OTOMATISASI SISTEM PENGOLAHAN AIR LAUT MENJADI AIR
TAWAR DENGAN PRINSIP REVERSE OSMOSIS BERBASIS
MIKROKONTROLER
(Sub Judul :
“ Sensor dan Monitoring Sistem ”)
Renny Rakhmawati, ST. MT1 Ir.Hendik Eko HS, MT2 Zulva Tri Dianti3
, Dosen Pembimbing 1 Dosen Pembimbing2 Mahasiswa Jurusan Elektro Industri3
Politeknik Elektronika Negeri Surabaya(PENS)
Institut Teknologi Sepuluh Nopember(ITS), Surabaya, Indonesia Email : [email protected]
ABSTRAK
Reverse Osmosis merupakan suatu sistem pengolahan air dari yang mempunyai konsentrasi tinggi
menjadi air tawar yang mempunyai konsentrasi agak rendah (encer) dikarenakan adanya tekanan osmosis. Penerapan sistem ini lebih efisien dan dapat diandalkan karena air melewati membrane semipermiabel yang kerapatannya 0,0001 mikron. Teknologi ini menggunakan driver Chopper untuk mengontrol air masuk dan keluar. Visualisasinya agar kita dapat mengetahui kinerjanya secara langsung adalah dengan Mikrokontroler ATMega 16.
Pada teknologi ini juga terdapat sensor kadar garam (TDS), sensor pH, sensor level air dan sensor tekanan. Sensor-sensor yang ada dalam teknologi ini berfungsi untuk membantu keakuratan data yang diambil. Masing-masing sensor mempunyai fungsi sendiri-sendiri yaitu untuk mengetahui kadar garam yang ada pada air baik sebelum dipompa maupun setelah dipompa, sensor pH untuk mengetahui pH air yang dihasilkan, sensor level air untuk mengetahui level air yang terdapat pada sistem dan sensor tekanan untuk mendeteksi tekanan yang dihasilkan dalam sistem.
Kata Kunci : Mikrokontroler ATMega 16, Reverse Osmosis, Sensor pH, Sensor TDS, Sensor Level Air, Sensor Tekanan
1. PENDAHULUAN
Air merupakan sumber daya alam yang sangat penting bagi kehidupan di bumi. Persediaan akan air layak pakai dirasakan semakin berkurang dan perlu adanya sebuah teknologi yang dapat mendaur ulang air menjadi air yang layak konsumsi. Air banyak digunakan
oleh manusia, tidak hanya pada
keperluan rumah tangga, tetapi juga
untuk keperluan industri. Jika
ketersediaan air layak pakai terus
menurun akan membawa dampak
negatif, terutama bidang kesehatan.
Teknologi penyaringan air dapat
dilakukan secara otomatis dengan
bantuan mikrokontroler dimana
aplikasinya dapat kita tentukan melalui bahasa pemrograman.
Proses Reverse Osmosis terdiri dari
beberapa peralatan seperti pompa
tekanan tinggi (Booster Pump), Katup On/Off, sensor tekanan air, TDS meter
(Total Dissolved Solid), pH meter,
pre-filter water treatment, dan pre-filter Reverse Osmosis. Dari beberapa alat tersebut
akan dikombinasi dengan mikrokontroler
untuk otomatisasi sistem Reverse
Osmosis. Mikrokontroler akan mengatur
keseimbangan arus inlet air laut dan arus outlet air limbah. Mikrokontroler juga memonitor besarnya tekanan air yang bekerja pada sistem untuk mengetahui kualitas produk dari sistem Reverse
Osmosis.
Pada proyek akhir ini dijelaskan bahwa kualitas air tawar diukur dengan sensor pH dan TDS meter. Kedua sensor tersebut sebagai monitoring air sebelum dan sesudah proses. Sebelum air diproses secara Reverse Osmosis terlebih dahulu air laut di ukur kadar garamnya dengan
TDS meter dan nantinya akan
dibandingkan dengan hasil kadar garam
air tawar setelah proses Reverse
(derajat keasaman), sensor ini juga sebagai monitoring antara air yang belum diproses dan setelah diproses. Pada sensor tekanan air, diharapkan tekanannya konstan antara 40 – 50 Psi (pound per square inch) yang merupakan output dari pompa tekanan tinggi (Booster Pump). Setelah tekanan air pada filter terpenuhi, maka dihasilkan air tawar dengan tingkat kekeruhan yang lebih rendah dan pH yang sesuai. Air yang tidak berhasil melewati membran
Reverse Osmosis akan keluar melalui Reject Valve sebagai limbah.
Dari penjelasan di atas dapat
diketahui beberapa target dari pembuatan proyek akhir ini adalah sebagai berikut :
1. Kapasitas Booster Pump 100 PSI
(pound per square inch)
2. Pressure Filter (40 – 50 PSI) 3. Kadar garam air tawar 20% -
30% dari TDS air laut
4. Derajat Keasaman air tawar 6.5 – 7.5 (±5%)
1.1 Tujuan
Pembuatan proyek akhir Otomatisasi Sistem Pengolahan Air Laut Menjadi Air Tawar dengan Prinsip Reverse Osmosis Berbasis Mikrokontroler, selain sebagai
persyaratan penyelesaian studi
Pendidikan Diploma III Politeknik
Elektronika Negeri Surabaya, juga
mempunyai tujuan khusus yaitu
membuat prototype sistem pengolahan air dengan metode reverse osmosis untuk
skala rumah tangga berbasis
mikrokontroler. Selain itu alat ini berfungsi untuk menghasilkan air tawar yang lebih bersih dan sehat dengan cara pengukuran pH dan kadar garam yang terkandung dalam air hasil olahan. Tampilan dari prototype sistem ini
adalah dengan menggunakan LCD
(Liquid Crystal Displays) 16x4 1.2 BatasanMasalah
Pada rincian permasalahan, maka didapat rumusan masalah pada hardware sebagai berikut :
1. Bagaimana cara mengidentifikasi
tekanan air yang masuk
menggunakan pressure gauge sensor
?
2. Bagaimana cara menampilkan
tekanan dan level air pada LCD 16x4 ?
3. Bagaimana cara mengatur besar
kecilnya PWM (Pulse Width
Modulation) untuk kecepatan motor ?
4. Bagaimana cara otomatisasi sistem dengan mikrokontroler ATMega16 ? tegangan dan PWM (Pulse Width
Modulation) ?
2. Perencanaan dan PembuatanAlat
Pada pembuatan sistem monitoring untuk proyek akhir Sistem Pengolahan Air dengan Prinsip Reverse Osmosis ini
terdapat berbagai rancangan yang
tersebut dibawah ini. 2.1 Blok Diagram
2.1.1 Konfigurasi Input Output
Alamat Keterangan
Port A.0 Sensor Tekanan
Port A.1 Tegangan Output Buck
Port A.2 Tegangan Accu
Port A.3 Sensor level Output
Port A.4 Tegangan Charging
Port B.0 Buzzer
Port B.1 Input Valve
Port B.2 Lampu Stop
Port B.3 Output Valve
Port B.4 Lampu Run
Port B.5 Lampu Full
Port B.6 Lampu Medium
Port B.7 Lampu Low
Port C.0-7 LCD
Port D.0 Switch Accu
Pin D.2 Level 1
Pin D.3 Level 2
Pin D.4 Level 3
Pin D.6 Pressure switch
Port D.7 Sinyal PWM
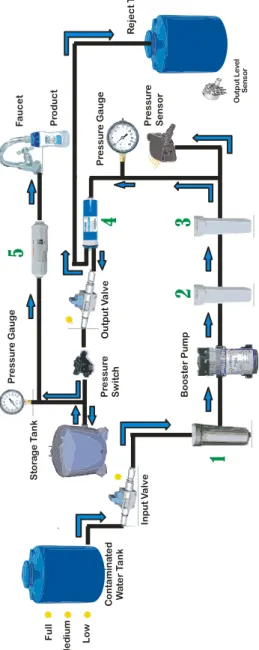
2.1.2 Perancangan sistem
Dalam proyek akhir Sistem
Pengolahan Air ini, terdapat banyak
perancangan dari hardware,
diantaranya adalah pembuatan sistem seperti yang tampak pada Gambar 3.2. Penulis membuat sebuah box yang ditunjukkan pada Gambar 3.3 yang didalamnya berisi semua komponen yang mendukung Sistem pengolahan Air. Dalam box juga terdapat kontrol panel sistem yang nantinya akan memudahkan user untuk mengetahui prosesnya.
Berikut Spesifikasi alat Reverse
Osmosis:
1. Sediment 5 Micron
Membuang partikel-partikel seperti debu, karat, tanah, dsb.
2. Sediment 1 Micron
Menyaring partikel-partikel dengan ukuran lebih kecil.
3. Granular Active Carbon (GAC)
Berbentuk butiran untuk menyerap
zat-zat berbahaya seperti: kaporit,
karsinogen, detergen, insektisida dll 4. Membran Reverse Osmosis
Membuang polutan – polutan berbahaya sampai tingkat terkecil melalui membran berukuran 1 / 10.000 micron
5. Post-Carbon
Menyerap bau; mengembalikan rasa serta menghambat pertumbuhan micro-organisme.
2.1.3 Perancangan Sensor Tekanan
Sensor tekanan pada sistem ini
digunakan sebagai pembanding
antara manometer atau pressure
gauge dengan sensor tekanan analog
yang digunakan untuk mendeteksi tekanan pada filter reverse osmosis. Selain itu, rangkaian sensor tekanan ini juga digunakan sebagai umpan balik untuk mikrokontroler. Dibawah ini merupakan gambar rangkaian sensor tekanan.
Gambar 3.3: Rangkaian Sensor
Tegangan
ada Gambar 3.3, rangkaian sensor tegangan diatas cara kerjanya adalah sebagai berikut. Rangkaian sensor ini mendapat sumber dari battery kotak 9 volt lalu masuk ke regulator tegangan IC7805 yang keluarannya adalah 5 volt dan dilanjutkan ke rangkaian jembatan wheatstone yang terdiri dari
1
2
3
4
5
St o ra g e T a n k R e je c t T a n k O utp ut Le ve l S en so r Fa u c e t Pr e ss u re G a u g e O u tp u t V a lv e In p u t V a lv e Pr e ss u re Sw it ch Pr e ss u re G a u g e Pr e ss u re Se n so r Bo o st e r Pu mp C o n ta mi n at e d W at e r Ta n k Pr o d u c t Low Me d iu m F u ll4 resistor dan salah satu dari resistor tersebut untuk strain gauge. Setelah itu keluaran dari strain gauge masuk
ke rangkaian op-amp untuk
penguatan. Dalam hal ini yang digunakan adalah penguat non-inverting.
Berikut ini adalah desain dari rangkaian penguat non-inverting : R1 = R2 = R3 = 120 ohm R4 = 119.5 ohm Maka : 𝐸𝑜 = 𝑅3 𝑅3+𝑅1𝑉𝑖𝑛 − 𝑅4 𝑅4+𝑅2𝑉𝑖𝑛 𝐸𝑜 = 120 120 + 1205 − 119.5 119.5 + 1205 𝐸𝑜 = 2.5 − 2.49 Eo = 0.01
Karena Vout op-amp 2 volt, dan Gain diinginkan menjadi 200 (yaitu 2/0.01) maka untuk mencari Rf adalah
Gain = 1 + (Rf/ Rin) 200 = 1 + (Rf/ 100) Rf = 19.900 ohm
Rf maksimal adalah 100Kohm
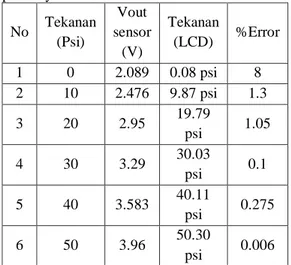
Dibawah ini merupakan hasil dari pengukuran sensor tekanan yang terbaca pada layar LCD No Tekanan (Psi) Vout sensor (V) Tekanan (LCD) %Error 1 0 2.089 0.08 psi 8 2 10 2.476 9.87 psi 1.3 3 20 2.95 19.79 psi 1.05 4 30 3.29 30.03 psi 0.1 5 40 3.583 40.11 psi 0.275 6 50 3.96 50.30 psi 0.006
2.1.4 Perancangan Sensor Level Air
Blok indikator ini terdiri dari 3 LED berwarna putih yang disusun secara vertikal. Ada 3 buah LED yang menunjukkan level air pada tangki penampungan air. Apabila level air pada tangki penampungan air dalam keadaan penuh, maka LED paling atas sendiri akan nyala, apabila air dalam keadaan separuh maka LED kedua akan nyala dan apabila air sedikit atau rendah maka LED ketiga yang akan nyala diiringi bunyi
buzzer. Dari kondisi tersebut maka dapat
disusun menjadi sebuah algoritma
pemrograman dengan mengamati
kombinasi beberapa sensor seperti tampak pada Tabel 3.2 berikut ini.
Tabel 3.2: Algoritma Sensor
Level Air Input Kondisi Hexa 1 2 3 Full ON ON ON 0x38 Medium ON ON OFF 0x30
Low ON OFF OFF 0x20
Empty OFF OFF OFF 0x00
Dalam pengujian level sensor terdapat 2 buah level sensor pada sistem yaitu yang tertera pada panel sistem dan analog yang berada pada reject tank. Level sensor analog pada reject tank ini berfungsi untuk mengetahui seberapa tinggi air yang telah keluar pada tank. Apabila reject tank telah penuh dengan air maka secara otomatis sistem akan mati. Gambar dibawah ini merupakan gambar dari output level sensor yang berada pada reject tank. Sebagai actuatornya adalah potensio yang maksimal terukur pada mikrokontroler adalah 3.6 volt.
Gambar 3.4: Output Level Sensor pada
Panel LV_3 LV_2 LV_1 GND GND Conductor Strip PD.2 PD.3 PD.4
Gambar 3.5: Output Level Sensor Reject
Tank
Kedua sensor level ini langsung
dihubungkan dengan mikrokontroler
sebagai pengendali sistem. 2.2 pH Meter
Perencanaan pH Meter
digunakan untuk mengetahui asam atau basa dari air pengujian. Dalam perencanaan ini, yang digunakan adalah pH meter digital yaitu hasil dari indikator air uji langsung tercantum pada LCD. Spesifikasi dari pH meter yang digunakan adalah sebagai berikut :
Gambar 3.6: pH Meter
Spesifikasi :
Taster Range : 0.0 – 14.0 pH
Akurasi : sampai 0.3 pH
Temperature : 0 – 50ᵒC
Battery Life : DC 4x1.5 volt
2.3 TDS Meter
Dalam perancangan sistem ini, untuk menghasilkan air yang benar-benar tawar maka salah satu sensor pendeteksinya adalah menggunakan sensor TDS (Total
Dissolve Solid). Spesifikasi dari TDS
meter merk HM Digital TDS-3 adalah sebagai berikut :
Gambar 3.7: TDS Meter
Spesifikasi :
TDS Range : 0 – 9990 ppm (mg./l) Temp. Range : 0 – 800ᵒC
Akurasi : sampai dengan 2%
Battery Life : 1000 jam pemakaian
Dimensi : 15.5 x 3.1 x 2.3 cm
Sumber : 2 x 1.5 volt (button cell
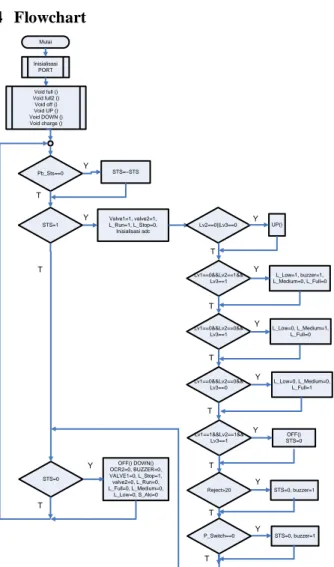
batteries) 2.4 Flowchart 80 Mulai Inisialisasi PORT Pb_Sts==0 STS=1 STS=~STS Valve1=1, valve2=1, L_Run=1, L_Stop=0, Inisialisasi adc Y T Y T Void full () Void full2 () Void off () Void UP () Void DOWN () Void charge () Lv2==0||Lv3==0 Y UP() T Lv1==0&&Lv2==1&& Lv3==1 Y L_Low=1, buzzer=1, L_Medium=0, L_Full=0 T Lv1==0&&Lv2==0&& Lv3==1 L_Low=0, L_Medium=1, L_Full=0 Lv1==0&&Lv2==0&& Lv3==0 L_Low=0, L_Medium=0, L_Full=1 Y Y T T OFF() DOWN() OCR2=0, BUZZER=0, VALVE1=0, L_Stop=1, valve2=0, L_Run=0, L_Full=0, L_Medium=0, L_Low=0, S_Aki=0 STS=0 Lv1==1&&Lv2==1&& Lv3==1 OFF() STS=0 Reject>20 STS=0, buzzer=1 P_Switch==0 STS=0, buzzer=1 Y Y Y T T T Y T
2.5 Pengujian ADC
Pengujian program ini untuk perangkat antarmuka merupakan langkah awal
sebelum pengujian alat secara
keseluruhan. Pada bagian ini yang dilakukan adalah pengujian terhadap ADC mikrokontroler AVR ATMega16
dengan menggunakan output 10
bit.dihubungkan langsung ke sensor
tegangan. Sebagai masukan ADC,
menggunakan Port A karena port ini
mengijinkan untuk masukan analog
dengan batas minimum ground dan maksimum Vreff. ADC yang dipakai adalah 5 pin. Pada ADC menggunakan tegangan referensi 5 volt. Berikut ini merupakan perhitungan dari analog ke digital.
Pada saat tegangan input 1 volt, yang terbaca di ADC adalah 0.0786. V reff dari mikrokontroler adalah 5 volt maka untuk mencari V max adalah 5/0.0786 = 63.6. Jika ingin mengkonversinya ke dalam
desimal maka 210 =1023/ 63 =16.2. Dapat
disimpulkan bahwa 1 volt mewakili 16.2 desimal. Berikut perumusan konversi ke bilangan desimal :
ADC decimal = 102363 x Vin
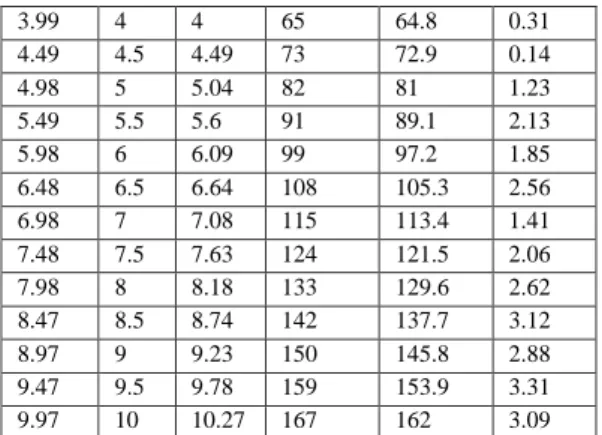
Tujuan pengujian untuk mengaambil data melalui ADC dan ketepatan pembacaan ADC. Pada Tabel 4.1 nilai prosentase error maksimal adalah 13.58% dan rata-rata error adalah 2.79%. Sedangkan untuk keakurasian pada ADC mikrokontroler AVR ATMega16 tidak sempurna sekitar ±2 LSB. Sehingga didapatkan hasil uji ADC seperti pada tabel berikut.
Tabel 4.1: Pengujian ADC
%Error V
analog
Vin Vadc Decimal
adc Decimal teori 0.15 0 0 0 0 0 0.5 0.5 0.43 7 8.1 13.58 0.99 1 0.92 15 16.2 7.41 1.49 1.5 1.48 24 24.3 1.23 1.99 2 1.91 31 32.4 4.32 2.49 2.5 2.4 39 40.5 3.70 2.98 3 2.95 48 48.6 1.23 3.48 3.5 3.51 57 56.7 0.53 3.99 4 4 65 64.8 0.31 4.49 4.5 4.49 73 72.9 0.14 4.98 5 5.04 82 81 1.23 5.49 5.5 5.6 91 89.1 2.13 5.98 6 6.09 99 97.2 1.85 6.48 6.5 6.64 108 105.3 2.56 6.98 7 7.08 115 113.4 1.41 7.48 7.5 7.63 124 121.5 2.06 7.98 8 8.18 133 129.6 2.62 8.47 8.5 8.74 142 137.7 3.12 8.97 9 9.23 150 145.8 2.88 9.47 9.5 9.78 159 153.9 3.31 9.97 10 10.27 167 162 3.09 3. Kesimpulan
Setelah proses pembuatan sistem dan
finishing secara keseluruhan dari pengerjaan proyek akhir yang berjudul ”Otomatisasi Sistem Pengolahan Air Laut Menjadi Air Tawar dengan Prinsip
”Reverse Osmosis” Berbasis Mikrokontroler (Sub Judul: Sensor dan Monitoring Sistem) maka dapat diambil beberapa kesimpulan sebagai berikut : 1. Sistem Filter Reverse Osmosis ini
berfungsi untuk menghasilkan air tawar dengan prosentase kadar garam sebesar 20% – 30% dari TDS air laut dan nilai pH sebesar 6.8 – 7.2.
2. Sistem ini terdiri dari 3 filter sebelum masuk ke filter reverse osmosis yang mempunyai penyaringan dan fungsi yang berbeda pada setiap filternya. 3. Pada pengujian ADC (Analog to
Digital Converter) untuk rangkaian buck converter terdapat error antara
pembacaan tegangan analog dan
tegangan yang terbaca oleh ADC. Hal ini dapat terjadi karena pengaruh dari rangkaian sensor tegangan yang kurang akurat.
4. Pada sistem terdapat level sensor yang berfungsi sebagai parameter ketinggian air. Jika air yang akan diproses tidak memenuhi persyaratan maka akan terjadi umpan balik dari sistem yaitu
buzzer atau jika level air sudah
maksimal pada tempat keluaran maka sistem akan secara otomatis berhenti. 5. Pengerjaan proyek akhir ini dilengkapi
dengan mikrokontroler untuk
agar dapat dikendalikan sesuai dengan kehendak user.
4. DaftarPustaka
[1] Andrianto Heri, “Pemrograman
Mikrokontroler AVR
ATMega16”.2008. Informatika: Bandung
[2] Puspitasari Ratih, “Rancang Bangun
Alat Ukur Resistansi Belitan Transformator Menggunakan Injeksi Arus Berbasis Mikrokontroler (Software)”. 2008. PENS-ITS.
[3] Idaman Said, “Teknologi Reverse
Osmosis”, BAB10.pdf
[4] Malvino, “Prinsip-Prinsip