Lengan Robot untuk Memindahkan Obyek Berbahaya Terkendali secara
Nirkabel
Daniel Santoso1, Indra Gitomarsono1
1 Fakultas Teknik Elektronika dan Komputer Universitas Kristen Satya Wacana, Jl. Diponegoro 52-60 Salatiga 50711, danvicz@yahoo.com
ABSTRAK
Lengan robot telah menjadi alat bantu manusia untuk melakukan tugas kerja yang cukup berbahaya dan tidak mungkin untuk dilakukan manusia karena keterbatasan tenaga dan daya tahan tubuh. Salah satu contoh adalah penggunaan lengan robot pada ITER (International Thermonuclear Experimental Reactor) untuk memindahkan substansi-substansi nuklir di dalam suatu laboratorium eksperimen. Metode pengontrolan lengan robot ini menggunakan joystick yang terhubung dengan kabel. Kondisi ini kurang ideal karena joystick kurang akurat dan intuitif serta kabel tidak memungkinkan isolasi yang sempurna. Kinerja lengan robot di fasilitas tersebut dapat ditingkatkan dengan menggantikan joystick tersebut dengan sebuah pengontrol yang lebih intuitif, namun tetap akurat serta melengkapinya dengan transceiver radio frequency (RF). Pada penelitian ini dirancang dan direalisasikan sebuah sistem lengan robot berbasis mikrokontroler dua DOF dengan end-effector sebuah penjepit. Sebagai penggerak digunakan motor DC servo. Lengan robot dapat dikendalikan secara nirkabel oleh pengguna menggunakan modul kontrol nirkabel yang dilengkapi sensor akselerometer dan kompas digital untuk menangkap gerakan tangan. Berdasarkan hasil pengujian terhadap purwarupa, didapat ralat pergerakan horizontal sebesar 5% sedangkan ralat pergerakan vertikal sebesar 7% untuk beban maksimal 0,5 kg. Jarak komunikasi nirkabel maksimal yang dapat dilakukan sejauh 10 meter.
Kata kunci: lengan robot, mikrokontroler, akselerometer, kompas digital, nirkabel
1. Pendahuluan
Penggunaan robot di berbagai bidang semakin meningkat dari waktu ke waktu. Robot mulai mengambil peran signifikan untuk menangani berbagai tugas yang biasanya ditangani manusia. Tugas – tugas tersebut meliputi tugas yang tidak bisa ditangani manusia seperti di bidang nuklir, kimia, perjalanan ke luar angkasa dan tugas-tugas lain yang di lakukan di lingkungan yang berbahaya, maupun tugas-tugas yang dapat dilakukan manusia seperti pengelasan, pengangkutan barang, dan tugas-tugas lainnya. Hal ini terjadi karena robot memiliki karakteristik kerja yang tidak dimiliki manusia yaitu dapat menghasilkan luaran yang konsisten ketika mengerjakan suatu pekerjaan melelahkan yang berulang dalam waktu lama, dapat bekerja di lingkungan yang berbahaya, dan memiliki ketelitian tinggi. Terlebih lagi robot tidak memerlukan penerangan, udara segar, istirahat, gaji, ataupun promosi jabatan.
Keuntungan penggunaan robot tersebut salah satunya dimanfaatkan oleh International Thermonuclear Experimental Reactor (ITER). Di fasilitas ini, lengan robot digunakan untuk memindahkan substansi – substansi nuklir di salah satu laboratoriumnya, seperti yang terlihat pada Gambar 1.
Gambar 1. Lengan robot pada salah satu laboratorium ITER
aplikasi pemindahan obyek berbahaya sebenarnya kondisi ini kurang ideal. Pertama, metode pengontrolan menggunakan joystick kurang akurat dan intuitif untuk menerjemahkan pergerakan tangan pengguna menjadi pergerakan lengan robot. Ke-dua, penggunaan kabel untuk menghubungkan joystick dengan pengontrol lengan robot membuat ruangan tempat obyek berbahaya tidak dapat terisolasi secara sempurna. Kinerja lengan robot di fasilitas tersebut dapat ditingkatkan dengan menggantikan joystick tersebut dengan sebuah pengontrol yang lebih intuitif, namun tetap akurat serta melengkapinya dengan transceiver radio frequency
(RF) untuk memungkinkan komunikasi nirkabel dengan pengontrol lengan robot. Jadi, tujuan penelitian ini adalah merancang dan merealisasikan purwarupa sistem pengontrolan lengan robot untuk pemindahan obyek berbahaya dengan pengontrol nirkabel yang intuitif.
Berdasarkan standar industri dalam pengoperasian lengan robot, kriteria penting yang diperlukan adalah ketepatan dan keajegan. Ketepatan adalah kemampuan untuk bergerak dan berpindah secara tepat sesuai dengan kehendak pengguna sedangkan keajegan adalah kemampuan untuk melakukan suatu pekerjaan yang sama secara berulang – ulang dengan hasil yang selalu sama. Visualisasi kedua kriteria tersebut dapat dilihat pada Gambar 2.
Gambar 2. Empat kemungkinan ekstrim kriteria kinerja system lengan robot
Sistem lengan robot dengan ketepatan dan keajegan rendah diwakili oleh visualisasi pada Gambar 2 bagian kiri atas, sedangkan sistem lengan robot dengan ketepatan dan keajegan tinggi diwakili oleh visualisasi bagian kanan bawah. Kriteria kinerja yang terakhir disebut inilah yang dikehendaki.
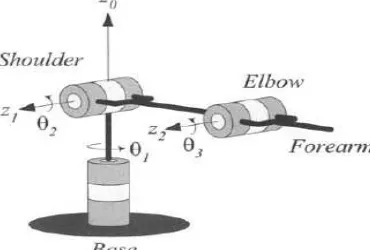
Suatu manipulator robotika secara kinematik terdiri dari sejumlah lengan (link) yang terhubung oleh sejumlah persendian (joint) untuk membentuk sebuah rangkaian kinematik. Meskipun demikian, robot, sebagai sebuah sistem terdiri dari manipulator, wrist, end-effector, aktuator, sensor, pengontrol, prosesor, dan perangkat lunak. Sebuah persendian menyediakan satu derajat kebebasan (degree of freedom - DOF). Oleh karena itu jumlah persendian dalam suatu manipulator juga mewakili jumlah DOF yang dimiliki oleh manipulator tersebut. Umumnya suatu manipulator memiliki paling sedikit enam DOF, tiga untuk posisi dan tiga untuk orientasi. Gambar 3 menunjukkan menunjukkan skema konfigurasi manipulator jenis 3R.
Konfigurasi manipulator 3R ini sesuai untuk keperluan robot industri. Hampir 25% robot industri, PUMA misalnya, dibuat berdasarkan konfigurasi ini.
Suatu organisasi robotika di Jepang bernama Japanese Industrial Robot Association mengklasifikasikan robot menjadi 6 kelas berdasarkan otonomi pergerakannya. Salah satunya adalah kelas 1, yaitu manual handling devices, artinya devais dengan banyak DOF yang digerakkan oleh operator. Selain itu robot juga dapat diklasifikasikan berdasarkan kriteria lain seperti geometri, jangkauan kerja, penggerak, kontrol, dan aplikasinya. Dari sisi penggerak, robot dapat digerakkan secara elektrik, hidrolik, maupun pneumatik. Seperti umumnya sistem, kontrol robot juga dapat diklasifikasikan menjadi kontrol simpal tertutup dan kontrol simpal terbuka.
Masalah kinematik selalu menjadi kriteria perancangan utama dalam manipulator – manipulator keperluan industri. Kinematika adalah cabang ilmu pengetahuan yang menganalisa gerakan manipulator tanpa memperhatikan gaya yang menyebabkan gerakan tersebut. Forward kinematics adalah kasus ketika data kinematikal berupa koordinat persendian diketahui dan digunakan untuk menentukan data koordinat basis. Inverse kinematics adalah kasus ketika data kinematikal berupa koordinat end-effector diketahui dan digunakan untuk menentukan koordinat persendian. Inverse kinematics merupakan kasus kinematik yang sangat tidak linear dan biasanya jauh lebih sulit daripada kasus forward kinematics.
2. Pembahasan
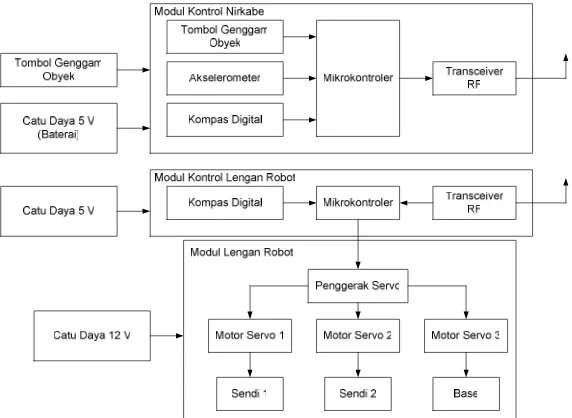
Sistem yang dirancang menggunakan konfigurasi manipulator 3R sebagai basis perancangan lengan robot dengan sebuah penjepit (gripper) sebagai end-effector. Lengan robot yang dirancang mempunyai dua buah persendian sehingga mempunyai 2 DOF. Sebagai penggerak digunakan tiga buah motor DC servo. Dua motor digunakan pada persendian, satu motor digunakan untuk penjepit yang dapat membuka dan menutup. Sistem dirancang berbasis mikrokontroler. Sistem terdiri dari tiga bagian utama yaitu modul kontrol nirkabel, modul kontrol lengan robot, dan modul lengan robot dua persendian, seperti yang terlihat pada Gambar 4.
Gambar 4. Diagram kotak sistem secara keseluruhan
terdiri dari modul transceiver gelombang radio 2,4 GHz Laipac TRF-2.4G, mikrokontroler AVR ATMega 32, dan kompas digital HM55B. Persendian pertama dan ke-dua menggunakan motor DC servo dengan torsi 28.8 kg.cm sedangkan penjepit menggunakan motor DC servo dengan torsi 4 kg.cm.
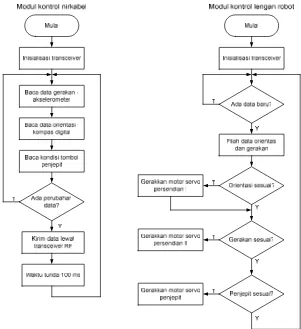
Gerakan tangan pengguna akan ditangkap pada modul kontrol nirkabel untuk diterjemahkan sebagai gerakan lengan robot. Di dalam modul kontrol nirkabel, sensor akselerometer akan memberikan data nilai masing-masing percepatan arah gerak tangan pengguna pada arah 3 dimensi ruang sedangkan sensor kompas digital akan memberikan data orientasi gerak tangan pengguna terhadap arah mata angin. Kedua macam data masukan tersebut akan diolah di dalam mikrokontroller dengan periode penyampelan tertentu agar pergerakan tangan dapat dideteksi secara kontinu. Terdapat juga tombol untuk mengatur gerakan penjepit. Setelah diolah oleh mikrokontroler maka data-data tersebut dikirimkan secara nirkabel melalui transceiver RF.
Data yang dikirimkan oleh transceiver RF pada modul kontrol nirkabel akan diterima oleh transceiver RF dan diolah pada mikrokontroller pada modul kontrol lengan robot. Untuk membuat orientasi lengan robot selaras dengan gerakan tangan pengguna, digunakan sensor kompas digital lain untuk membandingkan orientasi lengan robot dengan arah tangan pengguna. Proses pembandingan data yang mewakili orientasi ini berlangsung di dalam mikrokontroller. Setelah itu, mikrokontroler akan mengeluarkan pulsa – pulsa PWM (Pulse Width Modulation) yang merepresentasikan orientasi dan gerakan tangan pengguna untuk menggerakkan motor DC servo masing-masing persendian pada lengan robot.
Diagram alir perangkat lunak mikrokontroler pada modul kontrol nirkabel dan modul kontrol lengan robot dapat dilihat pada Gambar 5.
Purwarupa modul kontrol nirkabel dan kontrol lengan robot telah berhasil direalisasikan dan diuji, seperti yang terlihat pada Gambar 6.
Gambar 6. Purwarupa modul kontrol nirkabel dan modul lengan robot
Dapat dilihat bahwa purwarupa modul nirkabel berdimensi kompak dan cukup ergonomis untuk digenggam tangan. Bagian modul lengan robot terintegrasi dengan modul lengan robot dua sendi yang rangkanya terbuat dari alumunium.
Pengujian pergerakan horizontal dan vertikal telah dilakukan terhadap purwarupa sistem ini untuk mengetahui ketelitian, keajegan, dan kepekaan pergerakan lengan robot terhadap masukan berupa pergerakan tangan pengguna yang ditangkap oleh modul kontrol nirkabel. Untuk pergerakan horizontal, lengan robot ini maksimal mampu bergerak sejauh 180° dari titik nol – nya. Ralat pergerakan horizontal sebesar 5% dan pergerakan tangan terkecil yang dapat ditanggapi sebesar 5°. Untuk pergerakan vertikal, lengan robot ini mampu bergerak sejauh 15 cm dari titik nol – nya. Ralat pergerakan vertikal sebesar 7%. Nilai – nilai tersebut untuk berlaku untuk beban yang dipegang oleh penjepit maksimal 0,5 kg. Jarak komunikasi nirkabel valid yang dapat dilakukan maksimal sejauh 10 meter tanpa halangan. Metode pengecekan validitas komunikasi menggunakan fasilitas CRC yang terdapat di dalam transceiver RF.
3. Kesimpulan
Berdasarkan hasil perancangan dan pengujian pada sistem dapat disimpulkan bahwa secara keseluruhan sistem pengontrolan lengan robot secara nirkabel dapat bekerja dengan baik. Ralat pergerakan horizontal sebesar 5% sedangkan ralat pergerakan vertikal sebesar 7% untuk beban maksimal 0,5 kg. Penambahan beban akan memperlambat gerak lengan robot dan memperbesar ralat. Jarak komunikasi nirkabel maksimal yang dapat dilakukan sejauh 10 meter.
Untuk pengembangan selanjutnya penulis menyarankan untuk merancang ulang konstruksi lengan robot beserta motor DC servo yang digunakan agar sesuai dengan kaidah – kaidah fisika untuk menghasilkan gerakan yang lebih tepat dan efisien. Mekanisme umpan balik juga perlu ditambahkan pada pergerakan vertikal dan komunikasi nirkabel,
Daftar Pustaka
[1] Nof SY, 1985, Handbook of Industrial Robotics, John Wiley and Sons Inc., New York [2] Jazar RN, 2007, Theory of Applied Robotics : Kinematics, Dynamics, and Control,
Springer Science+Bussiness Media LLC, New York
[3] Barret SF and Pack DJ, 2008, Atmel AVR Microcontroller Primer : Programming and Interfacing, Morgan and Claypool, California