Sistem Pengendalian Debit Air Aquaponik
Menggunakan Arduino Uno dan Raspberry PI
Debyo Saptono
Program Studi Teknik Elektro
Sekolah Tinggi Teknik Multimedia Cendikia Abditama Kab. Tangerang – Indonesia
Abstract—Sistem akuaponik yang telah ada umumnya menggunakan sistem penyiraman tanaman mengunakan timer dengan pengatur metode penyiraman otomatis, sehingga proses penyiraman tanaman tidak dapat disesuaikan dengan kebutuhan tanaman itu sendiri. Disamping itu jumlah air yang diperlukan pada media tanam Hal ini akan menyebabkan pemborosan air dan nutrisi. Berdasarkan permasalahan tersebut, maka diperlukan sebuah sistem akuaponik dengan pengaturan debitlembaban, waktu pengaliran air, dan pengaturan ketinggian air untuk pola cocok tanam akuaponik secara otomatis menggunakan mikrokontroler Arduino Uno R3. Hasil yang didapat pada sistem kelembaban, pengaliran air, dan pengaturan ketinggian air sesuai yang diinginkan yang nantinyabisa diterapkan pada tanaman akuaponik sesungguhnya sehingga dapat memberikan hasil dan kualitas yang baik dari tanaman akuaponik tanpa harus dilakukan secara manual.
Kata Kunci— akuaponik, debit air, mikrokontroler, Arduino Uno R3,Raspberry PI
I. PENDAHULUAN
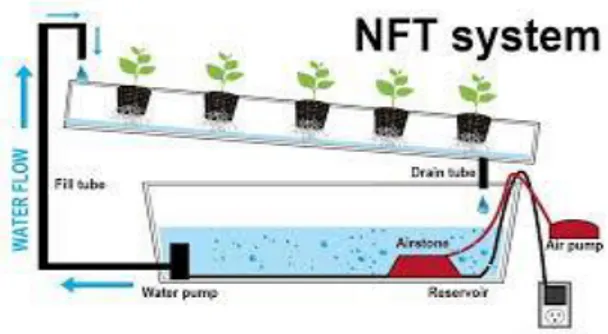
Prinsip kerja aquaponik adalah mengalirkan air dari dalam kolam ikan ke media tempat menanam. Setelah mengaliri tanaman, air akan kembali lagi ke kolam kembali dan seterusnya. Air dari kolam ikan yang kotor dan kaya akan bahan organik akan diserap oleh akar tanaman dan air yang kembali ke
dalam kolam akan menjadi jernih. Pola cocok
tanam Aquaponik ada beberapa jenis diantaranya adalah[5]:
1. Nutrient Film Technique (NFT) merupakan
model budidaya dengan meletakan akar tanaman pada lapisan air yang dangkal. Air tersebut tersirkulasi dan mengandung nutrisi
sesuai kebutuhan tanaman. Perakaran bisa
berkembang di dalam larutan nutrisi.
2. Media filled beds (MFB) adalah bentuk
sederhana dari akuaponik dengan menggunakan kontainer diisi dengan media batu dari tanah liat. Air dari tangki ikan dipompa ke atas tempat media yang berisi tanaman, dan tanaman tumbuh di media batu.
3. Deep Water Culture (DWC) bekerja pada
gagasan tanaman mengambang di atas air. Memungkinkan akar untuk menggantung ke dalam air.
Dari ketiga metode tersebut memerlukan kecukupan air dengan kecepatan aliran air tertentu sesuai
kebutuhan terutama jenis tanaman yang
dibudidayakan. Masing-masing jenis tanaman mempunyai jenis akar yang berbeda-beda. Pada jenis NFT memerlukan aliran air yang tipis dan ketebalannya tidak diperlukan untuk menjaga kecukupan kandungan oksigen pada air disamping mengalirkan nutrisi yang dihasilkan oleh kotoran ikan menuju akar tanaman.
II. LANDASANTEORI
A. Nutrient Film Technique (NFT)
Kunci dari kesuburan tanaman di NFT salah satunya kecepatan aliran air dan kemiringan talang.
Kecepatan Aliran bertujuan gar oksigen terdifusi
dalam air, salah satu caranya adalah dengan membuat air itu bergerak. Dengan membuatnya mengalir, oksigen akan terdifusi terus menerus
sehingga tidak diperlukan aerator untuk menambahkan oksigen.
Semakin cepat aliran air tentu semakin baik, karena air lebih banyak mendifusikan oksigen. Biasanya aliran air per talang untuk budidaya sayur berkisar antara 1-2 liter per menit [5] .
Kemiringan talang minimal 1%, sedangkan
batasnya tidak ada. Dalam penelitian, semakin curam semakin tinggi produksi tanaman. Seiring waktu, tanaman akan terus tumbuh dan akar semakin menebal. Jika akar semakin banyak, kecepatan aliran otomatis melambat. Maka dari itu kemiringan diperlukan agar mempertahankan debit aliran agar tetap cepat. Tanaman yang paling dekat dengan inlet paling banyak mendapat oksigen dan nutrisi. Tanaman yang paling jauh dari inlet mendapat oksigen dan nutrisi yang paling sedikit. Akhirnya pertumbuhan tanaman menjadi tidak seragam. Untuk meminimalkan efek negatif tersebut, panjang talang sebaiknya tidak lebih dari 12 m jika menerapkan kemiringan 1 % dan debit aliran 1 liter per menit per talang.
Gambar 1. Model Cocok Tanam NFT
B. Sensor Ultrasonik[2]
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor
ultrasonik karena sensor ini menggunakan
gelombang ultrasonik (bunyi ultrasonik).
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan
lumba-lumba. Bunyi ultrasonik bisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik dipermukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik dipermukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Pada sensor ultrasonik, gelombang
ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan
memantulkan kembali gelombang tersebut.
Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara
waktu pengiriman gelombang dan waktu
gelombang pantul diterima.
Gambar 2. Cara Kerja Sensor Ultrasonik dengan
Transmitter dan Receiver
Berikut merupakan penjelasan secara detail mengenai cara kerja sensor ultrasonik yaitu : Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut. Setelah gelombang
pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut.
HC-SR04 sensor ultrasonik menggunakan sonar untuk menentukan jarak ke objek seperti pada kelelawar lakukan saat terbang. sensor ini memiliki kemampuan deteksi yang sangat baik dengan akurasi tinggi dan pembacaan stabil dalam paket yang mudah digunakan. Dari 2cm - 400 cm atau 1 inci sampai 4 meter. dalam pengoperasiannya tidak terpengaruh oleh sinar matahari atau bahan hitam seperti pengukur jarak Sharp GP infrared (meskipun akustik bahan lembut seperti kain bisa sulit untuk mendeteksi).
Gambar 5. Sensor Ultrasonik HC-SR04
C. Sensor Debit Air[3]
Sensor Debit Air terdiri dari tubuh katup plastik, rotor air, dan sensor hall effect. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal (SIG) selain jalur 5V dc dan Ground.
Gambar 3. Sensor Debit Air
Gambar 4. Rangkaian skematik Sensor Debit Air
D. Relay
Sebuah relay elektromagnetik sederhana terdiri dari kumparan kawat yang membungkus sebuah inti besi, sebuah kuk besi untuk menahan alur ux magnetik, sebuah angker (jangkar) besi yang dapat bergerak dan satu set atau lebih kontak. Angker tergantung pada kuk dan terhubung secara mekanik dengan kontak yang bergerak. Angker ditahan oleh pegas, sehingga ketika relay diputus, maka ada celah udara dalam rangkaian magnetik. Ketika arus listrik dilewatkan melalui kumparan maka akan dihasilkan medan elektromagnetik yang mengaktifkan angker, dan akibat dari bergeraknya
kontak yang bergerak membuat terjadinya
penyambungan atau pemutusan (bergantung pada konstruksi) dengan kontak yang diam. Ketika arus ke koil diputuskan, angker dikembalikan dengan paksa ke posisi awal, biasanya hal ini dilakukan oleh pegas, tetapi gaya gravitasi juga sering digunakan, umumnya pada starter motor industri. Pada umumnya relay diproduksi agar beroperasi dengan cepat. Pada aplikasi bertegangan rendah hal
ini bertujuan untuk mengurangi kebisingan
sedangkan pada aplikasi bertegangan tinggi untuk mengurangi terjadinya percikan api.
Gambar 6. Modul Relay
E. Pompa Air Akuarium
Pompa air adalah suatu mesin yang digunakan untuk memindahkan cairan dari satu tempat
ketempat lain, melalui suatu pipa (saluran) dengan
cara menambah energi pada cairan yang
dipindahkan dan berlangsung kontinyu.
Gambar 7. Pompa Air Akuarium
Pompa digunakan untuk mensuplai cairan
bertekanan rendah dan tinggi dengan kecepatan aliran yang tinggi dan rendah, yang bergantung pada aplikasinya.
F. Selenoid valve
Solenoid valve merupakan katup yang dikendalikan dengan arus listrik baik AC maupun DC melalui
kumparan / selenoida. Solenoid valve ini
merupakan elemen kontrol yang paling sering digunakan dalam sistem fluida.
Gambar 8. Selenoid valve DC 5V
Gambar 9. Cara kerja Selenoid valve
Solenoid valve akan bekerja bila kumparan/coil mendapatkan tegangan arus listrik yang sesuai dengan tegangan kerja(kebanyakan tegangan kerja
solenoid valve adalah 100/200VAC dan
kebanyakan tegangan kerja pada tegangan DC adalah 12/24VDC). Dan sebuah pin akan tertarik karena gaya magnet yang dihasilkan dari kumparan selenoida tersebut. Dan saat pin tersebut ditarik naik maka fluida akan mengalir dari ruang C menuju ke bagian D dengan cepat. Sehingga tekanan di ruang C turun dan tekanan fluida yang masuk mengangkat diafragma. Sehingga katup utama terbuka dan fluida mengalir langsung dari A ke F.
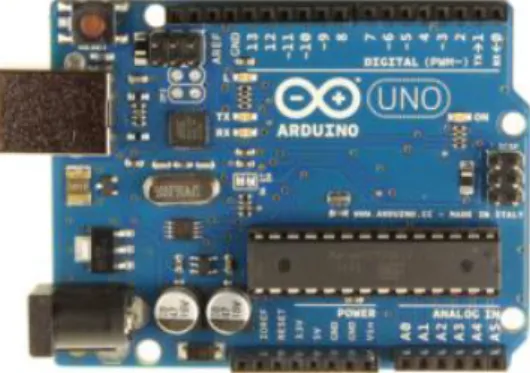
G. Arduino Uno R[2][5]
Arduino Uno R3 menggunakan keluarga mikrokontroler ATMEGA yang dirilis oleh Atmel sebagai basisnya. Untuk eksibilitas, program dimasukkan melalui bootloader meskipun ada opsi untuk mem-bypass bootloader dan menggunakan
downloader untuk memprogram mikrokontroler
secara langsung melalui port ISP. Ada beberapa tipe
board Arduino yang telah dirilis tetapi yang umum
digunakan saat ini adalah Arduino Uno dan Arduino Mega. Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan PC, arduino lainnya,
atau mikrokontoler lainnya. Mikrokontroler
ATmega328 menyediakan komunikasi serial UART TTL (5V) melalui Pin digital 0 (RX) dan Pin digital 1 (TX). Sebuah mikrokontroler lain (ATmega16u2) dipasang pada board yang sama untuk menyediakan komunikasi serial dengan PC melalui USB (Universal Serial BUS) dan terhubung dengan mikrokontroler utama melalui Pin digital 0 dan 1 sehingga tidak dapat digunakan secara bersamaan dengan perangkat lain. Untuk itu Arduino
menyediakan fasilitas SoftSerial yang akan
mengemulasi UART TTL ke Pin digital lain yang masih tersisa. ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Mikrokontroler ATMega328 pada Arduino Uno telah diisi dengan
boot-loader yang memungkinkan pemrograman
dengan Arduino IDE melalui komunikasi serial UART tanpa perangkat tambahan (programmer /
downloader) meskipun pengguna dapat mem-bypass bootloader dan memprogram mikrokontroler
menggunakan perangkat programmer melalui
Gambar 10. Modul Arduino Uno R3
H. Raspberry PI[4]
Raspberry Pi adalah minikit komputer papan
tunggal (Single-board Computer) atau SBC seukuran kartu kredit yang dihubungkan ke monitor komputer atau televisi biasa juga disebut RasPi / Rpi, Ras Pi ini merupakan komputer yang lengkap dan dari penampilannya (tanpa kotak) hampir seolah mainan bagi penggemar / penghobi elektronik. RaspPi ini menggunakan keyboard standar dan mouse dalam pengoperasiannya. RasPi ini adalah perangkat kecil yang mampu dan memungkinkan orang dari segala usia untuk mengeksplorasi komputasi. RasPi ini mampu melakukan segala sesuatu yang diharapkan seperti komputer desktop, dari browsing internet dan menonton video high definition, untuk membuat
spreadsheet, pengolah kata, dan bermain game.
Raspberry Pi beroperasi menggunakan bahasa tingkat tinggi Python dan sistem operasi dengan OS Linux. Raspberry Pi telah dilengkapi dengan semua
fungsi layaknya sebuah komputer lengkap,
menggunakan SoC (System-on-a-chip) ARM
Gambar 11. Modul Raspberry PI
I. Ubidots[1]
Ubidots adalah sebuah platform Internet of
Things yang berasal dari Boston, Amerika Serikat.
Platform ini menawarkan jasa gratis dan berbayar dengan ketentuan sensor yang bisa dipakai jika memakai jasa free user dibatasi hingga 5 sensor.
Ubidots juga memiliki layanan notifikasi SMS dan email jika dengan trigger yang dibuat berdasarkan data sensor yang user tetapkan
sebelumnya. Untuk penggunaannya, Ubidots
tergolong mudah. Setiap development board yang beredar di pasaran sudah terdokumentasi dengan baik dengan tutorial yang mudah dimengerti.
III. PERANCANGANDANIMPLEMENTASI A. Blok Diagram Sistem
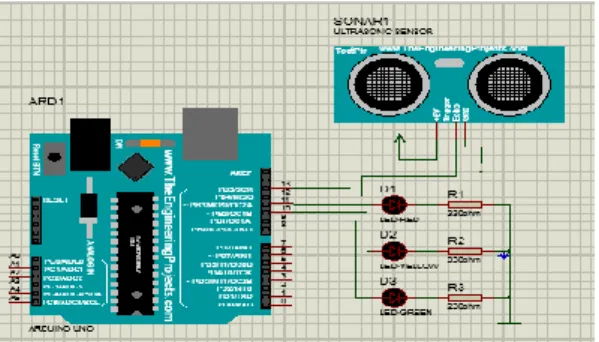
Sensor ultrasonik akan diaktifkan melalui pin trigger maka bagian transmitter (TX) pada sensor ultrasonik akan mulai memancarkan sinyal gelombang ultrasonik. Apabila ada sebuah obyek dalam hal ini yaitu air yang mendekati / menghalangi pancaran sinyal tersebut maka sinyal akan terpantul dan akan diterima oleh bagian
receiver (RX) sensor ultrasonik. Selanjutnya akan
dikirimkan ke mikrokontroler Arduino UNO melalui pin echo untuk diproses dan dikonversi menjadi data perhitungan jarak ukur sensor. Sensor debit air digunakan untuk memantau kecepatan aliran air pada paralon sebagai media tanam.
Sensor Ultrasonik (HC-SR04) Arduino Uno R3 INPUT PROSES OUTPUT RaspberryPI Selenoid valve Relay pompa air
Sensor debit Air
Gambar 12. Blok Diagram Sistem Pengendalian
Mulai Inisialisasi Baca Sensor Ultrasonik dan debit air Ketinggian Permukaan Air > 10Cm & debit > 2l/ menit Relay ON 1 Tidak Ya RELAY OFF 1 Selesai Ketinggian Air < 10Cm & debit < 2l/ menit RELAY ON Ya Tidak
Output pada alat ini, yaitu sebuah relay yang
digunakan untuk mengendalikan pompa air yang diletakkan didalam bak fiber tempat ikan . Relay akan mengatur on-off pompa berdasarkan respon yang diberikan oleh kedua sensor pendeteksi ketinggian air dan kecepatana aliran air. Sensor ultrasonik memberikan sinyal bahwa kondisi pada paralon membutuhkan air atau kurang dari yang dibutuhkan maka pompa air yang ada dalam akuarium akan aktif dan mengalirkan air kedalam paralon sebagai media tanam. Sensor debit air memberikan sinyal pada kondisi kecepatan aliran air tidak sesuai yang diharapkan.
Pada bagian proses terdapat Arduino Uno yang merupakan sebuah mikrokontroler berbasis ATMega328p. Selain itu juga menggunakan sebuah Raspberry Pi yang dikomunikasikan secara serial dengan Arduino Uno, Raspberry Pi digunakan untuk mengirimkan nilai yang di dapat dari pembacaan sensor ke Webserver.
B. Diagran Alur Program
Gambar 13. Flowchart sistem pengendalian debit air sistem
aquaponik NFT
Tahap awal proses inisialiasi dilakukan oleh program yang berada di Arduino Uno dengan melakukan inisialiasi
C. Rangkaian
Berikut rangkaian dan koneksi yang digunakan dalam sistem pengendalian debit alir hidropoik jenit NFT.
Gambar 14. Koneksi port Arduino ke sensor ultrasonik
Gambar 15 Koneksi port Arduino ke sensor debit alir
Komunikasi serial ini perlu dilakukan supaya data yang sudah didapatkan dapat dikirim ke Ubidots. Untuk mengirimkan data diperlukan bantuan dari Raspberry Pi yang terhubung dengan internet. Komunikasi serial dilakukan dengan menggunakan kabel USB yang masing-masing dihubungkan dengan port USB yang ada pada Arduino Uno dan Raspberry Pi. Modul yang digunakan untuk komunikasinya yaitu Pyserial.
D. Pengujian Alat
Berikut ini hasil pengujian yang telah dilakukan pada sistem pengendalian debit air hidroponik jenis NFT.
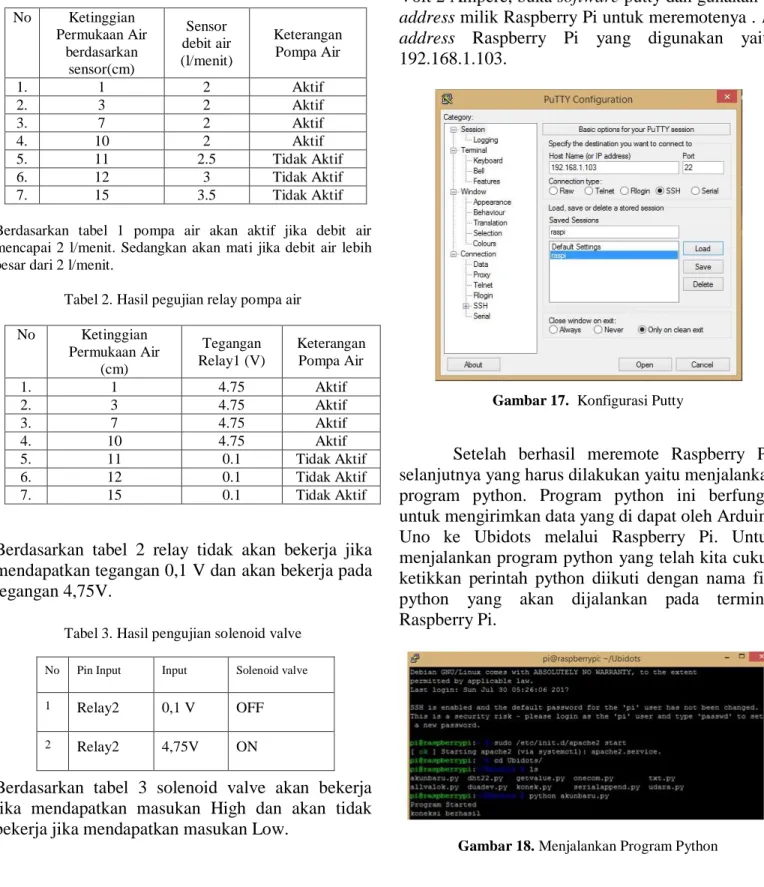
Tabel 1. Hasil pengujian sensor debit air No Ketinggian Permukaan Air berdasarkan sensor(cm) Sensor debit air (l/menit) Keterangan Pompa Air 1. 1 2 Aktif 2. 3 2 Aktif 3. 7 2 Aktif 4. 10 2 Aktif 5. 11 2.5 Tidak Aktif 6. 12 3 Tidak Aktif 7. 15 3.5 Tidak Aktif
Berdasarkan tabel 1 pompa air akan aktif jika debit air mencapai 2 l/menit. Sedangkan akan mati jika debit air lebih besar dari 2 l/menit.
Tabel 2. Hasil pegujian relay pompa air No Ketinggian Permukaan Air (cm) Tegangan Relay1 (V) Keterangan Pompa Air 1. 1 4.75 Aktif 2. 3 4.75 Aktif 3. 7 4.75 Aktif 4. 10 4.75 Aktif 5. 11 0.1 Tidak Aktif 6. 12 0.1 Tidak Aktif 7. 15 0.1 Tidak Aktif
Berdasarkan tabel 2 relay tidak akan bekerja jika mendapatkan tegangan 0,1 V dan akan bekerja pada tegangan 4,75V.
Tabel 3. Hasil pengujian solenoid valve
No Pin Input Input Solenoid valve 1 Relay2 0,1 V OFF 2 Relay2 4,75V ON
Berdasarkan tabel 3 solenoid valve akan bekerja jika mendapatkan masukan High dan akan tidak bekerja jika mendapatkan masukan Low.
Sebelum melakukan pengujian perlu dipastikan semua komponen alat sudah terhubung dengan baik
dan alat sudah terhubung dengan laptop
menggunakan kabel LAN untuk meremote alat tersebut. Setelah alat dihubungkan dengan adaptor 5 Volt 2 Ampere, buka software putty dan gunakan ip
address milik Raspberry Pi untuk meremotenya . Ip address Raspberry Pi yang digunakan yaitu
192.168.1.103.
Gambar 17. Konfigurasi Putty
Setelah berhasil meremote Raspberry Pi, selanjutnya yang harus dilakukan yaitu menjalankan program python. Program python ini berfungsi untuk mengirimkan data yang di dapat oleh Arduino Uno ke Ubidots melalui Raspberry Pi. Untuk menjalankan program python yang telah kita cukup ketikkan perintah python diikuti dengan nama file python yang akan dijalankan pada terminal Raspberry Pi.
IV. KESIMPULAN
Sistem pengendalian debit air sistem aquaponik jenis NFT dapat bekerja dengan baik. Saat debit air dari awal sampai mencapai 2 l/menit maka akan mengaktifkan pompa air, sedangkan pompa akan mati jika debit air lebih besar dari 2 l/menit. Relay 1 dan relay 2 akan bekerja jika mendapatkan tegangan 4,75 V an akan tidak bekerja pada
tegangan 0,1 V. Berdasarkan pengujian
mengunakan ubidots hasil pengukuran hasil ketinggian permukaan air dan besarnya debit air dapat dikirimkan melalui webserver sehingga dapat dilihat hasilnya secara jarak jauh.
Daftar Pustaka
[1] G Kesavan et Al, “ 24 Hour IoT Framework For Monitoring and Managing Home Automation”,2016 International Confernce on Inventive Computation Technologies(ICICT), 26-27 August 2016 [2] Ibnu Siroj,”Perancangan Sistem Kendali Aquaponik Menggunakan
Arduino Uno R3”, jurnal skripsi Universitas Gunadarma, 03 Desember 2016.
[3] Arif Azhari,Soeharwinto,”Perancangan Sistem Informasi debit Air Berbasis Arduino Uno”, jurnal SINGUDA ENSIKOM Vol.13 No36, November 2015.
[4] Joseph Renus Lengo Bani,“Perancangan Sistem Kontrol Perangkat Listrik Berbasis Web Server Menggunakan Raspberry PI”, jurnal skripsi Universitas Gunadarma, 01 November 2014.
[5] Arief Andriansyah,”Perancangan Sistem Kontrol Perangkat Listrik Pada Kolam Ikan Berbasis Arduino Uno R3”, jurnal skripsi Universitas Gunadarma, 13 September 2014.
[6] Meg Stout, “The-Complete-Idiots-Guide-to-Aquaponic-Gardening”,ebook,ALPHA( A member of Penguin Group(USA) Inc, 2013.