PERANCANGAN DAN PEMBUATAN SISTEM KENDALI
MESIN JIG BORING 2 ½ D BERBASIS PC - LABVIEW
FARIZ MAULANA
M. ADRIOVANI
TAUFIK DINURIANSYAH
WILLIAM DJOHAR
Jurusan Teknik Otomasi Manufaktur dan Mekatronika Politeknik Manufaktur Negeri Bandung
Jl. Kanayakan 21 Bandung, Indonesia
ABSTRAK
Pada karya tulis ini disajikan mengenai pembuatan perangkat lunak / program penggerak mesin Jig Boring 2 ½ D. Software ini menggunakan visual programming agar lebih mudah digunakan oleh user. Bentuk visual programming yang dibuat berupa sasaran koordinat yang dikehendaki untuk pergerakan mesin, yaitu maju, mundur, kanan dan kiri, hingga naik dan turun. Pergerakan mesin yang dapat dilakukan adalah secara berurut sesuai dengan urutan data koordinat yang dimasukan oleh pengguna program ini. Oleh karena itu, penulis memberi nama “Diagram Block Programming Language”.
Apabila pengguna / user telah memasukan koordinat sasaran pada program ini, user dapat mengeksekusi koordinat-koordinat yang telah ditentukan sebelumnya. Perintah-perintah untuk mengeksekusi koordinat tersebut akan dikirimkan melalui arduino (sebagai modul I/O) dan akan diteruskan ke penggerak / driver. Sehingga Mesin Jig Boring 2 ½ D akan melakukan pengeboran sesuai dengan koordinat yang ditentukan oleh pengguna (batas bidang kerja dengan ukuran A4).
Dengan menggunakan arduino UNO sebagai modul IO, hasil kerja mesin Jig Boring 2 ½ D masih belum presisi 100%. Dimana tingkat kepresisian dalam pengendalian motor DC (spindle dan sumbu Z) sebesar 95,69% dan untuk motor stepper (sumbu X dan Y) sebesar 98,74%. Waktu yang dibutuhkan untuk pergerakan motor stepper masih belum maksimal (untuk 1 cm membutuhkan waktu kurang lebih 30 detik).
Berdasarkan hasil yang demikian mesin Jig Boring 2 ½ D berbasikan PC-Labview dengan arduino UNO sebagai modul IO masih belum mencapai performa terbaik.
Kata Kunci : labview, driver, jig boring
1. Pendahuluan
Pengerjaan proyek akhir untuk jurusan Teknik Otomasi Manufaktur dan Mekatronika pada tahun ajaran 2012 / 2013 bertemakan “Perancangan dan Pembuatan Kendali Mesin Jig Boring 2 ½ D”. Untuk pengendalian Mesin Jig Boring 2 ½ D ini dibagi menjadi 3, yaitu berbasis microcontroller, PLC (Programmable Logic Controller), dan PC (Personal Computer).
Mesin Jig Boring 2 ½ D merupakan suatu mesin perkakas yang bertujuan unttuk mempermudah pengerjaan manusia (operator) dalam proses boring, drilling, dan juga counter-sinking dengan hasil yang presisi dan akurat.
Untuk mendapatkan hasil yang presisi dan juga akurat, maka dari itu dibutuhkannya sebuah sistem kendali untuk memastikan bahwa gerakan aktuator sesuai dengan harapan (parameter) yang ditentukan oleh operator. Sistem kendali yang
diterapkan pada mesin Jig Boring 2 ½ D ini menggunakan rangkaian tertutup (Closed Loop Circuit), dimana variabel keluaran (Process Variable / PV) yang akan dibandingkan dengan parameter-parameter yang telah dimasukan sebelumnya (Set Point / SP) oleh operator dan hasil dari perbandingan tersebut akan didapat variabel kesalahan (Error) yang akan menjadi acuan untuk perububahan variabel keluaran menjadi sama dengan yang diharapkan.
digunakan bukanlah teks terstruktur atau juga object oriented seperti halnya pascal, C, C++,Visual Basic dan lain-lain, melainkan pemograman grafis / G-Code dimana wujud pemogramannya berupa aliran data atau biasa dikenal dengan istilah diagram blok.
2. Sistematika Penulisan Laporan
Untuk mempermudah pembahasan dan pemahaman materi atau pokok bahasan dari karya tulis ini, maka penulis menyajikan sistematika pembahasan karya tulis ini sebagai berikut:
BAB I PENDAHULUAN
Berisi uraian mengenai latar belakang, tujuan, metodologi pengerjaan, dan sistematika penulisan laporan dari Proyek Akhir yang sedang dikerjakan. BAB II LANDASAN TEORI
Berisi teori-teori yang melandasi perancangan dan juga pembuatan proyek akhir / kendali mesin Jig Boring 2 ½ D.
BAB III PERANCANGAN KENDALI
Berisi tentang rancangan / konsep akan pembuatan proyek akhir / Kendali Mesin Jig Boring 2 ½ D.
BAB IV ANALISA
Berisi mengenai pengujian rangkaian terhadap hasil kendali yang sudah penulis rancang sebelumnya.
BAB V KESIMPULAN DAN SARAN
Berisi kesimpulan dan saran dari seluruh aktivitas pengerjaan proyek akhir yang telah dilakukan.
3. Perancangan Sistem Kendali
Pada bab ini akan dibahas mengenai rancangan / konsep akan pembuatan proyek akhir / Kendali Mesin Jig Boring 2 ½ D.
Dengan demikian untuk mengoperasikan mesin Jig Boring 2 ½ D baik secara manual maupun otomatis dibutuhkan bagian bagian pendukung yang akan digambarkan pada blok diagram berikut.
Gambar Perancangan Sistem Kendali-1 Blok Diagram Pengorprasian Mesin Jig Boring
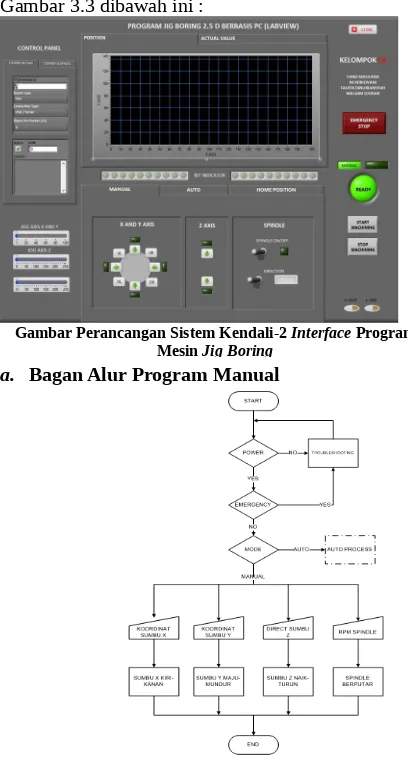
Program Jig Boring berbasis PC dengan menggunakan software pemrograman LabVIEW ini penulis rancang dengan membagi 2 bagian utama interface yaitu bagian kendali dan bagian indikator. Pada bagian indikator terdapat grafik posisi, boring point, dan step response, serta terdapat indikator pergerakan eksitasi pada motor 5 fasa (pentagon) pada setiap step pulsa yang diberikan, juga terdapat indikator posisi sumbu X, Y, dan Z. Lihat pada Gambar 3.3 dibawah ini :
a. Bagan Alur Program Manual
Gambar Perancangan Sistem Kendali-2 Interface Program Mesin Jig Boring
Gambar Perancangan Sistem Kendali-3 Flow Chart Program Manual
Y
Z
X
Dimensions:X = 380 mm Y = 500 mm Z = 216 mm
Motor DC Sumbu
Z Motor
DC Spind
el Motor Stepper Sumbu
Y
Motor Stepper Sumbu
b. Bagan Alur Program Otomatis
c. Gabungan Hasil Perancangan
Berdasarkan hasil penilaian media-media yang dibutuhkan maka dapat disusun rancangan sebagai berikut:
Gambar Perancangan Sistem Kendali-5 Blok Diagram Perancangan
Pada gabungan perancangan sistem beberapa jenis komponen telah ditentukan dari hasil penilaian komponen yaitu untuk media kerja menggunakan Motor Seelfeeder dan Motor Tapper, media gerak menggunakan pneumatik dengan media kontrolnya PLC. Untuk menentukan posisi silinder menggunakan reed switch dan pendeteksi benda kerja menggunakan proximity switch.
d. Skematik Driver Motor DC
Menurut fungsi kerjanya, driver motor DC pada mesin ini berfungsi sebagai penggerak sumbu Z dan sebagai pemutar spindel bor. Dengan menggunakan IC L298 sebagai driver.
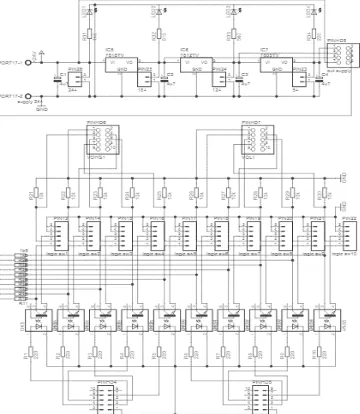
e. Skematik Driver Motor Stepper
Pada pembuatan driver motor ini mengendalikan sebuah motor stepper jenis pentagon 5 fasa. Motor stepper ini bergerak dengan langkah 0,72° (full step) atau 0,36° (half step) per step dan terdapat 10 buah data sebagai pengendali dari arah pergerakan motor. Motor akan bergerak searah jarum jam jika data bergeser dari data 0 ke data 9, dan begitu pula sebaliknya motor akan bergerak berlawanan arah jarum jam ketika data bergerak dari arah data 9 ke data 0 sesuai dengan table kebenaran. Driverstepper ini menggunakan 10 MOSFET (Metal Oxide Semiconductor – Field Effect Transistor) IRFZ44N, dimana 5 MOSFET menentukan kumparan motor dengan tegangan yang mengalir ke kumparan motor, sedangkan 5 MOSET lainnya menetukan tegangan pada kumparan motor yang mengalir ke ground.
f. Skematik Rangkaian Optocoupler
Untuk pencegahan adanya arus balik dari rangkaian aktuator ke rangkaian kendali, maka penulis juga merancang rangkaian pencegah yang menggunakan IC optocoupler 4N35.
Gambar Perancangan Sistem Kendali-4 Flow Chart Program Otomatis
Gambar Perancangan Sistem Kendali-6 Skematik Rangkaian Motor DC
4. Analisa dan Perhitungan
a. Perhitungan PWM Menjadi Tegangan Analog
Dimana ;
Error =Selisih / penyimpangan nilai antara aktual dengan perhitungan.
Data Aktual =Data yang didapat dari pengukuran dengan menggunakan multimeter (rata-rata).
Data Perhitungan = Data yang didapat dengaan menggunakan perhitungan PWM (rata-rata).
Keakuratan =Nilai persentase keakuratan proses.
Berdasarkan persamaan diatas, maka didapat nilai keakuratan dalam pengendalian motor DC sebesar 95,25 %, dengan perhitungan sebagai berikut :
Data Aktual (rata-rata) = (0,3 V + 3,3 V + 8,5 V + 12,6 V + 15,3 V + 17,1 V + 18,5 V + 19,6 V + 20,4 V + 22,1 V) / 10 = 13,77 V
Data Perhitungan (rata-rata) = (2,4 V + 4,8 V + 7,2 V +
9,6 V + 12 V + 14,4 V + 16,8 V + 19,2 V + 21,6 V + 24 V) / 10
= 13,2 V
Error = Data Aktual – Data Perhitungan = 13,77 – 13,2 = 0,57
b. Analisa Keakuratan Pengendalian Motor DC
Perbedaan nilai antara perhitungan dengan aktual terjadi karena pada proses perhitungan, semua kondisi (faktor mekanik, elektromangentik, dsb.) ditiadakan atau dianggap ideal. Sedangkan aktualnya ada faktor-faktor tersebut yang menyebabkan penyimpangan nilai dari yang diharapkan
.
c. Perhitungan Jumlah Pulsa Menjadi Perpindahan Jarak
Dimana ;
Error = Selisih / penyimpangan nilai antara aktual dengan perhitungan
Data Aktual = Data yang didapat dari pengukuran dengan menggunakan penggaris
Data Perhitungan = Data yang didapat dengan mengatur jarak perpindahan
Keakuratan = Nilai persentase keakuratan proses
Berdasarkan persamaan diatas, maka didapat nilai keakuratan dalam pengendalian motor stepper sebesar 99,24 %, dengan perhitungan sebagai berikut:
Data Aktual (rata-rata) = (15 mm + 20 mm + 31 mm + 41 mm + 53 mm) / 5 = 32 m
Data Perhitungan (rata-rata) = (10 mm + 20 mm + 30 mm + 40 mm + 50 mm) / 5 = 30 mm
Error = Data Aktual – Data Perhitungan = 32 – 30
= 2
d. Analisa Keakuratan Pengandalian Motor
Stepper
Perbedaan nilai antara perhitungan dengan aktual terjadi karena pada proses perhitungan, semua kondisi (faktor mekanik, clock bit, dsb.) ditiadakan atau dianggap ideal. Sedangkan aktualnya ada faktor-faktor tersebut yang menyebabkan penyimpangan nilai dari yang diharapkan
e. Perhitungan Pergerakan Interpolasi
Untuk hasil pengujian yang telah penulis lakukan terhadap gerakan interpolasi motor stepper (sumbu X dan Y). Metode yang penulis gunakan untuk menggerakan motor stepper yaitu dengan menggeser bit-bit array yang dikendalikan oleh waktu (delay lakukan berdasarkan tujuan-tujuan yang penulis harapkan (tertulis pada bab I) dalam pengerjaan sistem kendali mesin Jig Boring 2 ½ D, hanya dua yang terlaksana dari tiga hal yang penulis harapkan dalam pengendalian mesin Jig Boring 2 ½ D. Dua hal tersebut adalah :
1. Mampu mengendalikan pergerakan motor stepper (sumbu X dan Y) secara simultan / interpolasi. Dimana pergerakan interpolasi dapat terlihat pada mode otomatis, motor stepper sumbu X dan Y bergerak secara bersamaan hingga titik target dengan waktu tempuh yang dibutuhkan sama.
2. Mampu membuat tampilan program yang interaktif dan mudah untuk digunakan. Dengan adanya panel kendali (tombol-tombol untuk menggerkan plant) dan indikator (tampilan-tampilan yang mengindikasikan pergerakan plant) membuat program kendali mesin Jig Boring 2 ½ D menjadi interaktif bagi pengguna / user. Pada Mode manual hanya terdapat tombol-tombol yang menggerakan aktuator yang dikemas secara menarik dan mudah untuk dipahami. Lalu pada mode otomatis untuk proses pengerjaan, pengguna hanya perlu menentukan koordinat-koordinat yang
ingin diproses dalam bentuk angka dengan satuan jarak (milimeter).
Namun masih ada satu hal yang belum tercapai dalam pengendalian aktuator pada mesin Jig Boring 2 ½ D yaitu pengendalian kecepatan putar motor DC dengan menggunakan PID. Rotary encoder digunakan sebagai pemberi sinyal balik / feedback terhadap sistem, dimana berperan sebagai pengukur nilai aktual (process variable) dalam bentuk pulsa yang terkonversi menjadi kecepatan putar dan jarak perpindahan, lalu sinyal tersebut akan dibandingkan dengan nilai yang sudah ditentukan sebelumnya / diharapkan (set point).
b. Saran
Untuk mendapatkan hasil yang lebih baik, beberapa saran yang dapat dijadikan bahan pertimbangan untuk pengembangan baik program maupun driver motor yang digunakan pada “Mesin Jig Boring 2 ½ D” selanjutnya :
1. Driver yang digunakan untuk motor 5 fasa saat ini hanya mampu menggerakan motor stepperuntuk 1 cm butuh waktu kurang lebih 15 sekon. Sehingga untuk pengembangan driverstepper yang digunakan dapat memanfaatkan karakteristik motor stepper (start stop region / slew region) untuk mendapatkan kecepatan yang maksimum, atau juga dapat mengembangkannya clock yang terdapat pada modul IO (arduino) sehingga clock yang dihasilkan untuk menggeser bit-bit motor stepper lebih cepat. 2. Untuk program sebagai pengendali mesin
Jig Boring 2 ½ D secara fungsionalitas sudah dapat dikatakan optimal, namun dari segi keamanan sistem dan indikasi-indikasi penunjang masih perlu ditambahkan, demi kemudahan dalam penggunaannya ataupun dalam troubleshooting.
6. Daftar Pustaka
http://depokinstruments.com/2012/08/09/teori-motor-dc-bersikat-brushed-dc-motor-theory/ Diunduh pada 10 July 2013, 21.39 WIB
Satrnoko, Ari. 2008. FENOMENA BOUNCING PADA PROGRAMMABLE LOGIC CONTROLLER (PLC) UNTUK MENGENDALIKAN GERAKAN MOTOR STEPPER 5 PHASE. Yogyakarta: Pusat Teknologi Akselerator dan Proses Bahan