54
ANALISA DAN PENGUJIAN
4.1 Tujuan Pengujian
Pengujian yang akan dilakukan untuk mengetahui apakah sistem sudah berjalan sesuai dengan perencanaan yang telah dibuat. Pengujian dilakukan pada beberapa bagian secara terpisah, kemudian dilakukan dalam sistem yang telah terintegrasi. Setelah melakukan perencanaan dan perancangan, selanjutnya perlu dilakukan pengujian dan pengukuran terhadap peralatan. Dalam pengujian dan analisa sistem, terlebih dahulu harus menjalankan rangkaian secara benar dalam pemasangan dan integrasi hardware maupun software.
Tujuan pengujian berguna untuk menghindari kesalahan-kesalahan yang terjadi, langkah ini untuk mengetahui kondisi peralatan yang direncanakan sudah dapat berjalan dengan baik dan sesuai dengan yang dikehendaki atau tidak. Pengujian meliputi :
1. Pengujian rangkaian power supply.
2. Pengujian rangkaian jumper.
3. Pengujian servo.
4. Pengujian sensor ultrasonik.
5. Pengujian sistem keseluruhan.
4.2 Pengujian Power Supply
Pengujian pada power supply dilakukan pada rangkaian UBEC 3A dan rangkaian regulator LM7805, pengujian di titik beratkan pada pengujian tegangan output pada masing-masing rangkaian untuk memastikan tegangan output tidak mengalami over voltage atau down voltage.
Sehingga dapat menghindari resiko kerusakan pada rangkaian , servo dan sensor .
Tabel 4.1 Pengujian Rangkaian UBEC
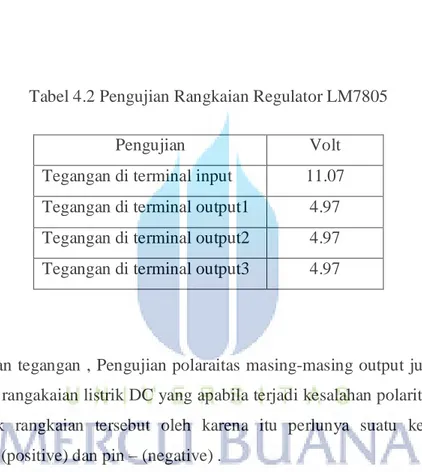
Tabel 4.2 Pengujian Rangkaian Regulator LM7805
Pengujian Volt
Tegangan di terminal input 11.07 Tegangan di terminal output1 4.97 Tegangan di terminal output2 4.97 Tegangan di terminal output3 4.97
Selain pengujian tegangan , Pengujian polaraitas masing-masing output juga penting karena kita menggunakan rangakaian listrik DC yang apabila terjadi kesalahan polaritas dapat berakibat fatal dan merusak rangkaian tersebut oleh karena itu perlunya suatu keseragaman untuk menandakan pin + (positive) dan pin – (negative) .
4.3 Pengujian Rangkaian Jumper
Pengujian dilakukan pada rangkaian jumper servo kanan , rangkaian jumper servo kiri dan rangkaian jumper sensor . pengujian di titik beratkan pada pengujian tegangan pada masing- masing input dan ouput serta pengujian hubung singkat yang mungkin terjadi.
Pengujian Volt
Tegangan output (posisi saklar 5v) 5.27 Tegangan output (posisi saklar 6v) 6.00
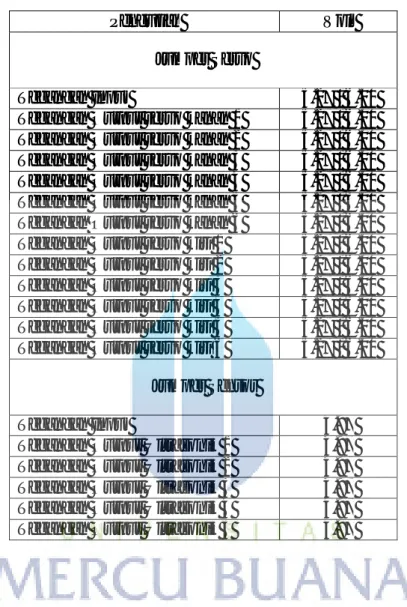
Tabel 4.3 Pengujian Rangkaian Jumper
Pengujian Volt
Jumper Servo
Tegangan Input 5.27 / 6.00
Tegangan Output servo kanan 1 5.27 / 6.00 Tegangan Output servo kanan 2 5.27 / 6.00 Tegangan Output servo kanan 3 5.27 / 6.00 Tegangan Output servo kanan 4 5.27 / 6.00 Tegangan Output servo kanan 5 5.27 / 6.00 Tegangan Output servo kanan 6 5.27 / 6.00 Tegangan Output servo kiri 1 5.27 / 6.00 Tegangan Output servo kiri 2 5.27 / 6.00 Tegangan Output servo kiri 3 5.27 / 6.00 Tegangan Output servo kiri 4 5.27 / 6.00 Tegangan Output servo kiri 5 5.27 / 6.00 Tegangan Output servo kiri 6 5.27 / 6.00
Jumper Sensor
Tegangan Input 4.97
Tegangan Output Ultrasonik 1 4.97 Tegangan Output Ultrasonik 2 4.97 Tegangan Output Ultrasonik 3 4.97 Tegangan Output Ultrasonik 4 4.97 Tegangan Output Ultrasonik 5 4.97
Pengujian hubung singkat menggunakan multimeter dengan mode loudspeaker yang akan berbunyi apa bila 2 titik pengujian saling terhubung / terkoneksi.
4.4 Pengujian Servo
Pengujian servo dibagi menjadi 2 tahap , yaitu :
Pengujian rusak atau tidak nya servo
Pengujian pose robot
Pengujian untuk mengetahui rusak atau tidaknya servo menggunakan program sweep yang sudah ada di software Arduino pada tab Example.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object }
void loop() {
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees { // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position }
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees {
myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position }
}
Pengujian pose robot dilakukan dengan memberi program siap / berdiri pada robot dan menganalisa/memperhatikan perbedaan sudut pada tiap kaki dan lengan robot lalu dilakukan kalibrasi. Pengujian ini bertujuan untuk dapat mengkalibrasi sudut servo dengan pengaturan baik menggunakan program ataupun secara mekanik sehingga dapat menghasilkan pergerakan robot yang sesuai dengan yang diharapkan.
4.5 Pengujian Sensor Ultrasonik
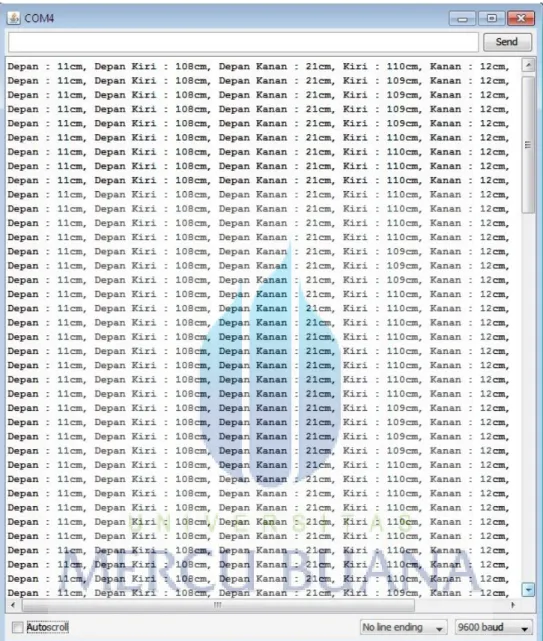
Pengujian sensor ultrasonik menggunakan fasilitas serial monitor pada software Arduino yang membuat kita dapat memantau data-data ultrasonik pada tiap-tiap sensor secara real-time.
int ultraSoundSignalPins[ ] = {49,48,47,46,45};
// Front Left,Front, Front Right, Rear Ultrasound signal pins
char *pingString[ ] = {"Depan : ","Depan Kiri : ", "Depan Kanan : ", "Kiri : ", "Kanan : "};
// just something to print to indicate direction
void setup() {
Serial.begin(9600);
}
void loop() {
unsigned long ultrasoundValue;
for(int i=0; i < 5; i++) {
ultrasoundValue = ping(i);
Serial.print(pingString[i]);
Serial.print(ultrasoundValue);
Serial.print("cm, ");
delay(50);
}
Serial.println();
delay(50);
}
//Ping function
unsigned long ping(int i) {
unsigned long echo;
pinMode(ultraSoundSignalPins[i], OUTPUT); // Switch signalpin to output digitalWrite(ultraSoundSignalPins[i], LOW); // Send low pulse
delayMicroseconds(2); // Wait for 2 microseconds digitalWrite(ultraSoundSignalPins[i], HIGH); // Send high pulse delayMicroseconds(5); // Wait for 5 microseconds digitalWrite(ultraSoundSignalPins[i], LOW); // Holdoff
pinMode(ultraSoundSignalPins[i], INPUT); // Switch signalpin to input digitalWrite(ultraSoundSignalPins[i], HIGH); // Turn on pullup resistor echo = pulseIn(ultraSoundSignalPins[i], HIGH); //Listen for echo
return (echo / 58.138); //convert to CM }
Gambar 4.1 Serial monitor Arduino
4.6 Pengujian Sistem secara keseluruhan
Posisi awal robot berada di area start . Saat baru dinyalakan robot menjalankan pose siap/diam selama 3 detik lalu robot menjalankan fungsi ultrasonik untuk mendapatkan data-data jarak tembok labirin kemudian robot menjalankan fungsi gerakan maju dan kondisi keempat buah lampu LED dalam keadaan LOW / Mati .
Robot akan terus menjalankan fungsi gerakan maju sampai ultrasonik 1, 2, dan 3 membaca kondisi jarak tertentu terhadap tembok . Apabila ultrasonik 2 dan 3 membaca kondisi jerak tembok < = 11 maka menandakan posisi robot sedang dalam keadaan miring ke kiri atau miring ke kanan sehingga robot akan menjalakankan fungsi muter kiri / muter kanan sebanyak 1 kali , jika kondisi tersebut sudah tidak terpenuhi maka robot akam menjalankan fungsi gerakan maju yang merupakan fungsi gerakan robot secara default .
Gambar 4.2 Posisi Start
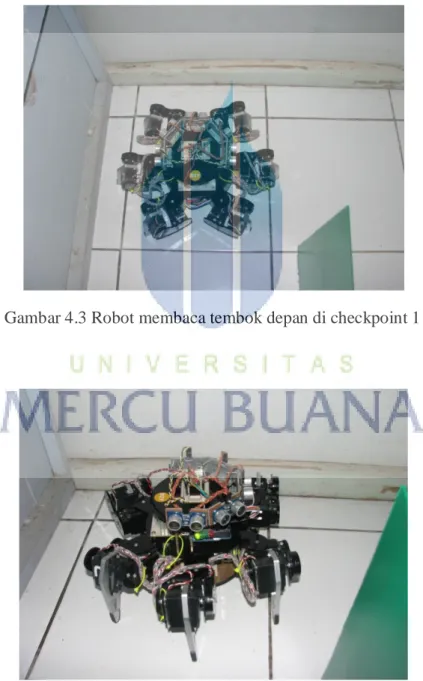
Saat robot berada di belokan pertama (checkpoint 1) akan membaca halangan / tembok didepannya dan menjalankan fungsi ultrasonik untuk mendapatkan data dari ultrasonik 3 (kiri) dan ultrasonik 4 (kanan) , lalu mejalankan fungsi berputar sebanyak 3 kali ke arah yang jaraknya lebih jauh , sehingga robot akan berputar sebanyak 3 kali ke kanan dan menyalakan lampu LED pertama sebagai tanda robot sudah berada di checkpoint 1 lalu menjalankan kembali gerakan default robot .
Gambar 4.3 Robot membaca tembok depan di checkpoint 1
Gambar 4.4 Robot checkpoint 1
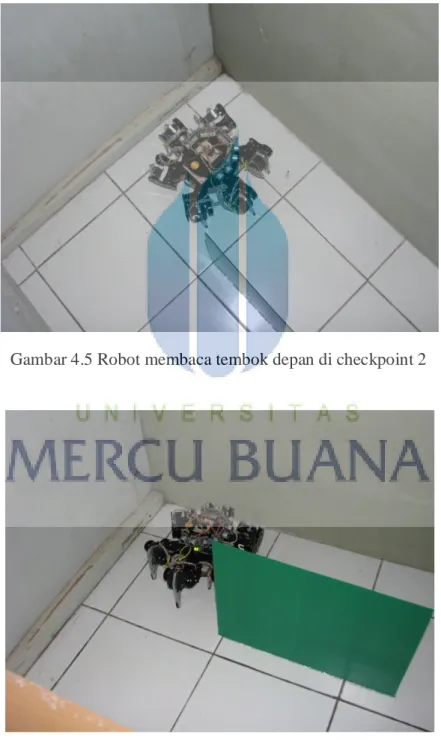
Saat robot kembali membaca tembok di depannya yang berada di posisi checkpoint 2 maka robot akan berputar 3 kali ke kanan karena ultrasonik 4 membaca jarak lebih jauh dari pada ultrasonik 3 , setelah fungsi berputar 3 kali ke kanan di jalankan maka lampu LED kedua akan menyala untuk menandakan robot sudah berada di checkpoint 2 lalu kembali menjalankan fungsi gerakan default robot .
Gambar 4.5 Robot membaca tembok depan di checkpoint 2
Gambar 4.6 Robot checkpoint 2
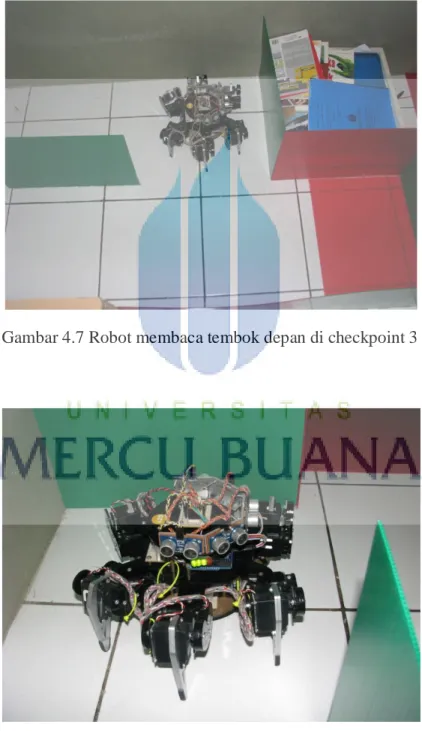
Saat robot kembali membaca tembok di depannya yang berada di posisi checkpoint 3 maka robot akan berputar 3 kali ke kanan karena ultrasonik 4 membaca jarak lebih jauh dari pada ultrasonik 3 , setelah fungsi berputar 3 kali ke kanan di jalankan maka lampu LED ketiga akan menyala untuk menandakan robot sudah berada di checkpoint 3 lalu kembali menjalankan fungsi gerakan default robot .
Gambar 4.7 Robot membaca tembok depan di checkpoint 3
Gambar 4.8 Robot checkpoint 3
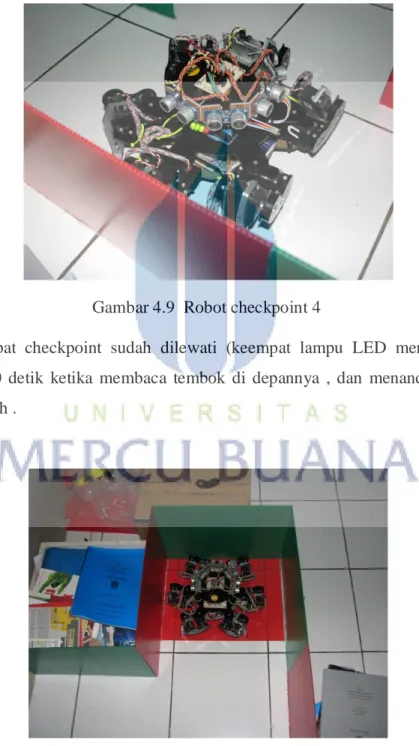
Saat robot kembali membaca tembok di depannya yang berada di posisi checkpoint 4 maka robot akan membaca pin LED pertama , kedua dan ketiga , jika ketiga pin tersebut dalam keadaan HIGH / menyala maka robot akan berputar 3 kali ke arah kiri lalu menyalakan lampu LED ke empat sebagai menanda robot sudah berada di checkpoint 4 dan kembali menjalankan fungsi default robot .
Gambar 4.9 Robot checkpoint 4
Saat keempat checkpoint sudah dilewati (keempat lampu LED menyala) robot akan berhenti selama 10 detik ketika membaca tembok di depannya , dan menandakan robot sudah berada di area finish .
Gambar 4.10 Robot finish
4.7 Analisa
Teknik Navigasi yang hanya menggunakan sensor utrasonik dan dibantu dengan
rangkaian LED sebagai indikator checkpoint dapat berjalan dengan lancer apabila robot dapat bergerak maju dengan baik (jalan lurus).
Power Supply robot sudah baik karena tidak ada energi yang terbuang (UBEC 3A dan LM7805 tidak overheat) dan baterai bekerja dengan baik dan tahan lama.
Bahan acrylic cukup kuat untuk menopang beban robot.
Pemotongan mekanik dengan menggunakan mesin Laser tidak 100% menghilangkan masalah mekanik karena masih perlu dilakukannya kalibrasi terhadap posisi sudut servo , tetapi pemotongan dengan mesin laser jauh lebih baik dari pemotongan secara manual.
Sensor ultrasonik terkadang salah membaca jarak tembok yang dapat disebabkan oleh pantulan suara yang tidak diharapkan atau bagian dari robot yang menghalangi sensor ultrasonik.
Kalibrasi ultrasonik diperlukan untuk menghasilkan gerakan robot yang baik.
Mekanik robot hexapod dengan 2 sudut kebebasan (2DOF) membuat robot memerlukan ruang yang cukup lebar untuk dapat bergerak dengan baik.
Mekanik robot hexapod 2DOF membuat robot mengalami gesekan pada ujung kaki untuk bergerak sehingga lambat laun ujung kaki robot akan terkikis.
Metode navigasi dengan checkpoint dapat mempermudah dalam pemprograman untuk menyusuri labirin pada robot yang hanya memiliki satu / sedikit sensor.