BAB II
TEORI MOTOR LANGKAH
II.1 Dasar-Dasar Motor Langkah
Motor langkah adalah peralatan elektromagnetik yang mengubah pulsa digital menjadi perputaran mekanis. Rotor pada motor langkah berputar dengan perubahan yang diskrit ketika pulsa elektronik diberikan pada motor tersebut. Kecepatan perputaran motor sangat berhubungan dengan frekuensi pulsa input dan waktu rotasi berhubungan dengan banyaknya pulsa input yang diberikan.
Motor langkah banyak sekali diaplikasikan baik pada kehidupan sehari-hari maupun dalam dunia perindustrian, karena motor langkah memiliki kelebihan-kelebihan, antara lain :
1. perputaran sudut motor sebanding dengan pulsa input;
2. akurasi 3-5% pada setiap langkahnya (dan tidak terakumulasi dari satu langkah ke langkah lainnya) membuat motor langkah memiliki pengaturan posisi yang presisi dan pergerakan yang dapat dilakukan berulang-ulang;
3. respon mulai, berhenti, dan berbalik arah yang sangat baik; 4. tidak terdapat kontak dengan sikat pada motor;
5. motor bereaksi kepada pulsa input digital, sehingga kendalinya adalah lup terbuka. Tidak diperlukan umpan balik untuk mengetahui posisi yang dihasilkan motor langkah. Oleh karena itu, langkah motor lebih sederhana dan lebih murah untuk dikendalikan;
6. dapat mencapai kecepatan putar yang sangat rendah;
7. kecepatan perputaran motor dapat diatur karena sebanding dengan frekuensi pulsa input .[7]
Akan tetapi, motor langkah juga memiliki kekurangan, yaitu :
1. resonansi dapat terjadi apabila motor tidak dikendalikan dengan benar; 2. tidak mudah dioperasikan pada kecepatan tinggi.[7]
II.1.1 Jenis-Jenis Motor Langkah
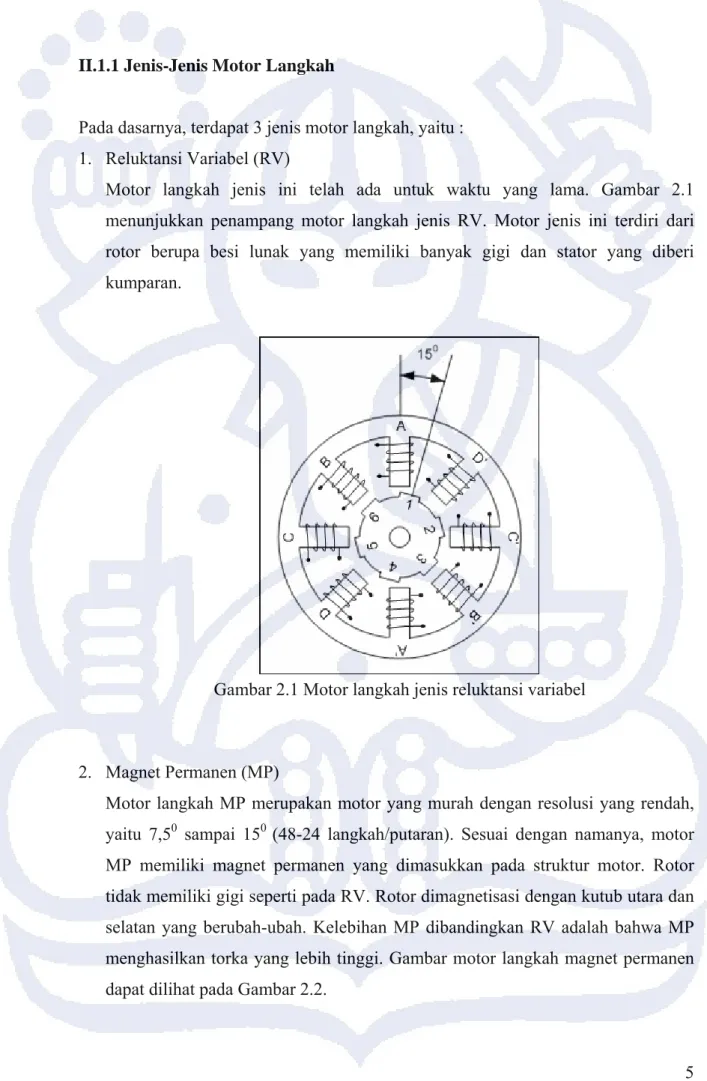
Pada dasarnya, terdapat 3 jenis motor langkah, yaitu : 1. Reluktansi Variabel (RV)
Motor langkah jenis ini telah ada untuk waktu yang lama. Gambar 2.1 menunjukkan penampang motor langkah jenis RV. Motor jenis ini terdiri dari rotor berupa besi lunak yang memiliki banyak gigi dan stator yang diberi kumparan.
Gambar 2.1 Motor langkah jenis reluktansi variabel
2. Magnet Permanen (MP)
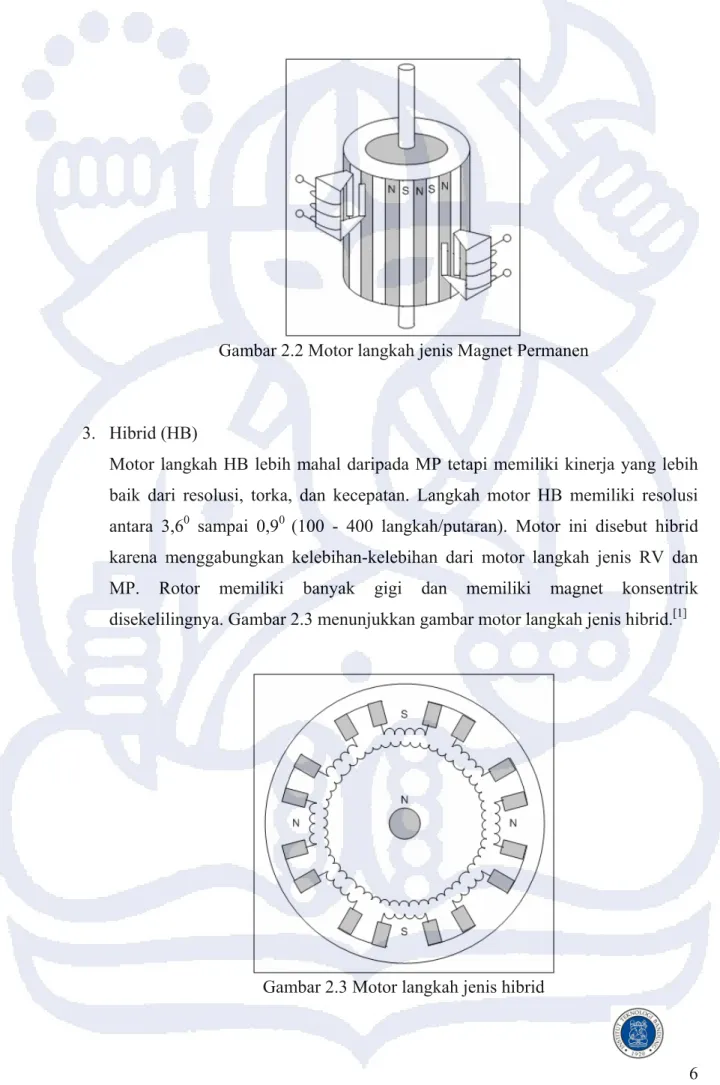
Motor langkah MP merupakan motor yang murah dengan resolusi yang rendah, yaitu 7,50 sampai 150 (48-24 langkah/putaran). Sesuai dengan namanya, motor MP memiliki magnet permanen yang dimasukkan pada struktur motor. Rotor tidak memiliki gigi seperti pada RV. Rotor dimagnetisasi dengan kutub utara dan selatan yang berubah-ubah. Kelebihan MP dibandingkan RV adalah bahwa MP menghasilkan torka yang lebih tinggi. Gambar motor langkah magnet permanen dapat dilihat pada Gambar 2.2.
Gambar 2.2 Motor langkah jenis Magnet Permanen
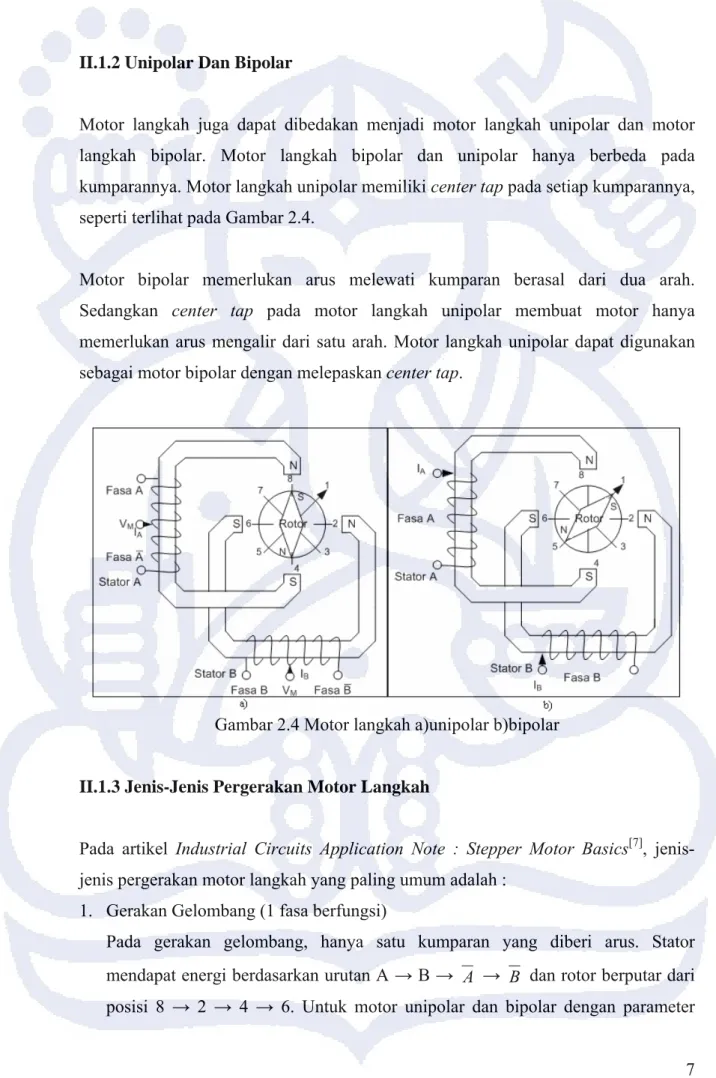
3. Hibrid (HB)
Motor langkah HB lebih mahal daripada MP tetapi memiliki kinerja yang lebih baik dari resolusi, torka, dan kecepatan. Langkah motor HB memiliki resolusi antara 3,60 sampai 0,90 (100 - 400 langkah/putaran). Motor ini disebut hibrid karena menggabungkan kelebihan-kelebihan dari motor langkah jenis RV dan MP. Rotor memiliki banyak gigi dan memiliki magnet konsentrik disekelilingnya. Gambar 2.3 menunjukkan gambar motor langkah jenis hibrid.[1]
II.1.2 Unipolar Dan Bipolar
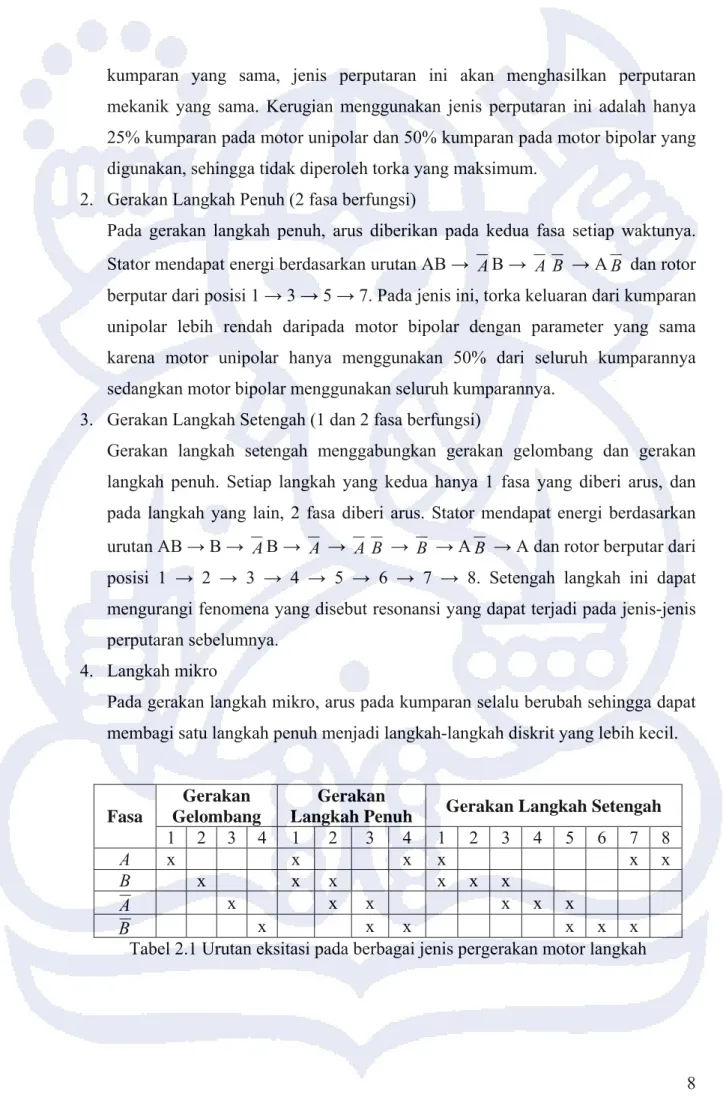
Motor langkah juga dapat dibedakan menjadi motor langkah unipolar dan motor langkah bipolar. Motor langkah bipolar dan unipolar hanya berbeda pada kumparannya. Motor langkah unipolar memiliki center tap pada setiap kumparannya, seperti terlihat pada Gambar 2.4.
Motor bipolar memerlukan arus melewati kumparan berasal dari dua arah. Sedangkan center tap pada motor langkah unipolar membuat motor hanya memerlukan arus mengalir dari satu arah. Motor langkah unipolar dapat digunakan sebagai motor bipolar dengan melepaskan center tap.
Gambar 2.4 Motor langkah a)unipolar b)bipolar
II.1.3 Jenis-Jenis Pergerakan Motor Langkah
Pada artikel Industrial Circuits Application Note : Stepper Motor Basics[7], jenis-jenis pergerakan motor langkah yang paling umum adalah :
1. Gerakan Gelombang (1 fasa berfungsi)
Pada gerakan gelombang, hanya satu kumparan yang diberi arus. Stator mendapat energi berdasarkan urutan A → B → A → B dan rotor berputar dari posisi 8 → 2 → 4 → 6. Untuk motor unipolar dan bipolar dengan parameter
kumparan yang sama, jenis perputaran ini akan menghasilkan perputaran mekanik yang sama. Kerugian menggunakan jenis perputaran ini adalah hanya 25% kumparan pada motor unipolar dan 50% kumparan pada motor bipolar yang digunakan, sehingga tidak diperoleh torka yang maksimum.
2. Gerakan Langkah Penuh (2 fasa berfungsi)
Pada gerakan langkah penuh, arus diberikan pada kedua fasa setiap waktunya. Stator mendapat energi berdasarkan urutan AB → AB → A B → AB dan rotor berputar dari posisi 1 → 3 → 5 → 7. Pada jenis ini, torka keluaran dari kumparan unipolar lebih rendah daripada motor bipolar dengan parameter yang sama karena motor unipolar hanya menggunakan 50% dari seluruh kumparannya sedangkan motor bipolar menggunakan seluruh kumparannya.
3. Gerakan Langkah Setengah (1 dan 2 fasa berfungsi)
Gerakan langkah setengah menggabungkan gerakan gelombang dan gerakan langkah penuh. Setiap langkah yang kedua hanya 1 fasa yang diberi arus, dan pada langkah yang lain, 2 fasa diberi arus. Stator mendapat energi berdasarkan urutan AB → B → AB → A → A B → B → AB → A dan rotor berputar dari posisi 1 → 2 → 3 → 4 → 5 → 6 → 7 → 8. Setengah langkah ini dapat mengurangi fenomena yang disebut resonansi yang dapat terjadi pada jenis-jenis perputaran sebelumnya.
4. Langkah mikro
Pada gerakan langkah mikro, arus pada kumparan selalu berubah sehingga dapat membagi satu langkah penuh menjadi langkah-langkah diskrit yang lebih kecil.
Gerakan Gelombang
Gerakan
Langkah Penuh Gerakan Langkah Setengah Fasa 1 2 3 4 1 2 3 4 1 2 3 4 5 6 7 8 A x x x x x x B x x x x x x A x x x x x x B x x x x x x
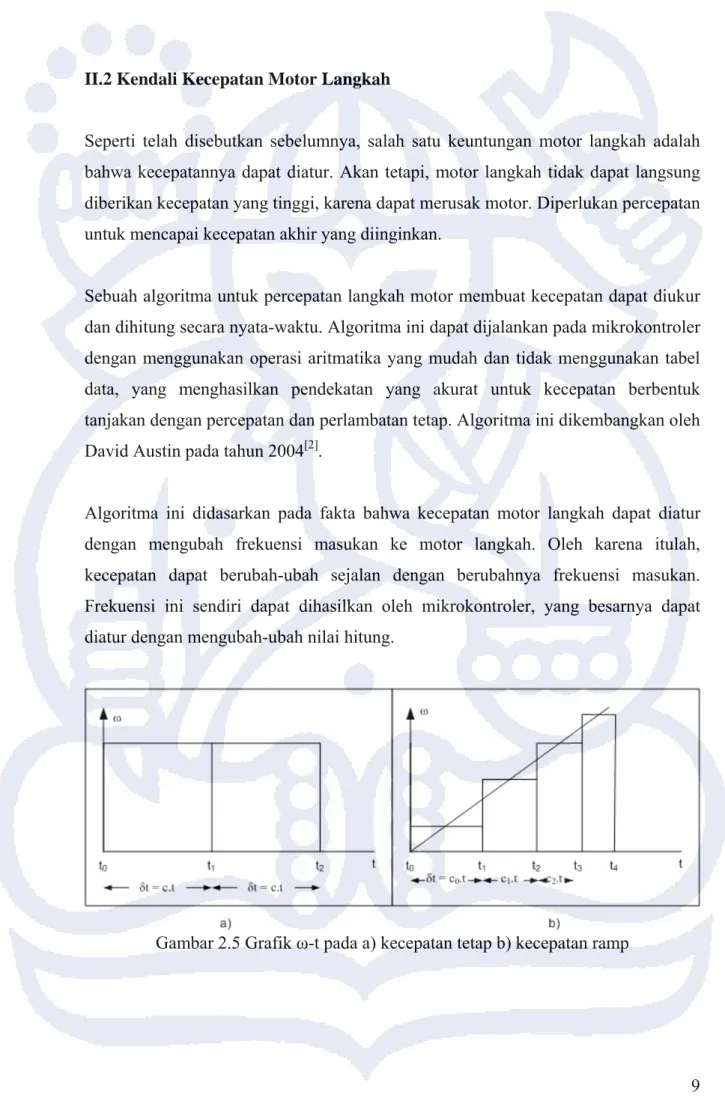
II.2 Kendali Kecepatan Motor Langkah
Seperti telah disebutkan sebelumnya, salah satu keuntungan motor langkah adalah bahwa kecepatannya dapat diatur. Akan tetapi, motor langkah tidak dapat langsung diberikan kecepatan yang tinggi, karena dapat merusak motor. Diperlukan percepatan untuk mencapai kecepatan akhir yang diinginkan.
Sebuah algoritma untuk percepatan langkah motor membuat kecepatan dapat diukur dan dihitung secara nyata-waktu. Algoritma ini dapat dijalankan pada mikrokontroler dengan menggunakan operasi aritmatika yang mudah dan tidak menggunakan tabel data, yang menghasilkan pendekatan yang akurat untuk kecepatan berbentuk tanjakan dengan percepatan dan perlambatan tetap. Algoritma ini dikembangkan oleh David Austin pada tahun 2004[2].
Algoritma ini didasarkan pada fakta bahwa kecepatan motor langkah dapat diatur dengan mengubah frekuensi masukan ke motor langkah. Oleh karena itulah, kecepatan dapat berubah-ubah sejalan dengan berubahnya frekuensi masukan. Frekuensi ini sendiri dapat dihasilkan oleh mikrokontroler, yang besarnya dapat diatur dengan mengubah-ubah nilai hitung.
II.2.1 Penghitungan Nilai Hitung Dengan Pendekatan Deret Taylor
Sesuai dengan artikel oleh David Austin yang berjudul Generate stepper-motor
speed profiles in real time[2], nilai tunda yang diberikan oleh nilai hitung adalah
f c t c t = . = δ (2.1) dengan
δt adalah nilai tunda yang dihasilkan oleh oleh nilai hitung [detik] c adalah nilai hitung
t adalah perioda clock mikrokontroler [detik] f adalah frekuensi clock mikrokontroler [Hz]
Pada kecepatan yang tetap, nilai hitung akan selalu sama. Akan tetapi, untuk membuat kecepatan berubah sesuai dengan bentuk tanjakan, nilai hitung harus dihitung.
Nilai hitung yang pertama dan nilai hitung selanjutnya diberikan dengan persamaan sebagai berikut ω α & . 2 0 f c = (2.2)
(
n n)
c cn = 0. +1− (2.3) denganco adalah nilai hitung yang pertama
α adalah sudut perputaran motor per langkah [rad/langkah]
ω& adalah percepatan yang diinginkan [rad/s2]
cn adalah nilai hitung pada langkah ke-n
n adalah langkah motor
sehingga rasio nilai hitung langkah ke-n dengan langkah sebelumnya adalah
(
)
(
)
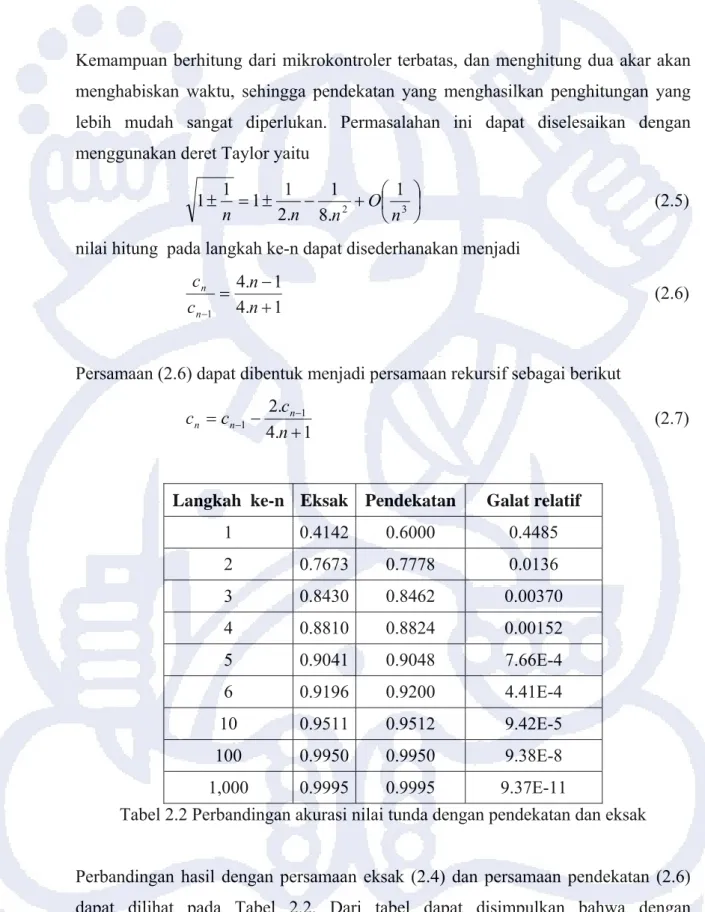
n n n n c n n c c c n n 1 1 1 1 1 1 1 . 1 . 0 0 1 − − − + = − − − + = − (2.4)Kemampuan berhitung dari mikrokontroler terbatas, dan menghitung dua akar akan menghabiskan waktu, sehingga pendekatan yang menghasilkan penghitungan yang lebih mudah sangat diperlukan. Permasalahan ini dapat diselesaikan dengan menggunakan deret Taylor yaitu
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − ± = ± 2 13 . 8 1 . 2 1 1 1 1 n O n n n (2.5)
nilai hitung pada langkah ke-n dapat disederhanakan menjadi 1 . 4 1 . 4 1 + − = − n n c c n n (2.6)
Persamaan (2.6) dapat dibentuk menjadi persamaan rekursif sebagai berikut 1 . 4 . 2 1 1− + = − − n c c c n n n (2.7)
Langkah ke-n Eksak Pendekatan Galat relatif
1 0.4142 0.6000 0.4485 2 0.7673 0.7778 0.0136 3 0.8430 0.8462 0.00370 4 0.8810 0.8824 0.00152 5 0.9041 0.9048 7.66E-4 6 0.9196 0.9200 4.41E-4 10 0.9511 0.9512 9.42E-5 100 0.9950 0.9950 9.38E-8 1,000 0.9995 0.9995 9.37E-11
Tabel 2.2 Perbandingan akurasi nilai tunda dengan pendekatan dan eksak Perbandingan hasil dengan persamaan eksak (2.4) dan persamaan pendekatan (2.6) dapat dilihat pada Tabel 2.2. Dari tabel dapat disimpulkan bahwa dengan penghitungan yang lebih sederhana dan cepat diperolah hasil yang sama, kecuali pada n=1, dimana terdapat galat sebesar 0,44. Cara untuk mengkompensasi galat ini
adalah dengan mengalikan c0 dengan tetapan sebesar 0,676, sehingga persamaan (2.2) menjadi ω α & . 2 . . 676 , 0 0 f c = (2.8)
II.2.2 Perubahan Nilai Percepatan
Apabila saat motor bergerak terjadi perubahan percepatan (misal : dari percepatan berubah ke perlambatan), maka nilai n yang baru harus dihitung. Penghitungan-penghitungan di bawah ini didasarkan pada artikel dari Atmel dengan judul AVR446
: Linear speed control of stepper motor[3].
Waktu yang dibutuhkan untuk melakukan n langkah dengan percepatan ω& adalah ω α & . . 2 n tn = (2.9a)
yang juga dapat dituliskan menjadi α ω . 2 . 2 n t n= & (2.9b)
Oleh karena hubungan antara kecepatan, percepatan, dan waktu adalah ω ω & = n t (2.10)
maka persamaan (2.9b) dapat digabungkan dengan persamaan (2.10) sehingga menjadi α ω ω . 2 . 2 = & n (2.11)
Persamaan di atas menunjukkan bahwa jumlah langkah yang dibutuhkan untuk menghasilkan kecepatan yang diinginkan berbanding terbalik dengan percepatan, atau dengan kata lain :
2 2 1
1.ω& n .ω&
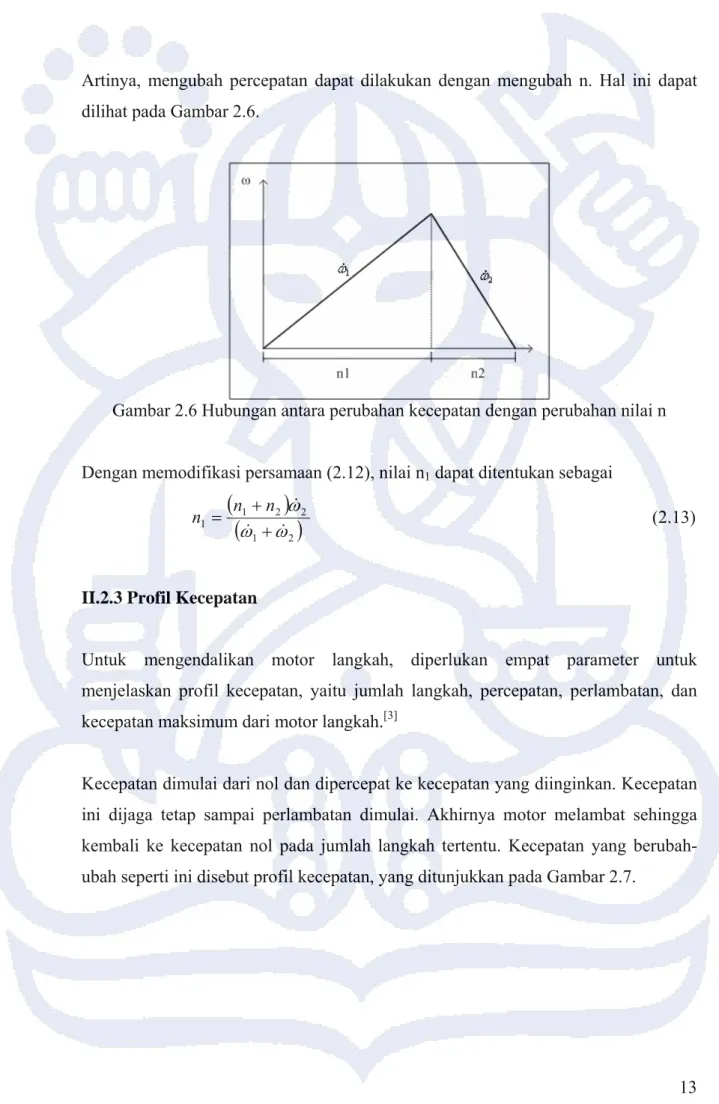
Artinya, mengubah percepatan dapat dilakukan dengan mengubah n. Hal ini dapat dilihat pada Gambar 2.6.
Gambar 2.6 Hubungan antara perubahan kecepatan dengan perubahan nilai n Dengan memodifikasi persamaan (2.12), nilai n1 dapat ditentukan sebagai
(
)
(
1 2)
2 2 1 1 ω ω ω & & & + + = n n n (2.13)II.2.3 Profil Kecepatan
Untuk mengendalikan motor langkah, diperlukan empat parameter untuk menjelaskan profil kecepatan, yaitu jumlah langkah, percepatan, perlambatan, dan kecepatan maksimum dari motor langkah.[3]
Kecepatan dimulai dari nol dan dipercepat ke kecepatan yang diinginkan. Kecepatan ini dijaga tetap sampai perlambatan dimulai. Akhirnya motor melambat sehingga kembali ke kecepatan nol pada jumlah langkah tertentu. Kecepatan yang berubah-ubah seperti ini disebut profil kecepatan, yang ditunjukkan pada Gambar 2.7.
Gambar 2.7 Contoh profil kecepatan
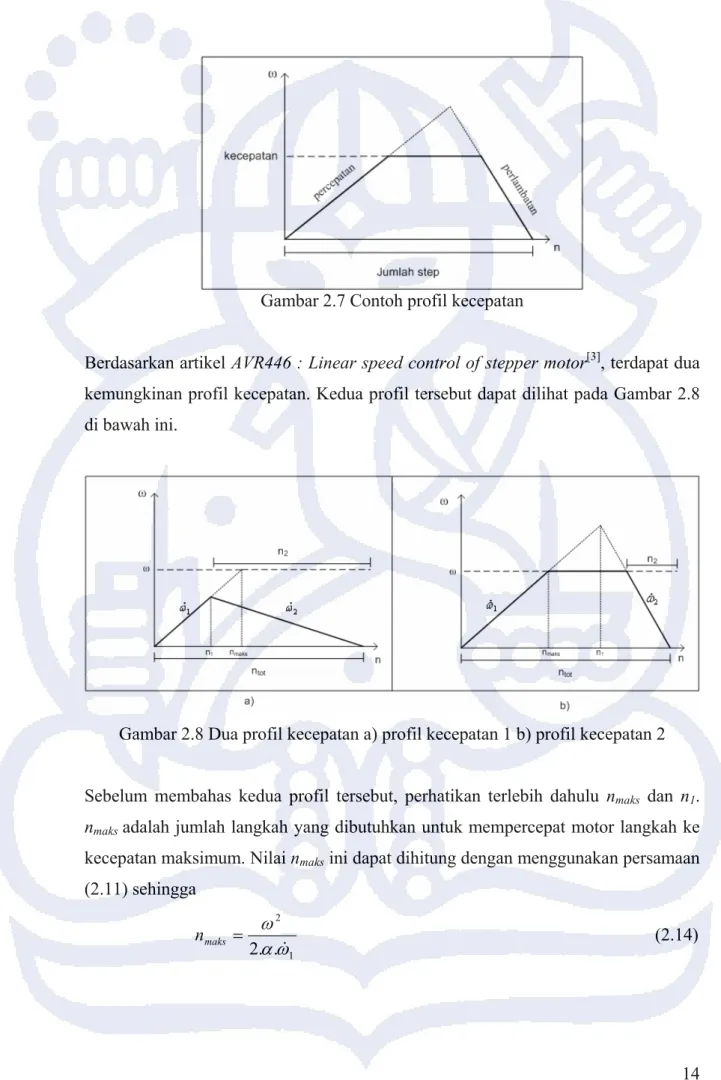
Berdasarkan artikel AVR446 : Linear speed control of stepper motor[3], terdapat dua kemungkinan profil kecepatan. Kedua profil tersebut dapat dilihat pada Gambar 2.8 di bawah ini.
Gambar 2.8 Dua profil kecepatan a) profil kecepatan 1 b) profil kecepatan 2 Sebelum membahas kedua profil tersebut, perhatikan terlebih dahulu nmaks dan n1.
nmaks adalah jumlah langkah yang dibutuhkan untuk mempercepat motor langkah ke
kecepatan maksimum. Nilai nmaks ini dapat dihitung dengan menggunakan persamaan (2.11) sehingga 1 2 . . 2αω ω & = maks n (2.14)
Sedangkan n1 adalah jumlah langkah sebelum perlambatan dimulai (dengan mengabaikan kecepatan maksimum). Nilai n1 didapat melalui persamaan (2.13) yaitu
2 1 2 1 . ω ω ω & & & + = ntot n (2.15)
Berdasarkan letak nmaks dan n1, terdapat dua profil kecepatan, yaitu : 1. Profil kecepatan 1
Profil kecepatan ini terjadi apabila perlambatan dimulai sebelum kecepatan maksimum tercapai (Gambar 2.8a), atau dengan kata lain apabila nmaks > n1. Pada profil ini, nilai n2 adalah :
1
2 n n
n = tot − (2.16)
2. Profil kecepatan 2
Profil kecepatan ini terjadi apabila percepatan berlanjut sampai kecepatan maksimum tercapai (Gambar 2.8b), atau dengan kata lain apabila nmaks < n1. Pada profil ini, percepatan akan dibatasi dengan tercapainya kecepatan maksimum. Perlambatan menjadi tergantung pada nmaks, sehingga n2 untuk profil kecepatan ini adalah 2 1 2 .ω ω & & maks n n = (2.17)