DESAIN KONSEPTUAL STANG KEMUDI TRAKTOR RODA DUA
UNTUK TRANSPORTASI MENGGUNAKAN
TRAILER
MELALUI
PENDEKATAN ERGONOMIKA
BREHANS RASKAROWANA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Desain Konseptual Stang Kemudi Traktor Roda Dua untuk Transportasi MenggunakanTrailer Melalui Pendekatan Ergonomika adalah benar karya saya dengan arahan dari Prof. Dr. Ir Tineke Mandang MS dan Dr. Ir. M Faiz Syuaib M.Agr dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini. Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, November 2016
ABSTRAK
BREHANS RASKAROWANA. Desain Konseptual Stang Kemudi Traktor Roda Dua untuk Transportasi Menggunakan Trailer Melalui Pendekatan Ergonomika.
Dibimbing oleh Tineke Mandang dan M Faiz Syuaib.
Traktor roda dua merupakan salah satu mesin yang digunakan untuk membantu petani dalam membajak dan menggaru sawah, dan pengangkutan. Pendekatan ergonomika dalam perancangan suatu alat bertujuan untuk mendapatkan keserasian antra manusia dengan sistem kerja. Tujuan dari penelitian ini yaitu melakukan analisis sudut gerak dari ketiga elemen kerja yang kemudian akan dibuat dalam simulasi model (manekin) tiap percentil dan mencari gerakan yang aman untuk mengurangi resiko kerja.
Penelitian ini akan menganalisis gerakan operator saat mengendarai traktor roda dua sebagai alat transportasi. Terdapat tiga macam elemen kerja yang akan dianalisis sudut kerja operator yaitu gerakan traktor lurus, gerakan traktor belok < 45°, dan gerakan traktor belok > 45°. Tahap tersebut digunakan untuk membuat desain stang kemudi traktor roda dua yang optimum guna meningkatkan kapasitas kerja traktor untuk transportasi. Berdasarkan analisis ROM (Range Of Motion) pada tiap percentil operator bagian yang masuk ke dalam zona bahaya (zona 3) adalah bagian lutut fleksi (Kf) sedangkan yang masuk ke dalam zona waspada (zona 2) adalah bagian leher rotasi (Nr), punggung fleksi (Hf), dan bahu fleksi (Sf). Skor analisis RULA pada tiap percentil sebelum dilakukan modifikasi stang cenderung lebih besar skornya bila dibandingkan dengan skor setelah melakukan modifikasi stang.
i
ABSTRACT
BREHANS RASKAROWANA. Conceptual Design of Steering Hand Tractor for Transportation use Trailer through Ergonomics Approach.
Supervised by Tineke Mandang and M Faiz Syuaib.
Hand Tractor is one of the machines used to help farmers in conducting its activities on the farm, hand tractor is generally used for plow and rake on the farm. Designing a tool/machine needs ergonomics approach in order to match between man-machine system. The purpose of the study is to conduct an analysis of the angle of the motion of the third element of the work which will then be made in a simulation model (mannequin), percentile each and find the safe movement to reduce the risk of the work.
This research will analyze the movement of the operator while driving a hand tractor as means of transportation.. There are three kinds of elements of the work that will be analyzed i.e. operator job corner movement straight tractor, tractor movement turn < 45 °, and the movement of the tractor turn > 45 °. The stage is used to create the design of hand tractor steering resources to enhance the working capacity of tractor for transportation. Based on the analysis of the ROM (Range Of Motion), percentile operator on each part that goes into the dangerous zone (zone 3) is part of the knee flexion (Kf) while in the cautious zone (zone 2) is part of neck rotation (Nr), backs flexion (Hf), and shoulder flexion (Sf). Score analysis of RULA on each modification performed before steering percentile tend to greater his score compared to score after making modifications to your steering.
ii
DESAIN KONSEPTUAL STANG KEMUDI TRAKTOR RODA
DUA UNTUK TRANSPORTASI MENGGUNAKAN
TRAILER
MELALUI PENDEKATAN ERGONOMIKA
BREHANS RASKAROWANA
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik pada
Departemen Teknik Mesin dan Biosistem
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
v
PRAKATA
Segala puji dan syukur penulis panjatkan ke hadirat Allah SWT, karena atas limpahan rahmat dan karunia-Nya sehingga karya ilmiah dengan judul “Desain Konseptual Stang Kemudi Traktor Roda Dua untuk Transportasi Menggunakan
Trailer Melalui Pendekatan Ergonomika” ini berhasil diselesaikan.
Penelitian ini merupakan bagian dari penelitian yang menganalisis gerak kerja untuk membuat desain stang kemudi traktor roda dua yang optimum untuk lahan basah, lahan kering, dan transportasi. Dengan diselesaikannya penelitian hingga tersusunnya skripsi ini, penulis ingin menyampaikan penghargaan dan terima kasih yang sebesar-besarnya kepada:
1. Orang tua yang selalu memberikan do’a, semangat dan kasih sayangnya sehingga skripsi ini dapat terselesaikan.
2. Prof Dr Ir Tineke Mandang, MS selaku dosen pembimbing skripsi pertama, yang selalu memberikan bimbingan, masukan, dan saran-sarannya dalam menyelesaikan skripsi ini.
3. Dr Ir M Faiz Syuaib, MAgr selaku dosen pembimbing skripsi kedua, yang selalu memberikan bimbingan terkait ergonomika, masukan, dan saran-sarannya dalam menyelesaikan skripsi ini.
4. Staff Departemen Teknik Mesin dan Biosistem yang telah membantu dan memberikan ijin pelaksanaan penelitian.
5. Rekan-rekan Laboratorium Ergonomika dan seluruh teman-teman TMB angkatan 49 yang selalu memberikan masukan dan semangat selama menyusun skripsi.
Bogor, November 2016
vi
DAFTAR ISI
DAFTAR ISI vi
DAFTAR TABEL viii
DAFTAR GAMBAR viii
DATAR LAMPIRAN vii
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 2
TINJAUAN PUSTAKA 2
Traktor Roda Dua 2
Ergonomika 3
Antropometri 4
RULA 8
METODOLOGI 9
Waktu dan Tempat Pelaksanaan 9
Alat dan Bahan 9
Prosedur Penelitian 9
HASIL DAN PEMBAHASAN 21
Analisis Gerak Kerja 21
Simulasi Model Gerak Kerja yang Aman 22
Simulasi Model Percentil 5 dan 95 23
Analisis Sudut Kerja berdasarkan RULA 24
Rekomendasi Design 26
SIMPULAN DAN SARAN 32
Simpulan 32
Saran 32
DAFTAR PUSTAKA 32
vii
DAFTAR TABEL
1 Data Antropometri Petani di Wilayah Jawa 5
2 Selang gerakan pada beberapa segmen gerak tubuh 7
3 Analisis Gerak Kerja Aktual Percentil 50 21
4 Simulasi Sudut Kerja Percentil 5 23
5 Simulasi Sudut Kerja Percentil 95 24
6 Skor RULA gerakan lurus 25
7 Skor RULA gerakan belok < 45° 25
8 Ukuran design awal dan modifikasi 27
DAFTAR GAMBAR
1 Antropometri tubuh manusia yang diukur dimensinya 4
2 Selang Alami Gerakan (SAG) tubuh manusia 6
3 Bagan kesimpulan prosedur kerja RULA 8
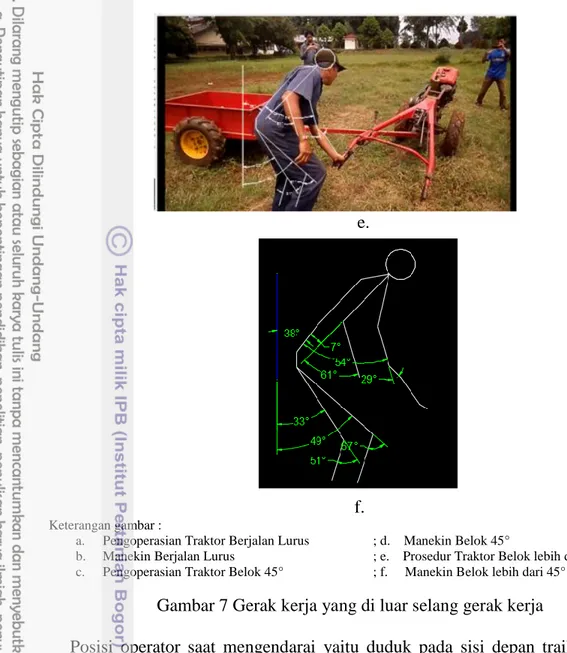
4 Worksheet RULA 8
5 Diagram alir prosedur penelitian lingkup keseluruhan 10 6 Diagram alir prosedur penelitian lingkup kecil 11
7 Gerak kerja yang di luar selang gerak kerja 14
8 Simulasi gerakan lurus (tampak atas) 15
9 Simulasi belok < 45° 15
10Simulasi belok > 45° 16
11Pembuatan model manekin percentil 50 18
12Simulasi pengoperasian traktor awal 19
13Simulasi perbaikan sudut gerak operator 19
14Desain stang kemudi awal 28
15Desain stang kemudi perbaikan 28
16Desain tempat duduk awal 29
17Desain tempat duduk perbaikan 29
18Desain pijakan kaki awal 30
19Desain pijakan kaki perbaikan 30
20Jarak permukaan roda dengan tinggi stang awal 31 21Jarak permukaan roda dengan tinggi stang perbaikan 31
DAFTAR LAMPIRAN
1 Gerakan diluar selang gerak kerja saat pengoperasian 35
2 Pengukuran antropometri satu operator 36
3 Data Pengukuran antropometri satu operator 37
4 Perhitungan RULA manual percentil 5 (Lurus awal) 38 5 Perhitungan RULA manual percentil 5 (Lurus perbaikan) 38 6 Perhitungan RULA manual percentil 5 (Belok < 45° awal) 39 7 Perhitungan RULA manual percentil 5 (Belok perbaikan) 39 8 Perhitungan RULA manual percentil 50 (Lurus awal) 40
viii
9 Perhitungan RULA manual percentil 50 (Lurus perbaikan) 40 10Perhitungan RULA manual percentil 50 (Belok < 45° awal) 41 11Perhitungan RULA manual percentil 50 (Belok perbaikan) 41 12Perhitungan RULA manual percentil 95 (Lurus awal) 42 13Perhitungan RULA manual percentil 95 (Lurus perbaikan) 42 14Perhitungan RULA manual percentil 95 (Belok < 45° awal) 43 15Perhitungan RULA manual percentil 95 (Belok perbaikan) 43
1
PENDAHULUAN
Latar Belakang
Penggunaan traktor tangan di Indonesia sudah cukup meluas, namun penelitian dari segi ergonomika masih belum banyak dilakukan, terutama mengenai kenyaman kerja pada waktu operator mengoperasikannya. Traktor tangan dinilai sesuai untuk kondisi pertanian di Indonesia yang umumnya mempunyai petak-petak lahan yang relatif kecil, kelebihan lainya yaitu harga traktor tangan relatif lebih murah dibandingkan dengan traktor roda empat.
Mesin-mesin pertanian yang digunakan di Indonesia sebagian besar merupakan mesin-mesin import, sehingga mesin tersebut dirancang dan dibuat berdasarkan ukuran fisik operator negara pembuatnya seperti Jepang, Eropa, dan Amerika. Karena ketidaksesuaian antara dimensi traktor roda dua serta trailer
dengan dimensi tubuh (antropometri) operator Indonesia menyebabkan operator itu sendiri mengalami kesulitan dalam hal pengoperasian traktor tersebut untuk transportasi, hal ini dapat dilihat saat traktor berjalan belok dimana operator umumnya menggunakan satu tangan saat posisi belok.
Menurut Nafchi (2011) bahwa design stang kemudi untuk pengoperasian traktor roda dua dengan trailer yang ada selama ini yang dipasang pada badan traktor mempunyai kelemahan. Kelemahan tersebut ketika traktor berbelok, stang traktor menjauh dari posisi kendali operator karena stang sudah belok mengikuti badan traktor sedangkan trailer belum.
Penggunaan satu tangan saat berjalan belok ini akibat operator menginginkan traktor tersebut memiliki radius putar yang tinggi seperti pada kendaraan motor pada umumnya. Sedangkan fungsi utama dari traktor sendiri yaitu digunakan untuk pengolahan lahan seperti membajak ataupun menggaru tanah dimana traktor harus memiliki nilai traksi yang besar, apabila traktor tangan itu sendiri dipasang sistem steering wheel seperti pada mobil tentu akan mempengaruhi nilai traksi yang akan dihasilkan traktor itu sendiri saat membajak/menggaru lahan. Sedangkan di Indonesia penggunaan traktor tangan/ roda dua ini digunakan sebagai sumber tenaga penggerak pompa irigasi, membajak, menggaru, dan transportasi. Traktor roda dua yang digunakan untuk penelitian ini merupakan traktor roda dua merk Yanmar type Bromo DX yang biasanya digunakan untuk membajak, menggaru pada lahan basah/ kering, dan biasa digunakan juga sebagai tenaga penggerak pompa irigasi, serta digunakan untuk transportasi untuk memindahkan hasil panen. Pada penelitian ini menganalisis penggunaan traktor untuk transportasi. Karena ketidaksesuaiaan dari prosedur pengoperasiaan traktor untuk transportasi menyebabkan operator mengalami kelelahan saat mengendarai traktor, dampak lainnya yaitu cidera ataupun kecelakaan kerja. Alternatif yang digunakan untuk menghindari kondisi tersebut yaitu Human Engineering atau Ergonomika perlu diperhitungkan.
Perhitungan ergonomika dilakukan agar petani di Indonesia dapat bekerja lebih baik dalam menggunakan mesin-mesin pertanian, khususnya traktor tangan/ traktor roda dua. Keuntungan lain dari perhitungan ergonomika yang dapat memodifikasi traktor tangan agar sesuai dengan kondisi fisik/ antropometri petani di Indonesia dimana energi yang dikeluarkan petani Indonesia saat penggunaan
2
traktor tangan relatif lebih sedikit, hasil yang optimum serta cidera dan kecelakan kerja dapat di hindari.
Penentuan posisi kerja dalam mengoperasikan traktor roda dua yang optimum sangat berkaitan dengan ukuran anthropometri operator itu sendiri. Data anthropometri tersebut perlu dibuat dalam bentuk model database (basis data), hal ini dilakukan agar dapat diperoleh informasi secara cepat dan mudah serta dapat digunakan dalam jangka panjang. Karena data anthropometri merupakan data yang penting dalam hal mendesain ataupun memodifiaksi mesin-mesin yang sudah ada agar lebih sesuai dengan ukuran tubuh operator ataupun petani di Indonesia.
Perumusan Masalah
Perumusan masalah dalam penelitian ini yaitu melakukan pendekatan antara manusia dengan alat (traktor roda dua dan trailer) serta prosedur pengoperasian traktor roda dua untuk transportasi, agar tercipta keseimbangan/ keserasiaan melalui pendekatan ergonomika. Pendekatan ergonomika ini akan digunakan untuk menciptakan suatu desain stang kemudi traktor roda dua yang baru untuk menghasilkan agar kinerja operator lebih optimum dalam mengoperasikan traktor roda dua untuk transportasi.
Tujuan Penelitian
Penelitian ini dilakukan dengan tujuan sebagai berikut:
1. Mengidentifikasi kesesuaiaan gerak kerja pengoperasian traktor roda dua untuk transportasi terhadap Range of Motion.
2. Membuat model simulasi posisi dan gerakan yang aman untuk mengurangi resiko kerja dalam mengoperasikan traktor roda dua untuk transportasi.
3. Membuat desain konseptual stang kemudi traktor roda dua yang optimum guna meningkatkan kapasitas kerja traktor untuk transportasi.
Ruang Lingkup Penelitian
Penelitian ini dilakukan untuk mendesain sebuah stang traktor roda dua yang optimum, dimana stang ini di desain berdasarkan analisi gerak petani di Jawa persentil 5, 50,dan 95 dengan tiga macam gerakan traktor lurus, traktor belok <45°, dan traktor belok >45°.
Penelitian dilakukan untuk menentukan panjang stang , tinggi stang, lebar stang, serta sudut kerja stang yang ergonomis dan masih dalam lingkup
Range of Motion.
TINJAUAN PUSTAKA
Traktor Roda Dua
Penggunaan traktor roda dua atau sering disebut sebagai traktor tangan sudah cukup banyak dikalangan petani dibandingkan dengan penggunaan hewan
3
ternak, baik untuk pengolahan lahan ataupun untuk transportasi (pengangkutan hasil panen). Traktor roda dua ini digerakkan oleh motor penggerak dengan bahan bakar bensin, solar ataupun kerosin yang dapat dipakai untuk mengolah tanah, transportasi ataupun sebagai motor penggerak untuk pompa irigasi, traktor tangan ini memiliki tenaga 2-10 Hp dimana dalam pengoperasiannya operator berjalan kaki saat pengolahan lahan, dan duduk saat penarikan trailer menggunakan traktor tangan yang digunakan untuk transportasi.
Penggunaa traktor tangan yang awalnya digunakan untuk pengolahan lahan, kini menjadi multi fungsi. Salah satu yang saya teliti yaitu terkait analisis sudut gerak operatorsaat mengoperasikan traktor untuk transportasi. Ketidaksesuaiaan antara dimensi tubuh operator di Indonesia dengan dimensi traktor roda dua beserta trailer buatan luar negeri mengakibatkan ketidaksesuaian dalam prosedur pengoperasian serta penggunaan pada traktor roda dua itu sendiri.
Menurut Nafchi (2011), menyatakan bahwa design stang kemudi untuk pengoperasian traktor roda dua dengan trailer yang ada selama ini yaitu dipasang pada badan traktor mempunyai kelemahan. Kelemahan tersebut ketika traktor berbelok, stang traktor menjauh dari posisi kendali operator karena stang sudah belok mengikuti badan traktor sedangkan trailer belum.
Menurut Nasir (2001) menyatakan bahwa mengemudikan traktor tangan dengan gandengan (trailer) harus disertai dengan kemampuan memperkirakan posisi gandengan, karena operator akan duduk diatas gandengan pada posisi dimana tangan operator mampu menjangkau posisi terjauh dari stang kemudi.
Ergonomika
Istilah “ergonomi” berasal dari bahsa latin yaitu ergon (kerja) dan nomos (hukum alam). The International Ergonomics Association (IEA) mendefinisikan ergonomika sebagai disiplin ilmu yang mempelajari pemahaman dasar tentang interaksi antara manusia dan bagian lain dari sistem yang berkontibusi pada rancangan tugas, produk, pekerjaan, dan lingkungan agar sesuai kebutuhan, kemampuan dan keterbatasan manusia.
Menurut Syuaib (2003), pendekatan ilmu ergonomi adalah penerapan secara sistematis dari informasi yang terkait tentang kemampuan, keterbatasan, karakteristik, sifat , dan motivasi manusia untuk mendesaian suatu benda dan prosedur yang digunakan manusia dan lingkungan tempat mereka berada. Menurut Nurmianto (2004), ergonomi juga memberikan peranan penting dalam meningkatkan faktor keselamatan dan kesehatan kerja. Misalnya : desain suatu sistem kerja untuk mengurangi rasa nyeri dan ngilu pada sistem kerangka dan otot manusia.
Menurut Haning (2013), implementasi dari ilmu ergonomika untuk merancang sebuah sistem yang lebih baik adalah dengan cara menghilangkan aspek-aspek dari sebuah sistem yang menghasilkan hal-hal yang tidak diinginkan, tidak dapat dikontrol dan tidak dapat diperhitungkan, seperti ketidakefisienan, kelelahan kerja, kecelakaan kerja, cidera, kesalahan kerja, kesulitan pengguna, dan rendahnya semangat kerja.
Berdasarkan penelitian sebelumnya dapat disimpulkan bahwa pendekatan ergonomika ini memiliki tujuan untuk memperbaiki serta meningkatkan performansi dari sistem dengan memperbaiki interaksi antar mesin dengan
4
manusia, sehingga tercipta suatu desain ataupun sistem kerja baru yang lebih optimum.
Antropometri
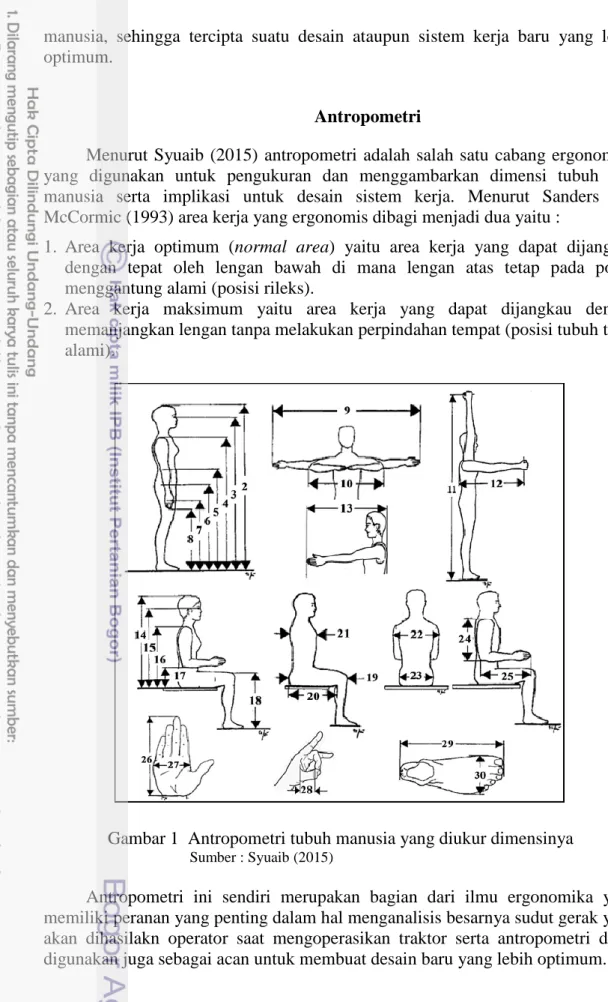
Menurut Syuaib (2015) antropometri adalah salah satu cabang ergonomika yang digunakan untuk pengukuran dan menggambarkan dimensi tubuh dari manusia serta implikasi untuk desain sistem kerja. Menurut Sanders dan McCormic (1993) area kerja yang ergonomis dibagi menjadi dua yaitu :
1. Area kerja optimum (normal area) yaitu area kerja yang dapat dijangkau dengan tepat oleh lengan bawah di mana lengan atas tetap pada posisi menggantung alami (posisi rileks).
2. Area kerja maksimum yaitu area kerja yang dapat dijangkau dengan memanjangkan lengan tanpa melakukan perpindahan tempat (posisi tubuh tetap alami).
Gambar 1 Antropometri tubuh manusia yang diukur dimensinya
Sumber : Syuaib (2015)
Antropometri ini sendiri merupakan bagian dari ilmu ergonomika yang memiliki peranan yang penting dalam hal menganalisis besarnya sudut gerak yang akan dihasilakn operator saat mengoperasikan traktor serta antropometri dapat digunakan juga sebagai acan untuk membuat desain baru yang lebih optimum.
5
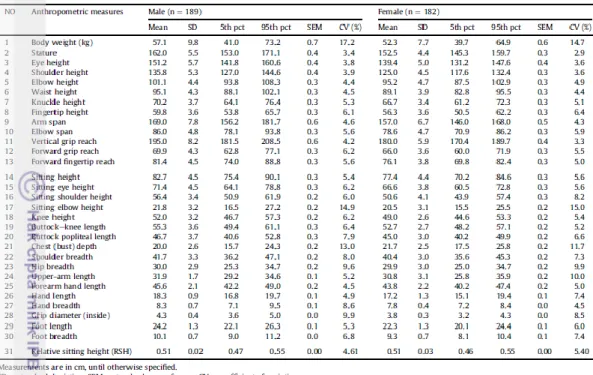
Tabel 1 Data antropometri petani di Pulau Jawa
Sumber : Syuaib (2015)
Selang Alami Gerak
Tubuh manusia adalah sebuah sistem mekanis yang mengikuti aturan hukum-hukum fisika (Bridger 2003). Menurut Barnes (1980) diacu dalam Syuaib (2015), study gerak (motion study) merupakan salah satu cabang dalam kajian ergonomi yang lazim dilakukan guna mendesain suatu metode atau prosedur atau cara kerja yang efektif – yaitu dengan effort sekecil mungkin untuk mendapatkan hasil sebaik mungkin – dimana prosedur atau metode kerja tersebut juga harus sesuai dengan karakteristik orang yang melakukannya.
Selang Gerak Alami (SAG) atau Range of Motion (ROM) menurut Syuaib (2015), adalah rentang angular gerakan persendian yang secara alami dapat dilakukan oleh manusia normal pada setiap segmen tubuhnya. Terdapat empat zona yang dihadapi manusia ketika duduk atau berdiri (Openshaw 2006), yaitu: 1. Zona 0, yaitu merupakan zona yang dianjurkan untuk melakukan sebagian
besar gerakan. Pada zona ini terdapat tekanan minimal pada otot dan sendi. 2. Zona 1 (zona hijau), yaitu zona dimana terjadi pergerakan sendi yang
lebih besar dari zona 0, merupakan zona yang masih dianjurkan untuk melakukan sebagian besar gerakan.
3. Zona 2 (zona kuning), yaitu zona dimana terdapat banyak posisi tubuh yang ekstrim. Pada zona ini terdapat lebih besar tekanan pada otot dan sendi.
4. Zona 3 (zona merah), yaitu zona dimana terdapat sangat banyak posisi tubuh yang ekstrim, sebaiknya dihindari jika memungkinkan, terutama ketika mengangkat beban berat atau kegiatan yang dilakukan berulang- ulang.
6
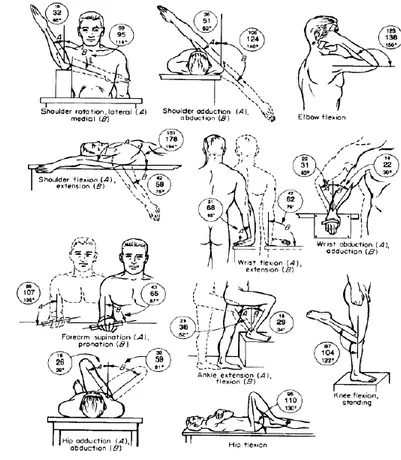
Zona-zona diatas merupakan selang gerak dimana anggota gerak tubuh dapat bergerak secara bebas. Pada selang gerak alami terdapat gerakan pergelangan tangan, punggung, tulang belakang dan kaki. Gerakan-gerakan tersebut terdiri atas gerakan fleksi (flexion), ekstensi (extension), deviasi ulnar (ulnar deviation), adduksi (adduction), abduksi (abduction), membengkok kesamping (lateral bend) dan berputar (rotation). Gerakan fleksi (flexion) adalah pergerakan dari segmen tubuh dikerenakan penurunan sudut pada sendi, seperti membengkokkan pergelangan tangan, bahu, punggung dan kaki. Ekstensi (extension) merupakan pergerakan yang berlawanan arah dengan fleksi yang disebabkan penambahan sudut pada sendi, seperti meluruskan pergelangan tangan, bahu, punggung dan kaki. Adduksi (adduction) merupakan pergerakan segmen tubuh terhadap garis tengah tubuh seperti ketika memindahkan lengan dari posisi horizontal ke posisi vertikal. Abduksi (abduction) merupakan pergerakan segmen tubuh yang menjauhi garis tengah tubuh seperti mengangkat lengan ke samping.
Gambar 2 Selang Alami Gerakan (SAG) tubuh manusia
7
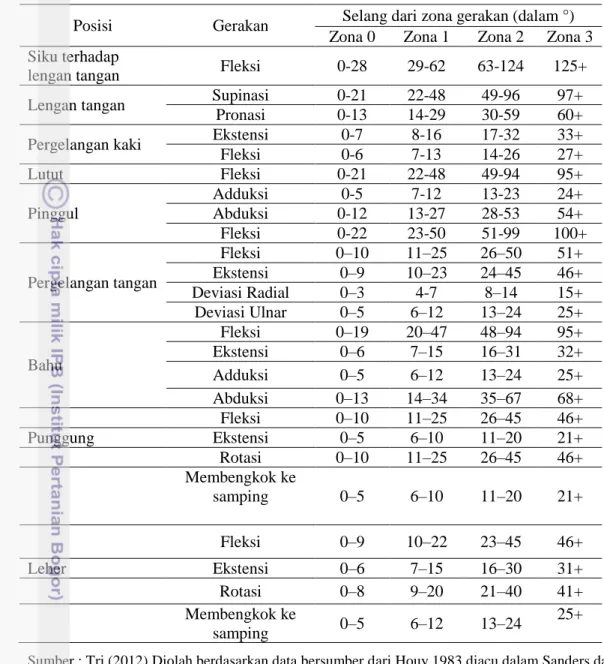
Tabel 2 Selang gerakan pada beberapa segmen gerak tubuh Posisi Gerakan Selang dari zona gerakan (dalam °)
Zona 0 Zona 1 Zona 2 Zona 3 Siku terhadap
lengan tangan Fleksi 0-28 29-62 63-124 125+ Lengan tangan Supinasi 0-21 22-48 49-96 97+
Pronasi 0-13 14-29 30-59 60+ Pergelangan kaki Ekstensi 0-7 8-16 17-32 33+ Fleksi 0-6 7-13 14-26 27+ Lutut Fleksi 0-21 22-48 49-94 95+ Pinggul Adduksi 0-5 7-12 13-23 24+ Abduksi 0-12 13-27 28-53 54+ Fleksi 0-22 23-50 51-99 100+ Pergelangan tangan Fleksi 0–10 11–25 26–50 51+ Ekstensi 0–9 10–23 24–45 46+ Deviasi Radial 0–3 4-7 8–14 15+ Deviasi Ulnar 0–5 6–12 13–24 25+ Bahu Fleksi 0–19 20–47 48–94 95+ Ekstensi 0–6 7–15 16–31 32+ Adduksi 0–5 6–12 13–24 25+ Abduksi 0–13 14–34 35–67 68+ Fleksi 0–10 11–25 26–45 46+ Punggung Ekstensi 0–5 6–10 11–20 21+ Rotasi 0–10 11–25 26–45 46+ Membengkok ke samping 0–5 6–10 11–20 21+ Fleksi 0–9 10–22 23–45 46+ Leher Ekstensi 0–6 7–15 16–30 31+ Rotasi 0–8 9–20 21–40 41+ Membengkok ke samping 0–5 6–12 13–24 25+
Sumber : Tri (2012) Diolah berdasarkan data bersumber dari Houy 1983 diacu dalam Sanders dan McCormick (1993)
Software Design
Software design Catia berfungsi sebagai sebuah software yang digunakan untuk membantu dalam hal analisis, simulasi ataupun membuat design. Software Catia ini digunakan untuk proses-proses pemodelan secara keseluruhan yang dilakuakan secara digital sehingga tidak diperlukan lagi gambar manual ataupun model fisik (Pinem 2009 diacu dalam Bani 2013).
Catia ini sendiri terdiri dari lebih dari 140 modul, salah satu modul aplikasinya yaitu proses simulasi benda kerja terhadap manusia sebagai pengendali kerjanya (operator). Simulasi dilakukan menggunakan modul aplikasi manual dari RULA (Rapid Upper Limb Assesment) dikembangkan di University of Nottingham pada tahun 1993, untuk menegvaluasi eksposisi pekerja untuk
8
faktor resiko yang mungkin menyebabkan gangguan dibagian tubuh yang mengalami ketegangan (Prandos 2011 diacu dalam Bani 2013).
RULA (Rapid Upper Limb Assesment)
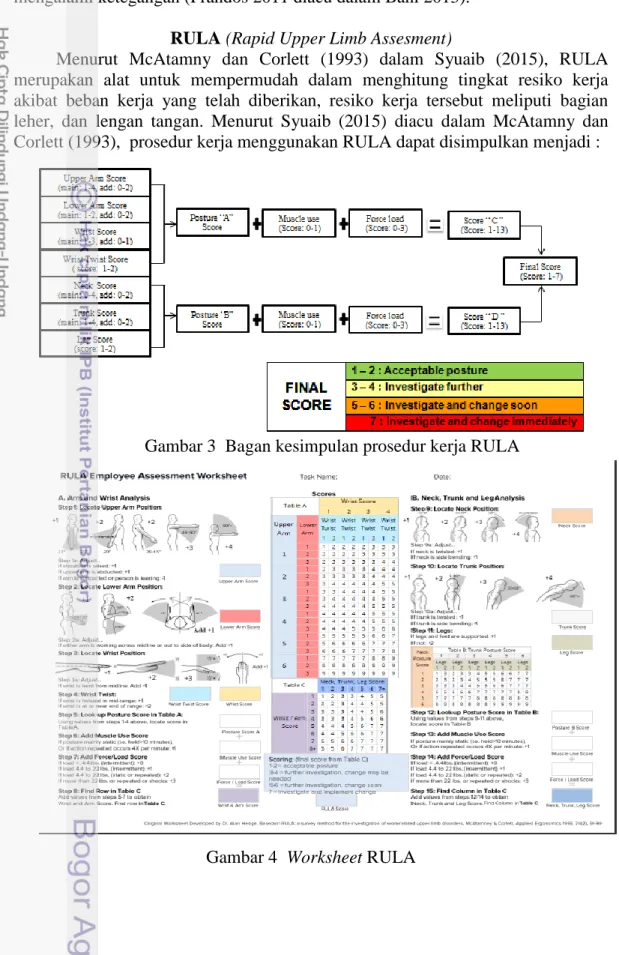
Menurut McAtamny dan Corlett (1993) dalam Syuaib (2015), RULA merupakan alat untuk mempermudah dalam menghitung tingkat resiko kerja akibat beban kerja yang telah diberikan, resiko kerja tersebut meliputi bagian leher, dan lengan tangan. Menurut Syuaib (2015) diacu dalam McAtamny dan Corlett (1993), prosedur kerja menggunakan RULA dapat disimpulkan menjadi :
Gambar 3 Bagan kesimpulan prosedur kerja RULA
9
METODE PENELITIAN
Waktu dan Tempat Pelaksanaan
Penelitian ini akan dilaksanakan pada bulan April 2016 sampai dengan bulan Oktober 2016 di Laboratorium Ergonomika, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Sedangkan pengambilan dan pengumpulan data penelitian dilakukan di Laboratorium Lapangan Siswadhi Soepardjo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan Penelitian
Alat-alat dan perlengkapan utama yang diperlukan untuk kegiatan penelitian ini meliputi peralatan untuk mengukur dimensi traktor roda dua dan trailer, mengukur ukuran tubuh operator serta software untuk membuat simulasi dan desain stang kemudi optimum. Peralatan untuk membuat desain stang kemudi traktor roda dua adalah:
a. Traktor roda dua merk Yanmar jenis Bromo DX dengan panjang traktor 2716 mm, lebar traktor 844 mm, dan tinggi traktor 1070 mm serta berat traktor 251 kg, trailer milik traktor roda dua merk Yanmar jenis Bromo DX dengan dimensi panjang trailer yaitu 1190,9 mm dan lebar trailer 870 mm, meteran,
antropometer, timbangan, alat tulis dan laptop sebagai alat pengumpul dan pengolah data.
b. Software Catia yang digunakan untuk membuat simulasi dan desain optimum stang kemudi traktor roda dua berdasarkan pendekatan ergonomika.
Prosedur Penelitian
Penelitian ini merupakan salah satu bagian dari penelitian mahasiswa S3 dengan judul Desain Ergonomis Stang Kemudi Traktor Roda Dua untuk Pengolahan Tanah dan Transportasi. Pada penelitian ini hanya menghasilkan rekomendasi design konseptual stang kemudi traktor roda dua yang optimum untuk transportasi. Tahapan penelitian ini dimulai dari tahap pendahuluan, pengolahan data, analisis data, hingga desain konseptual yang optimal berdasarkan pendekatan ergonomika. Diagram alir penelitian secara keseluruhan untuk pengolahan tanah dan transportasi dapat dilihat pada Gambar 5 sedangkan diagram alir dari penelitian design stang kemudi untuk transportasi dapat dilihat pada Gambar 6.
10
Keterangan : Diagram alir yang berada di dalam garis putus-putus merupakan lingkup penelitian yang dilakukan oleh peneliti S1.
11
Gambar 6 Diagram alir prosedur penelitian lingkup kecil
Mulai Penelitian Pendahuluan
-Pengukuran dimensi traktor roda dua dan trailer -Observasi pengamatan dilapangan terkait pengemudian traktor
-Pengukuran dimensi tubuh salah satu operator
Pengolahan Data Operator Alat Gerak kerja yang dibutuhkan Antropometri Data Dimensi Traktor roda dua dan trailer Mekanisme Kerja yang dibutuhkan Analisis kesesuian Antropometri Parameter Antropometri Terkait Pendefinisian elemen kerja
Pengambilan data aktual/ sekunder antropometri meliputi: body weight, sitting eye height, hip breadth, upper-arm lenght, sitting height, and foot breadth.
Posisi Gerakan ROM yg digunakan meliputi: siku terhadap lengan, lengan tangan, pergelangan kaki, lutut, pergelangan tangan, bahu, punggung dan leher
Pembuatan Model Manekin Gerak Kerja Analisis Gerak Kerja Simulasi Model Gerak Kerja
yg aman
Parameter desain stang sesuai 3 prcentil (fit and reach)
Pola dan data sudut gerak
Analisis resiko gerakan berdasarkan Selang Gerakan Alami atau ROM
Tingkat dan distribusi resiko gerakan setiap bagian tubuh operator
Rekomendasi Desain Koseptual stang kemudi traktor roda dua
untuk transportasi
Selesai Analisis RULA Skor Resiko Gerak
12
Tahap Pendahuluan
Tahap pendahuluan ini terdiri dari pengumpulan data sekunder dan observasi lapang. Data sekunder yang diambil meliputi: data antropometri petani di Jawa dan data ROM. Sedangkan observasi lapang berupa video cara mengemudikan traktor roda dua dengan menggunakan trailer, serta pengukuran dimensi traktor roda dua dan trailer yang digunakan dan pengukuran dimensi tubuh (antropometri) satu operator traktor roda dua.
Data dimensi traktor roda dua yang diambil yaitu jarak kemudi atau lebar kemudi (cm), tinggi stang kemudi dari permukaan tanah (cm), panjang stang kemudi (cm), diameter batang stang (cm), ukuran mesin traktor (cm), dan diameter roda traktor (cm). Sedangkan data dimensi trailer yang diambil mencakup panjang (cm) dan lebar trailer (cm), panjang dan lebar tempat duduk operator serta tinggi tempat duduk dari permukaan tanah dan juga jarak stang traktor dengan tempat duduk operator (cm), serta panjang pijakan kaki operator.
Pengolahan Data
Video pengoperasian traktor roda dua untuk transportasi oleh operator akan dijadikan berupa kumpulan foto dengan cara melakukan capture pada gerakan-gerakan yang dianggap berbahaya/ di luar selang kerja saat berkendara dapat dilihat pada Gambar 7. Hasil capture video tersebut akan dianalisis elemen gerak dan resiko yang terjadi setiap gerakannya. Setiap gerakan dicari dan digambar sudutnya dengan menggunakan Autocad. Data sudut yang telah terkumpul akan dibandingkan dengan sudut gerakan operator pada saat pengoperasian traktor dengan referensi berupa tabel selang alami gerak yang diacu dalam Tri Novita (2012) untuk dipetakan distribusi resiko gerakan yang terjadi di setiap bagian tubuh. Selain melalui video, pengolahan data anthropometri juga diperlukan. Data
antropometri yang digunakan dapat menggunakan data pengukuran dimensi tubuh satu operator secara langsung serta dapat juga menggunakan data antropometri sekunder. Pengukuran antropometri satu operator secara langsung digunakan sebagai diagnosis ataupun pembanding untuk melihat dimensi tubuh si operator tersebut termasuk dalam golongan percentil berapa dalam data antropometri
sekunder petani di pulau Jawa. Pengolahan data anthropometri sekunder (berat badan, tinggi badan, dan umur) wilayah Jawa (Syuaib 2015) digunakan untuk menganalisis kesesuain operator dalam mengemudikan traktor roda dua beserta
trailer dan pengolahan data terkait dimensi traktor roda dua serta trailer.
Berikut ini merupakan hasil identifikasi capture video yang memliki gerkana di luar selang alami gerak, pengamatan ini terdapat beberapa elemen kerja yang akan diambil antara lain: gerakan traktor saat berjalan lurus, gerakan traktor saat belok <45° dan gerakan traktor saat belok lebih dari >45°.
13
a.
b.
c.
14
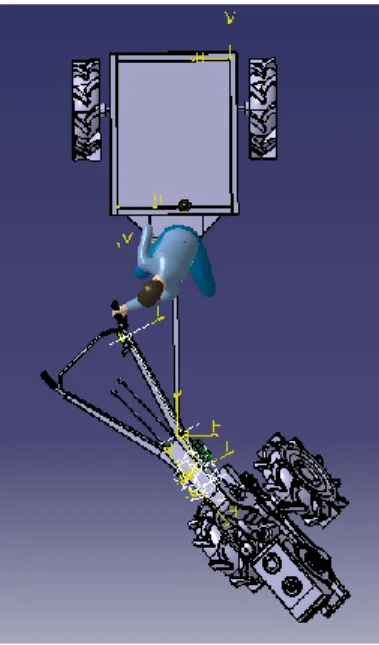
e.
f. Keterangan gambar :
a. Pengoperasian Traktor Berjalan Lurus ; d. Manekin Belok 45°
b. Manekin Berjalan Lurus ; e. Prosedur Traktor Belok lebih dari 45°
c. Pengoperasian Traktor Belok 45° ; f. Manekin Belok lebih dari 45°
Gambar 7 Gerak kerja yang di luar selang gerak kerja
Posisi operator saat mengendarai yaitu duduk pada sisi depan trailer dengan kedua tangan berada di stang traktor roda dua untuk mengatur arah jalannya traktor. Elemen kerja yang diteliti saat traktor roda dua untuk transportasi ada tiga macam yaitu:
a. Gerakan lurus : gerakan ini menunjukkan bahwa trailer dengan traktor roda dua berjalan lurus dengan posisi operator yang duduk di bagian depan trailer serta kedua tangan berada di stang traktor roda dua. Pada posisi ini operator tidak mengalami fleksi pada leher. Sedangkan bagian punggung, lutut, bahu serta siku mengalami fleksi yang masih dalam zona aman berdasarkan tabel Selang Alami Gerak.
15
Gambar 8 Simulasi gerakan lurus (Tampak Atas)
b. Gerakan belok < 45° : gerakan ini menunjukan bahwa traktor roda dua mengalami belokan dengan sudut < 45° dan trailer mengikuti gerakan traktor tersebut. Pada posisi ini operator masih duduk di bagian depan tariler namun, hanya satu tangan yang memegang stang, salah satu contohnya yaitu saat traktor ingin belok ke kiri dengan sudut < 45°, maka tangan kiri memegang stang traktor bagian kanan, dan tangan kanan memegang bagian trailer untuk menjaga keseimbangan. Pada kaidah ergonomika gerakan tangan ini telah melewati area garis tengah tubuh sehingga gerakan ini tergolong berbahaya dimana gerakan ini dapat menyebabkan traktor terguling saat menggunakan kecepatan yang cukup tinggi serta pada saat berjalan di lahan yang bergelombang. Pada posisi ini terjadi fleksi pada bagian punggung dan bahu yang masuk pada zona waspada berdasarkan tabel Selang Alami Gerak.
16
c. Gerakan belok > 45° : gerakan ini menunjukan bahwa traktor roda dua mengalami belokan dengan sudut > 45° dan trailer mengikuti gerakan traktor tersebut. Pada posisi ini operator cenderung menurunkan kakinya ke lahan/jalan dikarenakan radius putar yang terlalu besar sehingga tangan tidak mampu menjangkau saat posisi operator masih dalam posisi duduk di bagian depan trailer. Menurut kaidah ergonomika gerakan seperti ini sangat berbahaya atau sudah di luar area selang gerak kerja dikarenakan kaki operator dapat saja terlindas apabila laju traktor terlalu cepat ataupun saat kondisi jalan sedang menurun, hal ini tentu saja dapat mengakibatkan kecelakaan kerja yang dapat merugikan bagi operator sendiri ataupun orang lain yang ada di sekitarnya, sehingga untuk gerakan belok > 45° ini tidak dianjurkan untuk dilakukan karena memiliki dampak yang sangat besar.
Gambar 10 Simulasi belok > 45° (Tampak Atas)
Tahap Analisis Data
Tahap analisis data ini merupakan tahap setelah melakuakan proses pengolahan data, dimana data yang sudah diolah tersebut digunakan untuk mengetahui parameter beban kerja terhadap pengoperasian alat yang digunakan sebagai acuan perbaikan desain alat melalui tahapan sebagai berikut:
1. Range of Motion (ROM)
ROM merupakan selang gerak kerja dibuat dari informasi mengenai tingkat dan distribusi resiko gerakan setiap bagian tubuh operator. Rekaman video gerak operator dikonversi menjadi foto gerak pengoperasian traktor roda dua untuk transportasi. Kemudian foto pengoperasian traktor roda dua dan trailer dibagi menjadi 3 elemen kerja. Tahap selanjutnya setiap elemen kerja ditentukan selang gerak kerja manggunakan bantuan software
Autocad. Data selang kerja setiap elemen dianalisis dengan membagi menjadi empat zona yaitu zona nyaman, zona aman, zona waspada, dan zona berbahaya. Penggunaan ROM ini untuk mencari kondisi paling tidak menguntungkan yang mungkin terjadi, sehingga tingkat resiko gerak tinggi dapat diminimalisir. Penggunaan ROM dapat dilihat pada Tabel 2.
17
2. Simulasi Posisi dan Gerak Kerja yang Aman
Simulasi posisi dan gerak kerja yang aman di buat dari informasi mengenai tingkat dan distribusi resiko gerakan setiap bagian tubuh operator, model manekin operator dan data dimensi traktor roda dua. Pembuatan simulasi ini ditentukan parameter-parameter yang mengatur 3 unsur utama yang berpengaruh dalam ergonomi yaitu pengguna (user), alat (traktor roda dua dan trailer) dan kondisi lahan. Simulasi ini dilakukan setelah sebelumnya melakukan analisis menggunakan SAG (selang alami gerak) / ROM (Range Of Motion). Pada simulasi ini akan dihasilkan model gerakan yang aman bagi operator saat mengendarai traktor untuk transportasi. Simulasi gerakan ini juga akan digunakan sebagai modal untuk membuat suatu desain stang traktor yang baru yang telah disesuaikan dengan dimensi tubuh operator di Indonesia agar dapat menciptkan gerakan yang aman/ meminimalisir kecelakaan kerja bagi operator.
Pembuatan model manekin digunakan untuk mempermudah melakukan simulasi gerakan si operator, pembuatan manekin ini berdasarkan data antropometri yang telah diukur secara langsung oleh satu operator traktor roda dua untuk percentil 50 serta menggunakan data sekunder untuk percentil 5 dan percentil 95 berdasarkan pada Tabel 1 sedangkan data antropometri secara pengukuran langsung dapat dilihat pada Tabel 3. Dimensi tubuh (antropometri) pada masing-masing percentil akan memperangaruhi hasil sudut gerak kerja dengan gerakan yang sama. Pembuatan model manekin ini menggunakan software Catia dimana gerakan yang akan di simulasikan berdasarkan hasil capture video pengoperasian traktor roda dua untuk transportasi. Penelitian ini traktor yang digunakan sebagai sample yaitu traktor roda dua merk Yanmar Bromo Dx, proses menggambar ulang traktor roda tersebut telah dilakukan berdasarkan dimensi traktor roda dua tersebut secara langsung, hal ini dilakukan untuk mempermudah proses simulasi gerakan menggunakan manekin.
Operator yang di analisis pertama kali masuk ke dalam perwakilan operator percentil 50 berdasarkan data pengukuran antropometri secara langsung. Sudut kerja yang dihasilkan operator ini saat mengoperasikan traktor secara tiga macam gerakan, selanjutnya akan dianalisis terlebih dahulu menggunakan Tabel ROM/ SAG (Tabel 2) dimana terdapat empat zona yaitu zona nyaman (zona 0), zona aman (zona 1), zona waspada (zona 2), dan zona berbahaya (3). Pada tahap ini bagian tubuh operator yang termasuk kedalam zona berbahaya akan diubah ke dalam zona aman, hal ini dilakukan untuk meminimalisir kecelakaan ataupun tingkat kelelahan pada operator saat mengemudikan traktor roda dua. Pembuatan simulasi menggunakan model manekin ini di awali dengan membuat simulasi sesuai gerakan asli si operator berdasarkan hasil capture video, lalu setelah itu baru di buat simulasi model gerakan yang aman terhadap tiga percentil menggunakan acuan data tabel ROM untuk menghasilkan sudut gerak yang aman untuk gerakan lurus dan belok < 45º.
Parameter antropometri yang digunakan untuk analisis gerak pada penelitian ini yaitu body weight, sitting eye height, hip breadth, upper-arm lenght, sitting height, and foot breadth. Pembuatan model manekin ini
18
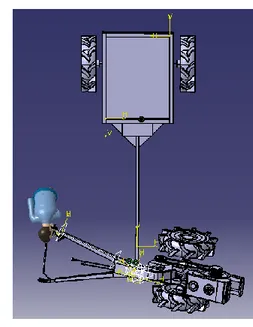
dilakukan dengan cara memasukkan data antropometri yang telah di dapat berdasarkan secara langsung ataupun menggunakan data antropometri sekunder. Posisi yang digunakan saat menginput data antropometri yaitu posisi manekin saat duduk, hal ini dikarenakan operator yang akan di analisis gerak kerja merupakan operator saat mengendarai traktor untuk transportasi dalam posisi gerakan lurus dan gerakan belok < 45°. Proses pembuatan model manekin dapat dilihat pada Gambar 11 dan pengukuran antropometri operator traktor dapat dilihat pada Lampiran 6.
Gambar 11 Proses Pembuatan model manekin
a.
19
Keterangan gambar :
a.Simulasi Traktor Berjalan Lurus Awal b.Simulasi Traktor Berjalan Lurus Perbaikan
Gambar 12 Simulasi pengoperasian traktor awal
a.
b. Keterangan gambar :
a. Simulasi Traktor Belok < 45° Awal b. Simulasi Traktor Belok <45° Perbaikan
Gambar 13 Simulasi perbaikan sudut gerak operator 3. Rapid Upper Limb Assesment (RULA)
RULA merupakan metode ergonomika yang digunakan untuk memprediksi tingkat resiko kerja, metode ini dikelompokkan menjadi dua bagian.Bagian pertama (Skor A) terdiri dari bagian bahu, siku terhadap lengan tangan, dan pergelangan tangan. Bagian kedua (Skor B) terdiri dari bagian leher, punggung, dan lutut. Setelah mendapatkan skor pada dua bagian, langkah selanjutnya yaitu mengakumulasikan kedua skor tersebut ke Skor C dimana nilai tersebut telah ditambahkan dengan faktor aktivitas kerja pada operator, misal seperti beban kerja yang di dapat oleh operator, serta gerakan tangan yang terkadang melewati garis tengah tubuh. Penilaian Skor RULA ini digunakan untuk pembanding terhadap selang gerak yang telah dihasilkan menggunakan ROM.
Analisis ini merupakan tahap yang digunakan sebagai perbandingan terkait skor yang ditunjukkan pada RULA apakah berbanding lurus dengan analisis
20
sudut kerja menggunakan ROM atau hasilnya berlawanan. Metode RULA ini dikelompokkan menjadi dua bagian.Bagian pertama (Skor A) terdiri dari bagian bahu, siku terhadap lengan tangan, dan pergelangan tangan. Bagian kedua (Skor B) terdiri dari bagian leher, punggung, dan lutut. Setelah mendapatkan skor pada dua bagian, langkah selanjutnya yaitu mengakumulasikan kedua skor tersebut ke Skor C dimana nilai tersebut telah ditambahkan dengan faktor aktivitas kerja pada operator. Skor RULA berdasarkan data sudut gerak awal ataupun sudut gerak aman/ yang telah diperbaiki dapat dilihat pada Tabel 6 (gerakan lurus) dan Tabel 7 (gerakan belok < 45º).
Tahap Desain Konseptual
Tahapan ini mencakup melakukan alternatif-alternatif desain berdasarkan kriteria desain yang telah dianaliasis melalui pendekatan ergonomika. Pada tahap ini juga akan dilakukan rekayasa prosedur/cara kerja pengoperasian traktor roda dua dan trailer. Kriteria/ target desain stang kemudi yang baru ini yaitu stang yang masih nyaman dan aman saat melakukan gerakan belok < 45º serta dapat mampu menahan beban kerja dengan baik dan juga ukurannya yang ergonomis sehingga membuat operator nyaman saat menggunakannya. Kriteria pembuatan konsep desain dilakukan dengan menganalisis gerak tubuh operator saat mengendarai traktor dengan tiga macam gerakan, melalui data antropometri petani di pulau Jawa serta analisis ROM sehingga di dapatkan sudut gerak awal operator pada tiap gerakan, sehingga dapat terlihat tiap gerakan tersebut masuk kedalam zona nyaman, aman, waspada atau berbahaya. yang aman bagi ketiga pengoperasian (gerak lurus, gerak belok < 45º, serta belok > 45º) dan ketiga ukuran tubuh manusia (percentl 5, percentil 50, dan percentil 95). Berdasarkan data sudut gerak awal maka dapat dilakukan perubahan nilai sudut pada tiap gerakan yang masuk dalam zona waspada (zona 2), di perbaiki nilaisudut geraknya agar masuk ke dalam zona aman (zona 1) berdasarkan analisis ROM. Data sudut gerak inilah yang akan di gunakan sebagai acuan/ kriterian dalam menentukan perubahan dimensi panjang, lebar, dan tinggi stang serta data antropometri tiap percentil dapat pula digunakan sebaai acuan untuk melakukan perubahan dimensi panjang dan lebar pijakan kaki serta tempat duduk operator yang baru. Konsep desain stang kemudi yang ditawarkan yaitu:
Stang kemudi yang tetap (fix), yaitu stang kemudi seperti yang ada selama ini, dimana ukuran panjang, tinggi, lebar, dan sudut kemudi dibuat tetap untuk ketiga jenis pengoperasian yang mengacu pada Selang Gerak Alami (SAG) operator lokal. Hal ini di karenakan desain fix memiliki nilai kekuatan yang lebih besar dibandingkan dengan stang yang adjustable, berdasarkan analisis tabel ROM diperlukan desain stang yang harus lebih tinggi dan lebih sempit untuk mendapatkan sudut gerak kerja yang aman untuk operator untuk mengurangi/ menghindari kelelahan/ kecelakaan kerja. Skor RULA dapat digunakan sebagi evaluasi terhadap desain stang kemudi yang baru, skor RULA yang rendah menunjukan bahwa stang kemudi tersebut optimum untuk digunakan, perhitungan skor RULA dapat dilihat pada Lampiran 4.
21
HASIL DAN PEMBAHASAN
Analisis Gerak KerjaBerikut ini data hasil analisis menggunakan Tabel ROM pada percentil 50 dapat dilihat pada Tabel 3. Sedangkan hasil analisis gerak kerja menggunakan capture video pengoperasian secara aktual dapat dilihat pada Gambar 7.
Tabel 3 Analisis gerak kerja aktual percentil 50
Tabel 3 Analisis gerak kerja aktual percentil 50 (lanjutan)
Satuan dalam (°) Keterangan:
Hr = Hip Rotation Ne = Neck Extension Ef = Elbow Flexion Nr = Neck Rotation Wf = Wrist Flexion Sf = Shoulder Flexion Se = Shoulder Extension Sab = Shoulder Abduction Kf = Knee Flexion
Zona 0 / zona aman Zona 1 / zona aman Zona 2 / zona hati-hati Zona 3 / Zona bahaya
Berdasarkan pada tabel hasil analiss gerak kerja diatas, bagian tubuh yang sering masuk pada zona bahaya yaitu lutut baik pada gerakan lurus, gerakan belok < 45° maupun gerakan belok > 45°. Sedangkan bagian tubuh yang masuk dalam zona hati-hati/ waspada yaitu bagian bahu, leher, serta siku. Pada analisis berdasarkan ROM operator yang bagian tubuhnya masuk ke dalam zona bahaya, harus segera diubah sudut geraknya agar masuk ke dalam zona aman ataupun nyaman, namun untuk bagian tubuh seperti lutut hanya bisa optimum saat sudut gerak masuk ke dalam zona waspada, hal ini dikarenakan apabila sudut gerak kerja masuk kedalam zona aman ataupun nyaman maka posisi lutut tidak bisa
Element of Work Ne Nr Hf Hr Sf Se R L R L Straight 0 0 16 0 70 59 0 0 Turn <45° 10 25 35 23 0 89 11 0 Turn >45° 15 30 38 10 95+ 95+ 0 0 Repair Straight 0 0 12 0 35 42 0 0 Repair Turn 0 19 18 0 85 0 0 17 Element of Work Sab Ef Kf Wf R L R L R L R L Straight 46 47 0 13 95+ 95+ 17 28 Turn <45° 11 7 87 11 95+ 95+ 0 0 Turn >45° 0 0 125+ 125+ 95+ 95+ 51+ 0 Repair Straight 18 18 61 47 83 82 0 15 Repair Turn 14 0 3 105 90 87 0 6
22
dijadikan sebagai tumpuan tubuh yang kuat saat mengoperasikan traktor sehingga titik tumpu akan berada pada punggung dan hal ini akan membuat operator rawan terjatuh saat mengendarai traktor. Hal ini sama halnya seperti operator yang sering melakukan gerakan belok <45° dimana bagian bahu dan siku operator telah melewati garis tengah tubuh opertor itu sendiri hal ini akan berakibat operator tersebut terjatuh saat mengendarai traktor ataupun cidera. Pada gerakan belok >45° tidak dianjurkan karena belokan tersebut terlalu tinggi radius putarnya dan telah berada diluar area selang gerak kerja berdasarkan tabel SAG sehingga mengakibatkan kaki operator harus turun ke permukaan tanah, hal ini dapat berdampak buruk bagi operator itu sendiri, salah satu contohnya yaitu kaki operator yang dapat terlindas ban traktor saat posisi jalan sedang turun ataupun saat traktor dalam kecepatan yang tinggi.
Simulasi Model Gerak Kerja yang Aman
Berdasarkan Tabel 3 terdapat beberapa data sudut gerak kerja yang masih perlu diperbaiki pada beberapa bagian tubuh operator di Indonesia berdasarkan Tabel SAG. Pada gerakan lurus untuk bagian bahu (Sf), khususnya bagaian kiri yang awalnya masuk kedalam zona waspada (zona 2) karena mengalami sudut gerak sebesar 59° diperbaiki menjadi 42° yang telah masuk kedalam zona aman (zona 1). Sedangkan pada bagian lutut yang awalnya mendapatkan sudut gerak di atas 95° dan masuk kedalam zona berbahaya (zona 3) namun setelah diperbaiki sudut geraknya menjadi 83° dan masuk kedalam zona waspada (zona 2), untuk bagian lutut ini sendiri memang tidak dapat diubah secara maksimum yang awalnya masuk dalam zona 4 hanya bisa diubah ke dalam zona 3, hal ini dikarenakan lutut tersebut digunakan sebagai titik tumpu/ penopang beban kerja pada tubuh si operator saat berkendara, apabila bagaian lutut diubah kedalam zona 1 atau bahkan zona 0 maka posisi lutut terlalu lurus sehingga kekuatan untuk menopang beban kerja dari tubuh sangat berkurang sehingga dapat mengakibatkan operator mengalami cidera atau bahkan kecelakaan kerja. Pada gerakan belok <45° bagian tubuh yang diperbaiki yakni bagian leher (Nr) yang awalnya mendapatkan sudut 25° dan masuk kedalam zona 2, namun setelah diperbaiki sudutnya menjadi 0° dan masuk kedalam zona 0. Bagian tubuh lain yang diperbaiki pada gerakan belok 45° yaitu bagian lutut yang awalnya diatas 95° (zona 3) diperbaiki menjadi 90° (zona 2). Simulasi gerakan awal menggunakan manekin dapat dilihat pada Gambar 9 sedangkan untuk simulasi gerakan yang telah diperbaiki dapat dilihat pada Gambar 10 dan untuk data sudut gerak awal maupun sudut gerak yang telah diperbaiki pada percentil 50 dapat dilihat pada Tabel 3. Simulasi gerak aman ini akan digunakan sebagai parameter untuk menentukan desain stang yang baru yang lebih sesuai dengan dimensi tubuh operator yang ada di Indonesia. Simulasi gerak aman ini akan menghasilkan desain tidak hanya pada bagian stang, namun pada bagian tempat duduk operator dan juga bagian pijakan kaki operator. Simulasi gerakan aman ini hanya digunakan untuk operator saat mengendarai traktor untuk trasportasi bukan untuk pengolahan lahan.
23
Simulasi Model Percentil 5 dan 95
Hasil simulasi percentil 5 dan 95 memlalui tahapan pembuatan simulasi model manekin yang sama seperti pada simulasi percentil 50. Data hasil simulasi sudut kerja pada percentil 5 dapat dilihat pada Tabel 4 sedangkan untuk percentil 95 dapat dilihat pada Tabel 5.
Tabel 4 Simulasi sudut kerja percentil 5
Tabel 4 Simulasi sudut kerja percentil 5 (lanjutan)
Satuan dalam (°) Keterangan:
Hr = Hip Rotation Ne = Neck Extension Ef = Elbow Flexion Nr = Neck Rotation Wf = Wrist Flexion Sf = Shoulder Flexion Se = Shoulder Extension Sab = Shoulder Abduction Kf = Knee Flexion
Zona 0 / zona aman Zona 1 / zona aman Zona 2 / zona hati-hati Zona 3 / Zona bahaya
Element of Work Ne Nr Hf Hr Sf Se R L R L Straight 0 0 16 0 59 52 0 0 Turn <45° 8 35 43 20 0 89 4 0 Turn >45° 14 30 37 10 95+ 95+ 0 0 Repair Straight 0 0 14 0 43 45 0 0 Repair Turn 0 20 20 0 72 0 0 25 Element of Work Sab Ef Kf Wf R L R L R L R L Straight 52 46 3 12 95+ 95+ 17 28 Turn <45° 14 10 90 43 95+ 95+ 8 0 Turn >45° 0 0 125+ 125+ 95+ 95+ 51+ 0 Repair Straight 18 18 69 65 90 90 0 13 Repair Turn 17 0 48 124 91 94 0 0
24
Tabel 5 Simulasi sudut kerja percentil 95
Tabel 5 Simulasi sudut kerja percentil 95 (lanjutan)
Satuan dalam (°) Keterangan:
Hr = Hip Rotation Ne = Neck Extension Ef = Elbow Flexion Nr = Neck Rotation Wf = Wrist Flexion Sf = Shoulder Flexion Se = Shoulder Extension Sab = Shoulder Abduction Kf = Knee Flexion
Zona 0 / zona aman Zona 1 / zona aman Zona 2 / zona hati-hati Zona 3 / Zona bahaya
Analisis Sudut Kerja berdasarkan RULA
Berikut ini merupakan hasil analisis RULA yang digunakan sebagai pembanding hasil analisis menggunakan tabel ROM. Skor pada RULA ini dapat digunakan juga sebagai acuan terkait hubungan antara desain yang telah dibuat dengan gerakan yang dilakukan operator.
Element of Work Ne Nr Hf Hr Sf Se R L R L Straight 0 0 20 0 64 57 0 0 Turn <45° 9 25 32 10 0 82 4 0 Turn >45° 13 30 30 10 95+ 95+ 0 0 Repair Straight 0 0 10 0 24 26 0 0 Repair Turn 0 18 15 0 64 0 0 25 Element of Work Sab Ef Kf Wf R L R L R L R L Straight 17 18 2 17 95+ 95+ 15 5 Turn <45° 6 3 72 19 95+ 95+ 0 0 Turn >45° 0 0 125+ 125+ 95+ 95+ 51+ 0 Repair Straight 18 18 58 49 84 85 0 9 Repair Turn 12 0 30 108 94 94 0 15
25
Tabel 6 Skor RULA gerakan lurus
Tabel 7 Skor RULA gerakan belok < 45°
Berdasarkan score RULA untuk gerakan lurus baik pada gerakan awal ataupun setelah mengalami perubahan sudut gerak, masing-masing masih memiki
score akhir 3 dimana artinya gerakan tersebut masih tergolong dalam gerakan yang aman, meskipun memiliki score akhir yang sama pada tiap percentil (Percentil 5, 50, dan 95) namun terdapat perubahan pada bagian tangan dimana tiap percentil yang awalnya mendapat score 3, namun setelah mengalami perbaikan sudut score menjadi berubah menjadi 1 untuk percentil 5, percentil 50 dan 95. Meskipun tangan ini merupakan bagian dari posture A namun perubahan score pada bagian tangan tidak merubah score pada posture A hal ini telah dianalisis berdasarkan Worksheet RULA dimana selang sudut pada tiap score terbut termasuk jauh. Sehingga tidak menutup kemungkinan apabila dalam menganalisis sudut gerak menggunakan RULA mendapatkan score yang sama pada ketiga percentil (percenti 5, 50, dan 95).
Score RULA untuk gerakan belok < 45° memiliki perubahan score yang sangat signifikan dari score berdasarkan sudut gerak awal memiliki score akhir RULA sebesar 7 untuk ketiga percentil, namun setelah mengalami perbaikan sudut gerak score akhir RULA menjadi 3. Kedua score pada gerakan awal baik
Posture Score Percentil 5 Score Percentil 50 Score Percentil 95 Before After Before After Before After
Shoulder 4 3 4 3 4 3 Arm 2 2 2 2 2 2 Hand 3 1 3 1 3 1 Twist 1 1 1 1 1 1 Neck 1 1 1 1 1 1 Trunk 2 2 2 2 2 2 Leg 1 1 1 1 1 1 Posture A 4 4 4 4 4 3 Posture B 2 2 2 2 2 2 Finally 3 3 3 3 3 3
Posture Score Percentil 5 Score Percentil 50 Score Percentil 95 Before After Before After Before After
Shoulder 4 4 4 4 4 4 Arm 3 2 3 2 3 2 Hand 3 2 2 2 2 2 Twist 1 1 1 1 1 1 Neck 5 2 5 2 5 2 Trunk 4 2 4 2 4 2 Leg 2 1 2 1 2 1 Posture A 5 4 5 4 5 4 Posture B 9 3 9 2 9 2 Finally 7 3 7 3 7 3
26
pada posture A ataupun posture B memiliki score yang tinggi yakni score 5 untuk posture A dan score 9 untuk posture B. Posture A dipengaruhi oleh gerakan shoulder, arm, and twist. Terdapat perubahan score pada bagian arm and hand yang awalnya memiliki score 3 berubah score menjadi 2. Hal ini dipengaruhi karena saat gerakan awal operator cenderung melewati batas garis tengah tubuh, dimana dalam analisis RULA ini mendapatkan score tambahan yaitu 1, sedangkan setelah dilakukan modifikasi stang, tempat duduk operator dan pijakan gerakan menjadi normal/ tidak melewati garis tengah tubuh sehingga tidak ada tambahan score. Posture B dipengaruhi oleh bagian Neck, Trunk, and Leg. Score Awal Neck yaitu 5 berubah score menjadi 1, untuk score trunk yang awalnya 4 berubah menjadi 2 hal ini dipengaruhi oleh gerakan awal yang hanya menggunakan 1 tangan sehingga membutuhkan trunk (punggung) ynag membungkuk berlebihan untuk menggapai stang kemudi yang sedang berbelok serta tangan yang digunakan telah melewati garis tengah tubuh karena stang kemudi yang seharusnya dipegang oleh tangan kanan, pada gerakan awal operator stang kemudi bagian kanan dipegang oleh tangan kiri. Pada bagian leg score awalnya 2 berubah menjadi 1, hal ini dikarenakan kaki pada gerakan oeprator awal tidak dapat digunakan sebagai tumpuan hal ini terbukti karena salah satu tangan operator harus memegang bagian pinggi tempat duduk agar keseimangan tubuh tetap terjaga, hal ini tentu saja berebeda dengan gerakan operator setelah mengalami perbaikan pada stang kemudi, tempat duduk operator serta pijakan kaki dimana tangan operator tetap berada pada stang kemudi serta kaki operator juga masih berpijak dengan aman sebagai tumpuan tubuh karena pijakan kaki operator telah dibuat lebih panjang bagitu pula dengan tempat duduk operator yang telah dibuat lebih pajang dan lebar.
Rekomendasi Design
Rekomendasi design yang di buat ini merupakan rekomendasi untuk pengoperasian traktor dalam hal transportasi, sedangkan untuk pengoperasian traktor untuk pengolahan lahan di perlukan analisis lebih lanjut, karena akan menghasilkan hasil yang berbeda di karenakan gerakan operator saat mengoperasikan traktor untuk pengolahan tanah memiliki gerakan yang lebih banyak jika dibandingkan dengan operator saat mengoperasikan traktor untuk transportasi. Rekomendasi ini dibuat untuk menghasilkan gerakan yang aman untuk operator lokal di Indonesia berdasarkan ketiga percentil (Percentil 5, 50, dan 95) yaitu perlu ada perubahan pada bagian stang kemudi yang mencakup panjang stang, lebar stang, dan tinggi stang. Selain design baru pada stang kemudi, perlu dibuat juga design baru untuk bagian tempat duduk operator dan pijakan kaki. Design baru ini untuk mendukung gerakan si operator khususnya saat melakukan posisi pengoperasian belok < 45º. Ukuran dari stang kemudi, tempat duduk operator, serta pijakan kaki operator yang baru telah dibuat berdasarkan kesesuaian antropometri dari percentil 5, 50, dan 95 dan simulasi sudut gerak yang aman. Ukuran design yang awal dengan design yang baru dapat dilihat pada Tabel 8, serta untuk gambar perubahan design dapat dilihat pada Gambar 14 dan 15. Perubahan dimensi ini dilakukan untuk menciptakan gerakan yang aman dan nyaman bagi operator saat mengendarai traktor untuk transportasi.
27
Tabel 8 Ukuran design awal dan modifikasi
Keterangan Ukuran Awal Ukuran Modifikasi Panjang Stang 1560.47 mm 1463.9 mm
Lebar Stang 844.19 mm 559.21 mm
Tinggi stang 1070.18 mm 1234.12 mm
Panjang kursi 170 mm 445 mm
Lebar kursi 400 mm 510 mm
Tinggi sanderan kursi 0 mm 125 mm Panjang pijakan kaki 390 mm 1060 mm
Lebar pijakan kaki 290 mm 360 mm
Berdasarkan data pada Tabel 8 perubahan yang terjadi pada bagian stang, tempat duduk, dan pijakan kaki design awal dengan design yang telah diperbaiki mengalami perubahan dimensi yang cukup signifikan. Bagian panjang stang awalnya memiliki dimensi 1560.47 mm berubah menjadi 1463.9 mm (fit percentil 50, acceptable percentil 5 and 95), dengan lebar awal stang 844.19 mm menjadi 559.21 mm (fit percentil 50, acceptable percentil 5 and 95) serta tinggi stang yang awalnya 1070.18 mm menjadi 1234.12 mm (fit percentil 95, acceptable percentil 5 and 50). Perubahan design stang kemudi ini berdasarkan analisis sudut gerak menggunakan Tabel ROM terhadap gerakan yang dilakukan operator saat mengendarai traktor berjalan lurus ataupun belok < 45º. Data antropometri pada masing-masing percentil juga mempengaruhi dalam menentukan sudut gerak yang aman untuk ketiga percentil, dari data sudut gerka yang telah dibuat aman maka data tersebut digunakan sebagai acuan dalam menentukan panjang, lebar, serta tinggi stang kemudi yang baru. Pada bagian tempat duduk operator juga mengalami perubahan untuk mendukung gerakan yang aman bagi operator dalam mengendarai traktor tersebut, acuan yang digunakan dalam membuat dimensi baru pada tempat duduk operator ini yaitu berdasarkan data antropometri masing-masing percentil. Perubahan dimensi tempat duduk operator yang baru yaitu tempat duduk yang awalnya memiliki panjang 170 mm menjadi 445 mm (fit
percentil 50, acceptable percentil 5 and 95) dan lebar tempat duduk awal yaitu 400 mm berubah menjadi 510 mm (fit percentil 95, acceptable percentil 5 and 50) serta terdapat tambahan sandaran tempat duduk operator yang pada design yang baru, sedangkan design awal tidak terdapat sandaran pada tempat duduk operator tersebut. Dimensi dari tinggi sandaran yaitu 125 mm (fit percentil 95, acceptable percentil 5 and 50) dengan lebar sandaran mengikuti ukuran lebar dari design tempat duduk operator yang baru. Selain perubahan dimensi tempat duduk operator, perubahan juga terjadi pada bagian pijakan kaki, hal ini tentu saja dilakukan untuk memberikan rasa aman bagi operator saat mengendari traktor untuk transportasi. Design pada pijakan kaki ini di pengaruhi oleh antropometri tiap percentil (percentil 5, 50, dan 95). Perubahan dimensi pada bagian pijakan kaki operator yaitu panjang awal 390 mm berubah menjadi 1060 mm (fit percentil 95, acceptable percentil 5 and 50) dan lebar pijkan kaki awal 290 mm berubah menjadi 360 mm (fit percentil 95, acceptable percentil 5 and 50).
28
Gambar 14 Desain stang kemudi awal
29
Gambar 16 Desain tempat duduk awal
30
Gambar 18 Desain pijakan kaki awal
31
Gambar 20 Jarak permukaan roda dengan tinggi stang awal
32
SIMPULAN DAN SARAN
SimpulanPenelitian ini telah melakukan analisis untuk mengindentifikasi gerakan operator saat pengoperasian traktor untuk tarnsportasi, analisis ini dilakukan menggunakan tabel ROM dan data antropometri dari ketiga percentil, peneliti telah membuat model simulasi gerakan yang aman dengan menentukan sudut gerak kerja yang aman berdasarkan tabel ROM untuk ketiga percentil. Pembuatan simulasi model gerakan yang aman dapat digunakan untuk mengurangi resiko kerja bagi operator dalam mengoprasikan traktor roda dua untuk transportasi. Simulasi model gerakan yang aman ini digunakan untuk mendesain stang kemudi baru yang optimum untuk transportasi, ukuran stang kemudi yang baru yaitu panjang 1463.9 mm (fit percentil 50, acceptable percentil 5 and 95), lebar 559.21 mm (fit percentil 50, acceptable percentil 5 and 95) dan tinggi stang 1234.12 mm (fit percentil 95, acceptable percentil 5 and 50). Perubahan juga terjadi pada tempat duduk operator dan pijakan kaki operator untuk meningkatkan kenyamanan dan keamanan bagi operator saat mengendarai traktor untuk transportasi. Dimensi perubahan tempat duduk operator yaitu panjang 445 mm (fit
percentil 50, acceptable percentil 5 and 95), lebar 510 mm (fit percentil 95,
acceptable percentil 5 and 50), dan tinggi sandaran 125 mm (fit percentil 95,
acceptable percentil 5 and 50). Sedangkan untuk pijakan kaki yang baru memiliki panjang 1060 mm (fit percentil 95, acceptable percentil 5 and 50) dan lebar 360 mm (fit percentil 95, acceptable percentil 5 and 50).
Saran
Perlu analisis lebih lanjut apabila stang modifikasi ini digunakan untuk membajak lahan apakah tingkat keamanan dan kenyamannya akan sama atau berbeda saat digunakan untuk transportasi, serta perlu adanya analisa terkait penggunaan bahan yang akan digunakan untuk pabrikasi stang tersebut.
DAFTAR PUSTAKA
Bani S. 2013. Studi antropometri pemanenan kelapa sawit dan aplikasinya pada rancang bangun angkong [skripsi]. Bogor (ID): Institut Pertanian Bogor. Bridger RS. 2003. Introduction to Ergonomics. Taylor & Francis. London &
Newyork: 548 hal.
Herodian S, Saulia L, Morgan K. 1999. pedoman praktikum ergonimika. JICA-DGHE/IPB PROJECT/ADAET. Bogor.
Nugrahaning SD. 2013. Studi gerak dan aplikasinya untuk peningkatan efektivitas dan keselamatan kerja pemanenan kelapa sawit secara manual [skripsi]. Bogor(ID): Institut Pertanian Bogor.
McAtamney L.,and EN Corlett. 1993. RULA: a survey method for the investigation of work-related upper limb disorders. Applied Egonomics, 24:91-99.
33
Nasir F. 2001. Simulasi penentuan kerja optimum pada traktor tangan menggunakan program komputer. [tesis]. Bogor (ID): Institut Pertanian Bogor
Nafchi AM, Nafchi HM, demneh IA. 2011. Improving of steering system for walking tractor-trailer combination to increase operator’s comfort and aese of control. agricultural engineering internasional : CIGR Journal. 13(3). Manuscript No. 1598.
Nurmianto E. 2004. Ergonomi, Konsep Dasar dan Aplikasinya. Edisi Kedua. Surabaya: Guna Widya.
Openshaw. 2006. Ergonomic and Design A Reference Guide. Lowa (US) : Allsteel Inc.
Sanders SM. and McCormick EJ. 1982. Human Factors in Engineering and Design. Fifth Edition. New Delhi : McGraw Hill.
Sari TN. 2012. Analisis desain gagang cangkul berdasarkan antropometri petani pria dan beban kerja penggunaanya pada lahan sawah di kecamatan werdung, demak, jawa tengah [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Syuaib MF, Herodian S, Hidayat DA, Fil’aini R, Sari TN, Putranti KA. 2012. Laporan Hasil Kajian Ergonomika untuk Penyempurnaan Sistem dan Produktivitas Kerja Panen-Muat Sawit di kebun PT Astra Agro Lestari. FATETA. IPB.
Syuaib MF. 2003. Ergonomics study on the process of mastering tractor operation [disertasi]. Tokyo(JP); Tokyo University of Agriculture and Technology. Syuaib MF. 2015. Anthropometric study of farm workes on Java Island,
Indonesia, and its implications for the design of farm tools and euipment.
Applied Ergonomics. 51 (2015) : 222-235.
Syuaib MF. 2015. Ergonomic of the manual harvesting task of oil-palm plantation in Indonesia based on antropometric, postures and work motion analyses.
34
35
36
37
Lampiran 3 Data Pengukuran Antropometri satu Operator
No. Antropometric Measures Score
1 Body Weight (kg) 65 2 Stature 163 3 Eye height 155 4 Sholder height 132 5 Elbow height 109 6 Waist height 91 7 Knuckle height 73 8 Fingertrip height 63 9 Arm span 166 10 Elbow span 85
11 Vertical grip reach 202
12 Forward grip reach 67
13 Forward fingertip reach 76
14 Sitting height 82
15 Sitting Eye height 70
16 Sitting shoulder height 54
17 Sitting elbow height 21
18 Knee height 50
19 Buttock-knee length 56
20 Buttock-popliteal length 44
21 Chest (bust) depth 19
22 Shoulder breadth 42
23 Hip breadth 30
24 Upper-arm length 32
25 Foream hand length 45
26 Hand length 19
27 Hand Breadth 8
28 Grip diameter (inside) 4.5
29 Foot Lenght 25
30 Foot breadth 10
38
Lampiran 4 Perhitungan RULA Manual Percentil 5 (Gerakan lurus awal)
Lampiran 5 Perhitungan RULA Manual Percentil 5 (Gerakan lurus perbaikan)
Table A Table B
Upper Arm (Bahu) Neck (Leher)
Fleksi 52° + abduksi 4
Tanpa fleksi dan tanpa putar/belok ke
samping 1
Lower Arm (Siku) Trunk (Punggung)
Fleksi 12° 2 Fleksi 16° 2
Wrist (Pergelangan
Tangan) Legs (Lutut)
Fleksi 28° 3 Saling mempengaruhi 1 Skor Table B 2 Wrist Twist
mid-range 1 Tambahan
Hasil Table A 4 Gerakan berulang (tidak ada) 0 Beban kerja <4.4 lbs 0 Tambahan Total skor pada tabel B 2 Gerakan berulang
(tidak ada) 0 Beban kerja <4.4 lbs 0 Total skor pada tabel A 4
Kesimpulan Table C 3
Table A Table B
Upper Arm (Bahu) Neck (Leher)
Fleksi 43° + abduksi 3
Tanpa fleksi dan tanpa putar/belok ke
samping 1
Lower Arm (Siku) Trunk (Punggung)
Fleksi 69° 2 Fleksi 14° 2
Wrist (Pergelangan Tangan) Legs (Lutut)
Fleksi 0° 1 Saling mempengaruhi 1 Skor Table B 2 Wrist Twist
mid-range 1 Tambahan
Hasil Table A 4 Gerakan berulang (tidak ada)
Beban kerja <4.4 lbs 0 Tambahan Total skor pada tabel B 2 Gerakan berulang
(tidak ada) 0 Beban kerja <4.4 lbs 0 Total skor pada tabel A 4