BAB II
LANDASAN TEORI
2.1. Teori Navigasi
Kata "Navigasi" berasal dari bahasa Latin dan berasal dari kata-kata Navis, yang berarti "kapal", dan agere, pada dasarnya berarti "bertindak". Kata "Nautics", yang timbul dari Yunani, memiliki arti yang sama. Menurut Farrel (2008) bahwa Navigasi dapat diartikan menjadi dua pengertian umum :
a) Penentuan secara akurat kondisi/keberadaan kendaraan (vehicle state), antara lain posisi, kecepatan, dan sikap (attitude) nya.
b) Merencanakan dan melaksanakan maneuver yang berguna untuk perpindahan menuju lokasi yang diinginkan.
Navigasi merupakan salah satu sistem yang sangat dibutuhkan dalam perkembangan teknologi sekarang ini, secara umum dalam dunia transportasi (darat, laut dan udara). Untuk beberapa kegunaan dari navigasi adalah untuk mengurangi banyak penggunaan energi, contohnya seperti untuk menempuh lokasi yang paling terdekat ketujuan, menghindari terjadinya tabrakan (untuk navigasi udara). Beberapa contoh peralatan navigasi yang sering digunakan yaitu GPS, Kompas (analog dan digital), Peta dan masih banyak jenis lainnya.
Dalam perkembangan teknologi robot, masalah navigasi muncul karena pertanyaan umum berikut ini : “Dimana saya?”, “Kemana saya akan pergi?”, dan “Bagaimana saya kesana?” (Leonard and Durrant-Whyte. 1991). Untuk menjawab
ketiga pertanyaan tersebut, banyak penelitian yang dilakukan untuk mendapatan sensor yang dapat menunjukkan posisi robot beroda terhadap lingkungannya. Untuk mendapatkan nilai dari posisi robot tersebut dapat dilakukan dengan cara pengukuran posisi relatif. Pengukuran posisi relatif dilakukan dengan langkah berikut :
a) Odometry. Metode ini dapat digunakan untuk menentukan posisi robot terhadap lingkungannya dengan cara mengunakan encoder untuk mengukur rotary roda dan / atau orientasi kemudi. Untuk metode ini dapat dikenal juga dengan Dead Reckoning.
b) Metode Inertial Navigasi. Metode ini banyak menggunakan giroskop dan kadang-kadang accelerometers untuk menghitung tingkat rotasi dan kecepatan.
2.1.1. Dead Reckoning
Dead Reckoning adalah adalah prosedur matematika sederhana untuk menentukan lokasi sekarang kapal dengan memajukan beberapa posisi sebelumnya melalui kursus dikenal dan informasi kecepatan lebih panjang waktu tertentu [Dunlap dan Shufeldt 1972]? Dead Reckoning ini banyak dipergunakan untuk membangun sistem navigasi dari robot beroda maupun yang berkaki. Penerapan dead reckoning pada penelitian robot lebih dikenal dengan sebutan odometry. Untuk mendeteksi perubahan posisi pada jalur digunakan rotary encoder yang ditempatkan pada as roda.
kecepatan. Berikut ini beberapa sensor yang dapat digunakan untuk mendeteksi perpindahan dan kecepatan :
a) Brush encoders. b) Potensiometer. c) Synchros. d) Resolvers. e) Encoders Optical. f) Encoders Magnetic. g) Encoders induktif. h) Capacitive encoders.
Karena dalam penelitian ini digunakan adalah sensor Encoder Optical atau disebut juga dengan Rotary encoder. Hanya akan dibahas mengenai rotary encoder saja.
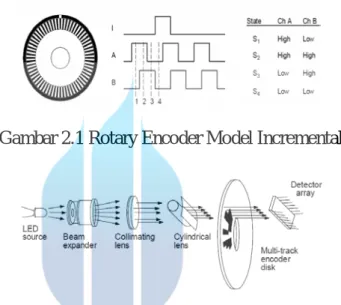
2.1.2. Rotary Encoder
Rotary encoder sebuah perangkat elektronika yang data digunakan untuk mendeteksi perubahan gerak dan posisi atau dapat difungsikan untuk mengubah sinyal analog menjadi sinyal digital. Rotary encoder biasanya terbuat dari piringan yang tipis, dimana ada yang berlubang dan ada juga yang dilapisi dengan warna hitam atau putih. Pada penelitian ini akan digunakan rotary encoder dengan piringan yang berlubang, dimana LED dan photo transistor diletakkan berseberangan sehingga ketika pada posisi berlubang maka cahaya akan dideteksi oleh photo transistor dan sebaliknya. Semakin banyak deretan pulsa yang dikeluarkan dari rotary encoder ini akan menghasilnya data yang mendekati
sempurna sehingga diminta untuk membuat lubang yang banyak pada rotary encoder tersebut.
Pada dasarnya rotary encoder itu terdiri dari 2 yaitu incremental dan absolute. Dimana versi incremental untuk mengukur kecepatan rotasi dan dapat menyimpulkan posisi relatif, sementara model absolute untuk mengukur langsung posisi sudut dan menghitung kecepatan.
Gambar 2.1 Rotary Encoder Model Incremental
Gambar 2.2 Rotary Encoder Model Absolute.
Untuk memperkirakan perubahan posisi dari roda dalam satu putaran penuh dapat dihitung dengan rumus berikut :
( ) = 2∗ ∗ = ∗ ... (1) Setiap perubahan posisi dari robot setiap titiknya dapat dihitung dengan rumus berikut :
= ... (2)
Dimana :
r = jari-jari roda d = diameter roda
Nticks = jumlah pulsa dalam satu putaran roda
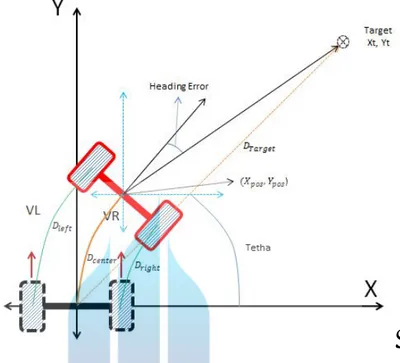
Pada gambar 2.3 menggambarkan arah pergerakan dari robot beroda pada koordinat kartesius menuju target tujuan yang sudah ditentukan.
Gambar 2.3 Arah perubahan posisi robot pada koordinat Kartesius menuju target tujuan
Dari hasil keluaran Rotary Encoder yang terdapat pada roda akan dapat diperoleh nilai perubahan dari robot pada koordinat kartesius. Nilai perubahan itu dapat dilihat pada gambar 2.3 dan untuk berapa nilai dari perubahan itu secara matematis dapat dirumuskan sebagai berikut :
a) Perubahan roda kiri (Dleft)
= ∗ ... (3) b) Perubahan roda kanan (Dright)
= ∗ ℎ ... (4) c) Perubahan posisi robot (Dcenter) dan sudut orientasi (Tetha)
ℎ =
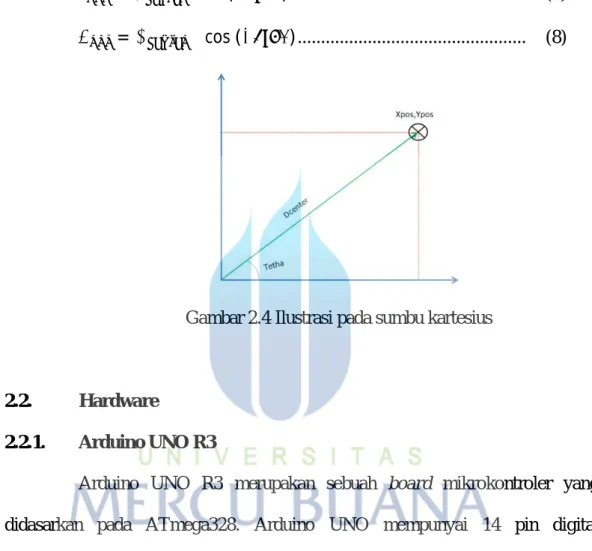
_ ... (6) Dari data diatas kita akan mampu menghitung perubahan posisi robot pada koordinat cartesius (X & Y), sehingga dapat dirumuskan sebagai berikut :
= ∗sin( ℎ ) ... (7) = ∗cos ( ℎ ) ... (8)
Gambar 2.4 Ilustrasi pada sumbu kartesius
2.2. Hardware
2.2.1. Arduino UNO R3
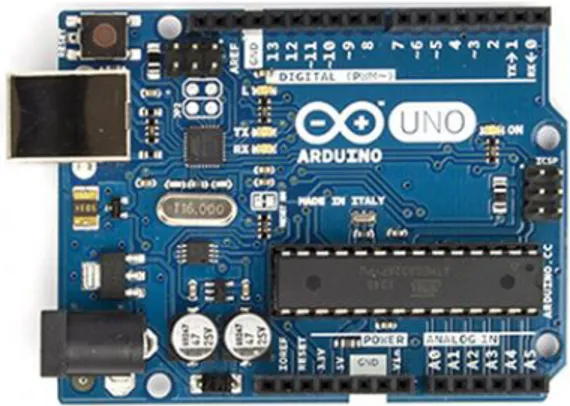
Arduino UNO R3 merupakan sebuah board mikrokontroler yang didasarkan pada ATmega328. Arduino UNO mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino UNO memiliki kemudahan dalam menghubungkannya ke sebuah komputer dengan sebuah kabel USB atau menyuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai.
Gambar 2.5 Arduino UNO R3
Arduino UNO R3 memiliki fitur-fitur baru sebagai berikut:
Pinout 1.0 : ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke depannya, shield akan dijadikan kompatibel/cocok dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya. Sirkuit RESET yang lebih kuat
Atmega 16U2 menggantikan 8U2
Secara detail berikut ini merupakan gambar sedikit mengenai spesifikasi dari Arduino UNO :
Mikrokontroler ATmega328 Tegangan pengoperasian 5V
Tegangan input yang disarankan
Batas tegangan input 6-20V
Jumlah pin I/O digital 14 (6 di antaranya menyediakan keluaran PWM) Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA Arus DC untuk pin 3.3V 50 mA
Memori Flash 32 KB (ATmega328), sekitar 0.5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
2.2.1.1. Power
Arduino dapat diberikan power melalui koneksi USB atau power supply. Powernya diselek secara otomatis. Power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat dikoneksikan dengan mencolok jack adaptor pada koneksi port input supply. Board arduino dapat dioperasikan menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari 7V, kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bias menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 sampai 12 volt.
Penjelasan pada pin power adalah sebagai berikut :
Vin : Tegangan input ke board arduino ketika menggunakan tegangan dari luar (seperti yang disebutkan 5 volt dari koneksi USB atau tegangan yang
diregulasikan). Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan power jack, aksesnya menggunakan pin ini.
5V : Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh USB atau supply regulasi 5V lainnya. 3V3 : Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus
maximumnya adalah 50mA
Pin Ground : berfungsi sebagai jalur ground pada arduino
2.2.1.2. Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM.
2.2.1.3. Input dan Output
Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected oleh default) 20-50 KOhms.
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB FTDI ke TTL chip serial.
Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai. PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi
analogWrite().
SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mensuport komunikasi SPI, yang mana masih mendukung hardware, yang tidak termasuk pada bahasa arduino.
LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin bernilai HIGH, LED hidup, ketika pin bernilai LOW maka LED akan mati.
2.2.1.4. Komunikasi Arduino Uno
Uno Arduino memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lain. ATmega328 ini menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah ATmega16U2 pada saluran board ini komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer. Firmware '16U2 menggunakan USB driver standar COM, dan tidak ada driver eksternal yang dibutuhkan. Namun, pada Windows, file. Inf diperlukan. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data tekstual sederhana yang akan dikirim ke dan dari papan Arduino. RX dan TX LED di papan akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan
koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah perpustakaan SoftwareSerial memungkinkan untuk komunikasi serial pada setiap pin digital Uno itu. ATmega328 ini juga mendukung komunikasi I2C (TWI) dan SPI. Perangkat lunak Arduino termasuk perpustakaan Kawat untuk menyederhanakan penggunaan dari bus I2C, lihat dokumentasi untuk rincian. Untuk komunikasi SPI, menggunakan perpustakaan SPI.
2.2.1.5. Tutorial Bahasa Pemograman Arduino
arduino uno R3 dapat diprogram dengan perangkat lunak ardunio (download). Pilih *Arduino Uno atau ATmega328* dari Tools > menu board sesuai dengan mikrokontroler pada board sesuai dengan tipe Arduino yang dipakai. ATmega168 atau ATmega328 pada Arduino Uno dilengkapi dengan bootloader yang memungkinkan untuk meng-upload kode baru tanpa menggunakan programmer hardware eksternal
2.2.1.6. Arduino Software
Arduino Uno R3 dirancang dengan cara yang memungkinkan untuk diatur ulang oleh perangkat lunak yang berjalan pada komputer yang saling terhubung. perangkat lunak Arduino memungkinkan kita untuk meng-upload kode dengan hanya menekan tombol upload pada menu prompt pada programmer Arduino. ini berarti bahwa bootloader dapat memiliki waktu yang pendek untuk meng-upload data atau program. Seperti telah dijelaskan sebelumnya bahwa Pemograman Arduino dibangun dengan bahasa C yang sudah disederhanakan sehingga lebih mudah dalam pemogramannya
dalam Arduino Software, terdapat text editor untuk membaca kode, pesan area, toolbat yang berisi fungsi perintah dan beberapa menu lainnya. dengan ini, kita dapat berkomunikasi dengan hardware dan meng-upload program untuk meng-upload program, hanya perlu dengan satu kali tekan tombol upload. status area akan memberikan informasi umpan balik dari program dan error yang terjadi.
2.2.1.7. USB Perlindungan
Arduino Uno R3 memiliki polyfuse reset yang melindungi port USB Komputer dari hubung singkat dan arus lebih. Meskipun kebanyakan komputer memberikan perlindungan internal sendiri, sekring memberikan perlindungan tambahan. jika lebih dari 500 mA diterapkan ke port USB, Sekring otomatis akan memutuskan sambungan sampai hubung singkat atau arus lebih ditiadakan.
2.2.2. Driver Motor (L298 Motor Shield)
Modul L298P ini merupakan Motor Shield yang difungsikan untuk menggerakkan 2 buah motor DC yang bertegangan DC 7-12 Volt dengan arus maksimum 2 Ampere. Produk ini sangat kompatibel untuk modul Arduino UNO, Arduino Mega, maupun Board Arduino yang kompatibel lainnya. Motor Shield ini digunakan untuk menggantikan rangkaian Transistor H-Brige karena H-Bridge itu memiliki rangkaian yang sangat rumit.
Dengan menggunakan IC driver ini ada beberapa keuntungan yang bisa didapat. Keuntungannya adalah :
a. Berukuran kompak sehingga lebih praktis b. Bisa mengatur arah putar motor DC
c. Bisa mengatur kecepatan motor DC
Gambar 2.6 Modul Driver Motor DC
Untuk lebih detail spesifikasi dari peralatan berikut dapat dilihat di bawah berikut ini:
Logic Control Voltage 5V (From Arduino)
Motor Driven Voltage 6.5~12v(VIN Power Supply),4.8~35V (External Power Source)
2 way motor drive
Logic supply current Iss 36mA Motor Driven current Io 2A
Maximum power consumption?25W?T=75?? Up to 2A current each way
Pin 4,5,6,7 are used to drive two DC motor Support PWM speed control
Support PLL advance speed control Size: 55x55mm
Compatibility a. Arduino UNO b. Arduino UNO R3
c. Arduino Mega 1280/2560
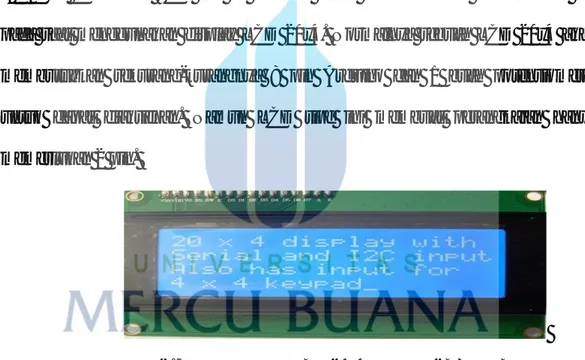
2.2.3. I2C Liquid Crystal Displays (LCD) 20x4
LCD (Lequid Crystal Displays) 20x4 ini dapat digunakan untuk menampilkan karakater sebanyak 80 karakter. LCD banyak digunakan pada peralatan elektronika yang harus menampilkan data-data yang ingin dilihat dari peralatan tersebut.
Pada penelitian ini akan menggunakan LCD yang dirangkaikan dengan I2C/TWI Connector. LCD tipe ini didesain untuk meminimalkan penggunaaan pin pada saat menggunakan display LCD 20x4. Normalnya sebuah LCD 20x4 akan membutuhkan sekurang-kurangnya 8 pin Arduino dan 1 buah potensiometer untuk dapat diaktifkan. Namun LCD tipe ini membuat perangkaian hanya memerlukan 2 pin.
Gambar 2.7 Tampil depan LCD 20x4 dengan I2C/TWI Connector
Spesifikasi
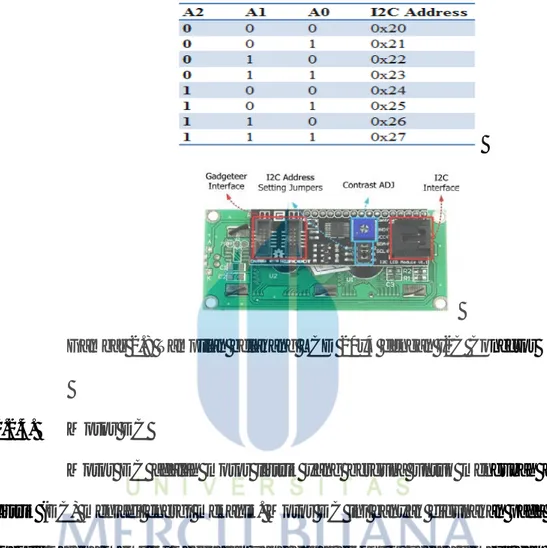
I2C Address: 0x27
Backlight (Blue with white char color)
Supply voltage: 5V
Size:82x35x18 mm
Untuk mengubah address I2C, maka pindahkan jumper dengan mengacu pada tabel berikut (0 berarti jumper terhubung, 1 berarti jumper dilepas):
Tabel 2.1 Pin-pin dari I2C dengan LCD 20x4
Gambar 2.8 Tampilan belakang LCD 20x4 dengan I2C Conector
2.2.4. Motor DC
Motor DC adalah motor listrik yang berguna untuk mengubah energi listrik (DC) menjadi energi mekanik. Motor DC ini banyak digunakan pada dunia robotic karena memiliki kecepatan yang dapat dikontrol secara lembut dan untuk arah putaran dapat diubah berlawanan. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
2.2.5. Baterai
Baterai merupakan salah satu untuk membangun robot yang bergerak bebas, karena alat yang satu ini merupakan sumber tegangan DC. Alat ini berfungsi untuk menyimpan energi listrik dari bentuk energi kimia.
Untuk membangun baterai diperlukan salah satunya elektrolit asam sulfat, elektroda positif dan negatif dalam bentuk plat.
Gambar 2.10 Baterai Antel 1200 (1,2 Volt 1200 mAh)
2.2.6. Project Board
Project Board atau dikenal juga dengan Breadboard ini sangat banyak dipergunakan dalam penelitian untuk merancang suatu rangkaian elektronika. Dalam melakukan penelitian sebelumnya banyak menggunakan penyolderan, akibatnya harus membutuhkan banyak komponen dikarenakan waktu melakukan penyolderan akan mengurangi kemampuan dari komponen yang sudah dipakai sebelum. Dengan peralatan ini pemasangan komponen dengan penyolderan dapat dikurangi sehingga membuat penelitian menjadi lebih mudah dan murah.