208
Pemodelan Simulasi Sistem Kontrol Temperatur
Berbasis Fuzzy Logic pada Automatic Greenhouse
Rika Novita Wardhani
1, Amanda Ayu Shafira
2Jurusan Teknik Elektro/Program Studi Instrumentasi dan Kontrol Industri, Politeknik Negeri Jakarta, Jl.Prof.DR.G.A.Siwabessy, Kampus UI, Depok, 16425, Indonesia
E-mail: [email protected]
1, amandayu95@ gmail.com
2Abstrak
Keterbatasan lahan pertanian di wilayah perkantoran akan memicu berkurangnya pasokan bahan pangan, salah satunya adalah komoditas holikultura. Pembuatan greenhouse menjadi sisasat untuk tetp dapat menanam tumbuhan holtikultura meski di lahan yang terbatas. Temperatur merupakan factor yang dapat mempengaruhi pertumbuhan hortikultura. Oleh karena itu, diperlukan sesuatu system yang dapat bekerja secara otomatis untuk menjaga temperature sesuai dengan kebutuhan tanaman. Hal tersebut sesuai dengan standar ISO/IEC 11179 bahwa system greenhouse yang ideal dapat mengatur 9 objek penyusun system greenhouse secara otomatis, salah satunya adalah temperatur udara. Solusi yang dibuat dalam penelitian ini adalah melakukan modifikasi pada system pengatur temperatur automatic greenhouse dengan menambahkan unit pendingin berupa kipas DC yang terintegrasi dengan elemen thermoelectric dan bekerja dengan cara mengatur temperature elemen coldsink yang menempel pada sisi dingin thermoelectric menggunakan metode logia fuzzy. Plant automatic greenhouse berbentuk kubus dan tersusundari dinding berbahan kaca di ke-4 sisinya, untuk atap dan lantai terbuat dari bahan kayu dan termasuk model proses IPDT karena nilai temperature yang dikendalikan tanpa controller terus menerus membesar dan tidak mencapai kestabilan. Pengujian pemodelan system control temperature automatic greenhouse menggunakan kontrol logika fuzzy menghasilkan parameter performansi rise time sebesar 108,42 detik dan settling time (ts) sebesar 190,42 detik. Pada kondisi steady respon pengujian mampu menunjukkan kondisi temperature rata-rata sebesar 25,32 0C
yang artinya memiliki error steady state (ess) sebesar 1,3 %
Kata kunci: Pemodelan System Kontrol Temperatur, Kontrol Logika Fuzzy, Parameter Performansi Sistem
Abstract
Limited agricultural land in urban areas will trigger a reduction in food supplies, one of which is a horticultural commodity. Making a greenhouse is a strategy to continue to be able to plant horticulture even in limited land. Temperature is a factor that can affect horticultural growth. Therefore, we need a system that can work automatically to maintain the temperature in accordance with the needs of plants. This is in accordance with ISO / IEC 11179 standard that an ideal greenhouse system can regulate 9 objects composing the greenhouse system automatically, one of which is air temperature. The solution made in this research is to modify the automatic greenhouse temperature control system by adding a cooling unit in the form of a DC fan that is integrated with the thermoelectric element and works by regulating the temperature of the coldsink element attached to the thermoelectric cold side using the fuzzy logic method. Automatic cube greenhouse plant and composed of walls made of glass on all four sides, for the roof and floor are made of wood and are included in the IPDT process model because the temperature value is controlled without a controler continuously enlarged and does not achieve stability. Testing the modeling of an automatic greenhouse temperature regulation system using fuzzy logic control produces rise time performance parameters of 108,42 seconds and settling time (ts) of 190,42 seconds. In the steady state the test response is able to show an average temperature condition of 25.32ºC which means it has a steady state error (ess) of 1.3%.
209
PENDAHULUAN
Keterbatasan lahan pertanian di wilayah perkotaan akan memicu berkurangnya pasokan bahan pangan, salah satunya adalah komoditas holtikultura. Pembuatan greenhouse menjadi siasat untuk tetap dapat menanam tumbuhan holtikultura meski di lahan yang terbatas. Greenhouse memiliki arti sebagai media yang digunakan untuk mengendalikan dan menjaga keadaan iklim, serta lingkungan di dalam suatu ruangan atau bisa disebut dengan iklim buatan untuk mengoptimalkan pertumbuhan tanaman. Temperature merupakan factor yang dapat mempengaruhi pertumbuhan holtikultura. Oleh karena itu, diperlukan system otomatis yang dapat mengatur temperature ruang greenhouse. Hal tersebut sesuai dengan standar ISO/IEC-11179, system greenhouse yang ideal adalah yang dapat mengatur Sembilan objek secara otomatis, salah satunya adalah temperature ruang greenhouse.
Mengatur temperature greenhouse dengan merancang actuator pengendali iklim mikro di greenhouse telah diteliti [1]. Sistem dapat bekerja dengan baik karena dapat menstabilkan temperature mencapai akurasi 95,46%. Akan tetapi, system menggunakan aktuator sangat banyak yaitu lima buah kipas dan dua diantaranya menggunakan kipas bertegangan AC agar suhu dapat turun lebih cepat. Merancang kipas angin pengatur suhu dan kelembaban udara menggunakan elemen pendingin peltier sudah diteliti oleh [2], cara kerjanya berupa pengaturan kecepatan putaran kipas DC menggunakan metode fuzzy. Sistem lebih efisien dalam hal pemakaian daya karena komponen yang digunakan tidak membutuhkan input tegangan yang berbeda dengan tegangan sumber, yaitu tegangan DC. Kekurangan dari system ini adalah kipas angin belum dapat bekerja secara presisi, karena tingkat akurasi pengujian antara hasil perhitungan fuzzy sugeno dengan kerja aktual kipas angin hanya 85%. Sistem buka-tutup atap menggunakan metode fuzzy untuk system pengontrolannya sudah diteliti oleh [3]. Sistem sudah bekerja secara valid, karena kerja aktual sistem telah sesuai dengan yang sudah diprogram. Namun, penggunaan buka – tutup atap membutuhkan waktu yang cukup lama dalamhal penurunan suhu dikarenakan penurunan suhu hanya memanfaatkan pertukaran dari suhu luar ruang greenhouse dan kecepatan aliran udara di luar lingkungan greenhouse yang tidak tetap.
Solusi atas permasalahan pada penelitian – penelitian sebelumnya adalah melakukan modifikasi pada system pengatur temperature ruangan dengan menambahkan unit pendingin berupa kipas DC yang diintegrasi dengan elemen thermoelectric dan bekerja dengan cara mengatur temperature elemen coldsink
yang menempel pada sisi dingin thermoelectric menggunakan metode logika fuzzy. Pengaturan tersebut bertujuan agar system pendingin dapat menghasilkan temperature sesuai dengan kondisi temperature ruang greenhouse. Bentuk rancangan Sistem Kontrol temperature automatic greenhouse adalah simulasi system. Langkah pembuatan simulasi system diawali dengan mengubah tiap blok pada blok diagram kerja system menjadi pemodelan matematis. Kemudian, pemodelan matematis tiap blok ditransformasikan menjadi fungsi alih dengan cara mengubah rumus matematis menjadi persamaan diferensial, lalu persamaan diferensial tersebut diubah ke bentuk persamaan laplace. Fungsi alih berfungsi sebagai pengganti dugaan realtime yang akan dimasukan dalam proses simulasi system. Simulasi system pada automatic greenhouse akan diuji dengan 2 nilai setpoint yang berbeda berdasarkan jenis tanaman yang dikembangkan. Pemodelan simulasi Sistem Kontrol temperature automatic greenhouse berbasis metode control logika fuzzy memberikan solusi dalam mengoptimalkan temperature udara pada ruangan greenhouse secara mudah dan ramah lingkungan karena tidak menggunakan pendingin konvensional.
METODE PENELITIAN
Konsep pemodelan perubahan temperatur pada Sistem Kontrol temperatur automatic greenhouse dapat divisualisasi ke bentuk flowchart pada Gambar 1.
210 Gambar 1 menjelaskan tentang pemodelan perubahan temperatur diawali dengan menghitung nilai temperatur sisi dingin (TTECc) dan perbedaan suhu antara sisi panas
dengan sisi dingin elemen termoelektrik (∆TTEC) pada
unit pendingin. Dua nilai tersebut akan digunakan untuk mencari nilai kalor yang dapat diserap oleh elemen termoelektrik (qc). Selanjutnya, hasil qc digunakan untuk
menghitung temperatur pada coldsink menggunakan rumus perpindahan panas konduksi. Perhitungan yang digunakan untuk memodelkan keseluruhan sistem adalah mencari nilai perpindahan kalor total (Qtotal). Perhitungan Qtotal terdiri dari dua langkah yaitu mencari besar perpindahan panas dari unit pendingin dan besar perpindahan panas dari dinding kaca greenhouse. Rumus yang digunakan untuk mencari nilai perpindahan panas dari unit pendingin adalah rumus perpindahan panas konveksi paksa. Hal tersebut dikarenakan temperatur ruang unit pendingin berpindah ke ruang greenhouse melalui udara yang dihembuskan dengan bantuan kipas. Sedangkan rumus yang digunakan untuk mencari nilai perpindahan panas dinding kaca greenhouse adalah rumus perpindahan panas konveksi bebas. Diagram blok sistem dapat dilihat pada Gambar 2.
Gambar 2. Diagram Blok Sistem
Langkah-langkah penelitian yang dilakukan adalah: 1. Studi pustaka dan literatur.
2. Pengambilan dan pengolahan data sistem serta plant greenhouse.
3. Perancangan pemodelan matematis sistem.
4. Pengujian dan analisa karakteristik respon pemodelan proses perubahan temperatur menggunakan software LabVIEW 2015.
5. Perancangan sistem kontrol berbasis kontroler logika fuzzy.
6. Pemrograman pemodelan keseluruhan sistem pada software LabVIEW 2015.
7. Pengujian dan validasi program pemodelan sistem pada software LabVIEW 2015.
8. Analisa kestabilan dan perancangan sistem pengaturan terhadap perubahan temperatur pada greenhouse dan penyusunan laporan.
HASIL DAN PEMBAHASAN
a. Data Spesifikasi dan Perancangan Model
Matematis
Data – data yang diperlukan untuk perancangan simulasi pemodelan sistem adalah data variasi tegangan input yang digunakan, data temperature sisi dingin (Tc),
temperature sisi panas (Th), serta delta temperature (∆T) yang dihasilkan elemen termoelektrik berdasarkan variasi tegangan input, data spesifikasi unit pendingin, data spesifikasi greenhouse, dan data spesifikasi sensor. Dari data-data tersebut, dapat dirancang model matematis dari tiap blok penyusun sistem kontrol kelembaban tanah yang meliputi blok proses (plant), aktuator, dan sensor.
Tabel 1. Data TEC Berdasarkan Variasi Input yang
Digunakan TEC PWM Vin Iin Tc Th ∆T 0 0,00 0,00 28,8 28,8 0,0 51 3,06 0,53 25,1 29,6 4,6 102 5,54 1,01 22,7 29,7 7,0 153 7,99 1,51 19,5 29,8 10,4 204 10,45 1,98 16,2 30,0 13,8 255 12,24 2,36 14,7 30,5 15,8
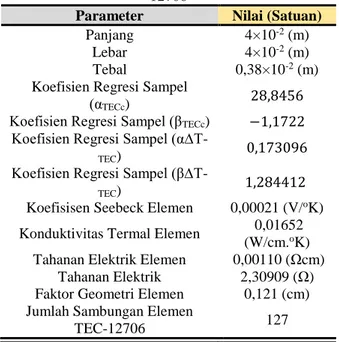
Tabel 2. Spesifikasi Elemen Termoelektrik Tipe
TEC-12706
Parameter Nilai (Satuan)
Panjang 4×10-2 (m)
Lebar 4×10-2 (m)
Tebal 0,38×10-2 (m)
Koefisien Regresi Sampel
(αTECc) 28,8456
Koefisien Regresi Sampel (βTECc) −1,1722
Koefisien Regresi Sampel
(α∆T-TEC) 0,173096
Koefisien Regresi Sampel
(β∆T-TEC) 1,284412
Koefisisen Seebeck Elemen 0,00021 (V/oK)
Konduktivitas Termal Elemen 0,01652 (W/cm.oK)
Tahanan Elektrik Elemen 0,00110 (Ωcm) Tahanan Elektrik 2,30909 (Ω) Faktor Geometri Elemen 0,121 (cm) Jumlah Sambungan Elemen
TEC-12706 127
Tabel 3. Spesifikasi Allumunium Coldsink pada Unit Pendingin Parameter Nilai (Satuan) Panjang 4×10-2 (m) Lebar 4×10-2 (m) Tebal 1,1×10-2 (m)
Konduktivitas Termal ketika Suhu Awal (29oC)
238,532 (W/m.oK)
211 Tabel 4. Spesifikasi dan Parameter Kipas DC Delta
Tipe FFB-0812EHE pada Unit Pendingin
Parameter Nilai (Satuan)
Rated Voltage 12 (VDC)
Operating Voltage Range 7 – 13,8 (VDC)
Speed 3400 (RPM)
Maximum Air Flow 1,280 (m3/min)
Panjang 8×10-2 (m)
Lebar 8×10-2 (m)
Tebal 3,8×10-2 (m)
Koefisien Perpindahan Panas Konveksi Suhu
Ruangan (28oC)
3,0291 (W/m2.oK)
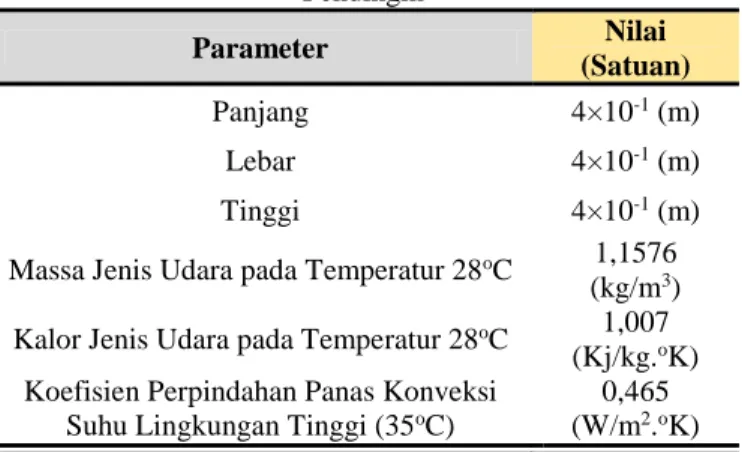
Tabel 5. Spesifikasi Allumunium Coldsink pada Unit Pendingin Parameter Nilai (Satuan) Panjang 4×10-1 (m) Lebar 4×10-1 (m) Tinggi 4×10-1 (m)
Massa Jenis Udara pada Temperatur 28oC 1,1576
(kg/m3)
Kalor Jenis Udara pada Temperatur 28oC 1,007
(Kj/kg.oK)
Koefisien Perpindahan Panas Konveksi Suhu Lingkungan Tinggi (35oC)
0,465 (W/m2.oK)
Pemodelan matematis blok proses didapatkan berdasarkan hukum kesetimbangan energi antara besar kalor yang terjadi didalam automatic greenhouse dengan besar perpindahan panas total pada automatic greenhouse, sehingga didapatkan persamaan berikut. 𝑚. 𝐶𝑢𝑑𝑎𝑟𝑎.
𝑑𝑇
𝑑𝑡 = 4 × 𝑞̇𝑑𝑖𝑛𝑑𝑖𝑛𝑔+ 𝑞̇𝑢𝑛𝑖𝑡_𝑝𝑒𝑛𝑑𝑖𝑛𝑔𝑖𝑛 (1)
Dari persamaan tersebut dilaplace-kan sehingga menjadi persamaan seperti pada diagram blok di Gambar 3.
Gambar 3. Diagram Blok Persamaan Fungsi Transfer
Pemodelan Blok Proses Sistem (greenhouse) Dengan memasukkan parameter yang terdapat pada Tabel 3, 4, dan 5 maka didapatkan persamaan fungsi transfer sebagai berikut.
𝑇𝑔ℎ(𝑠)= ( 0,06497 .𝑇𝐶𝑆(𝑠) 𝑆 + 8,3577 𝑆 ) + (308,15 − 273,15)...(2)
Pemodelan maematis aktuator didapatkan dengan mengacu pada hukum fisika perpindahan panas
konduksi dan hukum kesetimbangan energi. Berdasarkan hukum kesetimbangan energi antara besar daya input yang digunakan unit pendingin dengan besar perpindahan panas total yang dihasilkan oleh unit pendingin didapatkan persamaan berikut.
𝐷𝑎𝑦𝑎 𝑖𝑛𝑝𝑢𝑡𝑇𝐸𝐶= 𝑞̇𝑇𝐸𝐶− 𝑞̇𝑐𝑜𝑙𝑑𝑠𝑖𝑛𝑘...(3)
Dari persamaan tersebut dilaplace-kan sehingga menjadi persamaan seperti pada diagram blok di Gambar 4.
Gambar 4. Diagram Blok Persamaan Fungsi Transfer
Pemodelan Blok Aktuator Sistem (coldsink temperature)
Dengan memasukkan parameter yang terdapat pada Tabel 4 dan 5 maka didapatkan persamaan fungsi transfer sebagai berikut.
𝑇𝑐𝑜𝑙𝑑𝑠𝑖𝑛𝑘(𝑠) = 𝑉𝑖𝑛(𝑠). (−0,0205. 𝑉𝑖𝑛(𝑠)− 1,3408) +
27,9669 ...(4)
Pemodelan matematis dari temperatur transmitter dapat didekati dengan sistem orde 1 sebagai berikut. 𝑉(𝑠)
𝜇(𝑠) = 𝐺𝑉 𝑉 𝑆 + 1
... (5) Berdasarkan Datasheet sensor LM35, temperature sensor memiliki karakteristik berupa range temperatur -55 – 150 oC dan faktor ukuran linear senilai 10 mV/ oC
serta memiliki nilai time constant sensor (𝜏𝑆) senilai 1,89 detik maka didapatkan fungsi transfer dari sensor kelembaban tanah yaitu:
𝑉𝑡𝑒𝑟𝑢𝑘𝑢𝑟(𝑠)
𝑉𝑎(𝑠) =
10
1,89.𝑆 + 1 ... (6)
b. Perancangan Kontroler PI
Setelah didapatkan model matematis proses perubahan kelembaban tanah, selanjutnya dilakukan validasi model dengan simulasi menggunakan software LabVIEW 2015 untuk mengetahui respon alami perubahan kelembaban tanah. Kemudian dilakukan perancangan kontrol PI yang bertujuan untuk menghasilkan bentuk sinyal analog yang berosilasi sebelum mencapai nilai steady state. Respon dari kontrol PI akan menjadi dasar penentuan fungsi keanggotaan pada perancangan kontrol logika fuzzy. Kontrol PI diperoleh dengan menentukan nilai parameter PI yaitu nilai Kp dan Ti dengan metode tuning Ziegler-Nichols. Dari persamaan fungsi transfer pemodelan proses dan perhitungan persamaan parameter Kp dan Ti, maka diperoleh nilai parameter Kp sebesar 4,618 dan Ti sebesar 9,9. Kemudian dilakukan pengujian respon menggunakan software LabVIEW 2015.
c. Perancangan Kontroler Logika Fuzzy
212 analisis respon kontrol PI yang telah dirancang sebelumnya. Tahap perancangan logika fuzzy terdiri atas penentuan membership function (fuzifikasi), perancangan rule base, dan defuzifikasi.
Fuzifikasi
Pada tahap ini dilakukan penentuan membership function untuk variabel input dan output. Variabel input tersusun atas error dan delta error. Besar nilai error didapatkan dari hasil pengurangan antara nilai acuan (setpoint) dengan nilai keluaran plant [4]. Besar nilai masukan delta error merupakan hasil dari pengurangan nilai error sekarang dan nilai error sebelumnya. Secara fisis delta error merupakan bentuk persamaan diferensial pertama dari variabel error [5].
Fungsi keanggotaan (membership function) variabel input dan output masing – masing dikelompokkan dalam 7 himpunan, yaitu PB (Positive Big), PM (Positive Medium), PS (Positive Small), Z (Zero), NB (Negative Big), NM (Negative Medium), dan NS (Negative Small). Batas keanggotaan tiap himpunan direpresentasikan dengan menggunakan kurva segitiga. Nilai keanggotaan tiap himpunan mengacu pada respon error, delta error, maupun output kontrol PI.
Gambar 5. Grafik Respon Error
Gambar 6. Grafik Respon Delta Error
Gambar 7. Grafik Respon Output Kontroler Error
Perancangan Rule Base
Perancangan rule base digunakan sebagai aturan dasar kontrol logika fuzzy dalam mengontrol temperatur elemen coldsink yang menempel di sisi dingin elemen TEG. Perancangan rule base pada tugas akhir ini menggunakan aturan IF-THEN berdasarakan Teori MacVicar-Whelan seperti pada Tabel 6. Berdasarkan teori MacVicar-Whelan, saat variabel input dan output dibagi menjadi 7 himpunan maka diperoleh 49 aturan Fuzzy yang perlu diterapkan pada sistem.
Tabel 6. Metode Perancangan Rule Base MacVicar
Whelan Error NB NM NS Z PS PM PB dError NB NB NB NB NB NM NS Z NM NB NM NM NM NS Z PS NS NB NM NS NS Z PS PM Z NB NM NS Z PS PM PB PS NM NS Z PS PS PM PB PM NS Z PS PM PM PM PB PB Z PS PM PB PB PB PB
d. Pengujian Respon Alami
Pengujian pemodelan matematis proses greenhouse tanpa kontroler dilakukan dengan memberikan input temperatur elemen coldsink senilai 29oC pada
pemodelan proses sistem. -8.000 -6.000 -4.000 -2.000 0.000 2.000 4.000 6.000 0 500 1000 1500 2000
Grafik Respon Error
Error SetPoint -0.100 0.400 0.900 1.400 0 500 1000
Grafik Respon Derror
dError SetPoint -200.0 -150.0 -100.0 -50.0 0.0 50.0 0.00 500.00 1000.00 1500.00 2000.00 2500.00
Grafik Respon Hasil
Pengontrolan
Besar Error Temperatur pada
Greenhouse
213
Gambar 8. Grafik Respon Pemodelan Matematis
Proses Greenhouse Tanpa Kontroler
Bentuk grafik respon pada Gambar 8 menunjukan bahwa pemodelan proses sistem greenhouse termasuk model proses IPDT karena nilai temperatur yang dikendalikan tanpa kontroler terus menerus membesar dan tidak dapat mencapai kestabilan. Oleh karena itu diperlukan kontroler agar pemodelan sistem dapat mencapai temperatur sesuai setpoint.
e. Simulasi Pemodelan Sistem Kontrol Kelembaban
Tanah pada Automatic Greenhouse
Menggunakan Kontrol Logika Fuzzy dan Kontrol PI
Pengujian simulasi pemodelan Sistem Kontrol temperatur automatic greenhouse menggunakan kontrol logika fuzzy dan kontrol PI dilakukan dengan memberikan input setpoint temperatur tetap senilai 25oC
dan input temperatur lingkungan tetap sebesar 308,15oK
(35oC). Hasil pengujian tersebut direpresentasikan
dalam grafik respon pada Gambar 9 dan 10.
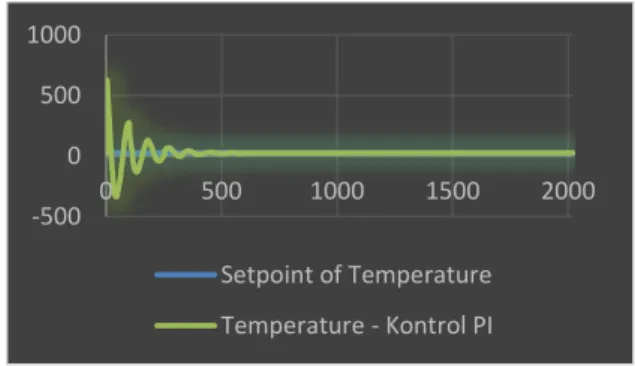
Gambar 9. Grafik Respon Sistem Kontrol Temperatur
Automatic Greenhouse Menggunakan Kontrol PI
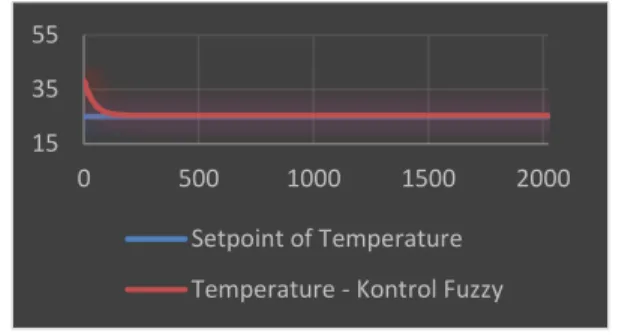
Gambar 10. Grafik Respon Sistem Kontrol
Temperatur Automatic Greenhouse Menggunakan Kontrol Logika Fuzzy
Gambar 9 dan 10 menunjukan bahwa grafik respon Sistem Kontrol temperatur automatic greenhouse menggunakan kontrol PI dan logika fuzzy dapat bergerak menuju set point yang diinginkan dan menjaga agar tetap stabil.
Tabel 7. Perbandingan Parameter Performansi Grafik
Respon Sistem Kontrol Temperatur Automatic Greenhouse Menggunakan Kontrol Logika Fuzzy dan
Kontrol PI
Kontrol Logika Fuzzy Kontrol PI Rise Time = 108,42 detik Rise Time = 603,8 detik Settling Time (ts)
𝑡𝑠 = 190,42 𝑑𝑒𝑡𝑖𝑘
Settling Time (ts) 𝑡𝑠 = 710,8 𝑑𝑒𝑡𝑖𝑘 Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,325| 25 × 100% = 1,3%
Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,006| 25 × 100% = 0,024%
Berdasarkan grafik respon Gambar 10, grafik respon kontrol PI terlihat kurang baik bila dibandingkan dengan grafik respon kontrol logika fuzzy. Hal ini terlihat dari parameter kestabilan grafik respon yang disebutkan pada Tabel 7. Grafik respon Sistem Kontrol temperatur pada automatic greenhouse menggunakan kontrol logika fuzzy memiliki parameter performansi rise time sebesar 108,42 detik dan settling time (ts)sebesar 190,42 detik. Pada kondisi steady respon pengujian diatas mempu menunjukan kondisi temperatur rata – rata sebesar 25,32oC yang artinya memiliki error steady
state (ess) sebesar 1,3%. Tetapi error steady state (ess) tersebut masih dapat ditoleransi karena kurang dari 2%.
f. Simulasi Uji TrackingSetpoint
Pengujian tracking setpoint dilakukan dengan menguji performansi kontroler logika fuzzy pada sistem kontrol temperatur automatic greenhouse menggunakan variasi input setpoint. Dengan input temperatur lingkungan sebesar 308,15oK (35oC) maka besar variasi input
temperatur setpoint yang digunakan adalah 20oC, 25oC,
27oC, dan 30oC. Hasil keempat pengujian tersebut
direpresentasikan dalam grafik respon seperti pada Gambar 11, 12, 13, 14.
Gambar 11. Grafik Respon Sistem Kontrol
Temperatur Menggunakan Kontrol Logika Fuzzy Saat Diberi Input Setpoint 20oC
-500 0 500 1000 0 500 1000 1500 2000 Setpoint of Temperature Temperature - Kontrol PI 15 25 35 45 0 500 1000 1500 2000 Setpoint of Temperature Temperature - Kontrol Fuzzy
15 65
0 500 1000 1500 2000
Setpoint of Temperature Temperature - Kontrol Fuzzy
214
Gambar 12. Grafik Respon Sistem Kontrol
Temperatur Menggunakan Kontrol Logika Fuzzy Saat Diberi Input Setpoint 25oC
Gambar 13. Grafik Respon Sistem Kontrol
Temperatur Menggunakan Kontrol Logika Fuzzy Saat Diberi Input Setpoint 27oC
Gambar 14. Grafik Respon Sistem Kontrol
Temperatur Menggunakan Kontrol Logika Fuzzy Saat Diberi Input Setpoint 30oC
Berdasarkan grafik respon Gambar 11, 12, 13, dan 14, performansi logika fuzzy pada sistem kontrol temperature automatic greenhouse dapat bekerja stabil dengan keempat variasi input setpoint yang diberikan. Hal ini terlihat dari parameter kestabilan grafik respon yang disebutkan pada Tabel 8.
Tabel 8. Parameter Performansi Sistem Kontrol
Temperatur Menggunakan Kontrol Logika Fuzzy yang Diberi Variasi Input Setpoint
Input Setpoint 20oC Input Setpoint 25oC
Rise Time = 139,1
detik Rise Time = 108,42 detik Settling Time (ts)
𝑡𝑠 = 230,1 𝑑𝑒𝑡𝑖𝑘
Settling Time (ts) 𝑡𝑠 = 190,42 𝑑𝑒𝑡𝑖𝑘 Error Steady State
(ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣|
𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 ×
100%
Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,322| 20 × 100% = 1,6% 𝑒𝑠𝑠 =|−0,325| 25 × 100% = 1,3%
Input Setpoint 27oC Input Setpoint 30oC
Rise Time = 92,81
detik Rise Time = 118,52 detik Settling Time (ts)
𝑡𝑠 = 170,81 𝑑𝑒𝑡𝑖𝑘
Settling Time (ts) 𝑡𝑠 = 175,52 𝑑𝑒𝑡𝑖𝑘 Error Steady State
(ess) 𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,33| 27 × 100% = 1,2%
Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,33| 30 × 100% = 1,1%
g. Simulasi Uji Disturbance
Uji disturbance dilakukan dengan memberikan 3 variasi input temperatur lingkungan dalam sekali pengujian. Variasi input temperatur yang digunakan adalah variasi temperatur pada pagi, siang, dan sore hari di wilayah Jakarta berdasarkan data dari BMKG [6]. Pada pagi hari besar temperatur rata-rata adalah 31,3C, pada siang hari besar temperatur rata-rata adalah 34C, dan pada sore hari besar temperatur rata-rata adalah 27,7C. Pengujian dilakukan dengan 2 cara yaitu memberikan nilai input setpoint sebesar 25oC dan 27oC. Hasil pengujian tersebut
direpresentasikan dalam grafik respon seperti Gambar 15 dan 16.
Gambar 15. Grafik Respon Uji Disturbance pada
Sistem Kontrol Temperatur Menggunakan Kontrol Logika Fuzzy yang Diberi Input Setpoint 25oC
Gambar 16. Grafik Respon Uji Disturbance pada
Sistem Kontrol Temperatur Menggunakan Kontrol Logika Fuzzy yang Diberi Input Setpoint 27oC
15 35 55
0 500 1000 1500 2000
Setpoint of Temperature Temperature - Kontrol Fuzzy
15 35 55
0 500 1000 1500 2000
Setpoint of Temperature Temperature - Kontrol Fuzzy
15 35 55
0 500 1000 1500 2000
Setpoint of Temperature Temperature - Kontrol Fuzzy
0 50
0 2000 4000
Setpoint of Temperature Temperature - Kontrol Fuzzy
0 50
0 2000 4000 6000
Setpoint of Temperature Temperature - Kontrol Fuzzy
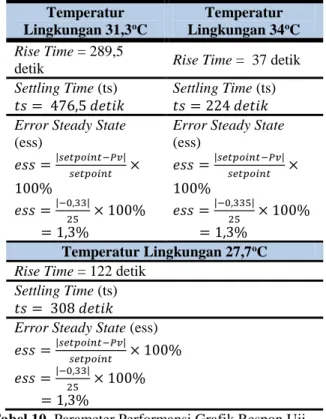
215 Berdasarkan grafik respon Gambar 35 dan 36, performansi logika fuzzy pada sistem kontrol temperature automatic greenhouse dapat membuat dan menjaga temperatur agar tetap stabil walaupun temperature lingkungan berubah – ubah. Hal ini terlihat dari parameter kestabilan grafik respon yang disebutkan pada Tabel 9 dan 10.
Tabel 9. Parameter Performansi Grafik Respon Uji
Disturbance pada Sistem Kontrol Temperatur Menggunakan Kontrol Logika Fuzzyyang Diberi Input
Setpoint 25oC Temperatur Lingkungan 31,3oC Temperatur Lingkungan 34oC Rise Time = 289,5
detik Rise Time = 37 detik Settling Time (ts)
𝑡𝑠 = 476,5 𝑑𝑒𝑡𝑖𝑘
Settling Time (ts) 𝑡𝑠 = 224 𝑑𝑒𝑡𝑖𝑘 Error Steady State
(ess) 𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,33| 25 × 100% = 1,3%
Error Steady State (ess) 𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,335| 25 × 100% = 1,3% Temperatur Lingkungan 27,7oC
Rise Time = 122 detik Settling Time (ts) 𝑡𝑠 = 308 𝑑𝑒𝑡𝑖𝑘 Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣|
𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100%
𝑒𝑠𝑠 =|−0,33|
25 × 100%
= 1,3%
Tabel 10. Parameter Performansi Grafik Respon Uji
Disturbance pada Sistem Kontrol Temperatur Menggunakan Kontrol Logika Fuzzyyang Diberi Input
Setpoint 27oC Temperatur Lingkungan 31,3oC Temperatur Lingkungan 34oC Rise Time = 264
detik Rise Time = 74 detik Settling Time (ts)
𝑡𝑠 = 439 𝑑𝑒𝑡𝑖𝑘
Settling Time (ts) 𝑡𝑠 = 249 𝑑𝑒𝑡𝑖𝑘 Error Steady State
(ess) 𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,33| 27 × 100% = 1,2%
Error Steady State (ess) 𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,34| 27 × 100% = 1,3% Temperatur Lingkungan 27,7oC
Rise Time = 12 detiko Settling Time (ts) 𝑡𝑠 = 235 𝑑𝑒𝑡𝑖𝑘
Error Steady State (ess)
𝑒𝑠𝑠 =|𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡−𝑃𝑣| 𝑠𝑒𝑡𝑝𝑜𝑖𝑛𝑡 × 100% 𝑒𝑠𝑠 =|−0,33| 27 × 100% = 1,2%
KESIMPULAN
Sistem Kontrol temperatur automatic greenhouse menggunakan kontrol fuzzy logic memiliki parameter performansi respon yang lebih baik dibandingkan sistem yang menggunakan kontrol PI, yakni rise time sebesar 108,42 detik, settling time (ts)sebesar 190,42 detik, dan error steady state (ess) sebesar 1,3%. Selain itu berdasarkan pengujian tracking setpoint dan uji disturbance, kontroler fuzzy logic dapat bekerja dengan baik dalam mengubah dan menjaga temperatur agar tetap stabil, yakni dengan settling time (ts) dibawah 500 detik dan error steady state (ess) hanya sebesar 1,2% - 1,3%.
DAFTAR PUSTAKA
[1]
Telaumbanua, M., Purwantana, B., & Lilik, S. (2014). Rancang Bangun Aktuator Pengendali Iklim Mikro di Dalam Greenhouse Untuk Pertumbuhan Tanaman Sawi, 2.[2]
Algifari. (2018). Perancangan Kipas Angin Pengatur Suhu dan Kelembapan Ruangan dengan Metode Fuzzy Sugeno Berbasis Arduino. Skripsi. Politeknik Negeri Batam. Surabaya.[3]
Azis, F., Puput, S. (2019). Rancang Bangun Smart Green Building Berbasis IoT. Skripsi Jurusan Teknik Elektro, Program Studi Instrumentasi dan Kontrol Industri. Politeknik Negeri Jakarta, Depok.[4]
Pertiwi, P. 2015. Perancangan Sistem Pengendalian Level Menggunakan Fuzzy Logic Pada Unit Deaerator 101U di Pabrik Ammonia PT. Petrokimia Gresik. Surabaya: Institut Teknologi Sepuluh Nopember.[5]
Suroso, Satya H., Puput W. 2018. Pengendalian Posisi Azimut Antena Berbasis Global Positioning System (GPS) dengan Kendali PD Fuzzy. Surabaya: Universitas Negeri Surabaya.[6]
BMKG. 2020. Prakiraan Cuaca di Jakarta Selatan.Retrieved from BMKG:
https://www.bmkg.go.id/cuaca/prakiraan
cuaca.bmkg?Kota=Jakarta%20Selatan&AreaID=5 011 3&Prov=7