1
APLIKASI TAPIS ADAPTIF FIR UNTUK MENGHILANGKAN
ARTEFAK PADA SINYAL ELEKTROKARDIOGRAFI
Bambang Hadi Kunaryo1, Wahyudi,ST,MT2, Imam Santoso,ST,MT2
Jurusan Teknik Elektro, Fakultas Teknik Universitas, Diponegoro Jl. Prof. Sudharto, Tembalang, Semarang, Indonesia
Email : [email protected]
Telp : +622470436372/081325719580
ABSTRAK
Beberapa kasus grafik yang tercatat melalui rekaman elektrokardiogram memungkinkan terdapat kesalahan, hal ini disebabkan karena adanya kesulitan teknik mengenai elektrokardiogram yaitu dengan adanya artefak dan teknik perekaman yang jelek, salah satu pendekatan dalam mengatasi artefak dan teknik perekaman yang jelek adalah penggunaan tapis adaptif.
Berdasarkan kesulitan teknik tersebut pada tugas akhir ini dibuat isyarat dari keluaran elektrokardiogram dengan parameter panjang gelombang 1600 mm dan tegangan 30 Vp-p yang kemudian diberi variasi artefak, digunakan tapis adaptif FIR untuk menghilangkan artefak pada sinyal isyarat elektrokardiogram dengan memberikan variasi nilai sebesar 0.00008 dan memberikan orde tapis sebanyak 5.
Berdasarkan simulasi maka sinyal elektrokardiogram yang ada artefaknya bisa dikurangi atau dihilangkan berdasarkan nilai yang menyebabkan keluaran sinyal hasil tapis mendekati sinyal masukan tanpa artefak sedangkan berdasarkan nilai tapis menyebabkan artefak cepat dihilangkan dan sinyal informasi segera diperbaiki.
Kata Kunci: Least Means Square (LMS), Finite Impulse Response (FIR).
1. PENDAHULUAN
Berhubung tubuh merupakan suatu konduktor yang baik maka impuls yang dibentuk oleh jantung dapat menjalar ke seluruh tubuh. Sehingga potensial arus bioelektrik yang dipancarkan oleh jantung dapat diukur dengan sebuah galvanometer melalui elektroda-elektroda yang diletakkan pada berbagai posisi di permukaan tubuh[7]. Perbedaan tegangan ini terjadi karena depolarisasi dan repolarisasi serabut otot jantung[11]. Grafik yang tercatat melalui rekaman ini disebut elektrokardiogram (EKG), ilmu yang mempelajari EKG disebut elektrokardiografi[7]. Namun demikian suatu elektrokardiogram memang dapat memberi banyak informasi, tetapi bukanlah suatu alat yang tidak dapat membuat kesalahan. Pada waktu membuat rekaman EKG, kita harus sadar akan adanya kesulitan teknik yang mengenai elektrokardiogram yaitu adanya artefak dan teknik perekaman yang jelek[10][16], kesulitan teknik ini dapat dikurangi dengan penggunaan filter, pada Tugas Akhir ini akan menggunakan suatu tapis adaptif untuk mengembalikan gambar elektrokardiogram yang secara teknik baik.
2. DASAR TEORI
Elektrokardiogram (EKG) merupakan rekaman grafik potensial-potensial listrik yang ditimbulkan oleh jaringan jantung. Jantung merupakan otot tubuh yang bersifat unik karena mempunyai sifat membentuk impuls secara outomatis dan berkontraksi ritmis.
2.1 Elektro Fisiologi Jantung[7]
Perlu diketahui bahwa gambaran aksi potensial sel-sel otot jantung berbeda tergantung pada jenis sel. Setiap sel otot jantung yang mengadakan depolarisasi akan memprouksi sebuah potensial aksi yang monofasik. Gabungan semua monofasik potensial aksi dari sel-sel otot jantung inilah yang membentuk komplek EKG yang juga mewakili sebuah denyut jantung , diperlihatkan pada Gambar 1.
Depolarisasi dan repolarisasi ini merupakan suatu proses yang berlangsung terus menerus agar jantung tetap berdenyut. Kedua proses ini saling bergantung satu sama lain. Depolarisasi hanya dapat tinbul setelah sel dalam keadaan repolarisasi, sebaliknya repolarisasi baru terjadi setelah sel berdepolarisasi
2.2. Sadapan EKG
Sadapan ini pertamakalinya diperkenalkan oleh Einthoven tahun 1903 seorang ahli ilmu faal Belanda, Hubungan dari ketiga sadapan ekstremitas bipolar dari Einthoven secara matematis dapat dituliskan menjadi satu persamaan, yaitu :
Sadapan I = LA – RA Sadapan II = LL – RA Sadapan III = LL – LA
Berdasarkan hokum Kirchhoff, jumlah aljabar perbedaan potensial dari suatu lingkungan tertutup sama dengan 0 apabila hokum ini diterapkan pada persamaan Einthoven seperti ditunjukkan pada Gambar 2, maka I + III + (-III) = 0 (karena sadapan II dipasang kebalikan dari I dan II), sehingga persamaan ini dapat ditulis : I + III = II.
Gambar 2 Triangel of Eithoven.
2.3. TAPIS
Secara umum terdapat 2 macam tapis yaitu : a. Tapis analog
Tapis analog menggunakan rangkaian elektronik yang terbuat dari resistor, kapasitor ataupun op amp untuk menghasilkan rangkaian tapis.
b. Tapis digital
Tapis digital menggunakan digital processor untuk melakukan kalkulasi numerik. Prosesor digital yang digunakan
yang biasa digunakan seperti PC atau DSP (digital Signal Processing) chip.
Dalam kawasan waktu karakteristik tapis digital dinyatakan dengan persamaan[9]:
y(n) = b(1)x(n) + b(2)x(n - 1) + ...+ b(nb + 1)x(n - nb) – a(2)y(n – 1) -...-a(na + 1)y(n - na) (1)
dimana x(n) adalah masukan, y(n) merupakan keluaran dan konstanta b(i) dan a(i) adalah koefisien tapis serta orde maksimal tapis dinyatakan oleh na dan nb. Dengan tranformasi z dalam kawasan frekuensi tapis digital dinyatakan dengan persamaan 2.
Berbagai macam nama digunakan untuk menggambarkan tapis tergantung dari na dan nb. Jika nb = 0 sering disebut dengan IIR (infinite impulse response), all-pole, recursive atau autoregressive (AR). Jika na = 0 tapis sering disebut dengan FIR (finiteimpulse response), all-zero, nonrecursive atau moving average (MA). Jika kedua–duanya lebih besar dari nol (na dan nb lebih besar dari pada nol) tapis sering disebut IIR, pole-zero, recursive, atau autoregressive moving average ( ARMA).
2.4. SISTEM ADAPTIF
Sistem adaptif merupakan suatu sistem yang mampu menyesuaikan dan dapat beadapatasi langsung dengan kondisi lingkunganya.[17] Setiap perubahan dari kondisi lingkungan akan selalu diikuti.
2.5. TAPIS ADAPTIF
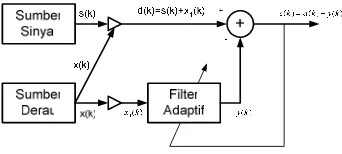
Tapis adaptif adalah tapis digital yang mempunyai kemampuan untuk mengubah bobot koefisiennya secara otomatis, menyesuaikan dengan sinyal input untuk memperkecil error.
Tapis adaptif membutuhkan dua input, yaitu sinyal dk dan referensi sk. Sinyal input dk terdiri dari sinyal informasi yang kita inginkan sk dan noise xk dimana sk dan nk tidak berkorelasi. Fungsi dari perubahan bobot koefisien untuk menghasilkan estimasi noise yk. Estimasi noise ini yang akan mengurangi sinyal input serhingga diperoleh estimasi sinyal yang diharapkan ek.
2.5.1 Tapis Adaptif FIR
Finite Impulse Response (FIR) merupakan salah satu tapis digital yang mempunyai tanggapan cuplik satuan yang berhingga. Karakteristik dasar dari tapis FIR menurut persamaan 3.[6]
∑
−=
−
=
10
)
(
)
(
)
(
N
k
k
n
x
k
h
k
y
(3)2.5.2. Algoritma Least Mean Square ( LMS )
Algoritma LMS sangat penting karena kemudahan dan kesederhanaan perhitungannya. Jika sistem adaptif adalah kombinator linear adaptif, dan jika vektor masukan Xk dan tanggapan yang diinginkan dk tersedia pada setiap iterasi, algoritma LMS akan menjadi pilihan terbaik untuk berbagai macam aplikasi pada pemrosesan sinyal secara adaptif. Keluarannya dapat dituliskan sebagai berikut.
Wk+1
= W
k-
∇
ˆ
k= W
k+ 2
ε
kX
k (4)3. Perancangan Tapis Adaptif dengan
Alogaritma LMS untuk Menghilangkan Artefak pada Sinyal Elektrokardiografi
Tapis adaptif, dengan menggunakan tapis adaptif Finite Impulse Response (FIR) dengan menggunakan algoritma LMS (least mean square) digunakan untuk menekan artefak pada sinyal Elektrokardiogram (EKG), simulasi ini dibuat untuk menunjukan salah satu penerapan tapis adaptif FIR dalam bidang perbaikan sinyal yang berhubungan dengan bidang kedokteran[6] .
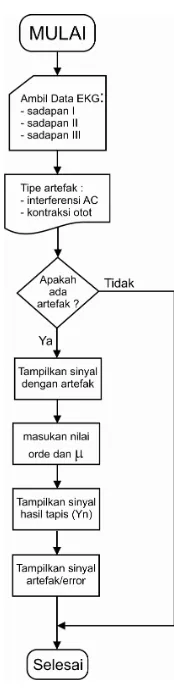
Ditunjukkan pada Gambar 4 diagram alir dari simulasi proses penekanan derau. Dalam proses awal sangat dibutuhkan inisial-inisial awal dari parameter yang digunakan.
Parameter-parameter yang perlu diinisialisasi terlebih dahulu yaitu panjang filter, koefisien filter serta ukuran langkah. Inisialisasi awal diperlukan untuk menentukan kondisi awal dari filter dan sistem.
Gambar 4 Diagram alir tapis menggunakan tapis adaptif FIR dengan algoritma LMS.
4. Hasil Simulasi dan Analisa
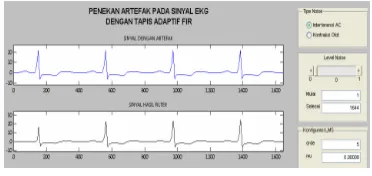
Masukan awal yang dibutuhkan pada algoritma LMS adalah memilih sinyal masukan, jenis artefak (interferensi AC atau gerakan otot), posisi artefak, panjang tapis atau orde dari tapis dan ukuran langkah
µ yang digunakan seperti ditunjukkan pada Gambar 5.
a. Sinyal sadapan I dengan artefak interferensi AC
b. Sinyal sadapan I dengan artefak kontraksi otot
(a)
(b)
(c)
4.1 Penekanan Artefak karena Interferensi
arus bolak-balik
Beberapa contoh hasil simulasi penekanan artefak dari artefak yang terjadi karena interferensi arus bolak-balik dilakukan dengan mengatur letak artefak dan mengubah–ubah besar level artefaknya. Berikut ditunjukkan pada Gambar 6 dibawah ini hasil simulasi pada sinyal elektrokardiograf pada sadapan pertama dengan panjang gelombang ± 1600 mm, tegangan 30 volt p-p dengan level artefak 1/maksimal.
.
(a) sinyal informasi sadapan I diberi artefak interferensi arus AC
(b) sinyal hasil tapis dengan µ = 0,0008, orde tapis = 5
(c) eror sinyalnya
Gambar 6 Hasil simulasi penekanan artefak interferensi AC.
Hasil terbaik diperoleh dengan menggunakan notasi = 0,00008 dengan panjang tapis 5, hal ini mengacu pada sinyal masukan elektrokardiograf tanpa diberi artefak seperti diperlihatkan pada Gambar 7 sedangkan hasil simulasi ditunjukkan pada Tabel 1.
Gambar 7 Sinyal elektrokardiograf sadapan I diberi artefak interferensi arus bolak-balik sebesar 0.
Jika panjang tapis dikurangi maka MSE akan semakin meningkat, sebaliknya jika panjang tapis ditambah maka MSE akan semakin turun hal ini disebabkan karena semakin banyak tapisnya maka sinyal hasil tapis akan semakin mendekati sinyal masukan dengan nilai artefak 0.
Tabel 1 Hasil simulasi penekanan artefak yang terjadi karena interferensi arus bolak-balik dengan tapis adaptif algoritma LMS untuk tapis FIR.
4.2 Penekanan Artefak karena kontraksi otot.
Berikut dibawah ini diperlihatkan pada Gambar 8, hasil dari simulasi yang dilakukan pada sinyal elektrokardiograf yang diambil pada sadapan pertama dengan panjang gelombang ± 1600 mm, tegangan 30 volt p-p dengan level artefak 1/maksimal.
(a) sinyal informasi sadapan I diberi artefak karena kontraksi otot
(b) sinyal hasil tapis dengan µ = 0,00008, orde tapis = 5
(c) eror sinyalnya
Gambar 8 Hasil simulasi penekanan artefak kontraksi otot.
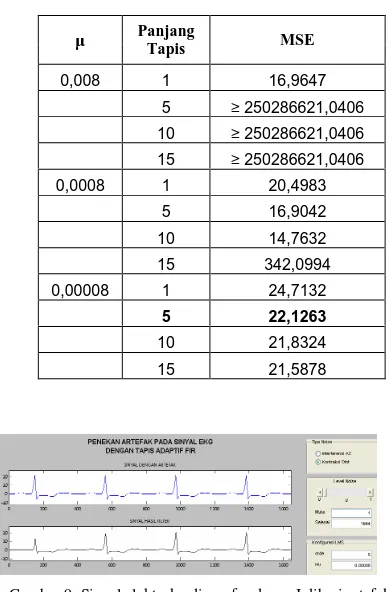
Simulasi diatas membuktikan jika panjang tapis dikurangi maka MSE akan semakin meningkat sebaliknya, jika panjang tapis ditambah maka MSE akan semakin turun hal ini disebabkan karena semakin banyak tapisnya maka sinyal hasil tapis akan semakin mendekati sinyal masukan dengan nilai artefak 0. Hasil terbaik diproleh dengan menggunakan = 0,00008 dengan panjang tapis 5, hal ini didasarkan pada sinyal masukan elektrokardiograf tanpa diberi artefak seperti
Panjang
Tapis MSE
0,008 1 294,1461
5 ≥ 250286621,0406
10 ≥ 250286621,0406
15 ≥ 250286621,0406
0,0008 1 29,2504
5 25,0719
10 38,5148
15 8336,1538
0,00008 1 36,0155
5 22,0636
10 21,7366
ditunjukkan pada Gambar 9 sedangkan hasil simulasi ditunjukkan pada Tabel 2.
Tabel 2 Hasil simulasi penekanan artefak yang terjadi karena kontraksi otot dengan tapis adaptif algoritma LMS untuk tapis FIR.
Gambar 9 Sinyal elektrokardiograf sadapan I diberi artefak kontraksi otot sebesar 0
5. Penutup
5.1 Kesimpulan
Dari analisis kinerja hasil simulasi dapat disimpulkan bahwa:
1. Sumber artefak interferensi arus
bolak-balik/AC dapat dihilangkan pada µ = 0,00008 dengan panjang tapis 5 dengan menghasilkan MSE sebesar 22,0636, sedangkan sumber artefak karena pengaruh kontraksi otot
dihilangkan pada µ = 0,00008 dengan
panjang tapis 5 menghasilkan MSE sebesar 22,1263.
2. Bila µ dan orde tapisnya semakin kecil maka MSE akan semakin kecil.
3. Semakin besar orde tapis maka sinyal hasil tapis akan semakin cepat mendekati sinyal yang diharapkan/diperbaiki.
4. Pada µ = 0,00008, semakin panjang tapis, maka MSE yang dihasilkan akan semakin kecil.
5. Sinyal hasil filter akan kecil bila diberi µ <
0,00008, sedangkan sinyal error akan besar karena sinyal informasi dianggap juga sebagai artefak.
6. Untuk artefak interferensi arus bolak-balik dan
artefak karena pengaruh kontraksi otot bila µ >
0.00008 sinyal hasil tapis akan rusak/menjauhi yang diharapkan.
7. Sinyal hasil tapis akan sesuai yang diharapkan
bila diberikan µ = 0,00008 dan orde tapis 5 sampai dengan 8 akan tetapi pemberian panjang tapis lebih dari 15 menghasilkan sinyal hasil tapis semakin menjauhi dari hasil yang diharapkan/rusak.
8. Dapat meminimalkan/menghilangkan level artefak tertinggi (1).
5.2 Saran
1. Perlu diaplikasikan algoritma lain untuk filter adaptif penghilang derau yaitu algoritma RLS (recursive least square) dan algoritma LS (least square).
2. Dapat dilakukan percobaan pada aplikasi lain dari filter adaptif, yaitu identifikasi sistem, prediksi sinyal dan inverse identifikasi sistem. 3. Perlu diaplikasikan penekanan artefak
menggunakan tapis adaptif FIR secara waktu-nyata (real time)
4. Untuk waktu selanjutnya penekan artefak menggunakan tapis adaptif FIR dapat dikembangkan pada artefak karena pengaruh standarisasi sebagai contoh standarisasi yang berlebihan atau defleksi sebagai contoh defleksi karena pengaruh unit pompa infuse.
Panjang
Tapis MSE
0,008 1 16,9647
5 ≥ 250286621,0406
10 ≥ 250286621,0406
15 ≥ 250286621,0406
0,0008 1 20,4983
5 16,9042
10 14,7632
15 342,0994
0,00008 1 24,7132
5 22,1263
10 21,8324
DAFTAR PUSTAKA
[1]
Bernard Widrow, Robert C. Goodlin et al., " Adaptive Noise Cancelling: Principles and Applications”, Proceedings of the IEEE, vol. 63, pp. 1692-1716, Dec. 1975 [2] Bonard Renaldi, Perbandingan KinerjaAlgoritma Lms Dan Algoritma Genetik Untuk Filter Adaptif Penghilang Noise, Tugas Akhir, Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, 2002.
[3] Couch II, Leon W.Digital And analog Communication System, fifth Edition. . Prentice-Hall, Int, 1997.
[4] Hayes, M.H., Statistical Digital Signal Processing and Modeling, New York: John Wiley & Sons, Inc, 1996.
[5] Haykin, S., Adaptive Filter Theory, Second Edition, Prentice-Hall, Englewood-Cliffs, NJ, 1991.
[6] Ifeachor, C. E., Jervis, B.W., Digital Signal Processing A pratical Approach, Addison-Wesley Publishing Company, Wokingham, 1993.
[7] Karim Sjukri dan Kabo Peter, EKG dan Penanggulangan Beberapa Penyakit Jantung untuk Dokter Umum, Fakultas Kedokteran Universitas Indonesia, 1996. [8] Kue, R., Introduction To digital Digital
Processing, McGraw-Hill International Edition, New York, 1988.
[9] Little, N, John dan ShureLoren MathWorks, Signal Processing Toolbox for Use with Matlab, User’s Guide, The MathWorks. Inc, May. 1993.
[10] Mervin J. Goldman, MD., Nora Goldschlager, MD., Elektrokardiografi, Widya Medika, Cetakan I : 1991.
[11] Meurs, A. A. H. dan Arntzenius, A. C., Elektrokardiografi Praktis, Edisi kedua. Hipokrates, 1990.
[12] Parks T.W and Burrus C.S.Digital Filter Design.New York NY,1987.
[13] Proakis, J.G. dan Manolakis, D.G., Pemrosesan Sinyal Digital, Jilid 1, Prenhalindo, Jakarta, 1997.
[14] Raharjo, J., Tjondronegoro, S., Efendi M.R., “Inverse Filtering untuk Sistem Akustik Ruangan”, Jurnal Penelitian dan Pengembangan TELEKOMUNIKASI, Vol 7 No. 2, 78-85, Desember 2002
[15] Sihono, C., Perancangan dan Implementasi Filter Adaptif pada FPGA, Tugas Akhir, STT Telkom, Bandung, 2003
[16] Wahab, A. Samik DSAK, Kuliah Dasar-dasar EKG Anak, Widya Medika, Cetakan I : 1994. [17] Widrow, B. and Stearns, S., Adaptive Signal
Processing, Prentice-Hall, Englewood Cliffs, NJ, 1985.
[18] Wirnitzer, B., Prof. , Adaptive Filter A Matlab (Nano) Toolbox and Laboratory Exercises, ver. 1.0, FH-Mannheim, Institut főr digitale Signalverarbeitung, Oct. 1999.
[19] ---, The Student Edition of MATLAB High-Performance Numeric Computation and Visualization Sofware, Version 4 User’s Guide, Prentice-Hall, Englewood Cliffs, NJ, 1995.
[20] ---, Filter Design Toolbox for Use with MATLAB, Version 2 User’s Guide, The MathWorks. Inc, Sept. 2000.
[21] …….http://cnx.rice.edu/content/m10481/ latest/
Penulis adalah mahasiswa Ekstensi Jurusan Teknik Elektro Universitas Diponegoro angkatan 2002, dengan konsentrasi Telekomunikasi. Saat ini sedang menyelesaikan S1 di Jurusan Teknik Elektro UNDIP Semarang.
Menyetujui, Pembimbing I
Wahyudi, S.T., M.T. NIP. 132 086 662
Pembimbing II