54
HASIL PENELITIAN DAN PEMBAHASAN
4.1 Hasil Penelitian
Eksperimen dilakukan untuk memperoleh hasil penelitian yang dilakukan dalam skripsi ini. Eksperimen yang dilakukan mengenai proses rekonstruksi citra 2D menjadi citra 3D dimana dengan implemantasi ini diperoleh data-data yang spesifik.
Pada saat melakukan eksperimen, diperlukan 2 citra yang berkorespondensi, yakni gambar yang diambil oleh kamera kiri dan kamera kanan yang diperoleh dengan memfoto objek yang akan digunakan sebagai objek eksperimen. Setelah 2 citra stereo dimasukkan kemudian akan diproses dengan mencari titik korespondensi. Berikut ini adalah menentukan satu titik pada citra kiri dan titik tersebut merupakan titik yang berkorespondensi pada citra kanan.
4.1.1 Eksperimen dengan Objek Bola
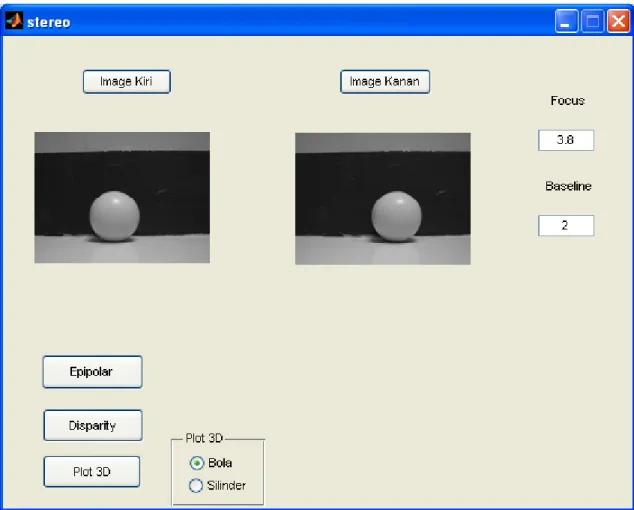
Pada eksperimen ini, kami menggunakan objek bola yang diletakkan di atas lantai dan bersandar pada dinding. Pengambilan citra dilakukan sebanyak 2 kali dengan menggunakan sebuah kamera yang mempunyai fokus 3,8. Citra pertama diambil sebagai citra kiri, lalu kamera digeser sebanyak 2 cm ke kanan dari tempat sebelumnya, untuk memperoleh citra kanan.
Gambar 4.1 Citra kiri dan Cita kanan
Pada saat memasukan citra stereo ke dalam program, secara otomatis program akan langsung melakukang grayscaling, untuk mempermudah melakukan proses selanjutnya dalam warna grayscale.
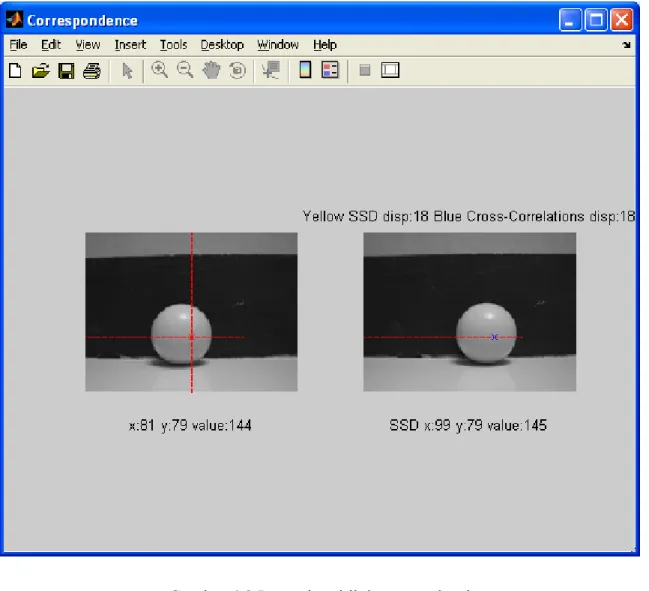
Gambar 4.2 Pencarian titik korespondensi
Dari gambar tersebut diketahui nilai dari gambar kiri yang memiliki nilai x = 81 dan nilai y = 79 dimana nilai tersebut berkorespondensi pada gambar kanan yang memiliki nilai x = 99 dan nilai y = 79. Dari nilai tersebut diketahui bahwa gambar kiri dan gambar kanan dalam posisi sejajar dimana posisi x mengalami pergeseran sedangkan posisi y tetap dalam kondisi sejajar.
Dari hasil korespondensi tersebut didapatkan nilai disparity pada posisi tersebut yang dihitung menggunakan SSD (sum of squared difference) dengan
tanda x yang nilai disparity = 18 dan jika dihitung dengan Cross-Correlations dengan tanda x yang nilai disparity = 18.
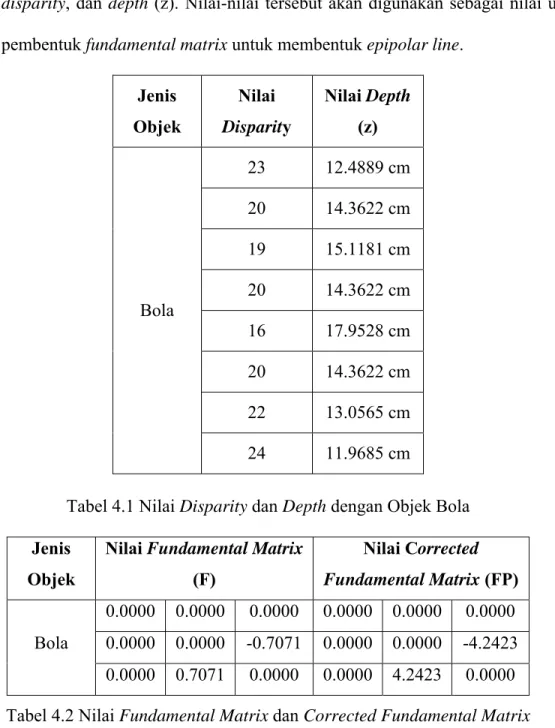
Setelah menentukan 8 titik yang berkorespondensi diperoleh nilai disparity, dan depth (z). Nilai-nilai tersebut akan digunakan sebagai nilai untuk pembentuk fundamental matrix untuk membentuk epipolar line.
Jenis Objek Nilai Disparity Nilai Depth (z) Bola 23 12.4889 cm 20 14.3622 cm 19 15.1181 cm 20 14.3622 cm 16 17.9528 cm 20 14.3622 cm 22 13.0565 cm 24 11.9685 cm
Tabel 4.1 Nilai Disparity dan Depth dengan Objek Bola Jenis
Objek
Nilai Fundamental Matrix (F) Nilai Corrected Fundamental Matrix (FP) Bola 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.7071 0.0000 0.0000 -4.2423 0.0000 0.7071 0.0000 0.0000 4.2423 0.0000 Tabel 4.2 Nilai Fundamental Matrix dan Corrected Fundamental Matrix
Matrix F merupakan fundamental matrix, sedangkan Fp merupakan corrected fundamental matrix. Dimana Fp sebagai matrix yang mengkoreksi
matrix F, dan jika hasil antara F dan Fp berdekatan atau sama, maka data tersebut valid. Manfaat dari pembentukan epipolar line sebagai cara untuk memudanapahkan memperoleh disparity map.
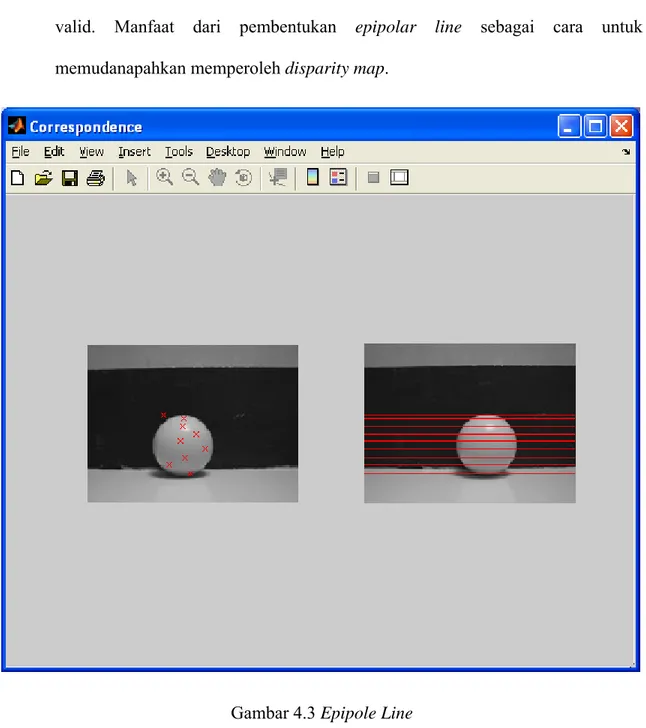
Gambar 4.3 Epipole Line
Terlihat epipole line yang terbentuk lurus dan sejajar dengan titik-titik pada citra kiri, hal ini berarti tidak ada rektifikasi pada pengambilan citra dengan kamera. Epipole line akan digunakan untuk memperoleh disparity map sehingga dapat diketahui kedalamaan suatu objek.
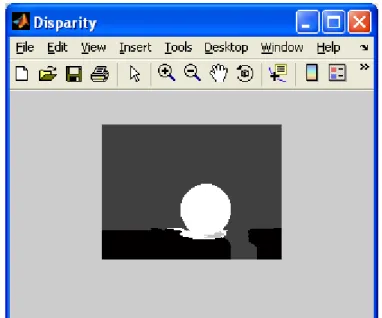
Gambar 4.4 Disparity Map
Pada Gambar 4.4 terlihat disparity map dari kedua objek bola tersebut dimana, hasil disparity yang diperoleh tidak begitu jelas karena adanya pemantulan cahaya pada lantai dan dinding, maka dari itu perlu diperjelas dengan melakukan grayscale pada kedua citra agar hasil yang diperoleh lebih baik.
Dari hasil disparity tersebut maka diketahui kedalaman suatu objek, yang mana pada gambar telihat warna putih pada objek bola yang berarti bola tersebut dekat dengan lensa kamera dibandingkan dinding yang berwarna abu-abu dan lantai yang berwarna hitam.
Untuk menggambakan plot 3D dengan objek bola, kami melakukan interpolasi objek yang tampak, dimana dengan menggunakan rumus interpolasi bola:
x = r cos 2 π (u)
z = r sin 2 π (u) sin 2 π (v) keterangan :
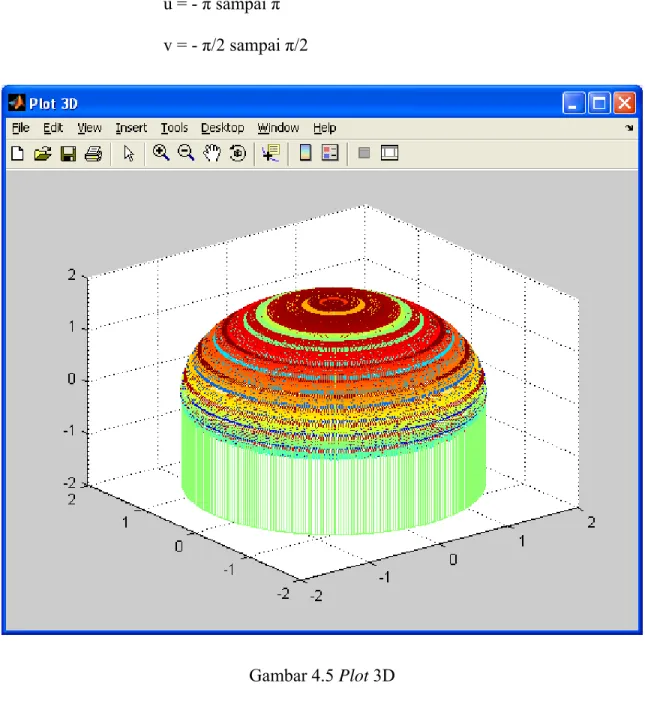
u = - π sampai π v = - π/2 sampai π/2
Gambar 4.5 Plot 3D
Gambar 4.5 merupakan hasil plot 3D dari objek bola, di mana terdapat informasi nilai horisontal (x), vertikal (y), dan kedalaman objek (z). Hasil plot 3D tersebut masih tidak terlalu menyerupai bentuk objek aslinya yaitu bola. Terlihat hanya bagian permukaan objek yang tertangkap kamera, yang dapat
digambarkan model 3D sedangkan bagian yang tidak tertangkap kamera tidak dapat digambarkan model 3D-nya. Ini disebabkan oleh masalah pada saat pencarian titik korespodensi yaitu oclusions, dan projective distortion.
4.1.2 Eksperimen dengan Objek Silinder
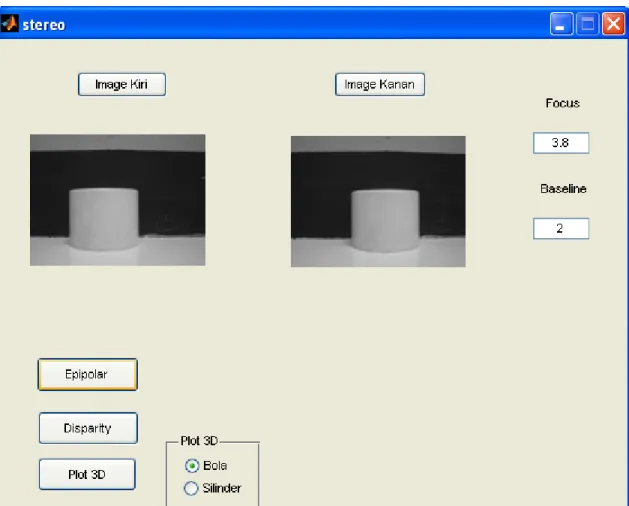
Pada eksperimen ini, kami menggunakan objek silinder yang diletakkan di atas lantai dan bersandar pada dinding. Pengambilan gambar dilakukan sebanyak 2 kali dengan menggunakan sebuah kamera yang mempunyai fokus 3,8. Gambar pertama diambil sebagai gambar kiri, lalu kamera digeser sebanyak 2 cm ke kanan dari tempat sebelumnya, untuk memperoleh gambar kanan.
Gambar 4.7 Penentuan titik korespondensi
Dari gambar tersebut diketahui nilai dari gambar kiri yang memiliki nilai x = 50 dan nilai y = 81 dimana nilai tersebut berkorespondensi pada gambar kanan yang memiliki nilai x = 72 dan nilai y = 81. Dari nilai tersebut diketahui bahwa gambar kiri dan gambar kanan dalam posisi sejajar dimana posisi x mengalami pergeseran sedangkan posisi y tetap dalam kondisi sejajar.
Dari hasil korespondensi tersebut didapatkan nilai disparity pada posisi tersebut yang dihitung menggunakan SSD (sum of squared difference) dengan
tanda x yang nilai disparity = 22 dan jika dihitung dengan Cross-Correlations dengan tanda x yang nilai disparity = 24.
Dalam kasus ini antara nilai SSD dan Cross-Correlations memiliki nilai yang berbeda karena rumus disparity SSD dan Cross-Correlations berbeda dan juga ketepatan ukuran pada saat pengambilan citra sangat mempengaruhi nilai disparity yang ditemukan dimana dalam kasus ini, berarti titik korespondensi tersebut tidak begitu tepat akan tetapi disparity yang akan digunakan menggunakan SSD karena dinilai lebih akurat dan tidak akan terjadi bias jika ada daerah atau wilayah yang sangat kecil dan sangat besar nilai intensitasnya.
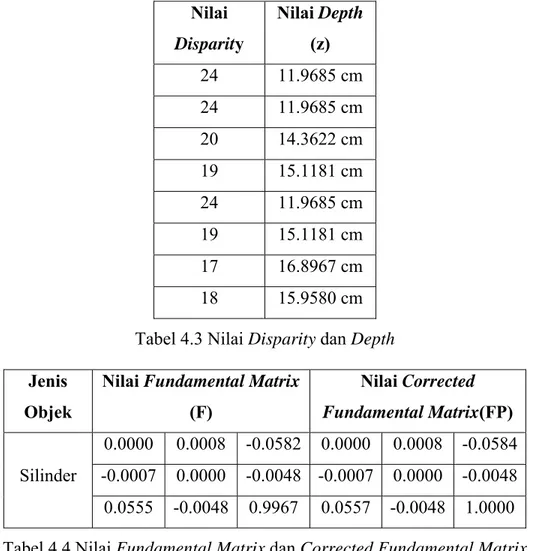
Nilai Disparity Nilai Depth (z) 24 11.9685 cm 24 11.9685 cm 20 14.3622 cm 19 15.1181 cm 24 11.9685 cm 19 15.1181 cm 17 16.8967 cm 18 15.9580 cm
Tabel 4.3 Nilai Disparity dan Depth Jenis
Objek
Nilai Fundamental Matrix (F) Nilai Corrected Fundamental Matrix(FP) Silinder 0.0000 0.0008 -0.0582 0.0000 0.0008 -0.0584 -0.0007 0.0000 -0.0048 -0.0007 0.0000 -0.0048 0.0555 -0.0048 0.9967 0.0557 -0.0048 1.0000 Tabel 4.4 Nilai Fundamental Matrix dan Corrected Fundamental Matrix
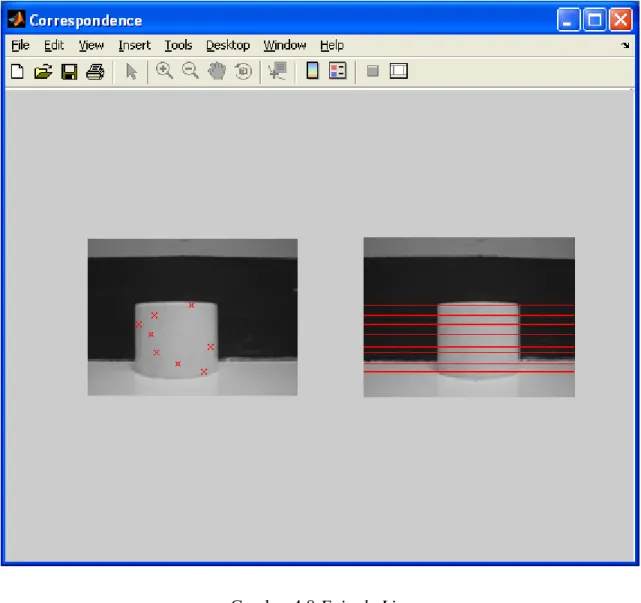
Gambar 4.8 Epipole Line
Ini adalah hasil dari epipole line yang terbentuk garis-garis lurus yang sejajar, hal menunjukan bahwa pada saat pengambilan citra digunakan kamera yang rektrifikasinya sejajar atau tegak lurus dengan objek yang akan difoto.
Gambar 4.9 Disparity Map
Disparity yang diperoleh dari citra silinder tersebut tidak begitu jelas karena terdapat noise dari latar dinding dan lantai yang memantulkan cahaya, sehingga diperoleh disparity map yang tidak begitu jelas.
Untuk menggambakan plot 3D dengan objek silinder, kami melakukan interpolasi secara keseluruhan bagian objek, dimana dengan menggunakan rumus interpolasi silinder:
x = r cos 2π (u) y = v z = r sin 2π (u) Keterangan : u = - π sampai π v = ketinggian silinder
Gambar 4.10 Plot 3D
Gambar 4.10 merupakan hasil plot 3D dari objek silinder. Hasil plot 3D tersebut masih tidak menyerupai bentuk objek aslinya. Terlihat bahwa model 3D. Ini juga disebabkan oleh permasalahan pada saat pencarian titik korespodensi yaitu oclusions, noise, dan projective distortion.
4.2 Pembahasan
Setelah melakukan beberapa eksperimen dengan menggunakan objek-objek yang berbeda diperoleh beberapa hal antara lain korespondensi, disparity, depth, epipole line,
dan plot 3D. Dari data-data tersebut kami menemukan beberapa hal yang perlu dianalisa lebih lanjut. Dimana hal-hal tersebut yaitu nilai kedalaman objek. Adanya nilai-nilai yang valid dan tidak valid dari hasil perbandingan antara pengukuran kedalaman dengan penggaris dan pengukuran yang dilakukan oleh program.
4.2.1 Pembahasan Eksperimen dengan Objek Bola
Hasil yang diperoleh dari eksperimen tersebut adalah sebagai berikut:
Gambar 4.11 Titik-titik yang diukur kedalamannya
Gambar 4.11 menunjukan titik-titik dari objek yang akan diukur kedalamannya. Kedalaman tiap titik akan dibandingkan satu sama lain.
Tabel 4.5 Tabel perbandingan jari-jari bola
Tabel diatas merupakan perbandingan antara jari-jari bola sebenarnya dengan jari-jari bola yang diperoleh dari perhitungan kedalaman objek dengan nilai X1 sebagai pusat dan juga sebagai nilai pengurang dalam memperoleh jari-jari yang ditentukan dari depth yang didapatkan oleh program.
Dari tabel tersebut didapatkan hasil bahwa hanya titik X2 yang mempunyai panjang jari-jari yang terjauh dengan titik pembanding X1 karena dengan metode SSD yang dipengaruhi brightness maka dari itu X2 bernilai tidak valid karena nilai brightness lebih tinggi. Sedangkan untuk titik X3 dan X4 panjang jari-jarinya sama karena pada tingkat tersebut nilai brightness sama, dan titik X5 berbeda tetapi mendekati nilai X1 sehingga juga tidak terlalu valid dibandingkan X3 dan X4.
Perbedaan selisih nilai-nilai tersebut juga dipengarhi oleh pengkalibrasian kamera, dimana ada sedikit perbedaan karena adanya penyekalaan yang dilakukan kamera terhadap objek yang difoto sehingga, nilai tidak terlalu tepat. Jenis Objek Jari-jari sebenarnya Titik Nilai depth (z) Perhitungan Jari-jari dari nilai depth Selisih Akurasi Bola r = 2 cm X1 (pusat) 12.4889 cm _ _ _ X2 (atas) 17.9528 cm 5.4639 cm 3.4639 cm 0% X3 (kiri) 14.3622 cm 1.8733 cm 0.1267 cm 93.665% X4 (kanan) 14.3622 cm 1.8733 cm 0.1267 cm 93.665% X5 (bawah) 15.1181 cm 2.6292 cm 0.6292 cm 68.54%
Akurasi terbaik dari nilai kedalaman objek bola yang diperoleh dari eksperimen ini adalah 93.665%
Hal ini disebabkan oleh perbedaan nilai kedalaman karena pada saat pencarian titk korespodensi, titik pada citra kiri tidak sesuai dengan titik-titik dalam citra kanan.
4.2.2 Pembahasan Eksperimen dengan Objek Silinder
Hasil yang diperoleh dari eksperimen tersebut adalah sebagai berikut:
Gambar 4.12 Titik-titik yang diukur kedalamannya
Gambar 4.12 menunjukan titik-titik mana dari objek yang akan diukur kedalamannya. Kedalaman tiap titik akan dibandingkan satu sama lain.
Tabel 4.6 Tabel perbandingan jari-jari silinder
Tabel diatas merupakan perbandingan antara jari-jari silinder sebenarnya dengan jari-jari silinder yang diperoleh dari perhitungan kedalaman objek dengan nilai X1 sebagai pusat dan juga sebagai nilai pengurang dalam memperoleh jari-jari yang ditentukan dari depth yang didapatkan oleh program.
Dari tabel tersebut didapatkan hasil bahwa hanya titik X2 yang mempunyai panjang jari-jari yang hampir sama dengan titik pembanding X1. Sedangkan untuk titik X3 panjang jari-jarinya berbeda jauh. Hal ini disebabkan oleh perbedaan nilai kedalaman karena pada saat pencarian titik-titk korespodensi, titik pada satu citra tidak sesuai dengan titik-titik dalam citra kanan yang dikarenakan adanya kalibrasi kamera.
Akurasi terbaik dari nilai kedalaman objek silinder yang diperoleh dari eksperimen ini adalah 74.016%
Jenis Objek
Jari-jari dan Tinggi sebenarnya
Titik Nilai depth (z)
Perhitungan Jari-jari dari nilai
depth Selisih Silinder r = 2.5 cm t = 4 cm X1 (pusat) 11.9685cm _ _ X2 (kanan) 17.9528cm 5.9843 cm 3.4843 cm X3 (kiri) 15.1181cm 3.1496 cm 0.6496 cm