BAB III
METODOLOGI PENELITIAN
3.1 Objek Penelitian
Objek penelitian ini adalah wahana terbang quadcopter dengan desain spesifikasi mekanik sebagai berikut :
a) Gambar
Gambar 3.1 Bentuk fisik Quadcopter
Spesifikasi perangkat elektronik pada Quadcopter yang akan digunakan dalam penelitian ini adalah sebagai berikut:
1) Frame X525
2) Motor Brushless Racerstar KV(rpm/V) :
Voltage : 3,7V-7,4V Load current : 3,1A 3) Propeller ( 6 x 3 x 3V1S)
4) ESC Racerstar MS 35A BLHeLi_S Dshot 600
Cont.Burst : 35A/45A Weight : 7g
Size(mm) : 14x27x5,5
Studi Literature
Perancangan System
Perakitan Alat
Pengujian System
Analisis Perilaku System
Penyusunan Lapoaran Akhir b) Dimensi
Quadcopter yang akan diteliti memiliki ukuran atau dimensi sebagai berikut panjang 73cm, lebar 73cm, tinggi 18cm.
c) Bobot
Setelah melakukan proses menimbang, quadcopter memiliki berat atau bobot
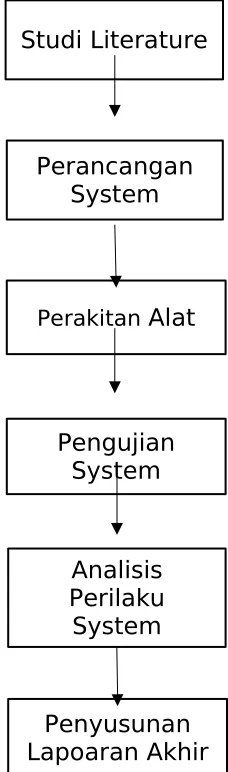
3.2 Prosedur Penelitian
Tahapan prosedur yang dilakukan dalam penelitian ini dapat dijelaskan pada gambar 3.1.
Detail tahapan proposal penelitian ini adalah sebagai berikut :
1. Studi Literatur
Pada tahapan ini akan dilakukan pengkajian untuk kebutuhan penelitian. Adapun kajian yang dibutuhkan adalah sebagai berikut:
a). Kajaian umum tentang wahana terbang quadcopter b). Raspberry P B+
c). Konsep tentang kerja DC Brushless. d). Teori tentang mekanisme servo.
e). Sensor HC-SR04 atau sensor ultrasonic. f). Logika Fuzzy.
2. Perancangan Sistem Kendali Wahana Terbang Quadcopter.
Perancangan Sistem untuk keperluan penelitian ini adalah perancangan sistem elektrik dan sisitem kendali. Sistem elektrik dirancang untuk mengolah sinyal masukkan sensor jarak dan sinyal tegangan PWM untuk pengendalian kecepatan propeler. Sedangakan sistem kendali untuk mengatur pergerakkan quadcopter untuk menghindari rintangan dengan optimal. Tahapan perancangan penelitian sistem kendali pada penelitian ini terdapat beberapa tahapan diantaranya:
a). Menentukan sistem fisik dan spesifikasinya. b). Mendisan blok diagram sistem.
c). Mengubah dari sistem fisik menjad skematik.
d). Membuat flow chart diagram sesuai dengan skematik.
e). Mengevaluasi blok diagram berdasarkan rangakaian skematik. f). Menguji kinerja perangakat sistem kendali.
3. Perakitan Wahana Terbang Quadcopter.
4. Pengujian System
Pada tahapan ini dilakukan beberapa proses pengujian sistem. Pengujian sistem elektronik dilakukan pada pengujian perputaran gerak motor DC, pembangkitan sinyal PWM di ESC, pengaturan arah gerak putar motor, pulsa masukan dan keluaran digital pada raspberry, pulsa keluarkan sensor gerak rotasi dan kesesuaian logika pemrogroman terhadap algoritma PID.
5. Analisis Prilaku Sistem Quadcopter
Pada tahapan ini mengacu pada keberhasilan sistem kendali dalam mengatur prilaku bergerak maju, mundur, belok kanan maupun belok kiri. Quadcopter bergerak maju berdasarkan hasil tanggapan sistem kendali, tanggapan waktu dan peralihan.
6. Penyusunan Laporan Akhir
Penyusunan laporan akhir ini dibuat berdasarkan sistematika penulisan yang telah ditentukan. Sistematika penulisan yang akan digunakan pada tugas akhir ini adalah sebagai berikut:
a). Pendahuluan b). Tinjauan Pustaka c). Metodelogi Penelitian d). Pembahasan
e). Saran dan Kesimpulan f). Daftar Pustaka
3.3 Alat Dan Bahan
Alat dan bahan yang diperlukan dalam penelitian ini adalah sebagai berikut : 1. Alat yang digunakan untuk menunjang pada penelitian ini adalah :
PC
Solder
Obeng
Software phyton
Wifi Router
2. Bahan yang diperlukan dalam penelitian ini adalah;
Frame
Kabel
Motor Brushless
Propeller
ECS ( Electronic Speed Controller )
Battery Lippo
Sensor HR-SC04
Raspberry Pi 3 model B
Power Distribution Board
3.4 Teknik Analisis Data
untuk memenuhi spesifikasi. Tahapan yang perlu dibahas dalam analisis sistem kendali ini terdiri dari beberapa aspek yaitu :
1. Analisis waktu alih
Analisis waktu alih atau tanggapan sistem adalah perubahan perilaku output, terhadap perubahan sinyal input. re
1) Tanggapan Waktu
Secara garis besar fase penerbangan gerakan longitudinal pada quadcopter dibagi dalam 3 fase utama, yaitu take off (tinggal landas), hovering (melayang) , dan landing (pendaratan). Dari ketiga fase proses tersebut, quadcopter harus mampu bergerak baik dan tepat. Pada proses ini sangat dibutuhkan untuk menghindari kecelakaan atau benturan terhadap objek penghalang maupun landasan. Secara umum spesifikasi kinerja respon waktu dapat dibagi atas dua tahapan pengamatan, yaitu: A. Respon Transient
Respon transient merupakan spesifikasi respon sistem yang diamati mulai saat terjadinya perubahan sinyal input external maupun internal sampai respon masuk dalam keadaan steady state. Tolak ukur yang digunakan untuk mengukur kualiatas respon transient ini antara lain: a. Delay Time (Waktu Tunda)
Waktu Tunda merupakan waktu yang diperlukan agar tanggapan mencapai 50% nilai akhir pertama kali.
a. Rise time (waktu naik)
Waktu naik adalah ukuran waktu yang di ukur mulai dari respon t= 0 sampai dengan respon memotong sumbu steady state yang pertama. Besarnya nilai waktu naik dinyatakan pada persamaan berikut:
c. Peak Time (waktu puncak)
d. Settling Time
Settling time merupakan ukuran waktu yang menyatakan respon telah masuk 5% atau 0,5% dari respon steady state.
B. Respon Steady State
Respon steady state adalah respon sistem yang diamati mulai saat masuk dalam keadaan steady state sampai waktu tak terbatas.
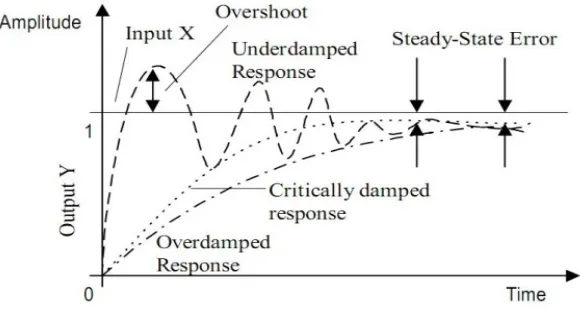
a. Overshoot
Maksimum (persen) overshoot (Mp) : adalah nilai puncak kurva tanggapan diukur dari satuan. Apabila nilai akhir keadaan tunak tanggapannya jauh dari satu, maka biasa digunakan persen overshoot maksimum
c. Underdamped
underdamped merupakan suatu keadaan output melesat naik untuk mencapai input kemudian turun dari nilai yang kemudian berhenti pada kisaran nilai input. Respon ini memiliki efek osilasi
d. Overdamped
Overdamped merupakan suatu keadaan respon yang dapat mencapai nilai input dengan cepat dan tidak melewati batas input.
e. Criticallydamped
Gambar 3.3Tanggapan Peralihan
2. Analisis Galat Keadaan Tunak
Bila keadaan dari keluaran tidak sama dengan masukkannya, berarti terdapat kesalahan keadaan tunak (steady-state error). Kita dapat mengambil contoh dari kehidupan sehari-hari, yaitu pada saat proses lift berhenti disetiap lantai bertingkat. Lift harus mampu untuk berhenti sejajar pada setiap lantai bertingkat. Dapat dibayangkan jika lift tidak mampu berhenti sejajar dengan permukaan lantai. Lift yang tidak mampu berhenti sejajar dengan permukaan lantai, Pintu lift bisa saja tidak dapat terbuka maksimal.
3. Analisis Kepekaan (sensitivitas )
Analisi kepekaan atau sensitivitas merupakan analisis yang dilakukan untuk mengetahui akibat dari perubahan sinyal-sinyal eksternal. Dengan melakukan analisis kepekaan maka akibat yang mungkin terjadi dari perubahan-perubahan sinyal tersebut dapat diketahui dan diantisipasi. 4. Analisa kestabilan sistem
kesetimbangan atau keluaran berada dalam keadaan yang tetap walaupun sistem tiba-tiba diberi adanya gangguan atau masukkan baru. Sistem kendali dengan parameter konstan akan berubah menjadi tidak stabil, bila keluara sistem berosilasi secara terus menerus atau membesar tanpa batas dari kondisi kesetimbanganya manakala dikenali suatu gangguan.
Salah satu penerapannya yaitu menghindari rintangan pada quadcopter. Pada khasus penalaran menghindari rintangan, kestabilan sistem diperlukan untuk menjaga quadcopter teteap stabil pada proses menentukan arah gerak maju atau mundur. Untuk memudahkan analisis, ada beberapa sinyal-sinyal uji yaitu;
a. Sinyal Step
Pada proses ini quadcopter dimasukkan sinyal gangguan yang muncul secara tiba-tiba.
b. Sinyal Ramp
Pada proses ini quadcopter dimasukkan sinyal berubah bertahap terhadap waktu
c. Sinyal Implus