Fakultas Ilmu Komputer
Universitas Brawijaya 1915
Sistem Kontrol Kecepatan Motor Berdasarkan Enam Arah Pergerakan Kepala Menggunakan Facial Landmark Mata
Gagana Ghifary Ilham1, Fitri Utaminingrum2
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected]
Abstrak
Penyandang disabilitas adalah orang normal dengan keterbatasan dalam melakukan sesuatu. Salah satu jenis disabilitas yaitu penyandang disabilitas fisik, dimana disabilitas dalam melakukan segala sesuatu masih membutuhkan bantuan orang lain. Alat bantu sangatlah penting dalam persoalan ini karena dapat sangat membantu penyandang disabilitas ini, contoh kursi roda. Pada kursi roda ini dapat memudahkan mobilitas penyandang disabilitas, tapi pada persoalan yang muncul ketika penyandang disabilitas ini tidak sekedar cacat pada kaki melainkan cacat pada tangan juga, sehingga untuk menggunakan kursi roda tersebut secara sendiri akan terasa susah dan masih membutuhkan bantuan dari orang lain. Permasalahan ini sebenarnya bisa diatas dengan menggunakan remote atau joystick agar bisa mengontrol kursi roda tersebut. Penelitian dikerjakan agar dapat membantu penyandang disabilitas fisik terutama pada penyandang disabilitas fisik ganda dan dirancang untuk mendeteksi pergerakan kepala menggunakan pengolahan citra digital dengan menggunakan kamera dan metode facial landmark. Pada pengolahan data pada sistem menggunakan Arduino nano serta pengimplementasi output menggunakan dual motor L293d. Pengujian dilakukan dengan menggunakan 6 orang dengan menggunakan waktu dan jarak yang berbeda dari objek wajah pada masing-masing pergerakan kepala. Hasil tingkat rata-rata akurasi pada pergerakan berdasarkan jarak dan waktu untuk semua subjek pengujian adalah 100%. Sedangkan pada pergerakan mendongak pada waktu malam hari jarak 50 cm dan 30 cm, dan siang hari pada jarak 30 cm juga mendapatkan rata-rata akurasi sebesar 98.75% pada salah satu subjek pengujian. Pengaruh waktu dan jarak sangat penting dalam melakukan penelitian ini.
Kata kunci: disabilitas fisik, pergerakan kepala, dual motor L293d, facial landmark Abstract
Persons with disabilities are normal people with limitations in doing something. One type of disability is a person with a physical disability, while a person with a disability does everything that needs help from others. Wheelchairs, for example wheelchairs. In this wheelchair can facilitate mobility of people with disabilities, but at the time when the compilation of disabled people appears not only defects in the legs due to defects in the hands as well, so to use this wheelchair will also feel difficult and still need help from others. This problem can actually be above by using a remote or joystick in order to control the wheelchair. The research was carried out in order to help people with physical disabilities intended for people with multiple physical disabilities and was designed to utilize head movements using digital image processing using cameras and facial landmark methods. In processing data on the system using Arduino nano and implementing output using dual L293d motor. The test was carried out using 6 people using different times and distances from the face objects on each head movement. The average test result for movement based on distance and time for all test subjects is 100%. Whereas in the movement of looking up at night the distance of 50 cm and 30 cm, and during the day at a distance of 30 cm also get an average gain of 98.75% in one of the test subjects. The effect of time and distance is very important in conducting this research.
Keywords: physical disablity, head movement, dual motor L293d, facial landmark
1. PENDAHULUAN
Tanggal 3 Desember merupakan tanggal
istimewa dimana diperingati hari Penyandang Disabilitas Internasional, dimana di Indonesia sendiri telah mencatatkan sejumlah penyandang
disabilitas di Indonesia mencapai 6.640,000 orang. Jumlah tersebut dapat di perkirakan sudah mulai bertambah banyak pada tahun 2017 (Liputan 6, 2017). Sampai saat ini kesejahteraan bagi penyandang disabilitas di Indonesia belum terpenuhi dengan maksimum, bisa di amati dari aspek pendidikan bahkan akses mereka untuk bergerak dengan mudah.
Menurut Undang-Undang Nomor 4 Tahun 1997 tentang penyandang cacat, penyandang disabilitas itu sendiri dikategorikan menjadi tiga jenis yaitu sebagai berikut, cacat fisik, cacat mental, cacat ganda(cacat fisik dan mental) (Kajian Pustaka, 2018). Pada persoalan ini dimana sebuah alat bantu sangatlah bisa menolong bagi penyandang disabilitas ini.
Contohnya saja kursi roda, dimana kursi roda ini sangat berguna bagi penyandang disabilitas fisik, seperti penyandang disabilitas yang kesulitan berjalan karena keterbatasan meggunakan kaki. Selain keterbatasan dengan menggunakan kaki, penyandang disabilitas juga ada yang kesulitan menggunakan tangan.
Sehingga untuk menggunakan kursi roda secara sendiri, penyandang disabilitas tersebut akan kesusahan dikarenakan kaki dan tangannya tidak berfungsi dengan baik. Hal ini juga terjadi pada kursi roda elektrik, dimana pengguna masih saja kesusahan dalam menggunakan tangan dalam mengendalikan kursi roda tersebut.
Berdasarkan permasalahan diatas, ada penelitian yang ditawarkan agar bisa mengatasi permasalahan diatas oleh (Virza,2018) dengan judul “Pengembangan Sistem Deteksi Gerakan Kepala Sebagai Kontrol Pergerakan Kursi Roda Berbasis Embedded System” menjelaskan bahwa sistem bisa mendeteksi arah gerakan kepala dengan menggunakan 1 buah sensor MPU6050 yang diletakkan pada dahi user dan 2 buah NodeMCU, 1 buah NodeMCU diletakkan dikontroler dan satunya ditaruh di kursi roda selaku server. Implementasi pada hardware MPU6050 diletakkan di depan ikat kepala tepatnya didahi user , seperti bando yang dipasang dikepala. Pada sisi ikat kepala atau bando ini terdapat tempat untuk ditempatkannya powerbank untuk menyuplai daya tegangan sebesar 5V untuk NodeMCU.
Kemudian pada bagian belakang ikat kepala tersebut diletakkan NodeMCU sebagai pemroses data dan ada buzzer yang sedia menerima notifikasi untuk mendeteksi suatu gerakan. Kelemahan dari penelitian Virza adalah implementasi hardware nya harus
dipasang beberapa elektroda dikepala user sehingga sangat tidak praktis dan membuat tidak nyaman pada pengguna.
Oleh karena itu penulis mengusulkan sistem yang praktis dan nyaman dengan saat digunakan oleh user memanfaatkan tekonolgi Computer Vision. Dengan menggunakan kamera webcam logitech C310 Hd, driver motor L293d , Dual motor dan Arduino nano untuk memproses data. Hasil klasifikasi pergerakan berupa 6 pergerakan kepala yang bisa dideteksi yaitu, mendongak, miring kanan sebagian, miring kanan penuh, miring kiri sebagian, miring kiri penuh dan menunduk.
Dengan menggunakan metode facial landmark, dimana metode ini berfungsi untuk mendeteksi disekitar area wajah yang sudah ditandai dengan titik-titik tertentu seperti pada mata, hidung, mulut, dagu, dan lain-lain. Hasil klasifikasi pergerakan-pergerakan kepala diatas akan di implementasikan pada dual motor.
Dimana pergerakan pada dual motor tersebut akan mengikuti arah sesuai pergerakan kepala dari user. Kelebihan dari sistem yang dibuat ini dibandingkan penelitian sebelumnya dalah penelitian ini tidak perlu memakai sensor pada pengguna yang sehingga sangat praktis dan membuat user nyaman, berbeda bila memanfaatkan teknologi Computer Vision maka pengguna cukup menghadapkan kepalanya saja ke arah kamera.
2. PERANCANGAN DAN IMPLEMENTASI 2.1 Facial Landmark
Facial landmark digunakan untuk melokalisasikan area-area pada wajah yang dominan. Contohnya seperti, mata, alis, hidung , mulut, rahang, dan facial landmark ini juga dapat di aplikasikan pada, pencarian wajah, pertukaran wajah, deteksi kedipan pada mata dan masih banyak lagi. Ada jenis pendeteksi landmark pada wajah ini, tetapi semua metode pada dasarnya mencoba melokalisasikan dan memberi label pada area wajah sebagai berikut, mulut, alis kanan, alis kiri, mata kanan, mata kiri, hidung, rahang (Adrian,2017). Cara kerja metode adalah, gambar area wajah tersebut di buat label-label secara manual, dengan menentukan titik koordinat X,Y pada area yang mengelilingi setiap struktur wajah. Dengan pelatihan ada ini bisa memperkirakan posisi wajah langsung
dari intensitas piksel itu sendir, dan hasil akhirya adalah detektor wajah ini mendapatkan akurasi dengan kualitas yang tinggi dan dapat digunakan secara real time.
2.2 Gambaran Umum Sistem
Gambar 1. Diagram Blok Sistem
Pada blok input, mengambil sebuah inputan berupa deteksi kepala pada user. Hasil data tersebut akan diolah pada arduino nano dan driver motor l293d dengan menggunakan image processing serta menggunakan library OpenCV dan menggunakan facial landmark sebagai metode. Kemudian mendeteksi kepala, maka sistem akan menganalisa dengan menggunakan perhitungan trigonometri, hasil trigonometri akan di cocokan dengan sudut pada hasil pergerakan kepala. Kemudian, pada dual motor akan bergerak sesuai data-data pergerakan kepala yang sudah diproses sebelumnya dan hasil outputnya berupa infromasi mengenai pergerakan kepala terhadap arah gerakan dual motor akan ditampilkan di laptop.
2.3 Perancangan Sistem
Perancangan pada perangkat keras terdiri dari pemasangan driver motor L293D arduino nano dan dual motor. Pemasangan driver motor pada pin-pin arduino nano yang sudah ditentukan dan dual motor pada pin-pin driver motor L293D serta satu buah baterai berukuran 9 volt pada driver motor L293D.
Berikut adalah skematik perangkat keras dari sistem dapat dilihat pada gambar gambar 2
Gambar 2. Skematik Perancangan Perangkat Keras
Pada tabel 1, dijelaskan tentang pemasangan masing-masing hardware pada
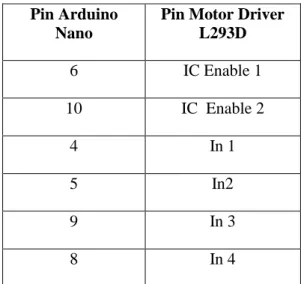
pin-ping yang sudah di tentukan. Pin 6 arduino nano dihubungkan ke pin IC enable 1 driver motor L293d , pin 10 arduino nano dihubungkan ke pin IC enable 2 driver motor L293d, pin 4 arduino nano dihubungkan ke in 1 driver motor L293d, pin 5 dihubungkan ke in 2, pin 9 arduino nano dihubungkan ke in 3 driver motor dan pin 8 dihubungkan ke in 4 arduino nano. Sedangkan pada dual motor dihubungkan ke driver motor L293d, berdasarkan pin-pin yang sudah di tentukan yaitu, pin 1 dari M1 dc motor dihubungkan ke pin IC out 1 dan pin 2 dari M1 dc motor juga dihubungkan ke pin IC out 2. Begitu juga dengan M2 dc motor kedua pinnya yaitu pin 1 dan pin 2 nya di hubungkan ke IC out 3 dan IC out 4 pada driver motor L293D. Sedangkan pada satu buah batterai berukuran 9 volt dihubungkan ke driver motor melalui pin +V motor dan –V negatif.
Tabel 1. Kongfigurasi Pin Arduino Nano dengan Driver Motor L293d
Pin Arduino Nano
Pin Motor Driver L293D
6 IC Enable 1
10 IC Enable 2
4 In 1
5 In2
9 In 3
8 In 4
Gambar 3. Flowchart Perancangan Proses Utama
Pada gambar 3 menjelaskan tentang proses utama pada sistem. Dimana proses awal ialah mencapture video dengan kamera webcam logitech C310 hd dengan warna RGB.
Kemudian sistem akan melakukan mendeteksian terhadap kepala di tandai semacam lingkaran kecil (circle) di kedua mata dengan menggunakan file facial landmark dat.
Setelah itu sistem akan menampilkan informasi tentang nilai koordinat dari kedua mata, perubahan sudut dan hasil data keluaran berupa jenis pergerakan kepala. Hasil sudut didapatkan dengan menggunakan perhitungan trigonometri dengan parameter posisi pada kedua mata.
Setelah itu hasil klasifikasi pergerakan kepala akandiklasifikasikan sebagai nilai output yang akan di gerakkan oleh dual motor.
Gambar 4. Flowchart Perancangan Deteksi Kepala Pada Wajah
Pada Gambar 4 yang berupa tentang pendeteksian kepala, nilai input yang pakai ialah hasil nilai dari pembacaan citra video dalam bentuk RGB sebelumnya.
Kemudian dikonversikan dari RGB ke grayscale. File dat facial landmark ialah file yang berisi informasi landmark tentang titik pada area-area wajah yang sudah ditentukan, seperti pada sistem ini yaitu kedua mata yang menjadi parameter dalam pendeteksian pergerakan kepala ini. File yang berisi informasi itu diekstrak dan posisi kedua mata akan terdeteksi di area wajah. Posisi kedua mata ini ditandai dengan garis seperti lingkaran kecil (circle) di daerah mata dan diberi nama L(left) and R (right) buat masing-masing mata.
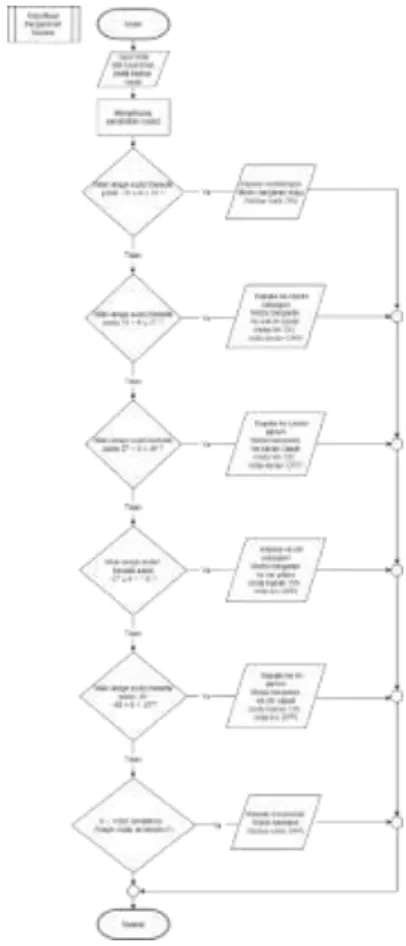
Gambar 5 Flowchart Perancangan Menentukan Klasifikasi Pergerakan Kepala
Pada flowchart yang menentukan hasil klasifikasi pergerakan kepala, dapat dilihat pada gambar 5 dimulai saat nilai titik koordinat pada masing-masingmata sudah diketahui.
Koordinat-koordinat tersebut mempunyai nilai
yang berubah-ubah berdasarkan masing-masing pergerakan kepala yang digerakkan. Dari hasil
nilai-nilai pada koordinat itu maka akan dianalisa untuk perhitungan perubahan sudut dengan menggunakan perhitungan trigonometri.
Setelah di analisa hasil output data berisi informasi tentang klasifikasi pada pergerakan kepala, dimana masing-masing pergerakan kepala tersebut mempunyai nilai range sudut yang sudah ditentukan sebelumnya. Nilai range sudut itu untuk memudahkan dalam mengklasifikasikan tiap pergerakan kepala itu, sehingga dual motor akan langsung bergerak sesuai hasil dari pergerakan kepala tersebut.
mengklasifikasikan tiap pergerakan kepala itu, sehingga dual motor akan langsung bergerak sesuai hasil dari pergerakan kepala tersebut.
Berikut analisa perhitungan sudut sebagai berikut.
1. Koordinat Mata Kanan (R) = ( X(Kolom), Y(Baris) Koordinat Mata Kiri (L) = ( X(Kolom), Y(Baris) ) 2. Koordinat Mata Kanan (R) = (Y(Baris)
) - Koordinat Mata Kiri (L) = (Y(Baris) ) / Koordinat Mata Kanan (R) = (X(Kolom) ) - Koordinat Mata Kiri (L)
= (X(Baris) )
3. Hasil dari pengurangan koordinat dari kedua mata tersebut dibagi (/)
4. Setelah hasil dari perhitungan diatas, maka hasil yang diperoleh dalambentuk Arctg lalu di ubah ke dalam bentuk α Keterangan:
α = Hasil sudut dalam derajat
2.4 Implementasi Sistem
Implementasi perangkat keras ini akan paparkan mengenai wujud jadi hardware dari penelitian ini dapat dilihat pada gambar 6 dan gambar 7
Gambar 6 Implementasi Prototipe Alat Tampak Depan
Gambar 7 Implementasi Prototipe Alat Tampak Samping
Gambar 6 dan 7 merupakan implementasi dari perangkat keras pada penelitian. Dimana kamera webcam logitech c310 hd diletakkan tegak lurus di depan wajah agar mudah terdeteksi oleh sistem yang mana akan langsung dilakukan pendeteksian pada wajah. Kamera dihubungkan melalui port USB pada laptop, sedangkan arduino nano, driver motor l293d dan dual motor di rakit diatas chassis robot agar masing-masing komponen dapat terpasang satu sama lain dengan baik.
Komponen-komponen tersebut terhubung ke laptop melalui kabel USB.
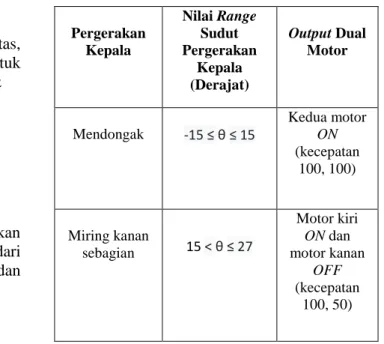
Tabel 2 Klasifikasi Pergerakan Kepala Berdasarkan Output Hasil Data
Pergerakan Kepala
Nilai Range Sudut Pergerakan
Kepala (Derajat)
Output Dual Motor
Mendongak -15 ≤ θ ≤ 15
Kedua motor ON (kecepatan
100, 100)
Miring kanan
sebagian 15 < θ ≤ 27
Motor kiri ON dan motor kanan
OFF (kecepatan
100, 50)
Miring kanan
penuh
27 < θ ≤ 45
Motor kiri ON dan motor kanan
OFF (kecepatan
100, 100)
Miring kiri
sebagian
-27 ≤ θ < -15
Motor kanan ON dan motor kiri
OFF (kecepatan
50, 100)
Miring kiri
penuh -45 ≤ θ < -27
Motor kanan ON dan motor kiri
OFF (kecepatan
100, 100)
Menunduk θ = Tidak Terdefinisi (wajah tidak
terdeteksi)
Kedua roda OFF
Pada tabel 2 menjelaskan, posisi pergerakan kepala mendongak mempunyai nilai range sudut -15 ≤ θ ≤ 15 output yang dihasilkan pada dual motor berupa kedua motor tersebut ON dimana roda dari dual motor itu akan bergerak maju dengan kecepatan 100, 100. Pada posisi miring kanan sebagian mempunyai nilai range sudut 15 < θ ≤ 27 , ouput yang dihasilkan pada dual motor berupa motor motor kiri ON dan motor kanan OFF dimana dual motor akan bergerak ke kanan secara pelan dengan kecepatan 100, 50 pada masing-masing motor.
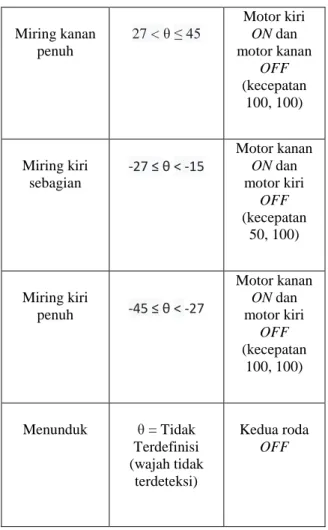
Pada posisi miring kanan penuh mempunyai nilai range sudut 27 < θ ≤ 45 hasil output yang dihasilkan pada dual motor berupa motor kiri ON dan motor kanan OFF dimana dual motor akan bergerak ke kanan secara cepat dengan kecepatan 100, 100 pada masing-masing motor. Pada posisi kiri sebagian mempunyai nilai range sudut -27 ≤ θ < -15 output yang dihasilkan pada dual motor berupa motor kanan ON dan motor kiri OFF dimana dual motor akan bergerak ke kiri secara pelan dengan kecepatan 50, 100 pada masing-masing motor.
Pada posisi miring kiri penuh mempunyai nilai
range sudut -45 ≤ θ < -27 hasil output yang dihasilkan pada dual motor berupa motor kanan ON dan motor kiri OFF dimana dual motor akan bergerak ke kiri secara cepat dengan kecepatan 100, 100 untuk masing-masing motor.
Sedangkan pada posisi menunduk tidak terdefinisi, atau jika wajah tidak terdeteksi.
Output yang dihasilkan pada dual motor berupa kedua motor OFF dimana roda dari dual motor itu akan berhenti. Kecepatan pada dual motor tersebut merupakan kecepatan konstan, yang merupakan kecepatan yang sudah stabil dan sudah di program sebelumnya pada kode program arduino. Maksimal kecepatan yang bisa digunakan oleh driver dual motor ini adalah 200
3. PENGUJIAN DAN HASIL
3.1 Pengujian Tingkat Rata-Rata Akurasi Pada Deteksi Kepala Terhadap Jarak Kamera Ke User (30cm, 40cm, 50cm, 60cm) Dengan Pencahayaan Yang Bervariatif (pagi, siang, dan malam)
Gambar 8. Subjek Pengujian dan Pergerakan Kepala
Pengujian menggunakan dengan 6 subjek dan dilakukan dengan jarak dan waktu yang sudah ditentukan. Pada setiap subjek akan melakukan posisi yang telah ditentukan sesuai pergerakan yaitu mendongak, miring kanan sebagian, miring kanan penuh, miring kiri sebagian, miring kiri penuh dan mendongak.
Pengujian deteksi pada kepala memiliki tingkat akurasi sebesar 100% pada semua subjek, jarak dan waktu.
1 2
3
4
5
6
3.2. PengujianTingkat Rata-Rata Akurasi Masing-Masing Pergerakan Kepala (mendongak, miring kanan sebagian, miring kanan penuh, miring kiri sebagian, miring kiri penuh dan menunduk) Terhadap Jarak Kamera ke user (30m ,40cm, 50cm, 60cm) Dengan Pencahayaan Yang Bervariatif (pagi, siang dan malam)
Hasil pengujian dari masing-masing pergerakan kepala di dapatkan kekuarasian sebesar 100% Sedangkan pada pergerakan mendongak mendapatkan rata-rata persentase sebesar 98.95%, dimana sistem dengan motor saling mengintegrasi satu sama lain dengan baik.
3.3. Pengujian Hasil Integrasi Inputan Kamera Terhadap Masing-Masing Pergerakan Kepala Untuk Pergerakan Motor
Merupakan hasil pengujian pada integrasi sistem dengan semua pergerakan kepala pada user dengan jarak 30cm, 40cm, 50cm, 60cm, dan waktu pagi, siang dan malam. Dimana kecepatan pada dual motor ini sudah konstan atau stabil dan sudah di program sebelumnya kode program arduino nano.
Kecepatan pada dual motor saat maju yaitu 100 untuk motor kiri dan 100 untuk motor kanan, kanan pelan yaitu 100 untuk motor kiri, 50 untuk motor kanan, untuk kanan cepat 100 untuk motor kiri, 100 untuk motor kanan, kiri pelan 50 untuk motor kiri dan 100 untuk motor kanan, kiri cepat yaitu kecepatan motor kiri 100 dan motor kanan cepat, sedangkan untuk berhenti kecepatan motor yaitu 0. Rata-rata persentase paling baik terletak pada pergerakan miring kanan sebagian, miring kanan penuh, miring kiri sebagian, miring kiri penuh dan menunduk yaitu sebesar 100%..
4 KESIMPULAN
Berdasarkan pengujian yang telah dilakukan pada sistem maka terdapat beberapa kesimpulan yaitu:
Persentase tingkat akurasi sistem dalam mendeteksi kepala terhadap jarak jarak dan tipe pencahayaan yang bervariatif sangatlah baik yaitu sebesar 100%. Dimana sistem dengan mudah mendeteksi kepala menggunakan kamera logitech C310 Hd.
Akurasi sistem dalam mendeteksi masing- masing pergerakan kepala sangat di pengaruhi oleh intensitas cahaya, user dan jarak. Rata-rata hasil akurasi yang didapatkan pada posisi mendongak yaitu sebesar 98.95% sedangkan pada posisi menunduk, miring kanan penuh, miring kanan sebagian, miring kiri sebagian, dan miring kiri penuh sebesar 100%.
Hasil integrasi dari inputan kamera terhadap masing-masing pergerakan kepala dengan pergerakan motor bekerja dengan baik, dimana hasil integrasi antara hardware dengan sistem bekerja dengan baik dan mendapatkan nilai akurasi sebesar 100%.
5. DAFTAR PUSTAKA Achmadi, 2019. Lux Meter. [Online]
Available at:
https://www.pengelasan.net/lux-meter/[Diakses 2020].
Adi, P., 2017. Pengolahan Citra Digital.
[Online]
Available at:
https://pemrogramanmatlab.com/2017/
07/26/pengolahan-citra-digital/
[Diakses 2020].
Adrian, R., 2017. Facial landmarks with dlib, OpenCV, and Python. [Online]
Available at:
https://www.pyimagesearch.com/2017/
04/03/facial-landmarks-dlib-opencv- python/
[Diakses 2020].
Advernesia, 2017. |7 Jenis Sudut Tumpul, Lancip, Siku, Refleks, Lurus, 0º, dan Penuh. [Online]
Available at:
https://www.advernesia.com/blog/mate matika/sudut-
tumpul-lancip-siku-siku/
[Diakses 2020].
Anggri, Y., 2017. Mengenal OpenCV (Open Source Computer Vision Library).
[Online]
Available at:
https://devtrik.com/opencv/mengenal- opencv-open-source-computer-vision- library/
[Diakses 2020].
Beetrona, 2020. Belajar Arduino nanp Lengkap berserta Spesifikasinya. [Online]
Available at:
https://beetrona.com/belajar-arduino- nano-lengkap-beserta-spesifikasinya/
[Diakses 2020].
Buysnip, 2020. 2pc Plastic Tire Wheel with Gear Motor Dual Shaft for Arduino Smart Car Robot. [Online]
Available at:
https://buysnip.com/product/2pcs- plastic-tire-wheel-gear-motor-dual- shaft-arduino-smart-car-robot/
[Diakses 2020].
Cylewet, 2016. Cylewet 2Pcs Gear Motor Dual Shaft for Smart Car Robot Arduino (Pack of 2) CYT1037. [Online]
Available at:
https://www.amazon.com/Cylewet- Motor-Shaft-Arduino-
CYT1037/dp/B01N9MS3UZ [Diakses 2020].
Doddy, B., 2017. FUNGSI TRIGONOMETRI
DAN FUNGSI INVERS
TRIGONOMETRI. [Online]
Available at:
https://docplayer.info/29744119-V- fungsi-trigonometri-dan-fungsi-invers- trigonometri.html
[Diakses 2020].
Dwi, S., 2018. Pengertian dan Kegunaan Pengolahan Citra Digital. [Online]
Available at:
https://medium.com/tulisan- ibe/pengertian-dan-kegunaan-
pengolahan-citra-digital-cdf013a39871 [Diakses 2020].
Elektronika, D., 2019. Driver Motor DC
L293D. [Online]
Available at: https://elektronika- dasar.web.id/driver-motor-dc-l293d/
[Diakses 2020].
Ervanda, V., 2018. Pengembangan Sistem Deteksi Gerakan Kepala Sebagai Kontrol Pergerakan Kursi Roda Berbasis Embedded System. Jurnal
dan Ilmu Komputer, Volume Vol. 2, No. 1, Januari 2018, pp. 333-341.
Herwaman, 2019. Pengertian Webcam Berserta Fungsi dan Cara Kerja Webcam.
[Online]
Available at:
https://www.nesabamedia.com/pengerti an-webcam-dan-fungsi-webcam/
Jamilah, M., 2019. Deteksi Gerakan Kepala Berdasarkan Analisis Bounding Box Pada Citra Digital Bagi Penyandang Disabilitas Fisik. Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer, Volume Vol. 3, No. 2, Februari 2019, pp. 1190-1198.
Kajian, P., 2018. Pengertian jenis dan hak penyandang disabilitas. [Online]
Available at:
https://www.kajianpustaka.com/2018/0 7/pengertian-jenis-dan-hak-
penyandang-disabilitas.html [Diakses 2020].
Kusuma, D., 2018. Implementasi Metode Triangle Geometry Untuk Pengenalan Arah Pergerakan Kepala. Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer, Volume Vol. 2, No. 11, November 2018 5285-5293, pp.
5285-5293.
Mughnifar, I., 2020. Pengertian Python,Fungsi , Kelebihan dan Kekurangan. [Online]
Available at:
https://materibelajar.co.id/pengertian- python/
Nickson, J., 2019. Converting RGB image to the Grayscale image in java. [Online]
Available at:
https://medium.com/@himnickson/con verting-rgb-image-to-the-grayscale- image-in-java-9e1edc5bd6e7 [Diakses 2020].
Ono, 2019. 53 Macam – Macam Bahasa Pemrograman dan Fungsinya. [Online]
Available at:
https://dosenit.com/kuliah- it/pemrograman/macam-macam- bahasa-pemrograman
[Diakses 2020].
Putra, A. P., 2019. Impelementasi Deteksi Arah Pergerakan Kepala Sebagi Kendali
Motor Servo Menggunakan Area Mata Facial Landmark. Jember: s.n.
Sinau, A., 2017. Mengenal Arduino Software
(Ide). [Online]
Available at:
https://www.sinauarduino.com/artikel/
mengenal-arduino-software-ide/
[Diakses 2020].
Synced, 2018. OpenCV 4.0 Release Ends 3.5
Year Wait. [Online]
Available at:
https://medium.com/syncedreview/open cv-4-0-release-ends-3-5-year-wait- 6f3619d156f7
[Diakses 2020].