BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini akan dibahas tentang pengujian dan analisis secara keseluruhan dari alat
yang dibuat. Tujuan dari pengujian ini adalah untuk mengetahui apakah alat yang
dirancang telah sesuai dengan spesifikasi yang telah ditulis, sedangkan analisis digunakan
untuk membandingkan hasil perancangan dengan pengujian.
4.1. Pengujian Masuk Ruas Parkir Paralel
Pada pengujian ini, alat akan diuji untuk mengisi parkir jenis paralel. Ada 2 cara
untuk mengisi ruas parkir tersebut, yaitu dengan masuk maju dan masuk mundur Hasil
pengujian dinyatakan berhasil jika alat untuk mengisi ruas parkir tanpa tersenggol media di
sekitarnya dan dapat masuk tidak lebih dari 60 detik.
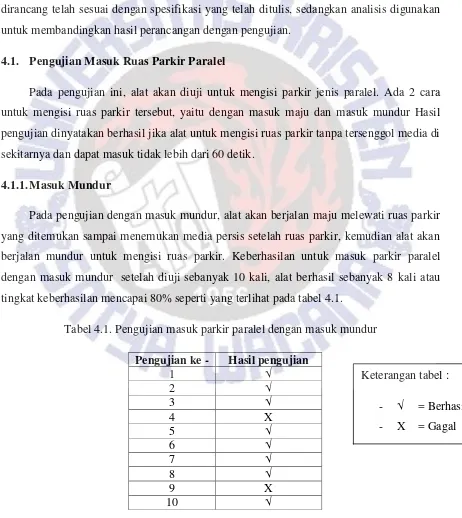
4.1.1.Masuk Mundur
Pada pengujian dengan masuk mundur, alat akan berjalan maju melewati ruas parkir
yang ditemukan sampai menemukan media persis setelah ruas parkir, kemudian alat akan
berjalan mundur untuk mengisi ruas parkir. Keberhasilan untuk masuk parkir paralel
dengan masuk mundur setelah diuji sebanyak 10 kali, alat berhasil sebanyak 8 kali atau
tingkat keberhasilan mencapai 80% seperti yang terlihat pada tabel 4.1.
Tabel 4.1. Pengujian masuk parkir paralel dengan masuk mundur
Pengujian ke - Hasil pengujian
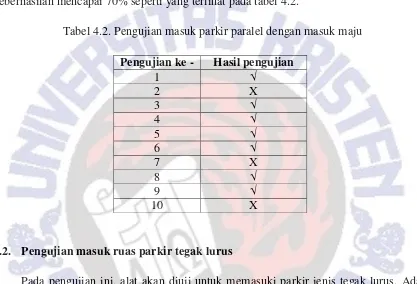
4.1.2.Masuk Maju
Pada pengujian dengan masuk maju, alat akan berjalan hingga sensor infrared pada
sisi kiri depan menemukan adanya ruas kosong. Alat akan berjalan masuk mengisi tempat
parkir tersebut. Keberhasilan untuk masuk parkir paralel dengan masuk maju setelah diuji
sebanyak 10 kali, alat berhasil masuk ke ruas parkir sebanyak 7 kali atau tingkat
keberhasilan mencapai 70% seperti yang terlihat pada tabel 4.2.
Tabel 4.2. Pengujian masuk parkir paralel dengan masuk maju
Pengujian ke - Hasil pengujian
1 √
4.2. Pengujian masuk ruas parkir tegak lurus
Pada pengujian ini, alat akan diuji untuk memasuki parkir jenis tegak lurus. Ada 2
cara untuk masuk ke ruas parkir tegak lurus, yaitu dengan masuk maju dan masuk mundur.
Pada masuk ruas parkir tegak lurus memiliki perbedaan dengan masuk ruas parkir paralel,
dimana parkir tegak lurus dapat mengisi ruas kosong yang berada di sisi kanan dan sisi kiri.
Hasil pengujian dinyatakan berhasil jika alat untuk mengisi ruas parkir tanpa tersenggol
media di sekitarnya dan dapat masuk tidak lebih dari 60 detik.
4.2.1.Masuk Mundur
Pada pengujian masuk mundur ada 2 pengujian yang dilakukan, yaitu pengujian
untuk masuk ruas parkir yang ada di sisi kanan dan sisi kiri. Keberhasilan untuk masuk
parkir tegak lurus dengan masuk mundur untuk sisi kanan setelah diuji sebanyak 10 kali,
alat berhasil masuk ke ruas parkir sebanyak 7 kali atau tingkat keberhasilan mencapai 70%
Tabel 4.3. Pengujian masuk ruas parkir tegak lurus dengan masuk mundur untuk sisi kanan
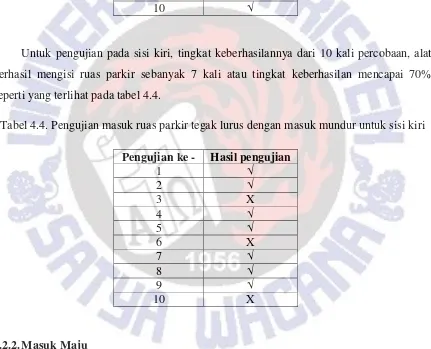
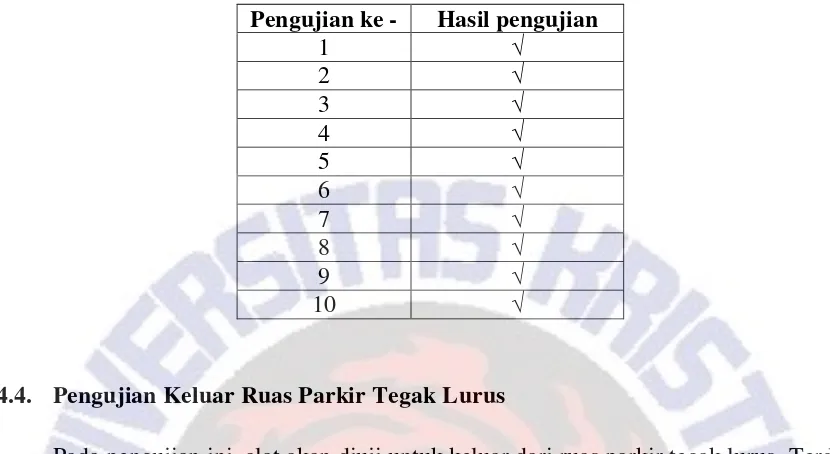
Untuk pengujian pada sisi kiri, tingkat keberhasilannya dari 10 kali percobaan, alat
berhasil mengisi ruas parkir sebanyak 7 kali atau tingkat keberhasilan mencapai 70%
seperti yang terlihat pada tabel 4.4.
Tabel 4.4. Pengujian masuk ruas parkir tegak lurus dengan masuk mundur untuk sisi kiri
Pengujian ke - Hasil pengujian
1 √
terdiri dari 2 pengujian yang dilakukan yaitu masuk ruas parkir pada sisi kiri dan sisi kanan.
Keberhasilan untuk masuk parkir tegak lurus dengan masuk maju untuk sisi kiri setelah
diuji sebanyak 10 kali, alat berhasil masuk ke ruas parkir sebanyak 7 kali atau tingkat
Tabel 4.5. Pengujian masuk ruas parkir tegak lurus dengan masuk maju untuk sisi kiri
Pengujian ke - Hasil pengujian
1 √
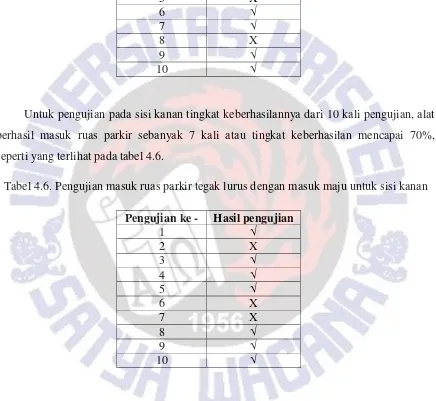
Untuk pengujian pada sisi kanan tingkat keberhasilannya dari 10 kali pengujian, alat
berhasil masuk ruas parkir sebanyak 7 kali atau tingkat keberhasilan mencapai 70%,
seperti yang terlihat pada tabel 4.6.
Tabel 4.6. Pengujian masuk ruas parkir tegak lurus dengan masuk maju untuk sisi kanan
Pengujian ke - Hasil pengujian
1 √
Pada pengujian ini, alat akan diuji untuk keluar dari tempat parkir jenis parkir paralel.
Hasil pengujian dinyatakan berhasil jika alat dapat keluar dari ruas parkir tanpa
menyenggol media di sekitar.
Keberhasilan dari pengujian keluar ruas parkir jenis parkir paralel setelah diuji
sebanyak 10 kali, alat berhasil keluar dari ruas parkir paralel sebanyak 10 kali atau tingkat
Tabel 4.7. Pengujian keluar ruas parkir parkir paralel
Pengujian ke - Hasil pengujian
1 √
4.4. Pengujian Keluar Ruas Parkir Tegak Lurus
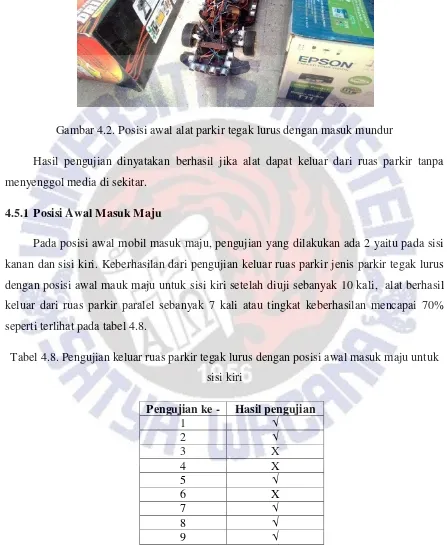
Pada pengujian ini, alat akan diuji untuk keluar dari ruas parkir tegak lurus. Terdapat
perbedaan antara keluar ruas parkir paralel dengan keluar ruas parkir tegak lurus yang
dimana posisi awal alat berbeda. Pada masuk parkir tegak lurus, posisi saat masuk maju
dan masuk mundur berbeda dimana jika masuk maju sisi depan alat terdapat media
sedangkan pada masuk mundur sisi belakang alat terdapat media.
Gambar 4.2. Posisi awal alat parkir tegak lurus dengan masuk mundur
Hasil pengujian dinyatakan berhasil jika alat dapat keluar dari ruas parkir tanpa
menyenggol media di sekitar.
4.5.1 Posisi Awal Masuk Maju
Pada posisi awal mobil masuk maju, pengujian yang dilakukan ada 2 yaitu pada sisi
kanan dan sisi kiri. Keberhasilan dari pengujian keluar ruas parkir jenis parkir tegak lurus
dengan posisi awal mauk maju untuk sisi kiri setelah diuji sebanyak 10 kali, alat berhasil
keluar dari ruas parkir paralel sebanyak 7 kali atau tingkat keberhasilan mencapai 70%
seperti terlihat pada tabel 4.8.
Tabel 4.8. Pengujian keluar ruas parkir tegak lurus dengan posisi awal masuk maju untuk
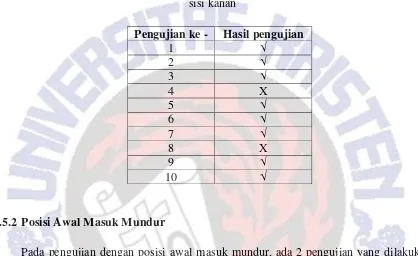
Untuk pengujian pada sisi kanan, tingkat keberhasilan dari pengujian keluar ruas
parkir jenis parkir tegak lurus dengan posisi awal masuk maju untuk sisi kanan setelah
diuji sebanyak 10 kali, alat berhasil keluar dari ruas parkir paralel sebanyak 8 kali atau
tingkat keberhasilan mencapai 80% terlihat pada tabel 4.9.
Tabel 4.9. Pengujian keluar ruas parkir tegak lurus dengan posisi awal masuk maju untuk
sisi kanan
Pengujian ke - Hasil pengujian
1 √
Pada pengujian dengan posisi awal masuk mundur, ada 2 pengujian yang dilakukan
yaitu pada sisi kanan dan sisi kiri. Keberhasilan dari pengujian keluar ruas parkir jenis
parkir tegak lurus dengan posisi awal masuk mundur untuk sisi kiri setelah diuji sebanyak
10 kali, alat berhasil keluar dari ruas parkir paralel sebanyak 8 kali atau tingkat
keberhasilan mencapai 80%.
Tabel 4.10. Pengujian keluar ruas parkir tegak lurus dengan posisi awal masuk mundur
10 √
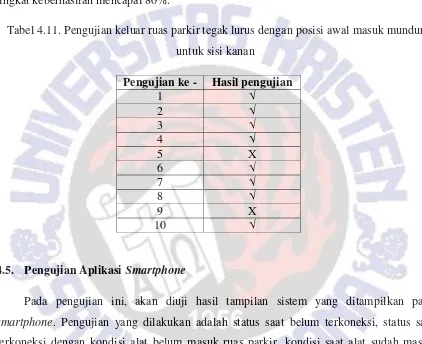
Untuk pengujian pada sisi kanan, tingkat keberhasilan dari pengujian keluar ruas
parkir jenis parkir tegak lurus dengan posisi awal masuk mundur untuk sisi kanan setelah
diuji sebanyak 10 kali, alat berhasil keluar dari ruas parkir paralel sebanyak 8 kali atau
tingkat keberhasilan mencapai 80%.
Tabel 4.11. Pengujian keluar ruas parkir tegak lurus dengan posisi awal masuk mundur
untuk sisi kanan
Pengujian ke - Hasil pengujian
1 √
smartphone. Pengujian yang dilakukan adalah status saat belum terkoneksi, status saat
terkoneksi dengan kondisi alat belum masuk ruas parkir, kondisi saat alat sudah masuk
ruas parkir.
4.5.1 Kondisi Belum Terkoneksi dengan Modul Bluetooth
Pada kondisi ini, smartphone masih belum terkoneksi denbgan modul bluetooh
Gambar 4.3. Smartphone Belum Terkoneksi dengan Modul Bluetooth
Gambar 4.4. Smartphone Telah Terkoneksi dengan Modul Bluetooth
4.5.2 Kondisi masuk parkir
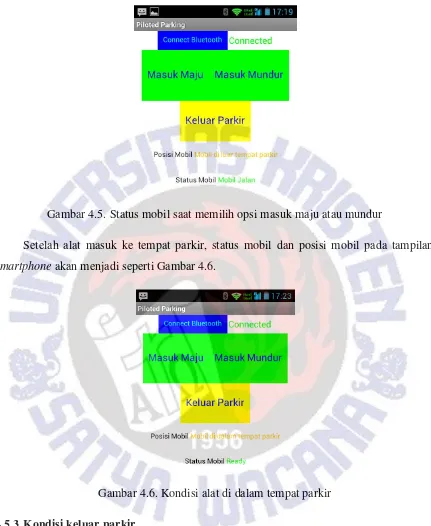
Pada kondisi ini, opsi yang dipilih adalah masuk ruas parkir. Pada opsi yang
tertampil pada layar, terdapat 2 kondisi yaitu masuk maju dan masuk mundur. Jika salah
Gambar 4.5. Status mobil saat memilih opsi masuk maju atau mundur
Setelah alat masuk ke tempat parkir, status mobil dan posisi mobil pada tampilan
smartphone akan menjadi seperti Gambar 4.6.
Gambar 4.6. Kondisi alat di dalam tempat parkir
4.5.3 Kondisi keluar parkir
Pada kondisi ini, opsi yang dipilih adalah keluar parkir. Setelah memilih opsi keluar
parkir, maka status mobil yang tertampil pada tampilan smartphone menjadi seperti pada
Gambar 4.7. Status alat menjalankan kondisi keluar parkir
Setelah alat keluar dari tempat parkir, status mobil dan posisi mobil berubah seperti
pada Gambar 4.8.
Gambar 4.8. Kondisi alat diluar tempat parkir
4.6. Analisa
Pada pengujian alat secara kesuruhan, terdapat beberapa kegagalan pada pengujian.
Hal tersebut dikarenakan adanya kesalahan pengukuran jarak pada sensor ultrasonik
sehingga menghasilkan pengukuran yang tidak semestinya. Kesalahan yang dimaksud
adalah pantulan sinyal yang dilepaskan trigger oleh sensor ultrasonik mengalami beberapa
pantulan sebelum diterima echo sensor. Hal ini yang menyebabkan terjadinya kesalahan