secara spesifik, dalam perulangan setiap 20 ms, sinyal PWM sebesar 1 ms akan menghasilkan output shaft yang bergerak ke posisi paling kiri. Dengan
perulangan yang sama, sinyal PWM sebesar 2 ms akan menghasilkan output shaft yang bergerak ke arah paling kanan. Dengan demikian, untuk sinyal PWM yang besarnya 1,5 ms akan menghasilkan posisi ditengah – tengah. Sebuah hobby servo pada umumnya hanya dibatasi untuk pergerakan 180 derajat. Walaupun ada beberapa servo yang disebut sebagai continuous rotation, sebenarnya servo jenis ini hanyalah servo biasa yang output shaft telah diputus dari potensiometer. Semakin besar atau kecil sinyal yang diberikan, semakin cepat atau lambat bahkan berbeda arah pergerakannya.
2.4 Teori Dasar Sistem Kontrol
Sistem Kontrol adalah system yang terdiri atas beberapa komponene yang bekerja bersama-sama dan saling berinteraksi untuk menghasilkan suatu keluaran tertentu sesuai dengan masukkan referensi yang diinginkan. Bagian yang dikendalikan pada system control disebut kendalian (kontroler). Kendalian merupakan suatu system fisis yang dapat berupa sekumpulan peralatan mekanis, kimiawi, dan lain-lain yang biasa dinamakan perangkat keras.
Sistem Kontrol pada dasarnya terbagi menjadi dua jenis, yaitu: 1. Sistem kendali lingkar terbuka (Opened loop control system) 2. Sistem Kendali lingkar tertutup (Closed loop control system)
2.4.1 Sistem Kontrol Loop Tertutup
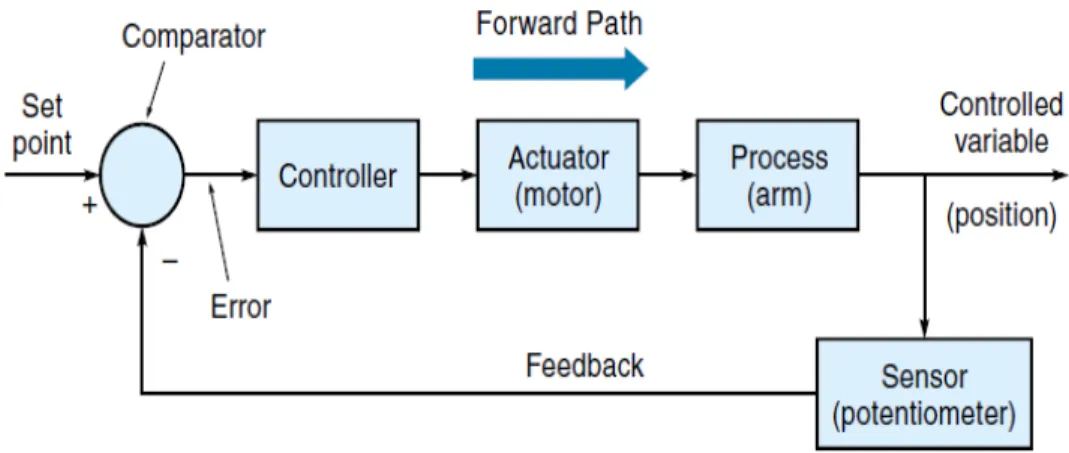
Sistem kendali lingkar tertutup adalah system kendali dimana keluaran dari system akan mempengaruhi aksi kendalian. Hal ini dapat terjadi dikarenakan nilai keluaran dari system akan diumpan balikkan sebagai
perbandingan terhadap nilai input. Nilai perbedaan antara sinyal masukkan dan umpan balik diteruskan ke pengendali untuk memberikan sinyal keluaran yang berfungsi memperbaiki kesalahan dan menghasilkan nilai keluaran yang dikehendaki. Proses hubungan antara nilai keluaran dan masukkan diatas akan berlangsung secara terus-menerus (continue)
Gambar dibawah ini adalah salah satu contoh dari suatu system kendali lingkar tertutup (Closed Loop) :
Gambar 2.15 Sistem Kendali Lingkar Tertutup
Kelebihan pada system kendali lingkar tertutup terletak pada penggunaan sinyal keluaran sebagai umpan balik yang membuat respon system relative kurang peka terhadap gangguan. Namun kestabilan pada system pengendalian harus dijaga. Karena cenderung terjadi koreksi berlebih yang dapat menimbulkan osilasi pada system.
2.4.2 Sistem Kontrol Loop Terbuka
Gambar 2.16 Kontrol Robot Loop Terbuka
Kontrol loop terbuka atau umpan maju (feedforward control) dapat dinyatakan sebagai sistem kontrol yang outputnya tidak diperhitungkan ulang oleh kontroler. Keadaan apakah robot benar-benar telahmencapai target seperti yang dikehendakisesuai referensi, adalah tidak dapat mempengaruhi kinerja kontroler. Kontrol ini sesuai untuk sistem operasi robot yang memiliki aktuator yang beroperasi berdasarkan umpan logika berbasisi konfigurasi langkah sesuai urutan, misalnya stepper motor. Stepper motor tidak perlu dipasangi sensor pada porosnya untuk mengetahui posisi akhir. Jika dalam keadaan berfungsi baik dan tidak ada masalah beban lebih maka stepper motor akan berputar sesuai dengan perintah kontroler dan mencapai posisi target dengan tepat.
2.5 Pengendali Robot
Beberapa model robot digerakkan menurut remote yang dipegang oleh manusia. Remote control tersebut dapat terhubung ke robot melalui kabel maupun gelombang radio, Seperti robot yang ditunjukkan oleh Gambar 2.17, Robot-robot jenis ini umumnya sangat berguna untuk tujuan explorasi dimana mereka dapat menggantikan peran manusia di daerah yang berbahaya,
pengendalian robot pada skripsi ini mengarah untuk pengendalian pada lengan robot seperti contoh gambar 2.18 adalah salah satu lengan robot produksi dari http://www.red5.co.uk, robot arm dengan control joystick yang terhubung melalui kabel, dalam hal ini lengan robot dapat terkendali berdasarkan inputan dari joystick pengontrol, pengontrol lengan robot ini dapat digunakan untuk mengangkat dan memindahkan barang dengan memanfaatkan fungsi dari grip lengan robot tersebut.
Gambar 2.17 Robot semi autonomous URBIE (sumber : http://www.columbus2space.org)
Gambar 2.18 Arm Robot
2.5.1 Kontrol Dengan Lengan Pengendali
Pengontrol dengan Lengan pengendali mekanik pada skripsi ini adalah termasuk pengontrol manual untuk mengendalikan lengan robot yang konstruksinya untuk digerakkan oleh lengan manusia, lengan pengendali mekanik ini posisinya bersifat permanen pada basenya (tempatnya) sehingga konstruksi lengan pengendali mekanik ini (terdiri dari acrylic dan potensiometer) sama dengan konstruksi lengan robotnya ( terdiri dari susunan motor servo) yang juga posisinya permanen berada pada basenya.
2.6 Mikrokontroler AVR ATMega8535
ATMega 8535 adalah mikrokontroler keluaran dari Atmel yang mempunyai arsitektur RISC yang dimana setiap instruksi akan dieksekusi hanya dengan menggunakan satu clock cycle sehingga proses eksekusi data lebih cepat daripada arsitektur CISC [9].
Mikrokontroler ini mempunyai beberapa fitur antara lain yaitu 130 instruksi, 32 register umum, Nonvolatile Program dan Data Memories yang dimana data akan dan program akan tersimpan walaupun tidak ada tegangan yang dialirkan ke mikrikontroler tersebut, 8-Kbyte Flash Memory yang dapat dihapus dan diprogram sampai 10.000 kali, 512-Byte EEPROM ( Electronic Erasable Programable Read Only Memory ) yang dapat ditulis dan dihapus sebanyak 100.000 kali, 512-Byte internal SRAM ( Static Random Access Memory), RTC dengan osilator terpisah, 4 jalur PWM, 10 bit
ADC, 32 jalur input / output yang dapat diprogram yang dibagi menjadi 4 buah port yaitu port A, port B, port C dan port D.
Secara umum AVR dibagi menjadi tiga kelompok, yaitu: 1. TinyAVR
- Mempunyai program memori sebesar 1-8 kB - Dikemas dalam bentuk package 8–20 pin - Mempunyai fungsi – fungsi terbatas
2. MegaAVR
- Mempunyai program memori sebesar 4-256 kB
- Dikemas dalam bentuk package 28-100 pin dengan contoh yang dapat dilihat pada Gambar 2.16.
- Mempunyai instruction set yang lebih variatif
- Mempunyai fungsi – fungsi yang lebih banyak yang tergabung secara internal seperti yang dilihat pada Gambar2.17
3. Application specific AVR
Merupakan tipe MegaAVR yang telah dirancang untuk melakukan fungsi tambahan yang lebih specific, seperti LCD controller, USB, PWM dan lainnya.
2.6.1 Konfigurasi Pin AVR ATMega8535
Gambar 2.19 Konfigurasi Pin AVR ATMega 8535
Port A (PA7..PA0) mempunyai fungsi sebagai 8-bit port I/O bidirectional yang jika digunakan sebagai input perlu diberi eksternal pull-down dan dapat juga digunakan sebagai Analog to Digital Converter ( ADC ).
Port B (PB7..PB0) berfungsi sebagai 8-bit port I/O bi-directional dengan internal pull-up. Port B juga mempunyai beberapa fungsi lain. Fungsi-fungsi tersebut dapat dilihat pada Tabel 2.1.
Port Pin Fungsi La in
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/Slave Output) PB5 MOSI (SPI Bus Master output/Slave input) PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer / Counter 0 output Compare Match Output) PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External interrupt 2 input)
PB1 T1 (Timer / Counter1 External Counter Input) PB0 T0 (Timer / Counter0 External Counter Input) XCK (USART External Clock Input / Output)
Port C (PC7..PC0) berfungsi sebagai 8-bit port I/O bi-directional dengan internal pull-up dan jika digunakan sebagai input perlu diberi eksternal pull- down
Tabel 2.2 Fungsi Lain Port D AVR ATMega8535
Port D (PC7..PC0) berfungsi sebagai 8-bit port I/O bi-directional dengan internal pull-up. Port D juga mempunyai beberapa fungsi lain yang dapat dilihat pada tabel 2.2.
Pin reset berfungsi me-reset fungsi dari input dan mikrokontroller. Pin ini akan aktif jika diberi ground lebih dari panjang pulsa minimum (aktif LOW).
2.6.2 Struktur Arsitektur AVR ATMega8535
Mikrokontroler ATMega8535 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan unjuk kerja dan paralelisme. Instruksi instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil (pre-fetched) dari
Port Pin Fungsi Lain
PD7 OC2 (Timer / Counter2 Output Compare Match Output) PD6 ICP1 (Timer / Counter1 Input Capture Pin)
PD5 OC1A (Timer / Counter1 Output Compare A Match Output) PD4 OC1B (Timer / Counter1 Output Compare B Match Output) PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input) PD1 TXD (USART Output Pin) PD0 RXD (USART Input Pin)
memori program. Konsep inilah yang memungkinkan instruksi-instruksi dapat dieksekusi dalam setiap satu siklus clock
Gambar 2.20 Arsitektur AVR ATMega8535
ATMega8535 memiliki bagian-bagian sebagai berikut:
1. Saluran I/O sebanyak 32 buah yang terpisah menjadi 4 bagian, yaitu Port A, Port B, Port C dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. Internal SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
2.7 Komunikasi Serial
Semua sistem yang tidak bersifat stand alone selalu memerlukan cara untuk berkomunikasi ke siatem lain baik untuk display, penyimpanan, maupun pemrosesan lebih lanjut. Dengan ukuran mikrokontroller yang kecil, kebutuhan untuk melakukan komunikasi data jumlah besar dengan menggunakan jumlah pin yang sedikit sangat diperlukan. Dengan memperhatikan kebutuhan ini, komunikasi serial dipergunakan.
2.7.1 Komunikasi serial synchronous dan asynchronus
Dua tipe dasar dari komunikasi serial adalah komunikasi secara synchronous dan asynchronous. Sebuah sistem komunikasi synchronous, kedua alat yang saling bertukar data harus selalu melakukan sinkronisasi untuk
mengetahui status keaktifan bit data yang dikirim/diterima. Proses sinkronisasi ini akan terus berjalan walaupun pada saat itu tidak terdapat data yang sedang dikirim/diterima. Komunikasi serial synchronous ini dapat menghasilkan jumlah bit per second(bps) yang lebih besar dibandingkan asynchronous karena tidak memerlukan start maupun stop bit, namun tidak sepopuler komunikasi asynchronous karena memerlukan resource yang lebih besar dan IBM PC yang telah menjadi standar Personal Computer pada umumnya hanya mempunyai support untuk Asynchronous Serial
Communication.
Asynchronous yang berarti ’tanpa sinkronisasi’ tidak memerlukan line untuk sinkronisasi, dan dengan ini dapat melakukan komunikasi full duplex dengan jumlah I/O line yang sangat minim. Sebagai pengganti proses sinkronisasi, sebuah startbit dan sebuah stop bit diperlukan untuk menandai awal dan akhir dari transmisi. Perlunya ditambahkan kedua bit ini membuat komunikasi secara asynchronous menjadi lebih lambat dibandingkan dengan komunikasi serial synchronous, tetapi dapat merupakan sebuah kelebihan dimana prosesor tidak akan terbebani degan proses sinkronisasi.
Sebuah line asynchronous yang sedang tidak melakukan pengiriman/penerimaan data akan mempertahankan nilai ’1’ yang juga disebut sebagai ’mark state’. Dengan menggunakan nilai ini, sebuah sistem dapat melakukan pengenalan antara sebuah line yang sedang idle (tidak melakukan pengiriman/penerimaan data) dan sebuah line yang sedang tidak tersambung / disconnected. Setiap proses pengiriman akan dilakukan, sebuah start bit yang bernila ’0’ akan dikirim, dan ketika terjadi perubahan dari nilai ’1’ ke ’0’, sistem penerima akan mengenali awal dimulainya penerimaan data. Seluruh protokol dan urutan transmisi data dapat dilihat pada Gambar 2.19.
Gambar 2.21 Protokol Komunikasi Serial Asynchronous
2.8 Sensor dan Transduser 2.8.1 Definisi
D Sharon, dkk (1982), mengatakan sensor adalah suatu peralatan yang
berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya.
Contoh; Camera sebagai sensor penglihatan, telinga sebagai sensor pendengaran, kulit sebagai sensor peraba, LDR (light dependent resistance) sebagai sensor cahaya, dan lainnya.
William D.C, (1993), mengatakan transduser adalah sebuah alat yang bila digerakan oleh suatu energi di dalam sebuah sistem transmisi, akan menyalurkan energi tersebut dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi berikutnya”. Transmisi energi ini bisa berupa listrik, mekanik, kimia, optic (radiasi) atau thermal (panas).
Contoh; generator adalah transduser yang merubah energi mekanik menjadi energi listrik, motor adalah transduser yang merubah energi listrik menjadi energi mekanik, dan sebagainya.
William D.C, (1993), mengatakan alat ukur adalah sesuatu alat yang berfungsi memberikan batasan nilai atau harga tertentu dari gejala-gejala atau sinyal yang berasal dari perubahan suatu energi.
Contoh: voltmeter, ampermeter untuk sinyal listrik; tachometer, speedometer untuk kecepatan gerak mekanik, lux-meter untuk intensitas cahaya, dan sebagainya.
2.8.2 Persyaratan Umum Sensor dan Transduser
Dalam memilih peralatan sensor dan transduser yang tepat dan sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini : (D Sharon, dkk, 1982)
a. Linearitas
Sebuah output linier dari sensor sangat diinginkan. Hubungan pengukuran antara sinyal dengan output sensor adalah linier
Ada banyak sensor yang menghasilkan sinyal keluaran yang berubah secara kontinyu sebagai tanggapan terhadap masukan yang berubah secara kontinyu. Sebagai contoh, sebuah sensor panas dapat menghasilkan tegangan sesuai dengan panas yang dirasakannya. Dalam kasus seperti ini, biasanya dapat diketahui secara tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa sebuah grafik. Gambar 1.1 memperlihatkan hubungan dari dua buah sensor panas yang berbeda. Garis lurus pada gambar 2.20(a). memperlihatkan tanggapan linier, sedangkan pada gambar 2.20(b). adalah tanggapan non-linier.
Gambar 2.22. Keluaran dari transduser panas (D Sharon dkk, 1982).
b. Sensitivitas
Sensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”. Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu volt per derajat”, yang berarti perubahan satu derajat pada masukan akan menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepakaan dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan paga gambar 2.20(b) akan lebih peka pada temperatur yang tinggi dari pada temperatur yang rendah.
c. Tanggapan Waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya terhadap perubahan masukan. Sebagai contoh, instrumen dengan tanggapan frekuensi yang jelek adalah sebuah termometer merkuri. Masukannya adalah temperatur dan keluarannya adalah posisi merkuri. Misalkan perubahan temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu, seperti tampak pada gambar 2.21(a).
Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam satuan hertz (Hz). (1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per detik). Pada frekuensi rendah, yaitu pada saat temperatur berubah secara lambat, termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila perubahan temperatur sangat cepat lihat gambar 2.21(b) maka tidak diharapkan akan melihat perubahan besar pada termometer merkuri, karena ia bersifat lamban dan hanya akan menunjukan temperatur rata-rata.
Ada bermacam cara untuk menyatakan tanggapan frekuensi sebuah sensor. Misalnya “satu milivolt pada 500 hertz”. Tanggapan frekuensi dapat pula dinyatakan dengan “decibel (db)”, yaitu untuk membandingkan daya keluaran pada frekuensi tertentu dengan daya keluaran pada frekuensi referensi.
2.8.3 Jenis Sensor dan Transduser
Perkembangan sensor dan transduser sangat cepat sesuai kemajuan teknologi otomasi, semakin komplek suatu sistem otomasi dibangun maka semakin banyak jenis sensor yang digunakan.
Robotik adalah sebagai contoh penerapan sistem otomasi yang kompleks, disini sensor yang digunakan dapat dikatagorikan menjadi dua jenis sensor yaitu: (D Sharon, dkk, 1982)
a. Internal sensor,yaitu sensor yang dipasang di dalam bodi robot.
Sensor internal diperlukan untuk mengamati posisi, kecepatan, dan akselerasi berbagai sambungan mekanik pada robot, dan merupakan bagian dari mekanisme servo.
b. External sensor, yaitu sensor yang dipasang diluar bodi robot. Sensor eksternal diperlukan karena dua macam alasan yaitu: 1) Untuk keamanan dan
Yang dimaksud untuk keamanan” adalah termasuk keamanan robot, yaitu perlindungan terhadap robot dari kerusakan yang ditimbulkannya sendiri, serta keamanan untuk peralatan, komponen, dan orang-orang dilingkungan dimana robot tersebut digunakan. Berikut ini adalah dua contoh sederhana untuk mengilustrasikan kasus diatas.
Contoh pertama: andaikan sebuah robot bergerak keposisinya yang baru dan ia menemui suatu halangan, yang dapat berupa mesin lain misalnya. Apabila robot tidak memiliki sensor yang mampu mendeteksi halangan tersebut, baik sebelum atau setelah terjadi kontak, maka akibatnya akan terjadi kerusakan.
Contoh kedua: sensor untuk keamanan diilustrasikan dengan problem robot dalam mengambil sebuah telur. Apabila pada robot dipasang pencengkram mekanik (gripper), maka sensor harus dapat mengukur seberapa besar tenaga yang tepat untuk mengambil telor tersebut. Tenaga yang terlalu besar akan menyebabkan pecahnya telur, sedangkan apabila terlalu kecil telur akan jatuh terlepas.
Sensor untuk penuntun atau pemandu, Kategori ini sangatlah luas, sebagai contoh berikut : Sensor untuk penuntun diharapkan cukup canggih dalam pengelasan. Untuk melakukan operasi dengan baik, robot haruslah menggerakkan tangkai las sepanjang garis las yang telah ditentukan, dan juga bergerak dengan kecepatan yang tetap serta mempertahankan suatu jarak tertentu dengan permukaannya.
Sesuai dengan fungsi sensor sebagai pendeteksi sinyal dan meng-informasikan sinyal tersebut ke sistem berikutnya, maka peranan dan
fungsi sensor akan dilanjutkan oleh transduser. Karena keterkaitan antara sensor dan transduser begitu erat maka pemilihan transduser yang tepat dan sesuai juga perlu diperhatikan.
2.8.4 Klasifikasi Sensor
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan menjadi 3 bagian yaitu:
a. sensor thermal (panas) b. sensor mekanis
c. sensor optik (cahaya)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi ruang tertentu.
Contohnya; bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer, hygrometer, dsb.
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar, tekanan, aliran, level dsb. Contoh; strain gage, linear variable deferential transformer (LVDT), proximity, potensiometer, load cell, bourdon tube, dsb.
Sensor optic atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda atau ruangan.
Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic, dsb.
2.8.5 Klasifikasi Transduser (William D.C, 1993)
a. Self generating transduser (transduser pembangkit sendiri)
Self generating transduser adalah transduser yang hanya memerlukan
satu sumber energi.
Contoh: piezo electric, termocouple, photovoltatic, termistor, dsb.
Ciri transduser ini adalah dihasilkannya suatu energi listrik dari transduser secara langsung. Dalam hal ini transduser berperan sebagai sumber tegangan.
b. External power transduser (transduser daya dari luar)
External power transduser adalah transduser yang memerlukan sejumlah energi dari luar untuk menghasilkan suatu keluaran.
Contoh: RTD (resistance thermal detector), Starin gauge, LVDT (linier variable differential transformer), Potensiometer, NTC, dsb.
Tabel berikut menyajikan prinsip kerja serta pemakaian transduser berdasarkan sifat kelistrikannya.
Tabel 2.3 Kelompok
Transduser Parameter
listrik dan kelas transduser
Prinsip kerja dan sifat
alat Pemakaian alat
Transduser Pasif
Potensiometer Perubahan nilai tahanan karena posisi kontak bergeser
Tekanan,
pergeseran/posisi Strain gage Perubahan nilai
tahanan akibat perubahan panjang kawat oleh tekanan dari luar
Transformator selisih
(LVDT) Tegangan selisih dua kumparan primer akibat pergeseran inti trafo
Tekanan, gaya, pergeseran Gage arus pusar Perubahan induktansi
kumparan akibat perubahan jarak plat
Pergeseran, ketebalan
Transduser Aktif
Sel fotoemisif Emisi elektron akibat radiasi yang masuk pada permukaan fotemisif
Cahaya dan radiasi
Photomultiplier Emisi elektron sekunder akibat radiasi yang masuk ke katoda sensitif cahaya
Cahaya, radiasi dan relay sensitif cahaya Termokopel Pembangkitan ggl
pada titik sambung dua logam yang berbeda akibat dipanasi
Temperatur, aliran panas, radiasi
Generator kumparan putar (tachogenerator)
Perputaran sebuah kumparan di dalam medan magnit yang membangkitkan
tegangan
Kecepatan, getaran
Piezoelektrik Pembangkitan ggl bahan kristal piezo akibat gaya dari luar
Suara, getaran, percepatan, tekanan Sel foto tegangan Terbangkitnya
tegangan pada sel foto akibat rangsangan energi dari luar
Cahaya matahari
Termometer tahanan (RTD) Perubahan nilai tahanan kawat akibat perubahan temperatur
Temperatur, panas Hygrometer tahanan Tahanan sebuah strip
konduktif berubah terhadap kandungan uap air
Kelembaban relatif
Termistor (NTC) Penurunan nilai tahanan logam akibat kenaikan temperatur
Temperatur Mikropon kapasitor Tekanan suara
mengubah nilai kapasitansi dua buah plat
Pengukuran reluktansi Reluktansi rangkaian magnetik diubah dengan mengubah posisi inti besi sebuah kumparan
Tekanan, pergeseran, getaran, posisi
Tabel 2.3 Kelompok Transduser, Sumber: William D.C, (1993)
2.8.6 Sensor Mekanik
Pergerakkan mekanis adalah tindakan yang paling banyak dijumpai dalam kehidupan sehari-hari, seperti perpindahan suatu benda dari suatu posisi ke posisi lain, kecepatan mobil di jalan raya, dongrak mobil yang dapat mengangkat mobil seberat 10 ton, debit air didalam pipa pesat, tinggi permukaan air dalam tanki.
Semua gerak mekanis tersebut pada intinya hanya terdiri dari tiga macam, yaitu gerak lurus, gerak melingkar dan gerak memuntir. Gerak mekanis disebabkan oleh adanya gaya aksi yang dapat menimbulkan gaya reaksi. Banyak cara dilakukan untuk mengetahui atau mengukur gerak mekanis misalnya mengukur jarak atau posisi dengan meter, mengukur kecepatan dengan tachometer, mengukur debit air dengan rotameter dsb. Tetapi jika ditemui gerakan mekanis yang berada dalam suatu sistem yang kompleks maka diperlukan sebuah sensor untuk mendeteksi atau mengimformasikan nilai yang akan diukur.
2.8.7 Potensiometer
Potensiometer yang tersedia di pasaran terdiri dari beberapa jenis, yaitu: potensiometer karbon, potensiometer wire wound dan potensiometer metal film.
1. Potensiometer karbon adalah potensiometer yang terbuat dari bahan karbon harganya cukup murah akan tetapi kepressian potensiometer ini sangat rendah biasanya harga resistansi akan sangat mudah berubah akibat pergeseran kontak.
2. Potensiometer gulungan kawat (wire wound) adalah potensiometer yang menggunakan gulungan kawat nikelin yang sangat kecil ukuran penampangnya. Ketelitian dari potensiometer jenis ini tergantung dari ukuran kawat yang digunakan serta kerapihan penggulungannya.
3. Metal film adalah potensiometer yang menggunakan bahan metal yang dilapiskan ke bahan isolator
Gambar 2.24 Jenis Potensiometer
Potensiometer karbon dan metal film jarang digunakan untuk kontrol industri karena cepat aus. Potensiometer wire wound adalah potensiometer yang menggunakan kawat halus yang dililit pada batang metal. Ketelitian
potensiometer tergantung dari ukuran kawat. Kawat yang digunakan biasanya adalah kawat nikelin.
Penggunaan potensiometer untuk pengontrolan posisi cukup praktis karena hanya membutuhkan satu tegangan eksitasi dan biasanya tidak membutuhkan pengolah sinyal yang rumit. Kelemahan penggunaan potensiometer terutama adalah:
1. Cepat aus akibat gesekan
2. Sering timbul noise terutama saat pergantian posisi dan saaat terjadi lepas kontak
3. Mudah terserang korosi 4. Peka terhadap pengotor
Potensiometer linier adalah potensiometer yang perubahan tahanannya sangat halus dengan jumlah putaran sampai sepuluh kali putaran (multi turn). Untuk keperluan sensor posisi potensiometer linier memanfaatkan perubahan resistansi, diperlukan proteksi apabila jangkauan ukurnya melebihi rating, linearitas yang tinggi hasilnya mudah dibaca tetapi hati-hati dengan friksi dan backlash yang ditimbulkan, resolusinya terbatas yaitu 0,2 – 0,5%
2.8.8 Linearitas - Potensiometer
Linearitas, adalah gambaran tentang penyimpangan sensor dari perilaku garis lurus idealnya.
Linearitas sangat diinginkan karena segala perhitungan dapat dilakukan dengan mudah jika sensor dapat diwujudkan dalam persamaan garis lurus.
Potensiometer dapat merupakan sensor analog yang paling sederhana namun sangat berguna untuk mendeteksi posisi putaran, misalnya kedudukan sudut poros aktuator berdasarkan nilai resistansi pada putaran porosnya. Gambar 2.25 berikut ini adalah sebuah potensiometer presisi yang dipasang pada poros sendi robot tangan.
Gambar 2.25 Potensiometer Sebagai Sensor Posisi
Yang perlu diperhatikan dalam penggunaan potensiometer sebagai sensor analog adalah masalah linearitas output terhadap besaran yang diukurnya . Jika yang diukur adalah sudut maka nilai perubahan resistansi yang direpresentasikan dalam perubahan tegangan output harus berbanding lurus dengan perubahan sudut yang dideteksi. Gambar 2.27 mengilustrasikan keadaan ini. k adalah konstanta konversi tegangan output potensiometer ke besaran sudut. Sebagai misal, Vout mempunyai jangkauan (0-3)V sedang sudut yang diukur adalah (0-300)°, maka perputaran 1° dan 10° adalah setara dengan perubahan tegangan output sebesar,
Vout (10°) = (10/300)3V = 0,1 V
Penggunaan Potensiometer linear pada perancangan alat di skripsi ini berfungsi untuk menentukan batas sudut dari putaran sevo. dimana perubahan nilai pada potensio akan berbanding lurus dengan perubahan sudut putar pada motor servo, Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo. Metode ini dikenal dengan sebutan Pulse Width Modulation (PWM)
Gambar 2.26 Posisi Motor Servo berdasarkan PWM
Dengan pengontrolan pada potensiometer linear ini penulis akan membuat perubahan sudut pada motor servo berubah secara linear
Hubungan antara output dan input dapat diwujudkan dalam persamaan garis lurus.
Grafik Perubahan Linear Antara Potensiometer dengan Perubahan Sudut Motor Servo
Gambar 2.27 Grafik Hubungan antara Nilai Tegangan Perubahab Potensio dgn Nilai Sudut Motor Servo
2.9 Analog to Digital Converter (ADC)
Konsep system konversi Analog ke Digital atau Analog to Digital converter (ADC) adalah proses pengambilan (sampling) suatu data sinyal analog dengan kuantisasi pengambilan yang mempunyai waktu periode cuplik (sampling rate). Berdasarkan jumlah pengambilan data tersebut, maka setiap pengambilan data tersebut mempunyai nilai besaran analog yang dapat dikonversikan ke nilai digital. Nilai analog yang diambil dapat berupa nilai dari tegangan sinyal analog, kemudian diterjemahkan kedalam bilangan digital. Nilai yang didapat dari sinyal analog dikonversikan ke dalam suatu bilangan biner. Sebagai contoh suatu nilai yang didapat dari proses analog adalah 3 volt, maka nilai ini dikonversi ke bilangan digital menjadi 011. Secara teoritis, fungsi transfer ideal untuk konverter analog-ke-digital (ADC,
Nilai Sudut Motor Servo, (radian)
Perubahan pada Potensiometer Vout (V) = k . Vout
analog-to-digital converter) berbentuk garis lurus (Gambar 2.24). Bentuk ideal garis lurus hanya dapat dicapai dengan konverter data beresolusi tak-hingga. Karena tidak mungkin mendapatkan resolusi tak hingga, maka secara praktis fungsi tranfer ideal tersebut berbentuk gelombang tangga seragam. Semakin tinggi resolusi ADC, semakin halus gelombang tangga tersebut.
Gambar 2.28 Bit A/D Transfer Curve
ADC ideal secara unik dapat merepresentasikan seluruh rentang masukan analog tertentu dengan sejumlah kode keluaran digital. Oleh karena sinyal analog bersifat kontinu sedangkan sinyal digital bersifat diskrit, maka ada proses kuantisasi yang menimbulkan kekeliruan. Apabila jumlah sinyal diskritnya (yang mewakili rentang masukan analog) ditambah, maka lebar undak (step width) akan semakin kecil dan fungsi transfer akan mendekati garis lurus ideal.