Penerapan Pemodelan Matematika untuk
Visualisasi 3D Perpustakaan
Universitas Mercu Buana
Walid Dulhak1, Abdusy Syarif2 dan, Tri Daryanto3
Jurusan Teknik Informatika, Fakultas Ilmu Komputer, Universitas Mercu Buana Jl. Raya Meruya Selatan, Kembangan, Jakarta, 11650
E-mail : abdusyarif@mercubuana.ac.id2, perut_montok@yahoo.com3
Abstrak -- Suatu pemodelan matematis dalam hal adalah matriks kordinat yang merupakan representasi dari sebuah vektor yang dapat dikembang menjadi sebuah objek 3D. Dengan bantuan tool pemodelan tersebut dapat digunkan untuk membuat sebuah visualisasi perpustakaan. Bentuk visualisasi pemodelan 3 dimensi perpustakan tersubut dengan cara pemberian transformasi dalam bentuk proses rotasi, translasi dan juga diilatasi, sehingga terlhat visualisasinya terlihat seperti bentuk sebenarnya. Kedepan penggunan pemodelan ini dapat digunkan untuk membuat bentuk atau ruang yang lain
Kata kunci : Pemodelan, Matematika,Visualisasi, 3D dan Perpustakaan.
I. PENDAHULUAN
Dengan teknologi komputer yang semakin maju, visualisasi sebuah gambar tidak lagi berbentuk 2 dimensi yang hanya terlihat seperti sebuah gambar yang bersifat statis, tetapi dengan menerapkan model matematis, kita dapat membuat sebuah model visulisasi 3 dimensi yang terlihat seolah-olah nyata dari sebuah benda atau ruang.
II. METODE PENELITIAN
Sistem Koordinat
Mempresentasikan objek dalam tiga dimensi dapat dilakukan dengan mengguakan sistem koordinat yang menyediakan tiga sumbu koordinat. Tiga sumbu ini biasanya dinamakan sumbu X, sumbu Y, dan sumbu Z. Dalam pembuatan visualisasi 3D terdapat dua macam sistem koordinat 3D yaitu sistem tangan kanan dan sistem tangan kiri. Perbedaan kedua sistem ini terletak pada arah sumbu Z. Pada sistem tangan kiri koordinat yang lebih jauh mempuya nilai Z yang lebih besar, sedangkan koordinat yang lebih dekat mempunyai nilai Z yang lebih kecil. Pada sistem
tangan kanan sumbu Z berkebalikan arah dengan sistem tangan kiri.
Gambar 1 Sistem koordinat tangan kanan
Gambar 2 Sistem koordinat tangan kiri Ada operasi-operasi tertentu yang teredapat pada matrik, yang lebih dikenal lagi sebagai tranformasi yang kadang-kadang harus dinyatakan dalam bentu matrik, dan digunakan dengan jalan melakukan perkalian matriks. Trranformasi adalah suatu cara untuk mengubah bentuk objek (memutar, menggeser, dan juga mengubah ukuran). Suatu objek apabila ditranformasikan dari titik koordinat awal (X, Y, Z), maka akan menghasilkan titik koordinat yang baru (X‟, Y‟, Z‟).
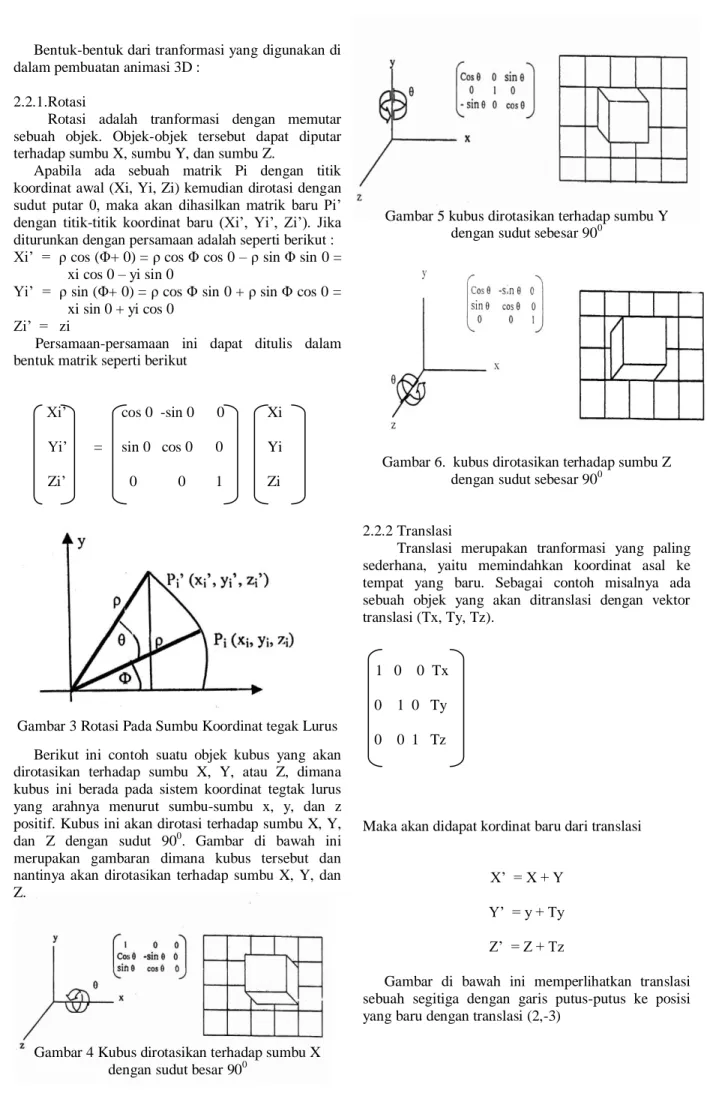
Bentuk-bentuk dari tranformasi yang digunakan di dalam pembuatan animasi 3D :
2.2.1. Rotasi
Rotasi adalah tranformasi dengan memutar sebuah objek. Objek-objek tersebut dapat diputar terhadap sumbu X, sumbu Y, dan sumbu Z.
Apabila ada sebuah matrik Pi dengan titik koordinat awal (Xi, Yi, Zi) kemudian dirotasi dengan sudut putar 0, maka akan dihasilkan matrik baru Pi‟ dengan titik-titik koordinat baru (Xi‟, Yi‟, Zi‟). Jika diturunkan dengan persamaan adalah seperti berikut : Xi‟ = ρ cos (Φ+ 0) = ρ cos Φ cos 0 – ρ sin Φ sin 0 =
xi cos 0 – yi sin 0
Yi‟ = ρ sin (Φ+ 0) = ρ cos Φ sin 0 + ρ sin Φ cos 0 = xi sin 0 + yi cos 0
Zi‟ = zi
Persamaan-persamaan ini dapat ditulis dalam bentuk matrik seperti berikut
Xi‟ cos 0 -sin 0 0 Xi Yi‟ = sin 0 cos 0 0 Yi Zi‟ 0 0 1 Zi
Gambar 3 Rotasi Pada Sumbu Koordinat tegak Lurus Berikut ini contoh suatu objek kubus yang akan dirotasikan terhadap sumbu X, Y, atau Z, dimana kubus ini berada pada sistem koordinat tegtak lurus yang arahnya menurut sumbu-sumbu x, y, dan z positif. Kubus ini akan dirotasi terhadap sumbu X, Y, dan Z dengan sudut 900. Gambar di bawah ini merupakan gambaran dimana kubus tersebut dan nantinya akan dirotasikan terhadap sumbu X, Y, dan Z.
Gambar 4 Kubus dirotasikan terhadap sumbu X dengan sudut besar 900
Gambar 5 kubus dirotasikan terhadap sumbu Y dengan sudut sebesar 900
Gambar 6. kubus dirotasikan terhadap sumbu Z dengan sudut sebesar 900
2.2.2 Translasi
Translasi merupakan tranformasi yang paling sederhana, yaitu memindahkan koordinat asal ke tempat yang baru. Sebagai contoh misalnya ada sebuah objek yang akan ditranslasi dengan vektor translasi (Tx, Ty, Tz).
1 0 0 Tx 0 1 0 Ty 0 0 1 Tz
Maka akan didapat kordinat baru dari translasi
X‟ = X + Y Y‟ = y + Ty Z‟ = Z + Tz
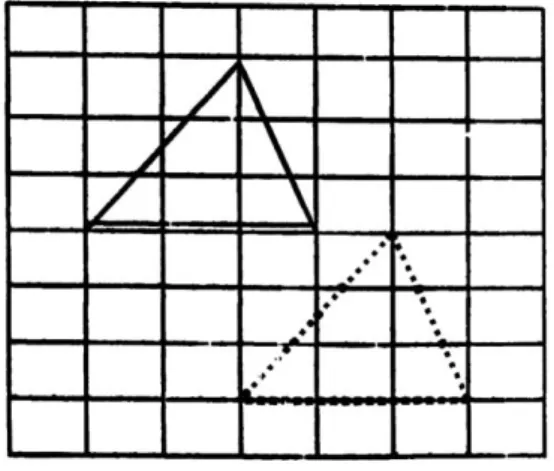
Gambar di bawah ini memperlihatkan translasi sebuah segitiga dengan garis putus-putus ke posisi yang baru dengan translasi (2,-3)
Gambar 7. translasi pada objek segititga
2.2.3. Dilatasi
Dilatasi adalah operator untuk membuat sebuah benda lebih besar atau lebih kecil. Kita dapat mengubah ukuran benda dengan skala tertentu terhadap masing-masing sumbu.
Jenis tranformasi dilatasi yang akan kita tinjau terdiri dari pengubahan skala dari sebuah gambaran sepanjang arah x, y, dan z berturut-turut oleh faktor-faktor α, β, γ. Dengan ini kita artikan bahwa jika sebuah titik Pi mempunyai koordinat (xi, yi, zi) dalam gambaran aslinya, maka titik tersebut akan bergerak ke sebuah titik Pi‟ yang baru dengan koordinat (αxi, βyi, γzi) dalam gambar yang baru itu. Misalkan kita ingin mentranformasikan sebuah kubus satuan dalam gambar asli menjadi lebih besar dengan siku-siku yang dimensinya α x β x γ. Secara sistematis, hal ini dapat dirampungkan dengan perkalian matrik seperti berikut. Definisikanlah sebuah matrik diagonal 3 x 3.
α 0 0 S = 0 β 0 0 0 γ
Maka, jika titk Pi dalam gambar aslinya dinyatakan oleh:
vektor kolom.
Xi Yi Zi
Titik Pi yang dihasilkan oleh tranformasi itu akan dinyatakan dalam vektor kolom.
X‟i α 0 0 Xi
Y‟i 0 β 0 Yi
Z‟i 0 0 γ Zi
Dengan menggunakan matrik koordinat P yang mengandung koordinat-koordinat dari semua n titik dari gambaran yang asli sebagai kolom-kolomnya, maka ke-n titik ini dapat ditranformasikan secara serempak untuk menghasilkan matrik koordinat p‟ dari gambaran yang berskala baru.
α 0 0 X 1 X2...X n S = 0 β 0 Y 1 Y 2 ....Y n 0 0 γ Z 1 Z 2 ...Z n
αx 1 αx 2 ... αx n
= βy 1βy 2 ... βy n = P‟ γz 1 γz 2 ... γz n
Gambar 8 pensaklaan (scale) pada kubus Penulis melakukan uji coba dan implentasi pada masing-masing teori model matematis yang digunakan pada metodologi penelitian
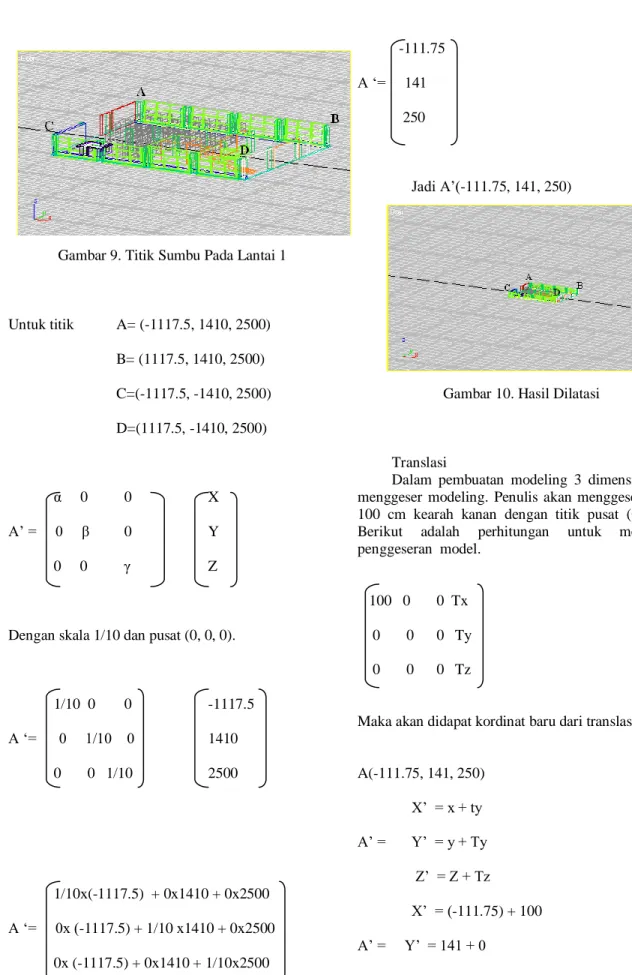
III. IMPLEMENTASI DAN UJI COBA Dilatasi
Dalam pembuatan modeling 3 dimensi (3D) penulis memperbesar ukuran dengan skala 1:1 untuk mempermudah penulisan dalam pembuatan detail model. Kemudian penulis kembali memperkecil model dengan skala 1:20.
Gambar 9. Titik Sumbu Pada Lantai 1 Untuk titik A= (-1117.5, 1410, 2500) B= (1117.5, 1410, 2500) C=(-1117.5, -1410, 2500) D=(1117.5, -1410, 2500) α 0 0 X A‟ = 0 β 0 Y 0 0 γ Z
Dengan skala 1/10 dan pusat (0, 0, 0).
1/10 0 0 -1117.5 A „= 0 1/10 0 1410 0 0 1/10 2500 1/10x(-1117.5) + 0x1410 + 0x2500 A „= 0x (-1117.5) + 1/10 x1410 + 0x2500 0x (-1117.5) + 0x1410 + 1/10x2500 -111.75 A „= 141 250 Jadi A‟(-111.75, 141, 250)
Gambar 10. Hasil Dilatasi
Translasi
Dalam pembuatan modeling 3 dimensi penulis menggeser modeling. Penulis akan menggeser model 100 cm kearah kanan dengan titik pusat (0, 0, 0). Berikut adalah perhitungan untuk melakukan penggeseran model.
100 0 0 Tx 0 0 0 Ty 0 0 0 Tz
Maka akan didapat kordinat baru dari translasi
A(-111.75, 141, 250) X‟ = x + ty A‟ = Y‟ = y + Ty Z‟ = Z + Tz X‟ = (-111.75) + 100 A‟ = Y‟ = 141 + 0
Z‟ = 250 + 0 A‟(-11.75, 141, 250)
Gambar 11. Hasil Translasi
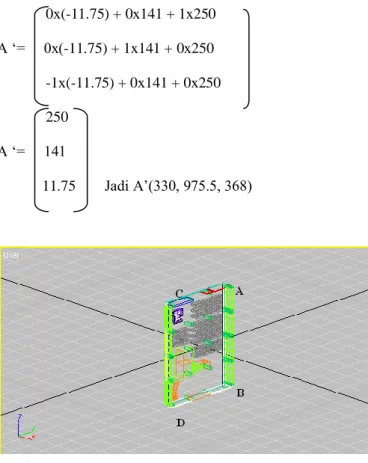
Rotasi
Dalam pembuatan modeling 3 dimensi penulis memutar modeling. Penulis akan merotasi model 90 derajat terhadap sumbu y berlawanan jarum jam dengan titik pusat (0, 0, 0). Berikut adalah perhitungan untuk melakukan rotasi model.
Titik P(x,y,z) dirotasi sebesar a berlawanan arah jarum jam dengan pusat O(0,0) dan diperoleh bayangan P‟(x‟,y‟,z‟) maka:
A (-11.75, 141, 250)
Di rotasi 90 derajat terhadap sumbu y
Cosa 0 sina -11.75 A‟ = 0 1 0 141 -sina 0 Cosa 250 Cos90 0 sin90 -11.75 A‟ = 0 1 0 141 -sin90 0 Cos90 250 0 0 1 -11.75 A‟ = 0 1 0 141 -1 0 0 250 0x(-11.75) + 0x141 + 1x250 A „= 0x(-11.75) + 1x141 + 0x250 -1x(-11.75) + 0x141 + 0x250 250 A „= 141 11.75 Jadi A‟(330, 975.5, 368)
Gambar 12. Hasil Setelah Dirotasi 90 Derajat
IV. KESIMPULAN
Kesimpulan yang dapat diambil dari pemodelan matematis untuk visualisasi 3 dimensi ini, adalah sebagai berikut:
1. Dengan menggunkan pemodelan matematis kita dapat mebuat bentuk pemodelan 3 dimensi dengan penggunaank transformasi koordinat
2. Pemodelan visualisasi ini dapat memperhatkan bentuk dari sebuah ruang dalam hal ini adalah ruang perpustakaan Univeritas Mercu Buana
V. DAFTAR PUSTAKA 1. J.Leon, Steve, 2001. “Aljabar Linier &
Aplikasinya”, Jakarta: Erlangga.
2. Digital Studio, 2007. “Visualisasi 3 Dimensi”, Jakarta: Elex Media Komputindo.
3. Jubilee Enterprise, 2006. “3d Studio Max 7 Utk
Pemula”, PT Elex Media Komputindo kelompok
Gramedia, Jakarta. 4. Non personal, “Blitz3D”,
http://www.blitzbasic.com/, 29 Desember 2008. 5. Non personal, “Blitz3D”,
http://en.wikipedia.org/wiki/Blitz_BASIC, 29 Januari 2009.