BAB III
PERANCANGAN SISTEM
Pada bab ini, akan dijelaskan tentang perancangan perangkat keras beserta perangkat lunak sistem yang dibuat.
3.1. Gambaran Sistem
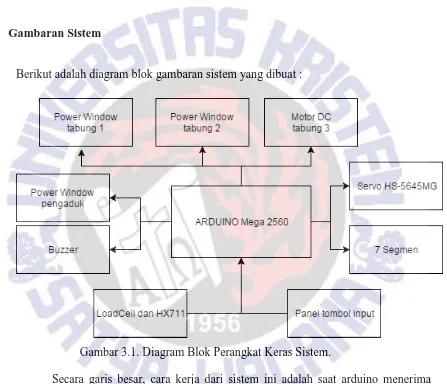
Berikut adalah diagram blok gambaran sistem yang dibuat :
Gambar 3.1. Diagram Blok Perangkat Keras Sistem.
Secara garis besar, cara kerja dari sistem ini adalah saat arduino menerima masukan tegangan, arduino akan mengirimkan masukan kepada 7 segment untuk menampilkan menu utama. Pada menu utama ini, user dapat memasukan jumlah
cawan penimbangan. Pada proses akhir, arduino akan memberi masukan kepada motor DC power window agar motor bekerja selama 3 menit dan arduino akan kembali memberikan masukan kepada buzzer sebagai penanda proses telah berakhir.
3.2. Perancangan dan Realisasi Perangkat keras
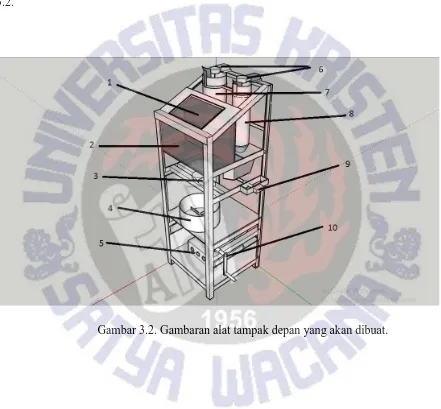
Perancangan alat yang dibuat secara keseluruhan adalah seperti yang ditunjukkan Gambar 3.2.
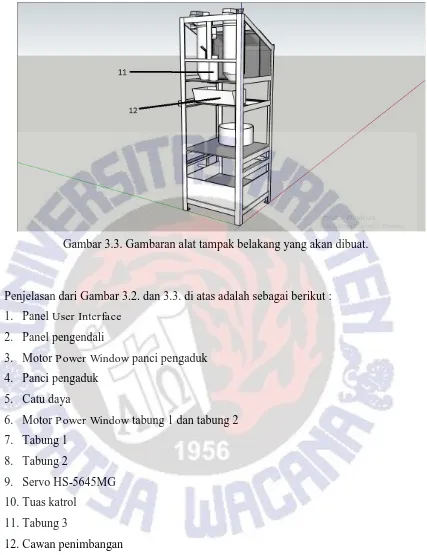
Gambar 3.3. Gambaran alat tampak belakang yang akan dibuat.
Penjelasan dari Gambar 3.2. dan 3.3. di atas adalah sebagai berikut : 1. Panel User Interface
2. Panel pengendali
3. Motor Power Window panci pengaduk 4. Panci pengaduk
5. Catu daya
6. Motor Power Window tabung 1 dan tabung 2 7. Tabung 1
8. Tabung 2
9. Servo HS-5645MG 10.Tuas katrol
11.Tabung 3
Gambar 3.4. Realisasi Perangkat Keras Tampak Depan
Alat ini dibagi dalam beberapa bagian, yaitu panel pengendali, tabung penurunan tepung, penimbangan, dan pengadukan.
3.2.1. Panel Pengendali
Panel pengendali merupakan bagian yang berisikan pengendali utama
/mikrokontroler dari alat yang akan dibuat. Selain mikrokontroler, panel pengendali berisikan modul regulator UBEC, dan relay. Pada bagian atas panel terdapat user interface berupa sebuah panel yang berisikan 9 tombol, 6 LED indicator, dan 1 buah modul 7 segment.
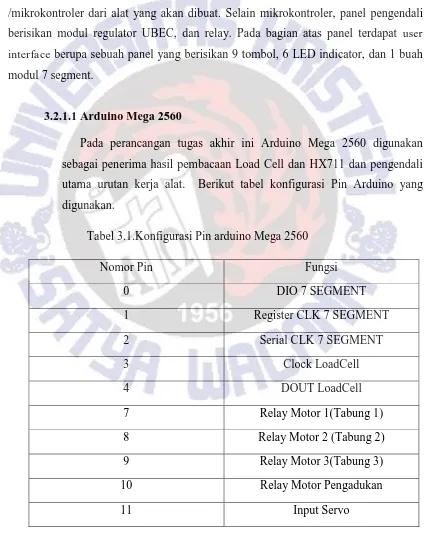
3.2.1.1Arduino Mega 2560
Pada perancangan tugas akhir ini Arduino Mega 2560 digunakan sebagai penerima hasil pembacaan Load Cell dan HX711 dan pengendali utama urutan kerja alat. Berikut tabel konfigurasi Pin Arduino yang digunakan.
Tabel 3.1.Konfigurasi Pin arduino Mega 2560
42 LED Start
3.2.1.2Modul Regulator UBEC 3A 5V-6V
Regulator UBEC 3A 5V-6V ini digunakan sebagai penurun tegangan masukan dalam Arduino dan servo HS-5645MG. Tegangan yang diturunkan adalah tegangan yang berasal dari Power Supply dengan tegangan sebesar 12V dan arus maksimal sebesar 10A.
3.2.1.3Modul Relay 12V 20A
3.2.1.4Panel User Interface
Selain arduino, regulator UBEC, dan relay 12V, pada panel pengendali ini juga terdapat panel User Interface. Pada panel ini terdapat 6 buah LED
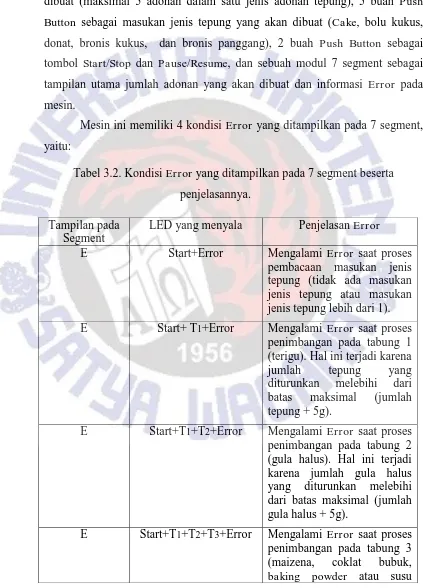
Mesin ini memiliki 4 kondisi Error yang ditampilkan pada 7 segment, yaitu:
Tabel 3.2. Kondisi Error yang ditampilkan pada 7 segment beserta penjelasannya.
Tampilan pada Segment
LED yang menyala Penjelasan Error
bubuk). Hal ini terjadi karena
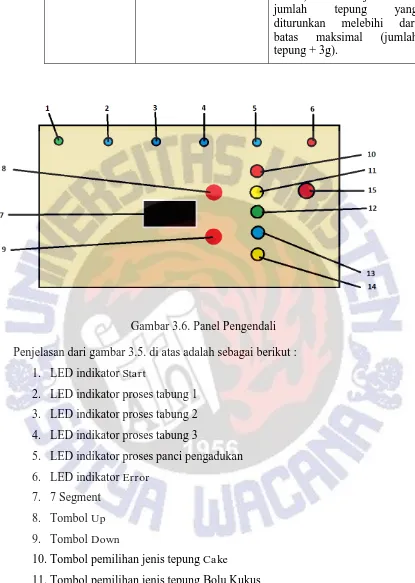
Penjelasan dari gambar 3.5. di atas adalah sebagai berikut : 1. LED indikator Start
2. LED indikator proses tabung 1 3. LED indikator proses tabung 2 4. LED indikator proses tabung 3
5. LED indikator proses panci pengadukan 6. LED indikator Error
7. 7 Segment 8. Tombol Up 9. Tombol Down
10.Tombol pemilihan jenis tepung Cake
11.Tombol pemilihan jenis tepung Bolu Kukus 12.Tombol pemilihan jenis tepung Donat
13.Tombol pemilihan jenis tepung Brownis Kukus 14.Tombol pemilihan jenis tepung Brownis Panggang
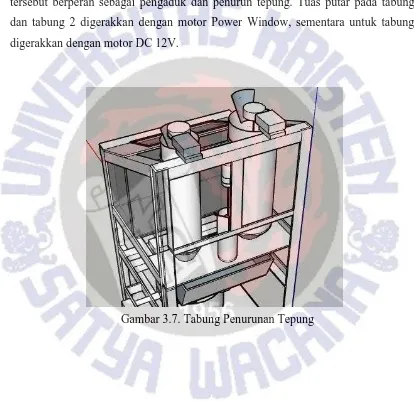
3.2.2. Tabung Penurunan Tepung
Tabung penurunan tepung terdiri dari 3 buah tabung dengan kapasitas pada setiap tabungnya 3,5 kg, 2 kg, dan 1,5 ons. Tabung yang digunakan berbentuk silinder dengan diameter pada setiap tabungnya 16 cm, 10 cm, dan 5 cm. Pada bagian bawah tabung diameter silinder tabung akan mengecil menjadi 5 cm dengan alas berongga agar tepung dapat turun dan tersaring . Pada tengah tabung, terdapat sebuah tuas yang memiliki cabang pada setiap sisinya dan disusun membentuk seperti ulir. Tuas tersebut berperan sebagai pengaduk dan penurun tepung. Tuas putar pada tabung 1
dan tabung 2 digerakkan dengan motor Power Window, sementara untuk tabung 3 digerakkan dengan motor DC 12V.
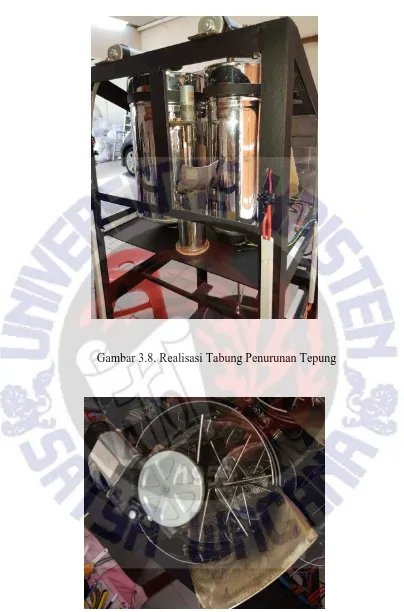
Gambar 3.8. Realisasi Tabung Penurunan Tepung
3.2.3. Penimbangan
Bagian Penimbangan pada tugas akhir ini menggunakan sensor berat Load
cells, Analog to Digital Converter HX711 Modul, dan motor servo HS-5645MG.
3.2.3.1.1. Load Cells dan HX711
Load Cells dan HX711 merupakan komponen utama dalam proses penimbangan. Dalam proses penimbangan keseimbangan Load Cells sangatlah penting agar dapat menampilkan hasil penimbangan yang akurat.
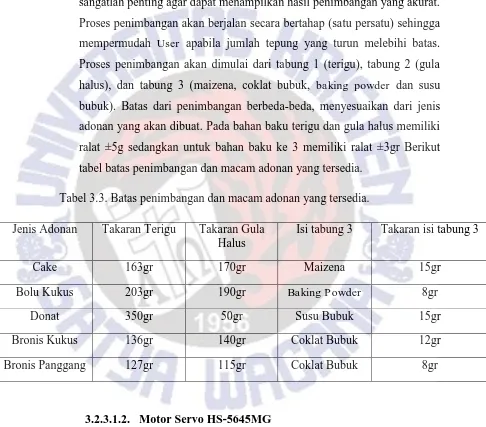
Proses penimbangan akan berjalan secara bertahap (satu persatu) sehingga mempermudah User apabila jumlah tepung yang turun melebihi batas. Proses penimbangan akan dimulai dari tabung 1 (terigu), tabung 2 (gula halus), dan tabung 3 (maizena, coklat bubuk, baking powder dan susu bubuk). Batas dari penimbangan berbeda-beda, menyesuaikan dari jenis adonan yang akan dibuat. Pada bahan baku terigu dan gula halus memiliki ralat ±5g sedangkan untuk bahan baku ke 3 memiliki ralat ±3gr Berikut tabel batas penimbangan dan macam adonan yang tersedia.
Tabel 3.3. Batas penimbangan dan macam adonan yang tersedia.
Jenis Adonan Takaran Terigu Takaran Gula Halus
Isi tabung 3 Takaran isi tabung 3
Cake 163gr 170gr Maizena 15gr
Bolu Kukus 203gr 190gr Baking Powder 8gr
Donat 350gr 50gr Susu Bubuk 15gr
Bronis Kukus 136gr 140gr Coklat Bubuk 12gr
Bronis Panggang 127gr 115gr Coklat Bubuk 8gr
3.2.3.1.2. Motor Servo HS-5645MG
Dalam perancangan ini Motor servo digunakan untuk membalik cawan penimbangan. Setelah proses penimbangan selesai pada 1 jenis tepung (1
jenis tabung), maka servo akan segera membalik cawan penimbangan
Servo ini terhubung dengan besi as setebal 8mm sepanjang 40cm yang terletak segaris dengan tuas servo dan terletak vertilal pada kerangka utama, setiap ujung dari besi as tersebut diberi sebuah bearing yang bertujuan untuk menghilangkan gaya gesek antara besi as dan kerangka utama. Pada besi as yang terletak di tengah kerangka utama terdapat sebuah plat besi dengan panjang 8cm yang bertujuan untuk menopang cawan penimpangan yang memiliki panjang 20cm. Sehinga torsi yang dibutuhkan :
Dengan demikian Servo HS-5645MG yang memiliki torsi 12.1kg.cm dirasa sudah mencukupi kebutuhan yang diperlukan.
Gambar 3.10. Realisasi Penimbangan
3.2.4. Pengadukan
Gambar 3.11. Cawan pengadukan Saat Diturunkan
3.3. Perancangan Perangkat Lunak
Penjelasan diagram alir mikrokontroler:
1. Program akan berjalan saat mikrokontroler mendapatkan masukan daya.
2. Program akan memeriksa ada tidaknya inputan dari tombol up, down, start.
3. Bila ada inputan dari tombol up, maka variable jumlah dan display 7 segment
akan ditambahkan 1.
4. Bila ada inputan dari tombol down, maka variable jumlah dan display 7
segment akan dikurangkan 1.
5. Bila ada inputan dari tombol start, maka program akan membaca inputan jenis
tepung.
6. Program akan memeriksa bilamana jumlah tombol yang ditekan lebih atau
kurang dari 1(jumlah tombol yang di tekan !=1).
7. Jika jumlah tombol yang ditekan lebih atau kurang dari 1(jumlah tombol yang
di tekan !=1), maka Buzzer akan berbunyi dan 7 segment akan menampilkan E
(Error pada bagian pemilihan jenis tepung).
8. Jika jumlah tombol yang ditekan tidak lebih atau kurang dari 1 (jumlah tombol
yang di tekan ==1), maka program akan memeriksa tombol adonan tepung
manakah yang di tekan (Cake, Bolu Kukus, Donat, Bronis Kukus, atau Bronis
Panggang).
9. Bila masukan merupakan tombol Cake, maka program akan menetapkan
variable T1 = 163, T2 = 170, dan T3 = 15 sebagai pembatas saat penimbangan.
10.Bila masukan merupakan tombol Bolu Kukus, maka program akan menetapkan
variable T1 = 203, T2 = 190, dan T3 = 7 sebagai pembatas saat penimbangan.
11.Bila masukan merupakan tombol Donat, maka program akan menetapkan
variable T1 = 350, T2 = 50, dan T3 = 15 sebagai pembatas saat penimbangan.
12.Bila masukan merupakan tombol Bronis Kukus, maka program akan
menetapkan variable T1 = 136, T2 = 140, dan T3 =12 sebagai pembatas saat
penimbangan.
13.Bila masukan merupakan tombol Bronis Panggang, maka program akan
menetapkan variable T1 = 127, T2 = 115, dan T3 = 8 sebagai pembatas saat
penimbangan.
14.Sebelum memasuki proses penimbangan, program akan membaca variable
penanda program berapa banyak adonan yang akan dan telah dibuat. LED
tabung1 akan menyala sebagai indikasi proses yang sedang berjalan (LED
Tabung1= HIGH).
15.Pada proses penimbangan, mikrokontroler akan memproses data dari sensor
berat (Load Cell dan HX711). Data yang didapat akan dikomparasikan dengan
variable T1 (Lread==T1).
16.Apabila data tidak sama, maka mikrokontroler akan memberikan masukan
HIGH pada Relay 1 (RELAY1 = HIGH) sehingga motor power window pada
tabung 1 akan aktif. Proses ini akan berlangsung hingga datapada variabel
Lread sesuai dengan data pada variabel T1.
17.Kemudian, data pada variabel Lread akan di komparasikan dengan data T1 + 5
(Lread>=T1+5). Hal ini bertujuan sebagai pelindung dari batas ralat
penimbangan tabung 1 (±5g).
Buzzer (RELAY1=LOW Buzzer = LOW) dan servo akan bekerja membalik
cawan penimbangan. LED tabung2 akan menyala sebagai indikasi proses yang
sedang berjalan (LED Tabung2= HIGH).
20.Selanjutnya, mikrokontroler akan kembali memproses data dari sensor berat
(Load Cell dan HX711). Data yang didapat akan dikomparasikan dengan
variable T2 (Lread==T2).
21.Apabila data tidak sama, maka mikrokontroler akan memberikan masukan
HIGH pada Relay 2 (RELAY2 = HIGH) sehingga motor power window pada
tabung 2 akan aktif. Proses ini akan berlangsung hingga datapada variabel
Lread sesuai dengan data pada variabel T2.
22.Kemudian, data pada variabel Lread akan di komparasikan dengan data T2 + 5
(Lread>=T2+5). Hal ini bertujuan sebagai pelindung dari batas ralat
penimbangan tabung 2 (±5g).
23.Jika data variabel Lread dinyatakan melebihi atau sama dengan T2+5 , maka
penimbangan tabung 2 di mana jumlah tepung yang turun melebihi batas
maksimal).
24.Jika data variabel Lread dinyatakan tidak melebihi atau sama dengan T2+5,
maka mikrokontroler akan memberikan masukan LOW ke RELAY2 dan
Buzzer (RELAY2=LOW Buzzer = LOW) dan servo akan bekerja membalik
cawan penimbangan. LED tabung3 akan menyala sebagai indikasi proses yang
sedang berjalan (LED Tabung3= HIGH).
25.Mikrokontroler akan kembali memproses data dari sensor berat (Load Cell dan
HX711). Data yang didapat akan dikomparasikan dengan variable T3
(Lread==T3).
26.Apabila data tidak sama, maka mikrokontroler akan memberikan masukan
HIGH pada Relay 3 (RELAY3 = HIGH) sehingga motor DC 12V pada tabung
3 akan aktif. Proses ini akan berlangsung hingga datapada variabel Lread sesuai
dengan data pada variabel T3.
27.Kemudian, data pada variabel Lread akan di komparasikan dengan data T3 + 3
(Lread>=T3+3). Hal ini bertujuan sebagai pelindung dari batas ralat
penimbangan tabung 3 (±3g).
Buzzer, FLAG akan dikurangi 1 (RELAY3=LOW Buzzer = LOW FLAG--)
dan servo akan bekerja membalik cawan penimbangan.
30.Berikutnya Mikrokontroler akan memberi masukan HIGH ke RELAY4
sehingga motor pengaduk akan berjalan selama 3 menit untuk mengaduk 3
macam tepung tadi (RELAY4=HIGH & delay(180000)).
31.Setelah bekerja selama 3 menit, buzzer akan berbunyio sebanyak 3 kali, Relay
4 (motor pengaduk) akan di beri inputan LOW dan sistem penggerak panci
pengaduk akan bekerja menurunkan panci, menandakan bahwa adonan telah
32.Setelah itu, mikrokontroler akan menunggu masukan dari tombol up atau down
sebagai indikator bahwa mangkuk pengadukan telah dikembalikan ke
tempatnya dan sistem penggerak panci pengaduk akan bekerja menaikan panci.
33.Mikrokontroler akan memeriksa jumlah FLAG.Bila FLAG bukan 0, maka
proses penimbangan akan diulang (mengulang ke langkah 15). Bila FLAG