TWO BODIES PROBLEM (PART 1)
(Newtonian Gravitational Approach)
Drs. Atman P.
Transformasi Koordinat
Kedudukan sebuah titik P dalam ruang Cartesian dinyatakan sebagai pasangan bilangan (x,y,z) dimana x = jarak antara proyeksi titik P pada sumbu X terhadap titik acuan O(0,0,0), y = jarak antara proyeksi titik P pada sumbu Y terhadap titik acuan O(0,0,0) dan z = jarak antara proyeksi titik P pada sumbu Z terhadap titik acuan O(0,0,0). Kedudukan titik P dalam ruang Cartesian dapat dinyatakan sebagai vektor r yang diperikan sebagai kombinasi linier vektor basis ex, ey dan ez
OP = (x,y,z) = r = x ex + y ey + z ez (01)
dimana ex = (1,0,0), ey = (0,1,0) dan ez = (0,0,1). Jarak OP dengan demikian dapat dinyatakan sebagai produk skalar r
r = |OP| = (r.r)1/2 = ((x ex + y ey + z ez).( x ex + y ey + z ez))1/2 = (x2 + y2 + z2)1/2 (02)
dan jarak antara dua titik P(x,y,z) dan Q(x + dx, y + dy, z + dz) yang berdekatan infinitesimal dinyatakan sebagai
|PQ| = (((x–(x+dx))ex +(y–(y+dy))ey +(z–(z+dz))ez).((x–(x+dx))ex +(y–(y+dy))ey +(z–(z+dz))ez))1/2 |PQ| = (((dx)ex +(dy)ey +(dz)ez).((dx)ex +(dy)ey +(dz)ez))1/2
|PQ| = ((dx)2+(dy)2 +(dz)2)1/2 (03)
Menggunakan relasi trigonometri biasa dari gambar – 1 diatas kita dapatkan bahwa x = r cos cos
y = r sin cos
dimana adalah sudut yang diapit oleh garis proyeksi titik P pada sumbu X terhadap garis proyeksi garis OP pada bidang XY dan adalah sudut yang diapit oleh garis proyeksi titik P pada bidang XY terhadap garis OP dan r memenuhi (02). Selanjutnya dua titik terletak berdekatan secara infinitesimal (03) dinyatakan dalam (04) memberikan
|PQ| = ((dx)2+(dy)2 +(dz)2)1/2
|PQ| = ((dr cos cos – r sin cos d – r cos sin d)2 + (dr sin cos + r cos cos d – r sin sin d)2 + (dr sin + r cos d)2)1/2
|PQ| = (dr)2 + r2 cos2 (d)2 + r2 (d)2 (05)
Untuk selanjutnya kita akan lebih banyak menggunakan koordinat pada bidang Cartesian XY ketimbang koordinat ruang Cartesian XYZ mengingat nanti akan kita buktikan bahwa semua gerak dibawah pengaruh gaya sentral terletak pada sebuah bidang. Dengan demikian maka kedudukan sebuah titik pada bidang XY dapat diperikan sebagai kombinasi linier vektor basis ex, dan ey sehingga
OP = (x,y,z) = r = x ex + y ey (06)
dimana ex = (1,0) dan ey = (0,1) dan jarak OP dengan demikian dapat dinyatakan sebagai produk skalar r
r = |OP| = (r.r)1/2 = ((x ex + y ey).( x ex + y ey))1/2 = (x2 + y2)1/2 (07) dan jarak antara dua titik P(x,y) dan Q(x + dx, y + dy) yang berdekatan infinitesimal dinyatakan sebagai
dan persamaan (06) dapat dinyatakan dalam (09) sebagai
OP = (x,y,z) = r = r cos ex + r sin ey = r (cos ex + sin ey) (10) Karena ex dan ey adalah vektor basis dalam sistem koordinat Cartesian maka kita dapat mendefinisikan vektor basis er dalam arah radial yang merupakan kombinasi linier dari vektor basis ex dan ey
sehingga (10) dapat dinyatakan sebagai
r = r er (12)
yang merupakan representasi vektor r dalam sistem koordinat Polar. Dalam sistem koordinat Polar kedudukan sebuah titik P dapat dinyatakan sebagai kombinasi (r,) dimana r adalah jarak antara titik P terhadap titik acuan dan adalah sudut yang diapit oleh garis r dan sumbu X.
Karena sistem koordinat Polar adalah sistem koordinat pada bidang maka diperlukan dua buah vektor basis, dengan demikian kita masih perlu mendefinisikan satu vektor basis lagi yang merepresentasikan sudut . Untuk itu kita lakukan diferensiasi kembali terhadap (12) dan dengan menggunakan (09) dan (11) akan diperoleh
yang selanjutnya kita definisikan sebagai vektor basis dalam arah tangensial. Perhatikan bahwa dalam mendefinisikan kedudukan suatu titik P dalam sistem koordinat Polar (12) ternyata tidak memerlukan vektor basis tangensial (14) karena relasi
de = – er d
der = e d (15)
Jika dr kita nyatakan sebagai kecepatan dengan dr sebagai komponen kecepatan radial dan sebagai r d komponen kecepatan tangensial maka selanjutnya kita dapat mendefinisikan percepatan menggunakan hasil (12), (13), (14) dan (15) sebagai
d2r = d(dr) = d(dr er + r d e) = d2r er + dr der + dr de + r d2e + r d de
d2r = d2r er + dr(e d) + dr de + r d2e – r d (er d)
d2r = (d2r – r dd) er + (2dr d + r d2) e (16)
dimana komponen (d2r – r dd) disebut sebagai percepatan radial dan (2dr d + r d2) sebagai komponen percepatan tangensial. Hingga saat ini kita sudah memiliki
r = r er
dr = dr er + r d e
d2r = (d2r – r dd) er + (2dr d + r d2) e (17)
Produk Skalar dan Vektor dalam sistem koordinat Polar
Menggunakan hasil – hasil (12), (13), (14), (15) dan (16) kita dapat melakukan perkalian skalar (produk skalar), perkalian vektor (produk vektor) dalam sistem koordinat Polar. Produk skalar dari
dr terhadap dr
dr
.
dr = (dr er + r d e).
(dr er + r d e) = (dr)2 + r2 (d)2 (18)karena sistem koordinat Polar adalah sistem koordinat ortogonal yaitu semua vektor basisnya tegak lurus satu sama lain. Kemudian perkalian vektor antara r terhadap dr yaitu
rdr = (r er) (dr er + r d e)
Jika kita definisikan vektor momentum angular L sebagai perkalian vektor antara vektor kedudukan r dan vektor momentum p
L≡rp = rdr = rdr = r2 dez (21)
maka komponen vektor momentum angular pada arah radial Lr dan tangensial L adalah nol dan satu – satunya komponen tak nol adalah pada arah tegak lurus bidang XY yaitu Lz. Selanjutnya jika kita definisikan energi kinetik non relativistik benda sebagai kuadrat momentum benda
E = (2m)–1p
.
p = ½ m dr.
dr = ½ m ((dr)2 + r2 (d)2) = ½ m (dr)2 + ½ m r2 (d)2 (22)Kedua besaran fisika ini penting kelak ketika membahas medan gaya sentral. Kedua besaran ini akan ditunjukkan bersifat kekal perdefinisi. Sampai dengan saat ini kita belum mempertimbangkan gaya eksternal yang bekerja pada benda. Semua pendefinisikan diatas diturunkan menggunakan transformasi koordinat biasa. Ini menunjukkan bahwa kedua besaran diatas terkait dengan sistem koordinat yang kita pergunakan. Pada bab selanjutnya kita akan membahas medan gaya sentral sebagai medan gaya eksternal yang bekerja pada sebuah benda. Persamaan (22) dapat kita peroleh melalui pendekatan dibawah ini
Hukum Newton mengatakan bahwa jika sebuah benda bermassa m dikenai gaya F akan bergerak dipercepat pada lintasan C dengan percepatan sebesar a dimana
Selanjutnya kerja W yang dilakukan oleh gaya F terhadap benda m sejauh dr pada lintasan C dinyatakan sebagai
W = ∫F . dS W = ∫ m d2r . dr
W = m ∫ {(d2r – r dd) er + (2dr d + r d2) e} . {dr er + r d e} W = m ∫{(d2r – r dd) dr} + m ∫ {(2dr d + r d2) r d}
W = m (½ (dr)2 – ½ r2 (d)2) + m ∫ { d d(r2 d)} W = m (½ (dr)2 – ½ r2 (d)2) + m r2 (d)2
W = m ½ (dr)2 + ½ m r2 (d)2 + E’ (24)
dimana E’ adalah konstanta integrasi.
Medan gaya sentral, F(r)
Medan gaya sentral adalah medan gaya yang besarnya hanya bergantung dari jarak r antara sumber medan gaya dengan titik r. Salah satu bentuk medan gaya sentral adalah medan gaya sentral yang besarnya kuat medan gaya sentral E berbanding terbalik dari kuadrat jarak r antara sumber kuat medan dengan titik pengamatan
E(r) = – r –3r = – r –2er (25)
Sebuah benda bermassa m bergerak dibawah pengaruh medan gaya sentral dengan kuat medan
E(r) akan dikenai gaya sentral
F(r) = m E(r) = – m r –2er (26)
dan bergerak dipercepat dengan percepatan
m d2r = – m r –2er (27)
Menggunakan (17) dan (21) pada (27) kita dapatkan
m ((d2r – r dd) er + (2dr d + r d2) e) = – m r –2er (28) Tampak dari persamaan (28) bahwa kita dapat memisahkan persamaan (28) menurut komponen – komponen radial dan tangensial dan memperoleh
d2r – r dd = – r –2 (29)
dan
Untuk sementara kita tinggalkan persamaan (29) dan kita berikan perhatian kepada persamaan (30). Tampak bahwa komponen tangensial secara definisi menjadi nol. Menggunakan (21) kita dapatkan bahwa
dLz = d (r2 d) = 2r dr d + r2 d2 = r (2 dr d + r d2) = r (0) = 0 (31)
yang menunjukkan bahwa momentum angular benda yang bergerak dibawah pengaruh medan gaya sentral tidak berubah terhadap waktu atau kekal. Ini yang disebut dengan hukum kekekalan momentum angular. Selanjutnya besaran momentum angular bersama dengan energi total sistem bersifat kekal dan digabung menjadi hukum kekekalan energi momentum.
Kini kita kembali kepada persamaan (29) yang tidak lain adalah persamaan gerak sistem benda yang berada dibawah pengaruh medan gaya sentral
d2r – r dd + r –2 = 0 (32)
Persamaan kedudukan benda dapat diturunkan dengan memecahkan persamaan diferensial orde dua diatas.
Kini kita tengok kembali jika sebuah benda bermassa m bergerak dibawah pengaruh medan gaya sentral F(r) akan bergerak sejauh dr akan melakukan kerja sebesar
W = ∫F(r)
.
dr = ∫ – m r –2er.
dr (33)Untuk ruas tengah persamaan (33) kita dapat langsung menggunakan hasil (24) sementara ruas kanan persamaan (33) akan kita hitung sekarang
½ m (dr)2 + ½ m r2 (d)2 + E’ = ∫ – m r –2er
.
dr½ m (dr)2 + ½ m r2 (d)2 + E’ = ∫ – m r –2er
.
(dr er + r d e) ½ m (dr)2 + ½ m r2 (d)2 + E’ = ∫ – m r –2 dr = – m (– ½ r –1) + E”½ m (dr)2 + ½ m r2 (d)2 – m r –1 = E (34)
dimana E adalah energi total sistem yang biasa disebut dengan persamaan gerak sistem benda dibawah pengaruh gaya sentral. Mengingat bahwa kita memiliki satu besaran yang juga kekal kita dapat mengubah bentuk persamaan (34) menggunakan (21) dan membagi masing – masing suku dengan 2/m menjadi
Lz–2 (dr)2 + r–2 – 2 Lz–2r –1 = 2Em–1 Lz–2 (35)
Kini kita definisikan sebuah fungsi berbentuk
= r–1 – Lz–2 (36)
d = – r–2 dr (37)
Substistusikan (21) kepada (37) dan kuadratkan kedua ruasnya sehingga diperoleh
(d d–1)2 = (Lz–1 )2 (dr)2 (38)
Kemudian kita substitusikan kembali kepada (35) bersama dengan (36) sehingga didapatkan bentuk persamaan diferensial orde pertama rank dua
(d d–1)2 + 2 = 2Em–1 Lz–2 + 2 Lz–4 (39)
yang memiliki solusi umum berbentuk
= H cos ( + ) (40)
dimana
H = [2Em–1 Lz–2 + 2 Lz–4]1/2 (41)
dan adalah konstanta integrasi. Bila persamaan (40) dan (41) kita kembalikan kepada (36) kita akan mendapatkan
Lz2–1
r = --- (42)
1 + [1 + 2Em–1 Lz2–2 ]1/2 cos ( + )
yaitu persamaan gerak benda bermassa m dibawah pengaruh medan gaya sentral. Tampak dalam persamaan bahwa karakteristik gerak benda tergantung kepada besar E (energi total sistem), m massa benda, Lz (momentum angular) dan (kuat sumber medan gaya).
Orbit Dua Benda
Hukum gravitasi Newton menyatakan bahwa pada dua buah benda bermassa m di r1dan M di r2 akan bekerja gaya tarik gravitasi diantara keduanya yang besarnya berbanding lurus dengan m dan M dan berbanding terbalik atas kuadrat jarak r = r1 – r2 antara kedua benda atau secara matematis dituliskan
d2 m M
F12 = m ---- r1 = – G --- (r1 – r2) (43) dt2 |r1 – r2|3/2
yaitu gaya yang diderita massa m karena massa M dan
d2 M m
F21 =M ---- r2 = – G --- (r2 – r1) (44)
yaitu gaya yang diderita massa M karena massa m atau secara terpadu
Perhatikan bahwa ruas kanan persamaan (45) memiliki kesamaan dengan medan gaya sentral dimana
= G (m + M) (46)
yang menunjukkan bahwa adalah jumlah massa sistem dua benda. Jika (46) kita substitusikan kembali kepada (42) kita akan memperoleh solusi umum persamaan gerak sistem dua benda dibawah pengaruh medan gravitasi
Lz2(G(m+M))–1
r() = --- (47) 1 + [1 + 2Em–1 Lz2(G(m+M))–2 ]1/2 cos ( + )
Titik pusat massa sistem dua benda adalah
m r1 + M r2
rc = --- (48)
m + M
Untuk mendapatkan solusi lebih lengkap kita dapat meninjau dalam empat kemungkinan kasus: a) Titik acuan berada pada titik pusat massa rc = 0 dan karena r = r1 – r2 maka m(r + r2) = – M r2
atau r2 = – (m/(m + M)) r dan r1 = (M/(m+M)) r dimana r = r erdan r memenuhi persamaan (47).
b) Titik acuan berada pada massa m, r1 = 0 dan karena r = r1 – r2 maka r2 = – r dan rc = – (M/(m+M)) r dimana r = r er dan r memenuhi persamaan (47). Pengamat berada pada m mengamati gerakan benda M. Misalkan pengamat berada di Bumi (massa m < M) mengamati gerak relatip Matahari (massa M).
d) Titik acuan tidak berada pada r1, r2 maupun rc Pengamat berada pada suatu titik rx mengamati gerakan benda m dan M yang saling mengorbit. Misalkan pengamat berada di Bumi mengamati gerak sistem bintang ganda.
Persamaan (47) merupakan persamaan ellipsoid
a (1 – e2)
r = --- (49)
1 + e cos
dimana a = sumbu semi mayor, e = eksentrisitas orbit dan = sudut orbit. Menggunakan hasil (47) kita dapatkan bahwa
a (1 – e2) = Lz2(G(m+M))–1 (50)
dan
e = [1 + 2Em–1 L
z2(G(m+M))–2 ]1/2 (51)
Case 1 : Harga e = 0
Untuk harga e = 0 maka (49) menjadi r = a. Dengan perkataan lain jari – jari orbit konstan sehingga menciptakan orbit lingkaran. Harga e membuat persamaan (51) dipenuhi hanya apabila E < 0 atau
e = [1 – 2|E|m–1 Lz2(G(m+M))–2 ]1/2 (52)
dan karena e = 0 maka (50) menjadi a = Lz2(G(m+M))–1 sehingga
|E| = ½ Lz–2 m(G(m+M))2 = ½ a–1 m(G(m+M)) (53)
dan
Lz = (a G(m+M))1/2 (54)
Case 2 : Harga 0 < e < 1
Untuk 0 < e < 1, berlaku (52) yaitu e = [1 – 2|E|m–1 Lz2(G(m+M))–2 ]1/2, dimana E < 0 sehingga
|E| < ½ a–1 m(G(m+M)) (53)
Orbit akan berbentuk ellips dengan eksentrisitas 0 < e < 1. Jari – jari orbit maksimum terjadi pada
ORBIT LINGKARAN
Untuk harga e = 1 dipenuhi bilamana E = 0 sehingga persamaan
½ (dr)2 + ½ r2 (d)2 = G (m + M) r –1 (54)
Sistem Orbit Bumi – Matahari
Bumi mengorbit Matahari dalam suatu orbit elipsoid. Misalkan massa Matahari dilambangkan dengan M sedangkan massa Bumi dilambangkan dengan m. Pengamat di Bumi akan mengamati Matahari ’seolah – olah’ mengelilingi Bumi. Bila kedudukan pengamat adalah di Matahari maka r1 = 0 dan karena r = r1 – r2 maka r = – r2 dimana r2 adalah kedudukan Bumi relatip terhadap Matahari. Kedudukan Bumi dapat dihitung menggunakan persamaan (47) yaitu
Lz2(G(m+M))–1
r() = --- (55) 1 + [1 + 2Em–1 Lz2(G(m+M))–2 ]1/2 cos ( + )
dimana G = 6.668 x 10–8 dyne cm2 g–2, m = 5.9737 x 1024 kg, M = 1.98892 x 1030 kg, sumbu periapsis Bumi = 147.098.074 km dan sumbu apsis Bumi = 152.097.701 km. Peripasis terjadi pada + = 0 dan apsis terjadi pada + = 2 Dengan demikian kita dapat menghitung Lz dan E dari sistem orbit Bumi – Matahari. Jari – jari periapsis
Lz2(G(m+M))–1
Menggunakan kedua data kita dapat menghitung a dan e
(ra – rp) (1,52097701 x 1013 – 1,47098074 x 1013)
e = --- = --- = 0.01671022 (58) (ra + rp) (1,52097701 x 1013 + 1,47098074 x 1013)
a = ½ (ra + rp) = ½ (1,52097701 x 1013 + 1,47098074 x 1013) = 1.49597888 x 1013 cm (59) Selanjutnya kita juga dapat menghitung Lz dan E dari sistem orbit Bumi – Matahari
ORBIT BUMI - MATAHARI
-2.00 -1.50 -1.00 -0.50 0.00 0.50 1.00 1.50 2.00
X (X 1013) cm
Untuk menentukan periode orbit kita kembali menggunakan persamaan (21)
Lz = r2 d (62)
Kemudian kedua ruas kita integrasikan terhadap dt (ruas kanan karena sesungguhnya dq adalah dq/dt maka dt tidak nampak dalam integrasi) memberikan
∫ Lz dt = ∫r2 d (63)
Selanjutnya karena Lz konstan (bukan merupakan fungsi waktu) maka kita akan mendapatkan
Lz (P – 0) = ∫r2 d (63)
dimana P adalah periode orbit sistem dua benda.
P = (Lz–1)∫r2 d (64)
Karena ruas kiri (64) adalah lama waktu tempuh dalam 1 periode orbit sedangkan ruas kanan menunjukkan luas bidang sapuan maka ruas kanan sesungguhnya akan selalu sama dengan laus elips (luas bidang orbit) maka
P = (Lz–1) 2 a2 (1 – e2)1/2 (65)
dan karena Lz = a1/2 G1/2 (m+M)1/2 (1 – e2)1/2 maka
yang merupakan hukum Kepler tentang perbandingan orbit planet. Untuk sistem orbit Matahari
Kini kita juga dapat menentukan kecepatan orbit Bumi. Untuk itu kita menggunakan persamaan
a (1 – e2)
r = --- (68)
1 + e cos
Lalu kita diferensiasikan terhadap dt sehingga diperoleh kecepatan radial
Karakteristik kecepatan orbit Bumi – Matahari
Maksimum Minimum
Radial Velocity (km s–1) 0.49768 -0.49768
Tangential Velocity (km s–1) 30.27203 29.27695
Orbit Velocity (km s–1) 30.27203 29.27695
Appendix A
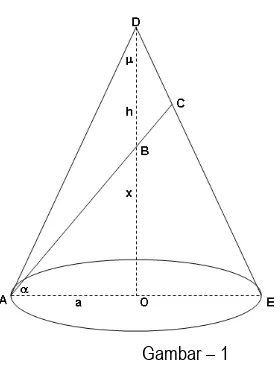
Persamaan Kerucut Terpancung
Sebuah kerucut dengan luas alas adalah a2 dan tinggi h dipancung dengan sudut kemiringan terhadap alas akan memberikan sebuah penampang bidang irisan berbentuk ellips dengan garis tinggi kerucut memotong bidang di titik yang disebut titik fokus ellips.
Gambar – 1
Garis AC adalah sumbu semi mayor ellips yang terletak pada bidang irisan kerucut. Sudut bidang irisan kerucut dengan alas kerucut adalah sehingga sumbu apastron ellips = AB = a / cos dan sumbu periastron ellips = BC. Sudut puncak kerucut adalah 2 sehingga tg = a/h.
Menggunakan rumus segitiga kita punya
sin (90 – ) sin (180 – ( + ))
--- = --- (A01) a/ cos + BC 2a
sehingga
2 sin (90 – ) 1
dan sumbu semi mayor menjadi
dan dengan demikian kita dapat menemukan harga e. Kurangkan (A05) terhadap (A04) kita dapatkan
sin (90 – ) 1
a (– --- + ---) = Ae (A06) sin (180 – ( + )) cos
Selanjutnya harga e diperoleh dengan membagi (A06) terhadap (A03) menjadi