BAB 4
IMPLEMENTASI DAN EVALUASI
Bab ini menjelaskan tentang spesifikasi sistem yang digunakan dari hasil penelitian, prosedur penggunaan alat, dan evaluasi sistem dari data yang di dapat.
4.1 Spesifikasi Sistem
Berikut dibawah ini spesifikasi yang ada pada robot forklift yang dibuat pada skripsi ini :
• Menggunakan AVR ATMEGA8535 sebagai pengendali dari sistem pada robot.
• Menggunakan kristal clock eksternal sebesar 7,3728MHz.
• Menggunakan modul RFID dengan tipe SL030 untuk melakukan proses read/write dari Tag yang digunakan.
• Menggunakan Tag RFID dengan tipe Mifare ISO/IEC 14443A dengan frekuensi 13,56 Mhz.
• Jarak yang dimungkinkan untuk read/write kurang dari 3 cm.
• Besar memori yang digunakan Tag RFID sebesar 96 Byte.
• Format data pada Tag RFID yang digunakan yaitu : 1 bit untuk sisi lemari, 7 bit untuk jalur lemari, 4 bit untuk kolom lemari, 4 bit untuk tingkatan lemari, dan 94 byte untuk isi keterangan.
• Waktu yang diperlukan untuk membaca dan menulis isi data pada memori dari Tag RFID antara 2 sampai dengan 3 detik.
• Besar daya yang digunakan pada robot yaitu : 12,4 V / 5 A untuk motor roda dan forklit dan 12,4 V / 2,2 A untuk sistem robot.
• Ketinggian barang maksimum yang dimungkinkan yaitu sebesar 3 cm (tergantung dari ketinggian robot).
• Jangkauan maksimum lengan forklift untuk naik dan turun sebesar 33 cm.
• Kecepatan robot maju tanpa beban 12,87 cm/s.
• Kecepatan robot mundur tanpa beban 15,39 cm/s.
• Berat robot 13kg.
• Dapat mengerjakan tugas sekali jalan (mengantar atau menaruh barang).
• Body base terbuat dari aluminium 45cm x 35cm dengan tebal 2 mm.
• Konstruksi forklift Æ Besi 3cm x 1.5cm.
• Tiang forklift Æ Teflon silinder diameter 20 mm, panjang 62cm.
• Gir Æ ukuran 27 mata dan ukuran 22 mata.
• 2 buah linear bearing ukuran 20 mm.
• 2 buah bearing pillow block.
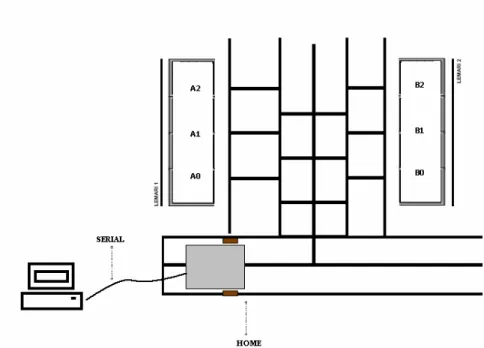
• Dapat mengenali sampai 128 jalur, 2 sisi (A dan B), 16 kolom dan 16 baris pada lemari.
• Program Robot Controller pada PC dibuat dengan menggunakan Visual Studio 2005.
• Untuk komunikasi antara Program Robot Controller pada PC, Robot dan RFID digunakan komunikasi serial.
• Menggunakan SQL 2005 sebagai aplikasi dari database yang dipergunakan.
4.2 Prosedur Pengoperasian Program Robot Controler
Dalam pengoperasian, robot harus sudah berada di jalur nya dan robot telah terhubung dengan PC menggunakan komunikasi serial. Pengguna dapat mengoperasikan robot forklift dari program Robot Controller yang dibuat dengan Visual Studio 2005.
4.2.1 Prosedur Pengoperasian Pilihan RFID
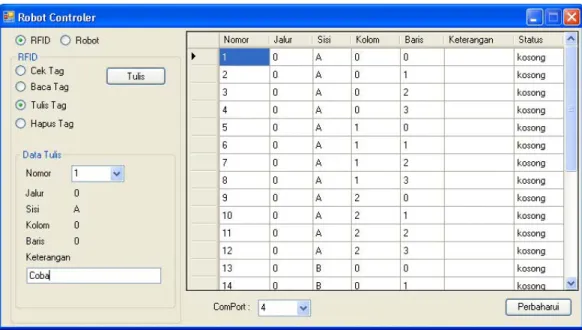
Untuk pengoperasian RFID disediakan 4 fungsi antara lain cek tag untuk membaca nomor seri tag, baca tag untuk membaca isi tag, tulis tag untuk menulis tag dengan koordinat dan keterangan, dan hapus tag untuk menghapus isi tag.
Untuk membaca nomor seri tag, langkah yang perlu dilakukan adalah :
1. Pilih pilihan “Cek Tag” pada pilihan ‘RFID’.
Gambar 4.1 Fungsi ’Cek Tag’
2. Dekatkan tag ke modul RFID_PC.
3. Klik tombol ‘Cek SN’.
Gambar 4.2 Hasil Baca Nomor Seri
Untuk menulis isi tag dengan koordinat dan keterangan, dilakukan langkah-langkah sebagai berikut:
1. Pilih pilihan ‘Tulis Tag’ pada pilihan ‘RFID’.
2. Pilih Nomor Slot lemari yang ingin dimasukkan , kemudian isi keterangan dari tag tersebut.
Gambar 4.3 Pengisian Data yang Akan Ditulis
3. Dekatkan tag ke modul RFID_PC.
4. Klik tombol ‘Tulis’.
Gambar 4.4 Hasil fungsi Tulis Tag
Setelah tag berhasil ditulis, maka status dan keterangan slot tersebut berubah. Status akan berubah dari ‘kosong’ menjadi ‘wait’, sedangkan keterangan akan berisikan keterangan yang telah diketik. Untuk membaca isi tag yang sudah ditulis, langkah-langkah yang diperlukan adalah :
1. Pilih pilihan ‘Baca Tag’ pada pilihan ‘RFID’.
Gambar 4.5 Fungsi Baca Tag
2. Dekatkan tag ke modul RFID_PC.
3. Klik tombol ‘Baca’.
Gambar 4.6 Hasil Baca isi Tag
Jika pengguna ingin mengubah isi dari Tag yang sudah terisi, pengguna harus menghapus isi tag terlebih dahulu dan kemudian baru mengisinya dengan data baru dengan menggunakan fungsi tulis tag. Adapun cara untuk menghapus isi tag adalah:
1. Pilih pilihan ‘Hapus Tag’ pada pilihan RFID.
Gambar 4.7 Fungsi Hapus Tag
2. Dekatkan tag ke modul RFID_PC.
3. Klik tombol ‘Hapus’.
Gambar 4.8 Hapus Isi Tag
Gambar 4.9 Baca Tag yang Kosong
Tag yang kosong bila dibaca akan menghasilkan tampilan seperti pada Gambar 4.9.
4.2.2 Prosedur Pengoperasian Robot
Robot dapat dioperasikan dengan menggunakan dua fungsi yaitu, fungsi taruh dan fungsi ambil. Fungsi taruh digunakan untuk menaruh tag yang sudah di isi dengan koordinat slot lemari dan keterangan barang, sedangkan fungsi ambil digunakan untuk mengambil barang yang berada di slot lemari. Fungsi taruh hanya bisa digunakan untuk barang yang statusnya belum berada di slot lemari (wait), sedangkan fungsi ambil hanya bisa digunakan untuk barang yang statusnya berada di slot lemari (lemari).
Untuk menjalankan fungsi taruh barang, dilakukan dengan langkah- langkah:
1. Posisikan Robot sesuai dengan Gambar 4.10
Gambar 4.10 Posisi Awal Robot
2. Pilih pilihan ‘Taruh’ pada pilihan ‘Robot’.
Gambar 4.11 Fungsi Taruh
3. Taruh Tag pada lengan forklift.
4. Klik tombol ‘Taruh’.
Gambar 4.12 Fungsi Taruh
5. Taruh barang yang telah ditempeli Tag RFID pada lengan forklit.
6. Lepaskan Kabel serial sebelum robot jalan (3 detik dari message box seperti yang ditunjukkan Gambar 4.11 muncul). Arah robot dapat dilihat pada kotak taruh seperti pada gambar 4.11.
Setelah langkah-langkah tadi, database slot yang dituju akan berubah menjadi ‘lemari’. Perjalanan robot dianggap tidak mengalami masalah dan barang berhasil diletakkan pada slot lemari yang dituju. Setelah barang berada pada slot lemari, sekarang barang dapat diambil dengan menggunakan fungsi ambil. Untuk mengoperasikan fungsi ambil digunakan langkah-langkah sebagai berikut :
1. Posisikan Robot sesuai dengan Gambar 4.10.
2. Pilih pilihan ‘Ambil’ pada pilihan ‘Robot’.
3. Pilih nomor dari slot lemari yang akan diambil barangnya.
Gambar 4.13 Fungsi Ambil
4. Klik tombol ‘Ambil’
Gambar 4.14 Fungsi Ambil
5. Lepaskan kabel serial sebelum robot jalan (3 detik dari message box seperti yang ditunjukkan Gambar 4.13 muncul).
Fungsi tulis tag pada program Robot Controller akan langsung menimpa data pada tag dan tidak menghapus data yang ada database, sehingga agar tidak terjadi kesalahan dalam memperbaharui data, maka perlu menghapus menjalankan fungsi hapus tag terlebih dahulu baru kemudian bisa memanggil.
4.3 Analisis Hasil Percobaan
Analisa yang dilakukan ialah dengan melalui beberapa percobaan untuk mendapatkan data-data yang dibutuhkan. Bagian yang akan diuji ialah pada bagian kemampuan robot secara satu bagian ataupun secara keseluruhan, bagian pengaplikasian RFID, dan sistem secara keseluruhan.
4.3.1 Pengujian PWM pada Roda Kiri dan Kanan
Karena roda kiri dan kanan tidak berputar dengan kecepatan yang sama, maka diperlukan suatu cara untuk mensinkronkan kedua roda sehingga dapat berjalan pada saat yang bersamaan dengan kecepatan dan torsi yang hampir sama.
Oleh karena itu digunakanlah tehnik PWM untuk mengatur perputaran pada roda kiri dan kanan. Untuk itu dilakukan pengujian antara roda kiri dan kanan untuk mencari nilai PWM yang paling baik bagi keduanya. Pengujian dilakukan dengan
memberikan PWM yang berbeda-beda pada roda dan mencari RPM dari roda tersebut. Hasil pengambilan data roda kiri dapat dilihat pada Gambar 4.14, sedangkan hasil pengambilan data untuk roda kanan dapat dilihat pada Gambar 4.15. Kedua percobaan untuk roda kiri dan roda kanan dilakukan dengan kondisi tegangan sumber 12,4V dan menggunakan frekuensi PWM 112,5Hz.
Gambar 4.15 Output Roda Kiri setelah di PWM
Gambar 4.16 Output Roda Kanan setelah di PWM
Gambar 4.17 Perbandingan Output antara Roda Kiri dan Kanan
Untuk dapat mendapatkan nilai PWM yang menghasilkan RPM yang sama maka kedua grafik (Gambar 4.14 dan Gambar 4.15) tersebut disatukan dan dibandingkan seperti pada Gambar 4.18. Dari grafik pada Gambar 4.16 tersebut didapat nilai - nilai PWM yang menghasilkan RPM yang hampir sama. Kemudian nilai-nilai tersebut dicoba pada robot dengan beban. Setelah mengalami proses kalibrasi untuk mendapatkan pergerakan yang lurus maka diambil nilai PWM yang memungkinkan dan dapat dipergunakan. Nilai PWM yang digunakan dapat dilihat pada Table 4.1.
Tabel 4.1 Tabel Duty Cycle Roda yang digunakan pada Robot
4.3.2 Pengujian Modul RFID_PC
Dilakukan empat percobaan untuk menguji modul RFID_PC. Percobaan yang dilakukan antar lain percobaan fungsi cek tag, fungsi tulis tag’, fungsi baca tag, dan fungsi hapus tag.
Percobaan fungsi cek tag dilakukan untuk membaca nilai dari nomor seri setiap Tag dengan 20 kali percobaan dimana 10 percobaan dengan memberikan tag dan 10 percobaan dengan tidak memberikan tag. Modul RFID membaca setiap Tag dengan jarak kurang dari 3 cm. Hasil percobaan fungsi cek tag dapat dilihat pada Tabel 4.2.
Tabel 4.2 Percobaan baca serial number dari Tag
Input Hasil
#Percobaan
#Tag # Seri Keterangan
1 1 9C10CF21 Ada Tag
2 - - Tidak Ada Tag
3 2 BCAFCE21 Ada Tag
4 - - Tidak Ada Tag
5 3 5CC2CC21 Ada Tag
6 - - Tidak Ada Tag
7 4 8C21CD21 Ada Tag
8 - - Tidak Ada Tag
9 5 6C35CE21 Ada Tag
10 - - Tidak Ada Tag
11 6 5CACCC21 Ada Tag
12 - - Tidak Ada Tag
13 7 9CC2CE21 Ada Tag
14 - - Tidak Ada Tag
15 8 3CF2CE21 Ada Tag
16 - - Tidak Ada Tag
17 9 DC1CCC21 Ada Tag
18 - - Tidak Ada Tag
19 10 BC96CF21 Ada Tag
20 - - Tidak Ada Tag
Dalam percobaan fungsi cek tag terlihat bahwa fungsi cek tag berjalan dengan baik. Modul dapat mendeteksi ada tidaknya Tag dan membaca nomor seri dari setiap tag yang terdeteksi. Dari percobaan tersebut dapat dilihat bahwa setiap tag RFID memiliki nomor seri yang berbeda-beda.
Percobaan fungsi tulis tag dilakukan untuk mengisi tag dengan koordinat dari slot lemari yang akan digunakan untuk menaruh tag tersebut. Percobaan ini dilakukan sebanyak 10 kali dengan 10 tag yang berbeda-beda. Hasil percobaan fungsi tulis tag dapat dilihat pada Tabel 4.3.
Tabel 4.3 Percobaan Tulis Tag
Masukkan
#Percobaan
#Tag #Slot Keterangan
Hasil
1 1 4 Percobaan 1 Berhasil ditulis 2 2 3 Percobaan 2 Berhasil ditulis 3 3 6 Percobaan 3 Berhasil ditulis 4 4 13 Percobaan 4 Berhasil ditulis 5 5 9 Percobaan 5 Berhasil ditulis 6 6 17 Percobaan 6 Berhasil ditulis 7 7 20 Percobaan 7 Berhasil ditulis 8 8 7 Percobaan 8 Berhasil ditulis
9 9 12 Percobaan 9 Berhasil ditulis 10 10 19 Percobaan 10 Berhasil ditulis
Dari percobaan fungsi tulis tag dapat dilihat bahwa modul RFID_PC dapat menulis data pada tag dengan baik. Pada percobaan ini juga dapat dilihat bahwa memori dari tag dapat ditulis dengan data apapun. Data yang dimasukkan pada percobaan ini adalah data koordinat slot lemari dan data keterangan dari tag.
Percobaan fungsi baca tag dilakukan untuk membaca data dari memori tag. Pada percobaan ini yang dibaca adalah 96Byte data pada memori tag yang terdiri dari koordinat lemari dan keterangan tag. Percobaan ini dilakukan sebanyak 10 kali dengan menggunakan tag yang telah diisi pada percobaan fungsi
‘Tulis Tag’. Hasil dari percobaan fungsi baca tag dapat dilihat pada Tabel 4.4.
Tabel 4.4 Percobaan Baca Tag
Masukkan Hasil
#Percobaan
#Tag Status #Slot Keterangan 1 1 Berhasil dibaca 4 Percobaan 1 2 2 Berhasil dibaca 3 Percobaan 2 3 3 Berhasil dibaca 6 Percobaan 3 4 4 Berhasil dibaca 13 Percobaan 4
5 5 Berhasil dibaca 9 Percobaan 5 6 6 Berhasil dibaca 17 Percobaan 6 7 7 Berhasil dibaca 20 Percobaan 7 8 8 Berhasil dibaca 7 Percobaan 8 9 9 Berhasil dibaca 12 Percobaan 9 10 10 Berhasil dibaca 19 Percobaan 10
Dari percobaan fungsi baca tag terlihat bahwa data yang ditulis dengan data yang dibaca memiliki kesamaan, sehingga terlihat bahwa modul RFID_PC dapat menulis dan membaca data dengan baik. Dengan melakukan kedua percobaan tersebut maka fungsi dari tag dapat dimaksimalkan. Tag RFID dapat digunakan sebagai media pengenal dengan membaca nomor serinya dan juga dapat digunakan sebagai media penyimpanan dalam hal ini digunakan untuk menyimpan koordinat slot lemari dan keterangan mengenai isi slot lemari tersebut.
Percobaan fungsi hapus tag digunakan untuk menghapus isi tag. Tag dihapus dengan menuliskan 0FFh pada setiap byte yang digunakan. Percobaan ini dilakukan sebanyak 10 kali menggunakan 10 tag yang dipakai pada percobaan sebelumnya. Hasil dari percobaan fungsi hapus tag dapat dilihat pada Tabel 4.5.
Tabel 4.5 Percobaan Hapus Tag
Masukkan
#Percobaan
#Tag
Hasil
1 1 Berhasil dihapus 2 2 Berhasil dihapus 3 3 Berhasil dihapus 4 4 Berhasil dihapus 5 5 Berhasil dihapus 6 6 Berhasil dihapus 7 7 Berhasil dihapus 8 8 Berhasil dihapus 9 9 Berhasil dihapus 10 10 Berhasil dihapus
Dari percobaan fungsi hapus tag dapat dilihat bahwa fungsi hapus ini berjalan dengan baik. Penghapusan data dengan menimpa data dengan 0FFh agar tidak terjadi bentrok data, karena koordinat 0FFFFh artinya slot lemari berada pada jalur 127B, kolom 15 dan baris 15 dimana hal posisi ini sangat kecil kemungkinannya untuk digunakan. Dengan demikian kemampuan maksimal
sistem secara teori untuk menyimpan adalah sebanyak 65.534 slot lemari. Dan data kosong menggunakan koordinat dari lemari ke- 65.535.
4.3.3 Pengujian Komunikasi Robot dengan Program Robot Controller
Pengujian Komunikasi Robot dengan Program Robot Controller menggunakan 2 buah percobaan. Percobaan yang dilakukan antara lain percobaan menggunakan fungsi Taruh dan percobaan menggunakan fungsi Ambil. Pada pengujian ini digunakan tag dengan isi seperti pada Tabel 4.6.
Tabel 4.6 Daftar Tag pada percobaan Komunikasi Robot dengan Komputer
#Tag #Slot #Tag #Slot
1 3 6 20
2 6 7 19
3 10 8 9
4 1 9 Palsu 5 2 10 Palsu
Penggunaan tag dengan nomor slot ‘Palsu’ artinya nomor slot tersebut tidak ada pada database saat dilakukannya percobaan. Database yang disediakan pada percobaan sebanyak 24 buah yang mana database tersebut digunakan untuk menyimpan 24 data koordinat slot lemari.
Percobaan fungsi taruh dilakukan dengan mencoba mengirimkan tag sebanyak dua kali berutur-turut. Percobaan dilakukan sebanyak 20 kali dengan menggunakan 10 tag pada Tabel 4.6 . Hasil percobaan fungsi taruh dapat dilihat pada Tabel 4.7.
Tabel 4.7 Percobaan Taruh Barang dengan Tag berbeda – beda
#Percobaan #Tag Status Status Awal DB
Status Akhir DB
Keterangan
1 1 Jalan Wait Lemari Robot berjalan ke slot # 3
2 1 Tidak Jalan Lemari Lemari Tag Tidak Sesuai
3 2 Jalan Wait Lemari Robot berjalan ke slot # 6
4 2 Tidak Jalan Lemari Lemari Tag Tidak Sesuai
5 3 Jalan Wait Lemari Robot berjalan ke slot # 10
6 3 Tidak Jalan Lemari Lemari Tag Tidak Sesuai
7 4 Jalan Wait Lemari Robot berjalan ke slot # 1
8 4 Tidak Jalan Lemari Lemari Tag Tidak Sesuai
9 5 Jalan Wait Lemari Robot berjalan ke slot # 2
10 5 Tidak Jalan Lemari Lemari Tag Tidak
Sesuai
11 6 Jalan Wait Lemari Robot berjalan ke slot # 20
12 6 Tidak Jalan Lemari Lemari Tag Tidak Sesuai
13 7 Jalan Wait Lemari Robot berjalan ke slot # 19
14 7 Tidak Jalan Lemari Lemari Tag Tidak Sesuai 15 8 Tidak Jalan Wait Lemari Robot berjalan
ke slot # 9 16 8 Tidak Jalan Lemari Lemari Tag Tidak
Sesuai 17 9 Tidak Jalan - - Tag Tidak
Sesuai 18 9 Tidak Jalan - - Tag Tidak
Sesuai 19 10 Tidak Jalan - - Tag Tidak
Sesuai 20 10 Tidak Jalan - - Tag Tidak
Sesuai
Dari hasil percobaan dapat dilihat bahwa sistem tidak dapat bekerja bila tag yang diberikan adalah ternyata susah berada di lemari, hal ini terbukti pada percobaan ke-2, ke-4, ke-6, ke-8, ke-10, ke-12, ke-14, dan ke-16 dimana kedelapan percobaan tersebut menghasilkan keterangan ‘Tag tidak sesuai’. Hal ini terjadi karena status awal tag pada database menyatakan bahwa tag sudah berada
pada lemari. Sehingga dengan demikian robot tidak akan ‘diijinkan’ untuk mengantarkan tag ke slot lemari tersebut. Sedangkan untuk percobaan ke-17 hingga ke-20 robot juga tidak jalan dan dihasilkan keterangan ‘Tag tidak sesuai’
pula pada program Robot Controller. Hal tersebut terjadi karena Tag yang diberikan tidak terdapat pada database, sehingga robot tidak ‘diijinkan’ untuk menaruh tag tersebut.
Percobaan fungsi ambil dilakukan sebanyak 24 kali dengan menggunakan tag nomor 1 hingga nomor 8 dari Tabel 4.6 . Pada percobaan ini tidak digunakan tag nomor 9 dan 10 karena tag tersebut tidak berada pada database, sehingga tidak memungkinkan untuk dipilih. Percobaan dilakukan sebanyak 3 kali pada setiap slot. Ketiga percobaan tersebut menggunakan tag yang berbeda. Pertama digunakan tag yang sesuai dengan slot yang dipilih, kedua dengan menggunakan tag dari slot lain, dan yang ketiga dengan tidak menggunakan tag. Hasil dari percobaan fungsi ambil ini dapat dilihat pada Tabel 4.8.
Tabel 4.8 Percobaan Ambil Barang dengan Tag Berbeda pada Tiap Slot
#Percobaan #Slot #Tag Keterangan
1 3 1 Ready
2 3 2 Error Cocok
3 3 - Error No Tag
4 6 2 Ready
5 6 3 Error Cocok
6 6 - Error No Tag
7 10 3 Ready
8 10 4 Error Cocok 9 10 - Error No Tag 10 1 4 Ready 11 1 5 Error Cocok 12 1 - Error No Tag 13 2 5 Ready 14 2 6 Error Cocok 15 2 - Error No Tag 16 20 6 Ready 17 20 7 Error Cocok 18 20 - Error No Tag 19 19 7 Ready 20 19 8 Error Cocok 21 19 - Error No Tag 22 9 8 Ready 23 9 1 Error Cocok 24 9 - Error No Tag
Keterangan pada Tabel 4.8 adalah keterangan yang diterdapat pada LCD robot pada saat robot kembali ke home. Keterangan ‘Ready’ artinya barang yang
diambil sesuai dengan apa yang diminta, keterangan ‘Error Cocok’ artinya tag yang diambil tidak sesuai dengan apa yang diminta, sehingga perlu dilakukan pengecekan lagi oleh operator apakah benar tag tersebut tidak sesuai atau tidak.
Hal ini dimaksudkan agar pengguna dapat melakukan pengecekan kembali, sedangkan keterangan ‘Error No Tag’ artinya robot tidak mendeteksi adanya tag yang berhasil diambil. Dari hasil percobaan fungsi ambil tersebut dapat dilihat bahwa robot dapat mengeluarkan pesan kesalahan sesuai dengan kondisi kesalahannya.
4.3.4 Pengujian Pergerakan Robot
Untuk mengetahui kecepatan yang dapat ditempuh oleh robot dan berapa simpangan yang dihasilkan dari setiap pergerakannya maka robot diuji dengan beberapa pengujian seperti pergerakan saat berjalan lurus, mundur, dan saat menuju koordinat yang diinginkan.
A. Pergerakan Maju Robot Mengikuti Garis Sejauh 50cm
Pengujian ini dilakukan untuk melihat respon dari pergerakan robot saat harus berjalan maju mengikuti garis lurus sejauh 50 cm dengan tanpa ada rintangan pada jalur yang dilalui oleh robot. Tegangan pada robot sekitar 12,4 volt
dan robot berada tegak lurus terhadap garis trak. Pengujian dilakukan dengan dua kondisi yaitu dengan beban sebesar 500 gram dan dengan tanpa beban.
Tabel 4.9 Pergerakan Maju Robot Sejauh 50cm dengan Tanpa Beban
Percobaan Waktu (s) Kecepatan (cm/s)
Kemiringan Robot Terhadap
Trak (derajat)
Pergerakan robot saat
berjalan
1 3,70 13,50 5 Lurus
2 4,10 12,19 2 Berbelok-belok
3 4,00 12,50 5 Berbelok-belok
4 3,50 14,28 6 Lurus
5 4,20 11,90 9 Berbelok-belok
6 3,81 13,12 7 Lurus
7 3,94 12,69 5 Lurus
8 4,05 12,34 6 Berbelok-belok
9 4,11 12,16 3 Berbelok-belok
10 4,18 11,96 8 Berbelok-belok
3,96 12,66 5,6
Tabel 4.10 Pergerakan Maju Robot Sejauh 50cm dengan Beban 500gr
Percobaan Waktu (s) Kecepatan (cm/s)
Kemiringan Robot Terhadap
Trak (derajat)
Pergerakan robot saat
berjalan
1 3,40 14,70 2 Lurus
2 3,20 15,62 4 Lurus
3 3,90 12,82 5 Berbelok-belok
Rata -rata
4 3,50 14,28 4 Lurus
5 2,50 20,00 2 Lurus
6 3,71 13,47 4 Lurus
7 3,89 12,85 5 Berbelok-belok
8 4,10 12,19 3 Berbelok-belok
9 3,90 12,82 5 Lurus
10 4,13 12,10 3 Berbelok-belok
3,62 14,08 3,7
Dari Tabel 4.9 dapat dilihat bahwa kecepatan rata-rata robot untuk berjalan maju adalah sebesar 12,66 cm/s dengan kemiringan 5,6 derajat. Sedangkan dari Tabel 4.10 didapat kecepatan rata-rata robot untuk berjalan maju adalah sebesar 14,08 dengan kemiringan 3,7o. Dari kedua tabel tersebut dapat dilihat bahwa pada saat robot berjalan dengan lurus kecepatan yang dihasilkan lebih tinggi dari pada robot berjalan dengan berbelok-belok.
B. Pergerakan Mundur Robot Mengikuti Garis Sejauh 50cm
Pada pengujian ini robot akan diuji untuk melihat respon dari pergerakan robot saat harus berjalan mundur mengikuti garis lurus sejauh 50 cm dengan tanpa ada rintangan pada jalur yang dilalui oleh robot. Tegangan pada robot sekitar 12,4 volt dan robot berada tegak lurus terhadap garis trak. Pengujian dilakukan dengan dua kondisi yaitu dengan beban sebesar 500 gram dan dengan tanpa beban.
Rata -rata
Tabel 4.11 Pergerakan Mundur Robot Sejauh 50cm dengan Tanpa Beban
Percobaan Waktu (s) Kecepatan (cm/s)
Kemiringan Robot Terhadap
Trak (derajat)
Pergerakan robot saat
berjalan
1 3,90 12,82 12 Berbelok-belok
2 3,10 16,12 17 Lurus
3 2,90 17,24 5 Lurus
4 3,30 15,15 13 Berbelok-belok
5 3,20 15,62 6 Lurus
6 3,56 14,44 8 Berbelok-belok
7 3,40 14,70 9 Lurus
8 3,74 13,36 10 Berbelok-belok
9 3,71 13,47 7 Berbelok-belok
10 3.87 12,91 11 Berbelok-belok
3,46 14,58 9,8
Tabel 4.12 Pergerakan Mundur Robot Sejauh 50cm dengan Beban 500gr
Percobaan Waktu (s) Kecepatan (cm/s)
Kemiringan Robot Terhadap
Trak (derajat)
Pergerakan robot saat
berjalan
1 3,50 14,28 12 Berbelok-belok
2 3,40 14,70 15 Lurus
3 3,20 15,62 17 Berbelok-belok
4 3,60 13,88 1 Lurus
5 4,00 12,50 7 Berbelok-belok
6 3,67 13,62 5 Lurus
7 3,56 14,04 11 Berbelok-belok
Rata -rata
8 3,86 12,95 8 Berbelok-belok
9 3,91 12,78 6 Lurus
10 3,45 14,49 13 Berbelok-belok
3,61 13,88 9,5
Hasil yang diperoleh pada Tabel 4.11 dan Tabel 4.12 menunjukkan pergerakan robot pada saat mundur cenderung tidak stabil. Hal ini terjadi karena robot hanya menggunakan 2 buah sensor pada saat mundur sebagai acuan utama, sehingga robot cenderung untuk menyimpang.
C. Pergerakan Robot Menuju Lemari
Dalam mencari waktu yang dibutuhkan oleh robot untuk mencapai lemari yang dituju maka dilakukan beberapa percobaan yang dilakukan dengan dua kondisi, yaitu ketika robot menuju tujuan dengan beban 500 gram atau dengan tanpa beban. Percobaan awal dilakukan dengan mencari waktu robot untuk mencapai lemari yang dituju dan kemudian percobaan berikutnya yaitu mencari waktu keseluruhan saat robot menuju lemari dan kemudian kembali menuju home.
Keadaan robot pada saat dilakukan pengujian yaitu robot berada di home, catu daya pada robot diatas 12,3 volt, dan tidak ada halangan pada jalur yang dilewati. Robot diperintahkan untuk menaruh barang yang telah ditempel dengan Tag RFID dimana Tag tersebut telah berisi kordinat lemari tujuan. Setelah barang
Rata -rata
berada di lengan forklift maka program Robot Controller dijalankan dengan memerintahkan robot untuk menaruh barang tersebut ke lemari yang dapat diisi dengan barang tersebut. Prosedur yang dilakukan pada program Robot Controller ialah dengan mengisi nomor barang pada bagian ‘Taruh’ setelah itu robot diinstruksikan untuk menaruh barang.
Tabel 4.13 Lama Waktu Robot Menuju Lemari dengan Tanpa Beban (1)
Percobaan Lemari A0 (s) Lemari A1 (s) Lemari A2 (s)
1 17,50 18,50 20,40
2 15,50 18,60 21,20
3 16,30 19,20 21,30
4 16,32 18,64 21,63
5 16,42 18,67 21,64
6 16,76 18,41 22,14
7 16,89 18,86 21,82
8 17,21 19,15 21,81
9 17,25 18,79 21,73
10 17,14 18,93 21,97
16,72 18,77 21,56
Keberhasilan = 100%
Tabel 4.14 Lama Waktu Robot Menuju Lemari dengan Tanpa Beban (2)
Percobaan Lemari B0 (s) Lemari B1 (s) Lemari B2 (s)
1 16,17 18,20 21,50
Rata -rata
2 16,80 18,20 21,80
3 15,40 19,00 22,10
4 15,73 18,34 21,53
5 15,88 18,29 21,74
6 16,31 18,41 22,13
7 16,78 18,76 21,72
8 16,91 18,85 21,75
9 16,74 18,69 21,64
10 17,13 18,93 21,87 16,38 18,57 21,77
Keberhasilan = 100%
Berdasarkan Tabel 4.13 dan Tabel 4.14 dapat dilihat perbedaan waktu rata-rata ketika robot menuju ke lemari dari sisi yang berbeda antata sisi A dan sisi B. Waktu yang ditempuh menuju sisi B lebih singkat dibandingkan dengan sisi A dikarena perbedaan karakter dari jalur pada robot yang dibuat mengikuti bentuk desain robot. Selain itu perbedaan waktu dapat terjadi karena perbedaan karakteristik roda saat berputar dimana roda kiri lebih stabil dibandingkan dengan roda kanan sehingga ketika robot berbelok ke sisi B yang dimana roda kiri lebih dominan terpakai, robot dapat lebih stabil dalam mengikuti garis pada jalur. Dari setiap percobaan tersebut, robot dapat berjalan lurus dengan baik selama menuju lemari.
Rata -rata
Percobaan berikut dilakukan dengan menginstruksikan robot untuk berjalan menuju lemari yang dituju kemudian diinstruksikan lagi untuk kembali ke home.
Tabel 4.15 Lama Waktu Robot Menuju Lemari A0 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 39,70 Terjadi error saat jalan mundur sebanyak dua kali
2 38,73 Berhasil
3 38,90 Berhasil
4 39,45 Terjadi error saat jalan mundur sebanyak satu kali
5 39,32 Berhasil 6 39,52 Terjadi error saat jalan
mundur sebanyak satu kali
7 39,48 Berhasil 8 39,51 Terjadi error saat jalan
mundur sebanyak dua kali
9 39,43 Berhasil 10 39,46 Berhasil Keberhasilan = 60%
Tabel 4.16 Lama Waktu Robot Menuju Lemari B0 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 38,72 Berhasil
2 38,89 Berhasil 3 38,95 Terjadi error saat jalan
mundur sebanyak satu kali
4 38,91 Berhasil 5 38,83 Berhasil 6 38,96 Terjadi error saat jalan
mundur sebanyak satu kali 7 39,21 Terjadi error saat jalan
mundur sebanyak satu kali
8 38,23 Berhasil
9 38,42 Berhasil
10 38,75 Berhasil Keberhasilan = 70%
Tabel 4.17 Lama Waktu Robot Menuju Lemari A1 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 44,30 Berhasil
2 44,40 Berhasil
3 45,31 Terjadi error saat jalan mundur sebanyak satu kali
4 44,25 Berhasil 5 44,37 Berhasil 6 44,31 Berhasil 7 45,25 Terjadi error saat jalan
mundur sebanyak satu kali
8 45,14 Terjadi error saat jalan mundur sebanyak satu kali 9 45,28 Terjadi error saat jalan
mundur sebanyak satu kali 10 45,32 Terjadi error saat jalan
mundur sebanyak satu kali Keberhasilan = 50%
Tabel 4.18 Lama Waktu Robot Menuju Lemari B1 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 44,19 Berhasil 2 44,11 Berhasil 3 44,22 Berhasil 4 44,73 Terjadi error saat jalan
mundur sebanyak satu kali
5 44,31 Berhasil
6 44,19 Berhasil
7 45,11 Terjadi error saat jalan mundur sebanyak satu kali 8 44,97 Terjadi error saat jalan
mundur sebanyak satu kali 9 45,13 Terjadi error saat jalan
mundur sebanyak satu kali
10 44,32 Berhasil Keberhasilan = 60%
Tabel 4.19 Lama Waktu Robot Menuju Lemari A2 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 48,20 Berhasil
2 48,72 Terjadi error saat jalan mundur sebanyak satu kali 3 48,82 Terjadi error saat jalan
mundur sebanyak tiga kali
4 48,45 Berhasil
5 47,87 Berhasil
6 48,65 Terjadi error saat jalan mundur sebanyak satu kali
7 47,94 Berhasil
8 47,97 Berhasil 9 48,52 Berhasil 10 48,76 Terjadi error saat jalan
mundur sebanyak dua kali Keberhasilan = 60%
Tabel 4.20 Lama Waktu Robot Menuju Lemari B2 dengan Tanpa Beban
Percoabaan Waktu (s) Keterangan
1 47,87 Berhasil
2 47,95 Terjadi error saat jalan mundur sebanyak satu kali
3 47,17 Berhasil
4 48,15 Terjadi error saat jalan
mundur sebanyak satu kali
5 47,24 Berhasil
6 47,57 Berhasil 7 47,92 Berhasil 8 48,26 Terjadi error saat jalan
mundur sebanyak dua kali 9 48,12 Terjadi error saat jalan
mundur sebanyak satu kali 10 48,32 Terjadi error saat jalan
mundur sebanyak dua kali Keberhasilan = 50%
Robot masih mengalami error saat robot harus berjalan mundur.
Persentasi error dari percobaan tersebut terjadi disaat robot telah berhasil menghantarkan barang ke lemari, saat robot harus kembali ke home yang dimana robot harus berjalan mundur dengan mengikuti jalur yang sama ketika berangkat.
Robot menjadi kehilangan arah disebabkan karena sensor belakang yang tidak sempurna dalam mendeteksi semua kemungkinan garis yang sedang dijalani robot saat berjalan mundur. Ketika error sedang terjadi maka robot akan mengidentifikasikannya melalu modul LCD yang menampilkan pesan “ERROR : PINDAHKAN”. Dari sepuluh kali percobaan terhadap tujuan yang sama, robot masih mengalami error saat jalan mundur dimana mengalami persentasi error antara 30-50% yang semuanya terjadi karena posisi robot yang kurang stabil setelah keluar dari belokan pada tiap lemari. Namun saat robot berjalan menuju lemari tujuan, robot dapat berjalan lurus dengan baik.
4.3.5 Pengujian Forklift
Pengujian ini dilakukan untuk mengetahui berapa waktu rata-rata yang diperlukan forklift setiap menuju lemari yang dituju. Selain itu percobaan ini dilakukan untuk melihat tingkat kehandalan forklift ketika menuju lemari, apakah forklift berhenti pada lemari yang dituju dan apakah forklift dapat beroperasi dengan baik ketika diberi beban. Jarak antara tiap tingkat forklift sebesar 9,5 cm dan penghitungan waktu dilakukan dengan mengacu pada sensor forklift dan indikator forklift.
Tabel 4.21 Percobaan Forklift untuk Tingkat Satu
Data Waktu Forklift (tingkat satu) Percobaan Waktu Naik (tanpa
beban) (s)
Waktu Naik (beban 500gr) (s)
1 1,40 1,30
2 1,40 1,40
3 1,40 1,20
4 1,30 1,40
5 1,30 1,40
6 1,30 1,50
7 1,40 1,50
8 1,40 1,30
9 1,20 1,60
10 1,40 1,30
1,35 1,39
Tabel 4.22 Percobaan Forklift untuk Tingkat Dua
Data Waktu Forklift (tingkat dua) Percobaan Waktu Naik (tanpa
beban) (s)
Waktu Naik (beban 500gr) (s)
1 1,70 2,50
2 1,60 2,40
3 2,10 2,20
4 1,60 2,00
5 2,00 2,00
6 1,60 2,10
7 2,30 2,30
8 1,90 2,00
9 2,00 2,50
10 2,20 2,50 1,90 2,25
Rata -rata Rata -rata
Tabel 4.23 Percobaan Forklift untuk Tingkat Tiga
Data Waktu Forklift (tingkat tiga) Percobaan Waktu Naik (tanpa
beban) (s)
Waktu Naik (beban 500gr) (s)
1 2,40 3,00
2 2,70 2,80
3 2,60 2,80
4 2,50 2,60
5 2,60 3,00
6 2,40 2,90
7 2,40 3,20
8 2,60 3,00
9 2,50 2,90
10 2,60 2,80 2,53 2,90
Berdasarkan percobaan yang telah dilakukan, forklift dapat berjalan menuju tingkat yang diinstruksikan dengan baik dengan tanpa kesalahan. Waktu rata-rata yang dibutuhkan forklift untuk naik dengan perbandingan beban seberat 500 gram dan tanpa beban akan menghasilkan perbedaan waktu sekitar 0,4 detik.
Dari rata-rata waktu yang ditempuh pada setiap tingkat, maka forklift berjalan dengan kecepatan sebesar 17,27 cm/s.
Rata -rata