Diajukan Oleh :
Shandy Abrianti NPM. 0734010001
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
melimpahkan segala Karunia-Nya, sehingga dengan segala keterbatasan yang ada baik waktu, tenaga dan pikiran yang di miliki penyusun. Akhirnya penyusun dapat menyelesaikan Skripsi dengan judul “REAKSI ROBOT BERKAKI TERHADAP GELOMBANG SUARA BERBASIS MIKROKONTROLLER AVR ATMega16” dengan tepat waktu.
Pembuatan skripsi ini merupakan syarat akademis yang harus dipenuhi oleh mahasiswa jurusan Teknik Informatika UPN”Veteran” Jawa Timur Surabaya.
Dalam penulisan laporan skripsi ini penulis menyadari telah banyak mendapat bantuan dari berbagai pihak. Baik segi moril maupun materiil. Oleh karena itu, pada kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Prof. Dr. Ir. Teguh Soedarto, MP, Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
2. Bapak Ir. Sutiyono, MT, selaku Dekan Fakultas Teknologi Industri Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya. 3. Bapak Basuki Rahmat, Ssi, MT selaku Ketua Jurusan Teknik Informatika
Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya. 4. Bapak Basuki Rahmat, Ssi, MT dan Bapak Wahyu Syaifullah Jauharis
Arimbi>, Adikku yuda, Nenek, Anti, alm.Angkung, Om Anas, Tante lia, Om adang, Tante yani dan Om atos ) yang telah memberikan dukungan, doa, cinta dan kasih sayangnya atas pengorbanan yang telah beliau berikan.
6. Untuk Keluarga besar H.Kusnadi, SH, M.hum dan Hj.Tatiek, SH ( calon mertua ) yag telah memberikan doa serta panutan untuk penulis pribadi. 7. Yang spesial untuk dr.Tigor Kusdita Kunong yang selama ini memberi
bimbingan, dukungan dan semangat yang sangat besar dalam pengerjaan skripsi ini.
8. Teman-teman penulis : untuk teman-teman seangkatan 2007 , Oshin, Juzz, Cicik, Sofyan, Gibran, Tobib, Faisol, Arif, maz Faisal dan semua teman yang berjasa. Dan semua pihak yang tidak mungkin penulis sebutkan namanya satu per satu.
Penulis menyadari bahwa dalam penulisan laporan skripsi ini masih banyak kekurangan. Oleh sebab itu penulis mengharapkan kritik dan saran yang sifatnya membangun dari pembaca. Semoga laporan ini bermanfaat bagi penulis dan para pembaca.
Surabaya, 13 Maret 2011
KATA PENGANTAR ... ...i
1.1 Latar belakang...1
1.2 Rumusan Masalah ... ...2
1.3 Batasan Masalah ... ...3
1.4 Tujuan Peneletian ... ...3
1.5 Manfaat Penelitian ... ...4
1.6 Metodologi Penelitian ... ...4
1.7 Sistematika Penulisan ...5
BAB II TINJAUAN PUSTAKA ... ...8
2.1 Asal Mula Robot... ... ...8
2.1.1 Tentang Robot...9
2.1.2 Perkembangan Robot...10
2.1.3 Periode Teknologi Robot...12
2.2 Servo HS-311...14
2.2.1 Konstruksi Servo ...15
2.3 Gelombang Suara... ... ...17
2.4 Sensor Suara Mic Condenser...19
2.4.1 Karakteristik Mic Condenser...21
2.5 Transistor BC547...22
2.6 Mikrokontroller AVR...22
2.6.1 Pengenalan Mikrokontroller AVR ATmega16...23
2.6.2 Konfigurasi PIN Mikrokontroler AVR ATMega16...25
2.6.3 Penjelasan Fungsi PIN Mikrokontroller AVR ATMega16...26
2.7.3 C Dan Pemrograman Mikrokontroler AVR AtMega16...34
BAB III ANALISA DAN PERANCANGAN SISTEM...37
3.1 Analisa Sistem...37
3.2 Deskripsi Sistem...38
3.2.1 Blok Diagram Hadware Robot...38
3.2.2 Flowchart Pergerakan Robot...39
3.2.2.1 Penjelasan Skema Flowchart Pada Robot Reaksi Suara...40
3.3 Kebutuhan Perangkat Keras...40
3.4 Rangkaian Elektronik...42
3.5 Bagian Rangkaian Hadware Robot...44
3.6 Kebutuhan Perangkat Lunak...50
3.7 Rangkaian Komponen Dalam PCB...51
3.8 Analisa Perancangan PCB Robot...52
3.9 Analisa Skema Badan Robot...54
BAB IV IMPLEMENTASI PERANCANGAN...56
4.1 Implementasi Perangkat Keras...56
4.1.1 Cara Merancang Robot...56
4.2 Perancangan Jalur PCB (Printed Circuited Onboard)... 57
4.3 Perancangan Kerangka Kaki Robot... 59
4.4 Implementasi Perangkat Lunak... 68
4.4.1 Proses Pemasangan... 68
4.5 Implementasi Coding...74
BAB V UJI COBA DAN EVALUASI...77
5.1 Pengujian Alat Secara Keseluruhan...77
5.2 Pengujian Robot Pada Keadaan Ramai Suara...80
5.3 Pengujian Robot Suara Menggunakan Pluit...81
Gambar 2.1 Robot Berkaki 6 Crawler (tampak depan)...11
Gambar 2.2 Robot Berkaki 6 Crawler (tampak samping)...11
Gambar 2.3 Model Servo HS-311 ... ..15
Gambar 2.4 Bagan Servo HS-311 ... ..16
Gambar 2.5 Rumus Gelombang Suara ... ..17
Gambar 2.6 Gelombang Transversal...18
Gambar 2.7 Gelombang Longitudinal...18
Gambar 2.8 Electric Condenser Microphone...19
Gambar 2.9 Bagan MIC Condenser...21
Gambar 2.10 Transistor BC547...22
Gambar 2.11 Mikrokontroller AVR ATmega 16...24
Gambar 2.12 Konfigurasi Kaki Mikrokontroller AVR ATmega 16 ... ...25
Gambar 2.13 Blok Diagram AVR ATmega 16...29
Gambar 2.14 Arsitektur Mikrokontroller AVR Atmega 16...30
Gambar 2.15 Struktur Dari Program C...32
Gambar 3.1 Desain Robot 6 Kaki Crawler...37
Gambar 3.2 Blok Diagram...38
Gambar 3.3 Flowchart Jalannya Robot... .... ..39
Gambar 3.4 Macam-macam Jenis Resistor...42
Gambar 3.5 Rangkaian Kaki-kaki Robot...44
Gambar 3.6 Jenis Dan Ukuran Kaki Robot...45
Gambar 3.7 Jenis Mur Dan Baut...46
Gambar 3.8 Komponen Penyambung Kaki Robot...47
Gambar 3.9 Servo Pada Rangka Robot...48
Gambar 3.10 Komponen Penyambung Kaki Robot...49
Gambar 3.11 Rangkaian Komponen Lengkap Pada PCB...51
Gambar 3.12 Skematik PCB Tampak Dari Atas...52
Gambar 3.13 Rangkaian Elektronika Robot...53
Gambar 4.4 Tahapan Ketiga Kaki Robot...61
Gambar 4.5 Tahapan Keempat Kaki Robot...61
Gambar 4.6 Tahapan Kelima Kaki Robot...62
Gambar 4.7 Tahapan Keenam Kaki Robot...62
Gambar 4.8 Tahapan Ketujuh Kaki Robot...63
Gambar 4.9 Tahapan Kedelapan Kaki Robot...63
Gambar 4.10 Tahapan Pertama Pemasangan Kaki Robot ke Servo...64
Gambar 4.11 Tahapan Kedua Pemasangan Kaki Robot ke Servo...64
Gambar 4.12 Tahapan Ketiga Pemasangan Kaki Robot ke Servo...65
Gambar 4.13 Tahapan Keempat Pemasangan Kaki Robot ke Servo...65
Gambar 4.14 Tahapan Kelima Pemasangan Kaki Robot ke Servo...66
Gambar 4.15 Tahapan Keenam Pemasangan Kaki Robot ke Servo...66
Gambar 4.16 Tahapan Ketujuh Pemasangan Kaki Robot ke Servo...67
Gambar 4.17 Tahapan Kedelapan Pemasangan Kaki Robot ke Servo...67
Gambar 4.18 Tahapan Kesembilan Pemasangan Kaki Robot ke Servo...68
Gambar 4.19 Langkah Kesatu Instal Program...69
Gambar 4.20 Langkah Kedua Instal Program...69
Gambar 4.21 Langkah Ketiga Instal Program...70
Gambar 4.22 Langkah Keempat Instal Program...70
Gambar 4.23 Langkah Kelima Instal Program...71
Gambar 4.24 Langkah Keenam Instal Program...71
Gambar 4.25 Langkah Ketujuh Instal Program...72
Gambar 4.26 Pembuatan Program...72
Gambar 4.27 Run/Compile Program...73
Gambar 4.28 Compile Program...73
Gambar 5.1 Robot Menyala Dan Siap Melaju Jalan...78
Gambar 5.2 Robot Melaju Lurus Kedepan...79
Tabel 2.2 Fungsi Khusus Port B ... 26
Tabel 2.3 Fungsi Khusus Port C ... 27
Penyusun : Shandy Abrianti
Pembimbing I : Basuki Rahmat, S.Si., MT
Pembimbing II : Wahyu syaifullah jauharis saputra, S.Kom
ABSTRAK
Dalam perkembangannya teknologi dan dunia pengetahuan mengalami perubahan yang begitu cepat sehingga dimana peran manusia telah banyak digantikan dengan mesin ataupun robot dalam mengerjakan suatu pekerjaan. Manusia mencari inovasi baru dalam segi mekanisme robot sebagai bahan edukasi dan juga fungsional yang dapat menunjang kehidupan manusia, salah satunya adalah membuat robot kaki. Robot kaki ini memanfaatkan basis mikrokontroller yang dapat mengkontrol kinerja robot.
Pada penelitian tugas akhir ini, akan dilakukan pembuatan Robot Berkaki yang dapat bereaksi terhadap Gelombang Suara Berbasis Mikrokontroller AVR ATMega16. Sebagai tahap awal pembuatan adalah pengumpulan data/ literatur tentang servo, dan reaksi yang dihasilkan melalui gelombang suara yang dirambatkan melalui tegangan. Kemudian dibuatlah sebuah analisa dan perancangan bangun untuk robot 6 kaki. Bahasa pemrograman yang di pakai adalah bahasa C.
Dengan adanya penelitian ini diharapkan dapat menunjang edukasi dalam perancangan dan pemahaman konsep robot kaki. Serta dapat menjadi pembelajaran yang menyenangkan bagi para pecinta robot dan kalangan umum.
1.1 Latar belakang
Dalam perkembangan teknologi yang semakin pesat khususnya kemajuan di dunia elektronika dan komputer menyebabkan banyak di hasilkannya suatu penemuan-penemuan yang dianggap baru sehingga dapat berguna bagi kehidupan manusia. Dimana sekarang peran manusia perlahan-lahan mulai digantikan oleh mesin ataupun robot dalam mengerjakan suatu pekerjaan. Sulitnya membuat robot dan mahalnya IC yang bisa di dapat dalam perancangan robot, membuat tertantangnya penulis dalam mengambil judul skripsi mengenai robot. Robot pun dapat dijadikan bahan penelitian dan pembelajaran edukasi tinggi serta menarik utuk menunjang pengetahuan yang lebih baik dari jaman ke jaman.
(hanya satu program saja yang dapat disimpan). Pemrograman I/O pada mikrokontroller merupakan dasar dari prinsip pengontrolan berbasis mikrokontroller, dimana orientasi dari penerapan mikrokontroller ialah untuk mengendalikan suatu sistem berdasarkan input yang diterima, lalu diproses oleh mikrokontroller dan dilakukan aksi pada bagian output sesuai program yang telah ditentukan sebelumnya. Pada metode ini dipilih pemrograman bahasa C, karena dinilai sangat kompetibel
dalam pemrograman mesin.
1.2 Rumusan Masalah
Berdasarkan uraian dari dari latar belakang permasalahan maka perlu adanya pembahasan yang sistematis dan objektif, maka permasalahan dapat dirumuskan sebagai berikut :
a. Bagaimana cara merakit robot berkaki enam menggunakan media sensor suara berupa mic condenser?
b. Bagaimana merancang/mendesain robot berkaki yang dapat
dikembangkan sebagai media pembelajaran robot yang menarik?
Dalam penyusunan tugas akhir ini, untuk mengatasi permasalahan yang ada maka penulis membatasi permasalahan sebagai berikut.
a. Dalam perangkat lunak, bahasa program yang di gunakan adalah bahasa C sebagai operasional mikrokontroller.
b. Robot ini menggunakan mikrokontroller AVR Atmega16 dengan 2 servo seri HS-311.
c. Robot ini menggunakan sensor suara Mic Condenser.
d. Robot bergerak hanya sebatas gerak maju dan gerak kekanan. Dan juga tidak bisa untuk menaiki atau menuruni tangga.
e. Hanya dapat menangkap perintah dengan volume suara keras dan dalam keadaan sunyi. Karena jika volume suara melemah maka robot tidak dapat menangkap perintah.
1.4 Tujuan Penelitian
Adapun tujuan dari penelitian Skripsi “Reaksi Robot Berkaki Terhadap Gelombang Suara Berbasis Mikrokontroller AVR ATmega16, antara lain : a. Menciptakan serta merancang sistem robot berkaki enam jenis crawler
yang dapat bergerak maju dan berbelok arah ke kanan jika mendengar suara/bunyi disekitarnya.
Universitas Pembangunan Nasional “veteran” Jatim.
1.5 Manfaat Penelitian
Manfaat yang dapat diambil dari Tugas Akhir ini adalah diharapkan untuk kedepannya semua tentang Robotika di Indonesia ini khususnya di Universitas Pembangunan Nasional ”veteran” Jatim, dapat semakin maju dan terus berkembang seiring dengan perkembangan teknologi khususnya dalam bidang Robotika, dan terbukanya ide-ide yang brilian dikalangan mahasiswa UPN dalam bidang Robotika.
1.6 Metode Penelitian
Metode yang dilaksanakan dalam penelitian ini adalah sebagai berikut :
a. Studi Literatur
Pada tahap ini dilakukan pemahaman kepustakaan yang berhubungan dengan pembuatan perangkat lunak secara umum, Kepustakaan yang berhubungan dengan robot itu sendiri, serta literatur tentang hardware yang diperlukan.
b. Desain sistem
tersebut.
c. Implementasi
Pada tahap ini dilakukan implementasi rancangan sistem yang telah dibuat. Tahapan ini merealisasikan apa yang terdapat pada tahapan sebelumnya menjadi sebuah aplikasi yang sesuai dengan apa yang direncanakan.
d. Uji Coba dan Evaluasi
Pada tahap ini dilakukan ujicoba terhadap sistem yang dibuat, tujuannya untuk menemukan kesalahan-kesalahan yang mungkin terjadi serta melakukan perbaikan untuk lebih menyempurnakan sistem yang dibuat. e. Penyusunan laporan tugas akhir
Tahap ini dilakukan untuk membuat laporan dari semua dasar teori dan metode yang digunakan serta hasil-hasil yang diperoleh selama pengerjaan tugas akhir.
1.7 Sistematika Penulisan
Sistematika Penulisan yang digunakan dalam Tugas Akhir ini adalah sebagai berikut :
BAB I PENDAHULUAN
Membahas tentang teori penunjang dari pembahasan masalah antara lain tentang komponen-komponen yang digunakan dalam pembangunan sistem yang dibangun.
BAB III ANALISIS DAN PERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan robot berkaki tipe crawler yang menggunakan mikrokontoller AVR ATmega16, dua buah servo HS-311, sensor suara MIC CONDENSER, serta delay timer sebagai pelengkap indikator. Sedangkan Bahasa Pemograman C sebagai operasional mikrokontroller AVR ATmega16.
BAB IV IMPLEMENTASI SISTEM
Bab ini berisi hasil implementasi dari perancangan aplikasi yang telah dibuat sebelumnya beserta pembahasan dari robot berkaki enam tipe crawler yang menggunakan mikrokontoller AVR ATmega16.
BAB V UJI COBA DAN EVALUASI
Bab ini akan menjelaskan tentang Kesimpulan dari keseluruhan isi dari laporan dan Tugas Akhir serta saran-saran untuk pengembangan lebih lanjut.
DAFTAR PUSTAKA
8
2.1 Asal mula Robot
Sejak kapan manusia mengenal robot? Kata robot pertama kali diperkenalkan
oleh seorang penulis dari Czech (ceko) yang bernama Karel pada tahun 1921. Kata
Robot berasal dari kata ‘robota’ yang berarti: pekerja sendiri [1].
Pada tahun 1920 robot mulai berkembang dari disiplin ilmu elektronika, lebih
spesifiknya pada cabang kajian disiplin ilmu elektronika yaitu teknik kontrol
otomatis, tetapi pada masa-masa itu komputer yang merupakan komponen utama
pada sebuah robot yang digunakan untuk pengelolaan dan masukan dari sensor
karena kendali aktuator belum memiliki kemampuan komutasi yang cepat selain
ukuran fisik komputer pada masa itu masih cukup besar
Terinspirasi pada cerpen Runaround, Joseph Weizenbaum, seorang profesor
di Institut Massachusetts, membuat program Eliza pada tahun 1966. Ada sekitar 240
baris kode yang dibuat oleh Weizenbaum untuk mensimulasikan sebuah
psikotherapy. Ternyata bukan hanya Prof. Weizenbaum saja yang terobsesi dengan
cerpen Runaround hasil karya Asimov itu. Sepuluh tahun sebelum Prof. Weizenbaum
membahas tentang pembuatan robot berdasarkan ide cerita dari cerpen Runaround
tersebut. Mereka berdua selanjutnya mendirikan perusahaan yang diberi nama
Unimation, singkatan dari istilah Universal Automation. Unimation menjadi
perusahaan pertama di dunia yang menghasilkan robot secara komersial. Bahkan
kabarnya perusahaan ini sampai sekarang masih terus berproduksi [2].
2.1.1 Tentang Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik
menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program
yang telah didefinisikan terlebih dulu (kecerdasan buatan). Suatu mesin dikatakan
sebagai robot jika mesin tersebut dapat diprogram untuk melakukan suatu aktivitas
tertentu dan pemrograman bisa dilakukan berulang-ulang (re-programmable),
kemudian mesin mampu mengekstrak informasi dari lingkungannya dan
menggunakan pengetahuan tentang lingkungannya untuk beraksi secara aman dengan
cara yang sesuai yang diinginkan oleh pemrogrammnya, bersifat otomatis atau
mampu beroperasi tanpa supervisi langsung dari manusia, memiliki bagian yang
disebut manipulator yang terdiri dari link (rangka – seperti tulang pada tubuh
manusia) dan joint (engsel – penghubung antar link).
Selain itu mesin tersebut memiliki unjuk kerja seperti Resolusi atau perubahan
gerak terkecil yang dapat diperintahkan oleh sistem kontrol pada lingkup kerja
diketahui. Untuk pertama kalinya robot-robot sengaja dibuat karena beberapa hal
yang sangat penting, antara lain :
a. Untuk meningkatkan produksi melalui otomasi di industri.
b. Menciptakan tenaga kerja yang berkinerja tinggi dan dapat bekerja 24
jam.
c. Untuk menjalankan pekerjaan yang memerlukan ketelitian tinggi.
d. Menggantikan manusia dalam pekerjaan yang bersifat selalu
berulang-ulang.
e. Sebagai alat bantu manusia dalam melakukan eksperimen ilmiah di luar
angkasa.
f. Untuk dapat bekerja pada tempat yang berbahaya bagi manusia (daerah
radio aktif, daerah dengan tekanan udara maupun air yang tinggi, dekat
dengan bahan kimia berbahaya, dll).
g. Sebagai media entertainment (hiburan) bagi manusia.
h. Sebagai penyalur hobby
2.1.2 Perkembangan Robot
Ketika para pencipta robot pertama kali mencoba meniru manusia dan hewan,
mereka menemukan bahwa hal tersebut sangatlah sulit, karena membutuhkan tenaga
dan penghitungan yang jauh lebih banyak dari yang tersedia pada masa itu. Jadi,
penekanan perkembangan diubah ke bidang riset lainnya. Robot sederhana beroda
perencanangan jalur. Teknik navigasi tersebut telah berkembang menjadi sistem
kontrol robot otonom yang tersedia secara komersial.
Ketika para teknisi siap untuk mencoba robot berjalan kembali, mereka mulai
dengan heksapoda dan platform/crawler berkaki banyak lainnya. Robot-robot tersebut
meniru serangga dan arthropoda dalam bentuk dan fungsi. Trend menuju jenis badan
tersebut menawarkan fleksibilitas yang besar dan terbukti dapat beradaptasi dengan
berbagai macam lingkungan. Dengan lebih dari empat kaki, robot-robot ini stabil
secara statis yang membuat mereka bekerja lebih mudah. Berikut desain robot
berkaki 6 tipe crawler pada Gambar 2.1 dan Gambar 2.2.
Gambar 2.1 Robot Berkaki 6 Crawler (tampak depan)
Meskipun ada sebagian yang mungkin tidak bisa didefinisikan sebagai robot,
tapi hasil-hasil penciptaan yang disusun berdasarkan urutan kurun waktu dibawah ini
dianggap sebagai perkembangan dari cikal bakal teknologi robot, diantaranya adalah.
a. Tahun 270 sebelem masehi, Ctesibus, pada jaman Yunani kuno telah
membuat organ-organ dan jam air yang dapat membuat gerakan-gerakan
tertentu.
b. Tahun 1818, Mary Shelley menulis novel "Frankenstein" yang terkenal
dan menyeramkan itu. Cerita tentang manusia yang diciptakan oleh Dr
Frankenstein.
c. Tahun 1921, Istilah "robot" pertama kali digunakan dalam sebuah drama
berjudul "RUR" atau "Rossum's Universal Robot" yang ditulis oleh
penulis dari Ceko, Karel Capek. Secara sederhana drama ini
mengkisahkan tentang manusia yang membuat robot dan pada akhirnya
robot itu membunuh manusia yang membuatnya.
d. Tahun 1941, penulis fiksi ilmiah Isaac Asimov pertama kali menggunakan
kata "robot" untuk menggambarkan teknologi robot dan meramalkan
munculnya robot industri yang kuat.
e. Tahun 1942, Asimov menulis "Runaround", cerita tentang robot dan
memperkenal "Tiga Hukum Robot".
f. Tahun 1948, “Cybernetics", sebuah hasil tulisan tentang pengaruh pada
kecerdasan buatan yang diterbitkan oleh Norbert Wiener. Pada masa itu
menciptakan robot sederhana yang diberi nama Elmer dan Elsie yang
meniru perilaku manusia hidup dengan menggunakan elektronik.
g. George Devol dan Joseph Engleberger menciptakan robot lengan yang
diprogram untuk pertama kalinya dan menciptakan istilah Universal
Otomasi untuk pertama kalinya juga.
h. Tahun 1956, George Devol dan Joseph Engelberger membentuk
perusahaan penghasil robot pertama di dunia. Pada tahun ini juga sebuah
robot elektronik berbentuk tupai dan diberi nama Squee diciptakan.
i. Tahun 1959, Computer Assisted Manufacturing telah didemonstrasikan di
Laboratorium Servomechanisms di MIT.
j. Tahun 1961, robot industri pertama diperagakan di pabrik mobil General
Motors di New Jersey. Robot itu dinamakan UNIMATE.
k. Tahun 1963, robot lengan buatan yang dikontrol oleh komputer pertama
kali dirancang. Lengan (tangan) robot ini dirancang sebagai alat bagi
penyandang cacat dengan kelengkapan enam sendi yang memberikan
fleksibilitas lengan manusia.
l. Tahun 1965, pembuatan sistem canggih yang pertama dan disebut
DENDRAL. Program ini dirancang untuk melaksanakan akumulasi
pengetahuan dari subjek ahli.
m. Tahun 1968, Marvin Minsky membuat lengan tentakel yang dinamakan
n. Tahun 1969, pembuatan lengan Stanford yang digerakkan oleh tenaga
listrik. Lengan robot ini dikendalikan oleh komputer.
o. Tahun 1970, kemunculan robot Shakey yang disebut-sebut sebagai mobile
robot yang pertama yang dikendalikan oleh kecerdasan buatan. Robot ini
dibuat oleh SRI International.
p. Tahun 1974, perancangan lengan robot yang bekerja berdasarkan umpan
balik dan sensor tekanan. Robot yang disebut dengan nama Silver Arm ini
digunakan untuk perakitan komponen-komponen di bidang industri.
q. Tahun 1979, pertama kalinya didemonstrasikan kemampuan sebuah robot
yang berlalu lalang di dalam sebuah ruangan yang penuh dengan kursi.
Robot yang diberi nama Stanford ini dapat menghindari menabrak
kursi-kursi yang diletakkan secara acak di ruangan tersebut. Robot ini
dilengkapi dengan kamera yang menyampaikan gambar medan laluan ke
komputer. Selanjutnya komputer memperhitungkan jarak benda dan
hambatan yang ada pada medan [2].
2.2 Servo HS-311
Servo/aktuator adalah perangkat sejenis motor yang dapat diputar dalam
besaran sudut tertentu yang diinginkan. Servo dapat membuat kaki robot bergerak
memutar maupun naik turun. Gerak servo yang diinginkan diatur melalui program
code vision, pesan dari gerak kaki tersebut disampaikan melalui driver servo yang
cukup besar. Alasannya klasik, harganya cukup ekonomis untuk kemampuannya
yang rata-rata. Servo ini dapat bergerak dari 0° sampai 180° dengan pulsa antara 600
usec to 2400 usec. Berikut desain servo HS-311 pada Gambar 2.3.
a
b
Gambar 2.3 Model Servo Robot Berkaki
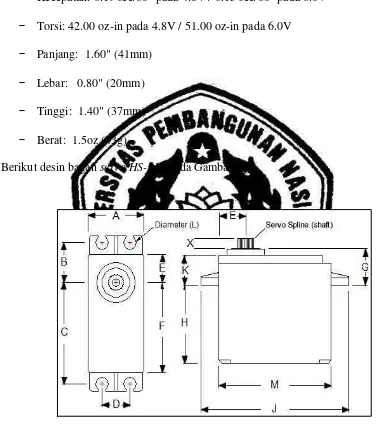
2.2.1 Konstruksi Servo
Servo motor standar dilengkapi dengan motor DC untuk mengendalikan posisi
sebuah robot. Rotor motor dapat diputar/diposisikan hingga 180 derajat. Servo terdiri
motor DC, gear dan driver. Karena sudah ada driver maka dapat langsung
(vcc+ground), yang satu untuk kendali yang dihubungkan ke mikro [3].
Spesifikasinya antara lain :
− Kecepatan: 0.19 sec/60° pada 4.8V / 0.15 sec/60° pada 6.0V
− Torsi: 42.00 oz-in pada 4.8V / 51.00 oz-in pada 6.0V
− Panjang: 1.60" (41mm)
− Lebar: 0.80" (20mm)
− Tinggi: 1.40" (37mm)
− Berat: 1.5oz (43g)
Berikut desin bagan servo HS-311 pada Gambar 2.4.
Gelombang suara adalah getaran yang merambat gerakan bolak-balik yang
ada di sekitar titik keseimbangan di mana kuat lemahnya dipengaruhi besar kecilnya
energi yang diberikan. Di dalam perambatannya tidak diikuti oleh berpindahnya
partikel-partikel perantaranya. Pada hakekatnya gelombang merupakan rambatan
energi (energi getaran) [4]. Beberapa karakteristik khusus gelombang, yaitu :
a. Jika melewati batas antara dua medium akan mengalami pemantulan dan
pembiasan.
b. Jika melewati suatu halangan (misalnya celah sempit) maka ia akan
mengalami difraksi (lenturan).
Persamaan penjalaran gelombang, Rumusnya ada pada Gambar 2.5 :
y = A sin (kx ± ωt)
Keterangan :
A = Amplitudo Amplitudo
k = 2π / λ (k = bilangan gelombang)
λ = Panjang Panjang gelombang
ω = 2π f = Frekuensi anguler
Tipe gelombang dibagi menjadi 2 bagian, yaitu :
a. Gelombang Transversal
Adalah arah gerak medium ⊥ arah gerak gelombang. Contoh : gelombang
Gambar 2.6 Gelombang Transversal
b. Gelombang Longitudinal
Adalah Arah gerak medium / arah gerak gelombang. Berikut design
gelombang longitudinal pada Gambar 2.7. Contoh : gelombang bunyi,
gelombang pada pegas.
Gambar 2.7 Gelombang Longitudinal
Sensor suara adalah sensor yang cara kerjanya merubah besaran suara menjadi
besaran listrik, dan dipasaran sudah begitu luas penggunaannya. Salah satu komponen
yang termasuk dalam Sensor suara yaitu electric condenser microphone atau mic
kondenser.
ECM atau Electric Condenser Microphone atau biasa juga disebut mic
kondenser adalah microphone yang terbuat dari lempeng konduktor tipis membentuk
sebuah kapasitor yang dapat berubah-ubah nilai kapasitasnya sesuai dengan getaran
suara yang diterima. Jenis microphone ini bentuknya bisa sangat kecil (sekitar
5-3mm).
Mic Condenser bersifat mendeteksi sinyal suara dan menghasilkan sinyal
elektrik berupa tegangan atau arus yang proporsional terhadap sinyal suara [5].
Berikut desain sensor suara Mic Condenser pada Gambar 2.8.
b
Gambar 2.8 Electric Condenser Microphone
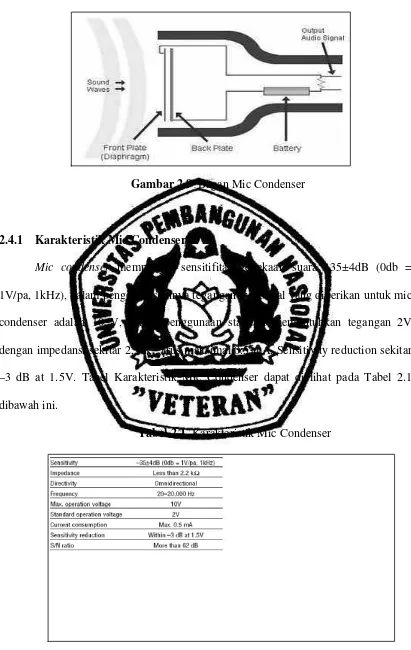
Condenser berarti kapasitor, komponen elektronika yang menyimpan energi
dalam bentuk medan elektrostatik. Microphone condenser memerlukan power dari
batere atau suplai eksternal. Sinyal audio yang dihasilkan oleh tipe ini lebih kuat
dibandingkan dengan tipe yang lainnya.
Condenser juga lebih sensitif dan responsif sehingga tepat digunakan untuk
mengambil perbedaan pada suara. Namun tipe ini tidak cocok digunakan pada
volume tinggi karena senstifitasnya membuat mudah terdistorsi [6]. Berikut desain
Gambar 2.9 Bagan Mic Condenser
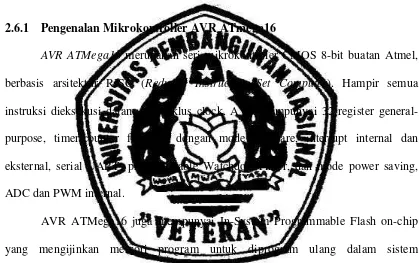
2.4.1 Karakteristik Mic Condenser
Mic condenser mempunyai sensitifitas kepekaan suara –35±4dB (0db =
1V/pa, 1kHz), dalam pengoperasiannya tegangan maksimal yang diberikan untuk mic
condenser adalah 10 V, dalam penggunaan standart membutuhkan tegangan 2V
dengan impedansi sekitar 2,2 K , arus maksimal 0.5 mA, Sensitivity reduction sekitar
–3 dB at 1.5V. Tabel Karakteristik Mic Condenser dapat di lihat pada Tabel 2.1
dibawah ini.
2.5 Transistor BC547
Transistor adalah komponen elektronika multitermal, biasanya memiliki 3
terminal. Secara harfiah, kata Transistor berarti “Transfer resistor”, yaitu suatu
komponen yang nilai resistansimantara terminalnya dapat diatur. Secara umum
transistor terbagi dalam 3 jenis :
1. Transistor Bipolar
2. Transistor Unipolar
3. Transistor Unijunction
Dalam pembuatan Robot Berkaki ini, Saya menggunakan tipe Transistor BC547
seperti Gambar 2.10.
Gambar 2.10 Transistor BC547
2.6 Mikrokontroler AVR
Mikrokontroler AVR (Alf dan Vegard’s Risc processor) standar memiliki 8
bit, dimana semua instruksi dikemas dalam kode 16-bit, dan sebagian besar instruksi
dieksekusi dalam 1 (satu) siklus clock. AVR berteknologi RISC (Reduced Instruction
kompleksitas mode pengalamatannya, sedangkan arsitektur AVR sendiri awalnya
dibuat oleh 2 orang mahasiswa di Norwegian Institute of Technology yaitu Alf-Egil
Bogen dan Vegard Wollan yang selanjutnya dikembangkan oleh perusahaan Atmel di
Norwegia dan AVR dapat dikelompokkan menjadi empat kelas, yaitu Altiny
(keluarga ATSOSxx, ATMega, dan AT86RFxx).
2.6.1 Pengenalan Mikrokontroller AVR ATmega16
AVR ATMega16 merupakan seri mikrokontroler CMOS 8-bit buatan Atmel,
berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua
instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register
general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan
eksternal, serial UART, programmable Watchdog Timer, dan mode power saving,
ADC dan PWM internal.
AVR ATMega16 juga mempunyai In-System Programmable Flash on-chip
yang mengijinkan memori program untuk diprogram ulang dalam sistem
menggunakan hubungan serial SPI ATMega16. ATMega16 mempunyai throughput
mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi
daya versus kecepatan proses. Berikut design Mikrokontroller AVR ATmega16 pada
Gambar 2.11 Mikrokontroler AVR ATmega16
Pengembangan sebuah sistem menggunakan mikrokontroller AVR buatan
ATMEL menggunakan software CodeVisonAVR. CodeVision AVR merupakan
software C-cross compiler, dimana program dapat ditulis dalam bahasa C.
AVR Studio 4 memiliki IDE (Integrated Development Environment) yang
lengkap, dimana menulis program, compile, link, pembuatan kode bahasa C dan
download program ke chip AVR dapat dilakukan pada codevision, selain itu ada
fasilitas terminal yaitu untuk melakukan komunikasi serial dengan mikrokontroller
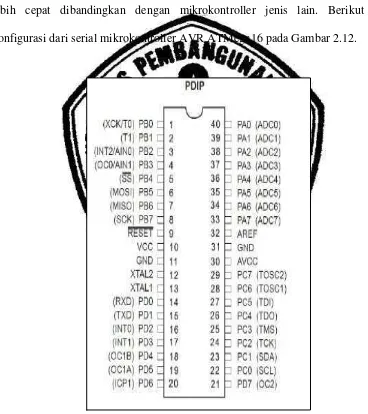
2.6.2 Konfigurasi PIN Mikrokontroler AVR ATMega16
Konfigurasi pin ATmega16 dengan kemasan 40 pin DIP (Dual Inline
Package). AVR memiliki keunggulan dibandingkan dengan mikrokontroller lain,
keunggulan mikrokontroller AVR yaitu : AVR memiliki kecepatan eksekusi program
yang lebih cepat karena sebagian besar instruksi dieksekusi dalam 1 siklus clock,
lebih cepat dibandingkan dengan mikrokontroller jenis lain. Berikut design
konfigurasi dari serial mikrokontroller AVR ATMega16 pada Gambar 2.12.
2.6.3 Penjelasan Fungsi PIN Mikrokontroller AVR ATMega16 Fungsi PIN Mikrokontroller AVR ATMega16 tipe PDIP :
a. Vcc : Merupakan pin yang berfungsi sebagai catu daya.
b. GND : Merupakan pin Ground (penghantar arus listrik).
c. Port A (PA0..PA7) : Merupakan pin input / output dua arah dan pin
masukan ADC.
d. Port B (PB0..PB7) : Merupakan pin input / output dua arah dan pin
fungsi khusus, seperti dapat dilihat pada table di
bawah ini.
OC0 (Timer/Counter0 Output Compare Match Output)
PB2 AIN0 (Analog Comparator Positive Input)
PB1 T1 (Timer/Counter0 External Counter Input)
PB0 T0 T1 (Timer/Counter0 External Counter Input)
XCK (USART External Clock Input/Output)
e. Port C (PC0..PC7) : Merupakan pin input/output dua arah dan pin
fungsi khusus, seperti dapat dilihat pada tabel
dibawah ini.
Tabel 2.3 Fungsi Khusus Port C
Pin Fungsi Khusus
PC7 TOSC2 (Timer Oscillator Pin2)
PC6 TOSC1 (Timer Oscillator Pin1)
PC5 TDI (JTAG Test Data In)
PC4 TDO(JTAG Test Data Out)
PC3 TMS (JTAG Test Mode Select)
PC2 TCK (JTAG Test Clock)
PC1 SDA (Two-wire Serial Bus Data Input/Output Line)
f. Port D (PD0..PD7) : Merupakan pin input/output dua arah dan pin
khusus, seperti dapat dilihat pada tabel
dibawah ini.
Tabel 2.4 Fungsi Khusus Port D
Pin Fungsi Khusus
PD7 OC2 (Timer/Counter2 Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output)
PD4 OC1B(Timer/Counter1 Output Compare B Match Output)
Dari penerangan tiap fungsi PIN yang ada pada Mikrokontroler AVR
ATMega16 menjelaskan adanya Bagan Rancangan Blok Diagram. Design bagan
rancangan blok diagram dapat dilihat pada Gambar 2.13.
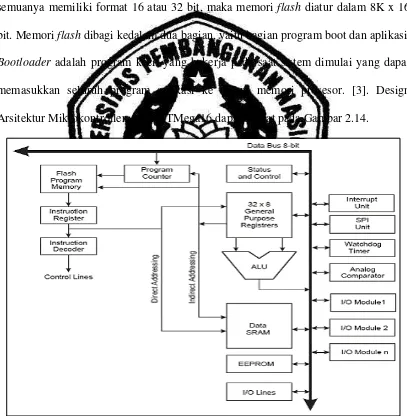
2.6.4 Memori Program ATMega16
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data dan
memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk
menyimpan data. ATMega16 memiliki 16K byte On-chip In-System
Reprogrammable Flash Memory untuk menyimpan program. Instruksi ATMega16
semuanya memiliki format 16 atau 32 bit, maka memori flash diatur dalam 8K x 16
bit. Memori flash dibagi kedalam dua bagian, yaitu bagian program boot dan aplikasi.
Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang dapat
memasukkan seluruh program aplikasi ke dalam memori prosesor. [3]. Design
Arsitektur Mikrokontroller AVR ATMega16 dapat dilihat pada Gambar 2.14.
2.7 Konsep Pemprograman Bahasa C
Merupakan suatu bahasa pemrograman “general-purpose”, yang artinya tidak
di tujukan untuk menyelesaikan suatu masalah tertentu. Bahasa ini mempunyai
syntax yang padat dan rapi serta mempunyai eksekusi yang efisien sehingga popular
sebagai bahasa pemrograman sistem.
Sampai saat ini, bahasa C telah berhasil digunakan untuk mengembangkan
berbagai jenis permasalahan pemrograman, dari level operating sistem (unix, linux,
ms dos, dsb), aplikasi perkantoran (text editor, word processor, spreadsheet, dsb),
bahkan sampai pengembangan sistem pakar (expert system). Kompiler C juga telah
tersedia di semua jenis platform komputer, mulai dari Macintosh, UNIX, PC, Micro
PC, sampai super komputer.
C bisa disebut bahasa pemrograman tingkat menengah (middle level
programming language). Arti tingkat (level) disini adalah kemampuan mengakses
fungsi-fungsi dan perintah-perintah dasar bahasa mesin/hardware (machine basic
instruction set). Sampai super komputer. Ini pula yang membawa peneliti lain di Bell
Labs bernama Dennis Ritchie menyempurnakannya menjadi bahasa C pada tahun
1972.
Kepopuleran bahasa C membuat versi-versi dari bahasa ini banyak dibuat
untuk komputer mikro. Untuk membuat versi-versi tersebut standar, ANSI (American
National Standards Institute) kemudian menetapkan standar ANSI untuk bahasa C.
2.7.1 Perintah Dasar Dalam C
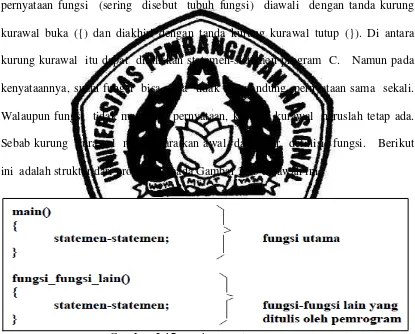
Sebuah program dalam bahasa C setidaknya harus memiliki sebuah fungsi.
Fungsi pertama yang harus ada dalam program C dan sudah ditentukan namanya
adalah main(). Setiap fungsi terdiri atas satu atau beberapa pernyataan, yang
secara keseluruhan dimaksudkan untuk melaksanakan tugas khusus. Bagian
pernyataan fungsi (sering disebut tubuh fungsi) diawali dengan tanda kurung
kurawal buka ({) dan diakhiri dengan tanda kurung kurawal tutup (}). Di antara
kurung kurawal itu dapat dituliskan statemen-statemen program C. Namun pada
kenyataannya, suatu fungsi bisa saja tidak mengandung pernyataan sama sekali.
Walaupun fungsi tidak memiliki pernyataan, kurung kurawal haruslah tetap ada.
Sebab kurung kurawal mengisyaratkan awal dan akhir definisi fungsi. Berikut
ini adalah struktur dari program C pada Gambar 2.15 dibawah ini.
Gambar 2.15 Struktur Dari Program C
Bahasa C dikatakan sebagai bahasa pemrograman terstruktur karena
strukturnya menggunakan fungsi-fungsi sebagai program-program bagiannya
program-program bagian. Fungsi-fungsi ini dapat ditulis setelah fungsi utama
atau diletakkan di file pustaka (library). Jika fungsi-fungsi diletakkan di file
pustaka dan akan dipakai di suatu program, maka nama file judulnya (header
file) harus dilibatkan dalam program yang menggunakannya dengan preprocessor
directive berupa #include.
2.7.2 Kelebihan Program C
Bahasa C merupakan pilihan dari sebagian kalangan programmer untuk
membuat aplikasi. Hal ini disebabkan kelebihan yang ada pada Bahasa C, berikut ini
sebagian kecil dari banyak kelebihan Bahasa C :
a. Bahasa C tersedia hampir di semua jenis komputer.
b. Kode bahasa C sifatnya adalah portabel.
c. Aplikasi yang ditulis dengan bahasa C untuk suatu komputer tertentu dapat
digunakan di komputer lain hanya dengan sedikit modifikasi.
d. Bahasa C hanya menyediakan sedikit kata-kata kunci.
e. Proses executable program bahasa C lebih cepat.
f. Dukungan pustaka yang banyak : Keandalan bahasa C dicapai dengan adanya
fungsi-fungsi pustaka.
g. C adalah bahasa yang terstruktur : Bahasa C mempunyai struktur yang baik
sehingga mudah untuk dipahami. C mempunyai fungsi-fungsi sebagai
h. Selain bahasa tingkat tinggi, C juga dianggap sebagai bahasa tingkat
menengah : Bahasa C mampu menggabungkan kemampuan bahasa tingkat
tingkat tinggi dengan bahasa tingkat tingkat rendah.
i. Bahasa C adalah kompiler : Karena C sifatnya adalah kompiler, maka akan
menghasilkan executable program yang banyak dibutuhkan oleh
program-program komersial.
j. Selain alasan tersebut ada beberapa alasan lain mengapa menggunakan bahasa
C, yaitu:
−C adalah bahasa pemrograman yang memiliki portabilitas tinggi.
Program C yang kita tulis untuk satu jenis platform, bisa kita kompile
dan jalankan di platform lain dengan tanpa ataupun hanya sedikit
perubahan. Ini bisa diwujudkan dengan adanya standarisasi ANSI
untuk C.
−C adalah bahasa pemrograman dengan kata kunci (keyword) sedikit.
Kata kunci disini adalah merupakan fungsi ataupun kata dasar yang
disediakan oleh kompiler suatu bahasa pemrograman. Hal ini
membawa pengaruh semakin mudahnya kita menulis program dengan
C. Pengaruh lain dari sedikitnya kata kunci ini adalah proses eksekusi
program C yang sangat cepat.
2.7.3 C Dan Pemrograman Mikrokontroler AVR AtMega16
Dalam pembuatan program yang menggunakan fungsi atau aritmatika, Bahasa
pembuatan konstanta, operator aritmatika, operator logika, operator bitwise dan
operator Assigment.
Selain itu, bahasa C menyediakan Program kontrol seperti: Percabangan (if
dan if…else), Percabangan switch, Looping (for, while dan do…while),Array, serta
fungsi – fungsi lainnya. Di bawah ini merupakan contoh penulisan program dalam
bahasa C untuk mikrokontroller AVR ATMEGA16. Contoh inisialisasi bentuk
program C, antara lain :
//Preprocessor
#include <mega16.h>
#include <delay.h>
# define tachometer PINA.0
# define motor_AC PORTB.0
//variable global
Unsigned int i,j;
void main(void)
{
//inisialisasi port, timer, dsb.
While(1)
{
for (i=0; i<=255; i ++)
{
if (tachometer==0)
{motor_AC = 1;}
}
};
}
Keterangan :
Preprocessor digunakan untuk memasukkan (include) text dari file lain,
mendefinisikan macro yang dapat mengurangi beban kerja pemrograman dan
meningkatkan legability source code (mudah dibaca). Inisialisasi merupakan
Pada Bab ini menjelaskan mengenai analisa dan perancangan robot berkaki
yang dapat bereaksi terhadap gelombang suara, baik dalam hardware maupun
software.
3.1 Analisis Sistem
Dari pengklasifikasiannya robot dibedakan menurut jenisnya, antara lain :
robot beroda/mobile, robot berkaki dua sampai robot berkaki enam, robot hexapod,
robot jaringan, robot manipulator, robot humanoid, flying robot, under water robot.
Namun dalam memenuhi Tugas Akhir ini Penulis mencoba merancang desain robot
berkaki 6 dengan 2 servo penggerak tipe crawler. Desain robot crawler yang dibuat
seperti Gambar 3.1.
Sub bab ini menjelaskan tentang metode rancangan robot reaksi terhadap
gelombang suara secara mekanisme blok diagram hardware robot, flowchart.
3.2.1 Blok Diagram Hadware Robot
Blok diagram ini di gunakan untuk membaca susunan sistem hardware secara
mudah dan lebih akurasi. Hardware penting yang ada pada robot ini, antara lain :
Sensor Mic Condenser, Transistor bc547, Mikrokontroller AVR ATMega16, Servo
HS-311. Blok diagram hardware dapat dilihat desainnya pada Gambar 3.2.
Gambar 3.2 Blok Diagram Hardware Robot Sensor MIC CONDENSER
Penguat operasional t ransist or bc547
Mikrokontroler AVR ATMega16
Pada Gambar 3.3, menjelaskan tentang flowchart pergerakan robot reaksi
suara yang bergerak secara otomatis, diantaranya yaitu :
a. Inputan awal dari robot ini dimulai dari tombol Power-On dan
mikrokontroller. Apabila mikrokontroller telah di inputkan program maka,
mikrokontroller dapat di proses sesuai dengan program yang telah diatur oleh
pengguna.
b. Setelah Power-On diaktifkan maka proses berjalan pada penginisialisasian
port timer robot. Robot ini memiliki 2 tombol yaitu tombol 3 (sebagai
inisialisasi program robot reaksi gelombang suara) dan tombol 4 (sebagai
tombol play).
c. Tekan tombol 4 untuk play maka reaksi awal robot adalah berputar kekanan
beberapa detik kemudian berjalan lurus. Apabila ada suara/bunyi maka robot
akan berputar berbelok dan jika tidak ada suara/bunyi maka robot akan terus
berjalan lurus hingga robot menerima inputan suara/bunyi sebagai perintah.
3.3 Kebutuhan Perangkat Keras
Untuk membuat robot ini diperlukan beberapa hardware diantaranya sebagai
berikut :
a. Aluminium
Dalam pembuatan robot ini memerlukan aluminium yang berfungsi
Downlodder merupakan sebuah alat / conector penghubung yang
digunakan untuk menanamkan software yang telah kita buat dalam bahasa
C tapi sebelumnya akan di ubah dulu menjadi bilangan Heks.
c. Rangkaian mikrokontroller AVR ATMega16
Pada rancangan robot ini di butuhkan 1 buah mikrokontroler AVR
ATMega16.
d. Rangkaian servo HS-311
Pada rancangan robot ini di butuhkan 2 buah Servo tipe HS-311 yang
terletak di sisi kiri dan kanan pada rangka kaki robot.
e. Sensor Mic Condenser
Pada rancangan robot ini di butuhkan 1 buah sensor Mic Condenser.
f. Transistor bc547 (dibutuhkan 2 buah transistor bc547)
Pada rancangan robot ini di butuhkan 2 buah transistor bc547. Transistor
adalah komponen yang digunakan sebagai penguat arus pada robot reaksi
terhadap suara ini.
g. Baterai alkaline (dibutuhkan 4buah baterai)
Dalam sistem nantinya digunakan baterai alkaline AA 6Volt sebanyak 4
biji. 6Volt digunakan untuk mikrokontroler yang diturunkan menjadi
Pada Sub bab ini akan menjelaskan tentang alat-alat elektronik yang terkait di
dalam PCB robot, diantaranya adalah :
a. PCB (Printed Circuit Board)
PCB atau Papan Sirkuit Cetak adalah sebuah papan yang penuh
dengan sirkuit dari logam yang menghubungkan komponen elektronik satu
sama lain tanpa kabel.
b. Resistor
Pada rancangan robot ini di butuhkan 10 buah resistor. Resistor adalah
salah satu komponen elekronika yang berfungsi untuk menahan arus yang
mengalir dalam suatu rangkaian/sistim elekronika. Resistor adalah
komponen yang paling sering di gunakan dalam rangkaian-rangkaian
elekronika[8]. Resistor diberi lambing huruf R dengan salurannya yaitu
Ohm (Ω). Gambar jenis resistor seperti Gambar 3.4.
Pada rancangan robot ini di butuhkan 5 buah LED. Light-Emitting
Diode atau LED merupakan sebuah alat semikonduktor yang berukuran
hanya beberapa milimeter saja. Alat ini mampu mengubah energi elektrik
secara langsung menjadi sinar dan tidak dapat dipungkiri sangat efisien
ketika berubah menjadi konsumsi energi [9]. LED juga merupakan lampu
indikator petunjuk pada robot menghindari halangan.
d. Elco 1000uf
Elco adalah komponen yang digunakan sebagai penyimpan arus
cadangan pada robot menghindari halangan. Di butuhkan 5 buah Elco
dengan berbagai jenis dan ukuran.
e. Button On/off
Tombol button On/Off digunakan untuk mengaktifkan robot. Button
On/Off pada robot berwarna merah. Dan 5 buah button untuk pilihan mode.
Button ke-1 untuk mengaktifkan sensor suara, button ke-2 untuk
mengaktifkan sensor cahaya, button ke-4 untuk mengaktifkan sensor
halangan, button ke-4 untuk mengaktifkan gerak motorik robot&gerak
motorik sensor, button ke-5 untuk reset.
f. Cooler PCB
Seperti namanya Cooler PCB adalah sebuah pendingin yang berfungsi
untuk mendinginkan sebuah PCB robot agar tidak hangus karena terlalu
Tombol Power-On adalah tombol untuk mengaktifkan robot, dimana
pada robot tersebut memiliki 2 tombol. Tombol ke-3 (tombol robot aktif)
untuk mengaktifkan robot, pada tombol ke-4 (tombol play) untuk memulai
jalannya robot. Dimana para robot tersebut memiliki komponen servo
dengan baterai sebagai arus listrik untuk menggerakkan robot dan sensor
Mic Condenser.
h. Tombol reset
Tombol reset pada robot berfungsi untuk pengembalian setting robot
pada kondisi normal atau bernilai 0.
3.5 Bagian Rangkaian Hadware Robot
Rangkaian robot yang tertanam pada PCB terdiri dari beberapa komponen :
a. Ruas Kaki
Gambar 3.5 Rangkaian Kaki-Kaki Robot
Gambar 3.6 Jenis Dan Ukuran Kaki Robot
Penjelasan Rangkaian Kaki Robot pada Gambar 3.5 dan Gambar 3.6 :
Pada Gambar 3.5 di terangkan ada 6 ruas kaki pada kaki robot sebelah kiri.
Jika kaki sebelah kanannya di hitung maka jumlah ke seluruhan ruas kaki pada robot
sebanyak 12 ruas. Masing-masing ruas mempunyai ukuran yang berbeda-beda sesuai
dengan kebutuhan perancangan. Sesuai perancangan kerangka kaki robot di bagi
menjadi 2 bagian, yaitu :
a. Disesuaikan menurut panjang dan lebar ruas kaki
− Panjang ruas kaki 1 = 6,3cm / 63mm
Lebar ruas kaki 1 = 1cm / 10mm
− Panjang ruas kaki 2 = 6,3cm / 63mm
Lebar ruas kaki 2 = 1cm / 10mm
Lebar ruas kaki 3 = 1cm / 10mm
b. Disesuaikan menurut kebutuhan jenis ruas kaki yang di pasang
− Jenis ruas kaki 1 = 6 buah
− Jenis ruas kaki 2 = 2 buah sepasang (kaki kanan & kaki kiri)
− Jenis ruas kaki 3 = 4 buah
b. Mur dan Baut
Pada Gambar 3.7 di terangkan berbagai jenis mur dan baut yang di pakai
dalam perancangan pembuatan kerangka kaki robot. Panjang dari tiap-tiap mur
terbagi menjadi beberapa bagian :
− Panjang Mur 1 = 8mm
− Panjang Mur 2 = 13mm
− Panjang Mur 3 = 7mm
− Panjang Mur 5 = 4mm
− Panjang dan Sisi Baut = 2,7mm
c. Komponen Penyambung Kaki Robot
e. Komponen Penyambung Kaki Robot
Gambar 3.9 Servo Pada Rangka Robot
Penjelasan Servo Pada Rangka Robot pada Gambar 3.9 :
Pada Gambar 3.9 di terangkan bahwa servo yang di pakai adalah jenis
HS-311. Penulis memakai 2 buah servo pada perancangan robot ini. Servo ini di
Gambar 3.10 Komponen Penyambung Kaki Robot
g. Obeng Blimbing
Obeng belimbing ini digunakan untuk membuka mur dan baut pada
Tang ini digunakan untuk membuka mur dan baut dengan tipe gear
pada ragkaian ruas kaki robot.
3.6 Kebutuhan Perangkat Lunak
Software yang digunakan dalam robot reaksi terhadap suara tipe crawler
dengan enam kai yang dapat bereaksi terhadap gelombang suara ini dengan
menggunakan mikrokontroller adalah sebagai berikut :
a. Bahasa pemrograman C
Sebuah bahasa program yang digunakan untuk merancang
program atau mengatur jalannya robot sesuai yang kita inginkan yang
nantinya akan digunakan untuk mengkontrol servo dan sensor mic
condenser. Hasil implementasi coding C akan di convert dalam bentuk
bahasa heksa / bahasa mesin yang nantinya dapat di baca oleh sistem
robot.
b. Code Vision AVR
Software ini untuk merancang, mengedit serta mengcompile
program bahasa C yang telah dibuat.
c. AVR Studio 4
Sebuah software yang digunakan untuk mengconvert bahasa
mikrokontroller AVR ATMega16.
d. Menggunakan sistem komputer dengan spesifikasi minimal pentium III.
3.7 Rangkaian Komponen Dalam PCB
Ini merupakan rangkaian PCB yang telah jadi, yang mana telah tertanam
tatanan komponennya secara teratur.
Gambar 3.11 Rangkaian Komponen Lengkap Pada PCB
Rancangan perangkat keras pada proyek akhir ini mempergunakan
mikrokontroler AVR ATMega16 sebagai sistem kontrol utama pada robot reaksi
suara dengan dilengkapi sensor Mic Condenser sebagai pendeteksi sinyal gelombang
suara. Seperti yang telah di bab sebelumnya tentang komponen-komponen robot,
maka penulis akan menganalisa model perancangan PCB pada robot. Desain
perancangan PCB ada pada Gambar 3.12.
Gambar 3.13 Rangkaian Elektronika Robot
Gambar 3.15 Skema Badan Robot
Pada Gambar 3.15 merupakan skema pembuatan badan robot. Bahan yang
dipakai untuk membuat badan utama robot yaitu dari bahan besi plat dengan panjang
21 cm, lebar 13 cm dan tebal 0.2 cm atau 2 mm. Pada skema diatas, badan robot di
bagi menjadi tiga bagian, yaitu yang diberi tanda huruf “A”,”B”,”C”.
Pada bagian yang bertanda huruf “A” merupakan area badan robot yang
ditekuk 90o ke bawah badan yang memiliki panjang 8.5 cm dan lebar 2 cm, bagian
yang bertanda huruf “B” merupakan bagian yang dipotong untuk tempat dudukan
motor servo yang memiliki panjang 4 cm dan lebar 2 cm, yang sebelumnya dipotong
terlebih dahulu sebelum proses penekukan bagian bertanda “A”, dan pada bagian
yang bertanda huruf “C” merupakan bagian utama badan robot dengan panjang 21 cm
pengukuran kasar yang kami kira-kira kurang lebihnya untuk panjang dan lebar
Pada Bab ini penulis menjelaskan tentang implementasi dari perancangan
perangkat keras (hardware) dan implementasi dari perancangan perangkat lunak dari
bab sebelumnya.
4.1 Implementasi Perangkat Keras
Pada bagian implementasi perangkat keras penulis coba menerapkan
perancangan perangkat keras yang telah di bahas di bab sebelumnya, yaitu
implementasi dari kerangka robot, mikrokontroler AVR ATMega16, servo HS-311,
sensor mic condenser dan perangkat elektronika pendukung.
4.1.1 Cara Merancang Robot
Merancang robot bukanlah suatu hal yang mudah dan tidak dapat dilakukan
oleh banyak kalangan. Dalam menjalani Tugas Akhir ini penulis ingin memaparkan
bagaimana cara merancang robot ini. Ada beberapa tahapan dan metode yang di
gunakan dalam mengimplementasikan rancangan robot sampai robot itu jadi,
diantaranya adalah :
Pertama, tentukan dulu tema robot dan fungsional yang ada pada robot yang
akan di rancang. Penulis pun mengambil tema “reaksi robot berkaki terhadap
pembuatan robot ini. Setelah membeli semua komponennya, kemudian mendesain
robotnya sesuai dengan keperluan dan kebutuhan.
Ketiga, setelah mendesign robot, kemudian merakit komponen-komponen
yang sudah ada ke PCB (Printed Circuit Board).
Ketiga, setelah itu untuk merakit komponen kaki-kaki robot yang merupakan
rangka robot.
Keempat, di dalam menggerakan robot maka di gunakan baterai dengan
ukuran AA yang berjumlah 4 (empat) biji.
Kelima, untuk mengupload program ke robot maka digunakan downloader
untuk mengirim program dari komputer ke mikrokontroler.
Rancangan robot ini dibagi menjadi dua tahapan pembuatan, yaitu : perancangan jalur PCB dan perancangan rangka kaki robot.
4.2 Perancangan Jalur PCB (Printed Circuited Onboard)
Perancangan jalur PCB ini adalah perancangan awal dari semua rangkaian
(rangkaian sensor mic condenser, rangkaian transistor bc547, rangkaian servo
bc547 dan rangkaian penggerak servo yang digabung di software PCB 123
dengan perbandingan 1 : 1. Desain rangkaian sensor, penggerak servo juga IC lainnya ada pada Gambar 4.1.
Gambar 4.1 Rangkaian PCB Secara Keseluruhan Yang Sudah Terbentuk
dan belum ada lubang dan disainnya), hal itu agar desain yang berada di mika bisa menempel di PCB matrik.
d. Jika desain sudah berhasil menempel di PCB matrik, masukkan PCB matrik
ke dalam larutan ferry chloride (FeCl³). Jika belum menempel maka lakukan penyetrikaan kembali sampai desain yang berada di mika bisa menempel di
PCB matrik.
e. Kocok PCB matrik yang ada di dalam larutan ferit sampai tembaga yang ada di PCB matrik.
f. Pengeboran PCB untuk pin atau kaki komponen,
g. Pemasangan komponen dan penyoderan pada PCB, pasang terlebih dahulu komponen pasif seperti resistor, transistor, diode, led. Kemudian baru pasang komponenyang aktif. Pasang IC untuk komponen yang tidak tahan panas yang terlebih sewaktu penyolderan, dengan catatan jangan dahulu memasang IC dalam soketnya. Hal ini dilakukan untuk menghindari kerusakan komponen akibat panas penyolderan.
h. Pemotongan sisi kaki komponen yang masih panjang i. Terakhir pengetesan alat.
4.3 Perancangan Kerangka Kaki Robot
yang penulis buat. Rancang bangun terdapat seperti berikut :
Gambar 4.2 Tahapan Pertama Kaki Robot
Gambar 4.3 Tahapan Kedua Kaki Robot 2
2
Gambar 4.4 Tahapan Ketiga Kaki Robot
Gambar 3.11 Rangka
Gambar 4.5 Tahapan Keempat Kaki Robot 2
5 1
2 5
1
Gambar 4.6 Tahapan Kelima Kaki Robot
Gambar 3.13 Rangkaian keenam kaki-kaki robot
Gambar 4.7 Tahapan Keenam Kaki Robot 1
1
3 2
4 5
6 2
3
5
Gambar 4.8 Tahapan Ketujuh Kaki Robot
Gambar 3.15 Langkah pertama
Gambar 4.9 Tahapan Kedelapan Kaki Robot 1
2
3
4 5
Gambar 3.16 Langkah kedua pemasangan kaki-kaki robot ke servo
Gambar 4.10 Tahapan Pertama Pemasangan Kaki Robot Ke Servo
Gambar 3.17 Langkah ketiga pemasangan kaki-kaki robot ke servo
Gambar 4.11 Tahapan Kedua Pemasangan Kaki Robot Ke Servo 2
Gambar 4.12 Tahapan Ketiga Pemasangan Kaki Robot Ke Servo
Gambar 3.19 Langkah kelima p
Gambar 4.13 Tahapan Keempat Pemasangan Kaki Robot Ke Servo 3
5
2
2
Gambar 4.14 Tahapan Kelima Pemasangan Kaki Robot Ke Servo
Gambar 4.15 Tahapan Keenam Pemasangan Kaki Robot Ke Servo 2
2
3
1 5
6
4
1
3 5
Gambar 4.16 Tahapan Ketujuh Pemasangan Kaki Robot Ke Servo
Gambar 4.17 Tahapan Kedelapan Pemasangan Kaki Robot Ke Servo 2
6 1
4 5
Gambar 4.18 Tahapan Kesembilan Pemasangan Kaki Robot Ke Servo
4.4 Implementasi Perangkat Lunak
Pada bagian implementasi perangkat lunak penulis coba menerapkan prosedur pemasangan aplikasi software yang digunakan membuat coding robot.
4.4.1 Proses Pemasangan
Ada beberapa tahapan yang harus dilakukan sebelum program dibuat dan dimasukkan ke dalam chip robot, yaitu :
Gambar 4.19 Langkah Kesatu Instalasi Program
Setelah di double klik maka akan muncul seperti pada Gambar 4.20, kemudian klik
OK. Dan klik next
Gamb
Gambar 4.21 Langkah Ketiga Instalasi Program
Gambar 4.21 Langkah Ketiga Instalasi Program
Pilih I accept the terms of the license agreement kemudian klik next. Dan simpan instalan AVR Studio4 ke dalam c://
Gambar 4.23 Langkah Kelima Instalasi Program
Centang kolom Install/upgrade Jungo USB Driver dan klik next.
Gambar 4.25 Langkah Ketujuh Instalasi Program
b. Setelah selesai menginstal maka tahap selanjutnya adalah pembuatan program melalui AVR Studio4.exe
memilih menu yang terdapat pada aplikasi AVR Studio4.exe atau dengan cara menekan shortcut tombol F9 yang terdapat pada keyboard untuk mengetahui program yang dibuat terdapat error atau tidak.
Gambar 4.27 Run Atau Compile Program
c. Jika dalam program tidak terdapat kesalahan atau error terlebih kita
compile program yang berekstensi .C ke .HEX, pilih compile atau dengan menekan tombol F9 pada keyboard.
Pada tahapan ini akan dibahas menganai implementasi program yang telah dibuat untuk robot, dari perancangan robot yang telah dibuat sebelumnya. Langkah pertama yang harus dilakukan dalam pembuatan program adalah mendeklarasikan semua fungsi, delay perintah ke perintah yang lain, dan semua port pada mikrokontroler yang digunakan sebagai input dan output dari program yang akan kita susun. Berikut adalah potongan program yang merupakan penentuan port pada mikrokontroller dalam membaca perintah sebelum masuk ke dalam perintah utama.
Deklarasi untuk lampu LED
Deklarasi untuk sensor Mic Condenser
Setelah proses deklarasi port yang ditentukan ke dalam mikrokontroller selesai, langkah kedua adalah membuat program yang akan memfungsikan register dan port mikrokontroller untuk menjalankan dan meneruskan perintah kepada piranti pendukungnya. Berikut adalah potongan program dimana robot akan berjalan sesuai inputan user. Program di bawah ini adalah sederet perintah mutlak mewakili inisialisasi program di atas jika sensor mendekati sebuah rintangan.
Perintah untuk menentukan robot maju
Perintah untuk menentukan robot mundur
Perintah untuk menentukan robot berhenti
LED1BLINK_F=0; LED2BLINK_F=0;
M IC_F=0 TESTM IC F=0
void servo1_forw ard (void) void servo2_forw ard (void)
void servo1_backw ard (void) void servo2_backw ard (void)
Perintah untuk menentukan robot pengecekan tombol
Perintah untuk menginterupsi delay pada tiap tombol
Perintah untuk menginterupsi delay lampu LED dan tombol ketika 2 (dua) tombol yang berbeda ditekan.
Perintah untuk menginterupsi delay (3detik) sensor Mic Condenser
void check_but t on (void)
int errupt [TIM 0_COM P] void t imer0_comp_isr(void)
int errupt [TIM 1_COM PA] void
t imer1_compa_isr(void)
Pada bab ini akan dibahas mengenai uji coba terhadap aplikasi yang telah
dibuat dan selanjutnya akan dibuat evaluasi dari hasil uji coba tersebut. Uji coba
dilaksanakan untuk mengetahui apakah apliasi dapat berjalan dengan baik sesuai
perancangan yang dibuat. Evaluasi dilakukan untuk menentukan tingkat keberhasilan
dari aplikasi yang dibuat.
5.1 Pengujian Alat Secara Keseluruhan
Tujuan pengujian alat secara keseluruhan untuk mendapatkan hasil dan
data-data secara keseluruhan dari awal rangkaian pendeteksi gelombang suara pada sensor
sampai bekerjanya rangkaian servo pada robot. Pengujian alat secara keseluruhan
dapat dilakukan dengan adanya program yang telah tertanam pada mikrokontroller.
Dengan menjalankan program sesuai dengan fungsinya, maka sistem dapat
berjalan sesuai dengan harapan yaitu robot akan berbelok arah jika ada inputan suara
di sekitarnya yang dilakukan oleh sensor dan keluarannya berupa bekerjanya motor
yang semuanya diproses oleh mikrokontroller.
Apabila sistem tidak bekerja sesuai dengan harapan, maka telah terjadi
kesalahan pada sistem tersebut. Oleh sebab itu di bab ini penulis akan menguji coba
Gambar 5.1 Robot Menyala Dan Siap Melaju Jalan
Gambar 5.2.
Gambar 5.2 Robot Melaju Lurus Kedepan
delay timer, yaitu dimana posisi robot tidak akan menerima respon perintah dulu hingga batas timer 3 detik selesai. Sehingga robot akan terus melaju kedepan. Delay timer 3 detik di maksudkan agar robot tidak menerima respon secara berlebihan. Karena sensor suara ini rentan dengan tingkat ke sensitifan peredam yang ada pada sensor.
5.2 Pengujian Robot Pada Keadaan Ramai Suara
Jikalau robot menerima banyak input suara maka robot akan terus berputar berbelok arah searah jarum jam, hingga inputan suara yang di tangkap oleh robot tersebut hilang. Seperti pada Gambar 5.3
Gambar 5.3 Arah Pergerakkan Robot Berputar Berput ar Kanan
Gambar 5.3 Robot berbelok arah
Gambar 5.4 Robot Berbelok Setelah Mendengar Suara
Penjelasan Gambar 5.4 :
Gambar 5.5 Robot Berbelok Setelah Mendengar Suara
Penjelasan Gambar 5.5 :
6.1 Kesimpulan
Dari hasil uraian yang telah digambarkan baik secara teori maupun
berdasarkan hasil-hasil pengujjian yang telah digambarkan pada Tugas Akhir ini,
maka dapat diambil kesimpulan sebagai berikut :
Komponen terpenting yang dipergunakan pada Tugas Akhir Robot Suara
adalah dengan menggunakan salah satu jenis Mikrokontroller yaitu AVR ATmega16
dan sensor Mic Condenser. Dengan Mikrokontroller AVR ATMega16 tersebut dapat
diketahui bahwa dalam merancang sebuah robot dapat ditentukan gerak laju secara
otomatis sesuai dengan program yang telah diinputkan ke dalam chip robot. Robot ini
melaju dan mendeteksi tiap suara yang dijadikan sebagai perintah.
6.2 Saran
Dengan adanya kekurangan dalam kinerja dari robot suara banyak hal-hal
yang perlu dilakukan untuk mendapatkan sistem yang lebih baik :
a. Untuk sensor robot dikembangkan dengan pendeteksian suara misalnya
dipasang sensor suara atau kamera pada robot. Dan arak geraknya
menggunakan remote control.
b. Sensor suara seharusnya dapat mendeteksi suara perorangnya secara