34
SUSCEPTIBLE - INFECTED – SUSCEPTIBLE Firsty Nur Hidayati1, Sunarsih2, Djuwandi3
1,2,3
Program Studi Matematika F.MIPA Universitas Diponegoro Jl. Prof. H. Soedarto, S.H. Tembalang Semarang
Abstract. A predator-prey model with infected prey is an interaction between a predator and a prey population with infected prey. This model is a result of the predator-prey model with logistic growth in the prey population which is combined with Susceptible-Infected-Susceptible (SIS) model in the prey. The equations in this model are non linear differential equation with three dependent variables. In this system, H(t) is size of prey population at time t, I(t) is the fraction of the prey that are infectious at time t and P(t) is size of predator population at time t. It is assumed that infected prey are vulnerable than by a factor q≥1. Stability analysis system is done to all five equilibria in this linearized. Each of stability in those equilibria points is based on the eigen values.
Keywords: stability, SIS model, eigen value, equilibrium point
1. PENDAHULUAN
Interaksi populasi yang paling kelihatan adalah yang melibatkan pemangsaan (predasi, predation), dimana seekor pemangsa (predator) memakan mangsa (prey) [3]. Pemangsaan atau predasi diartikan sebagai pemanfaatan individu untuk memenuhi kebutuhan makanan bagi individu lain. Penggunaan satu individu oleh individu lain untuk makanan mempunyai pengaruh negatif pada pertumbuhan potensial populasi prey, dimana makanan biasanya diartikan dalam pengaruh yang positif pada pertumbuhan populasi predator [2]. Pada interaksi dua populasi tersebut, keberadaan populasi
prey yang terinfeksi dapat berpengaruh pada pemangsaan oleh predator yaitu prey yang terinfeksi akan lebih lemah sehingga lebih mudah diserang untuk dimangsa oleh
predator.
Model yang mendeskripsikan interaksi dua populasi yaitu predator dan
prey dengan prey yang terinfeksi adalah
model predator dan prey dengan prey yang terinfeksi. Dari model tersebut akan dicari solusi kesetimbangan dan dianalisis perilaku dari sistem yang dapat ditentukan dengan menganalisis kestabilan dari solusi kesetimbangan tersebut.
2. MODEL PREDATOR DAN PREY DENGAN PREY YANG TERIFEKSI
Model predator dan prey dengan
prey yang terinfeksi diperoleh dari model predator dan prey dengan pertumbuhan
logistik pada populasi prey yang dikombinasikan dengan model
Susceptible-Infected-Susceptible (SIS)
pada prey. Diasumsikan bahwa prey yang terinfeksi lebih mudah diserang untuk dimangsa oleh predator yang dinyatakan dengan q yang bernilai lebih besar atau sama dengan 1. Model predator dan prey dengan prey yang terinfeksi dinyatakan dengan sistem persamaan sebagai berikut [1].
(
X qY)
P a H K H r dt dH + − − = 1 aXP Y H XY X K H r d H K H r b dt dX − + − − + − − = θ (1 θ) β γ aqYP Y K H r d Y H XY dt dY − − + − − =β γ (1 θ)(
X qY)
P cP ka dt dP= + − dengan Y X H = + , H Y I = dan I H X S= =1− (2.1.a) (2.1.b) (2.1.c) (2.1.d)35 diperoleh sistem persamaan sebagai
berikut
( )
(
q I)
P H a K H r dt dH − + − − = 1 1 1( )
a( )( )
q I P I K H r b I dt dI − − − − + − − = β1 γ θ 11(
)
(
)
[
kaH q I c]
P dt dP= + − − 1 1Ada lima solusi kesetimbangan model
predator dan prey dengan prey yang
terinfeksi yaitu E0 =(0,0,0),E1=
(
K,0,0)
, = 2 E − kaK c a r ka c 1 , 0 , , = 3 E + − ,0 1 , 0β
γ
b dan = 4 E + − − ,0 1 ,β
θ
γ
b r K .3. ANALISIS KESTABILAN SISTEM
PERSAMAAN YANG
DILINIERKAN
Persamaan (2.2.a), (2.2.b), dan (2.2.c) adalah sistem persamaan differensial non linier, untuk menganalisis kestabilan dari titik kesetimbangannya, terlebih dahulu dilakukan pelinieran terhadap persamaan (2.2.a), (2.2.b), dan (2.2.c) dan kemudian persamaan dimisalkan dengan sistem persamaan sebagai berikut:
2
( , , )
dH H
rH r aPH aqIPH aIPH
dt K U H I P = − − − + = 2 2 2 ( , , ) dI I I I bI dt H
r I aqPI aqI P aPI aI P
K V H I P β β γ θ = − − − + − + + − = ( , , ) dP
kaHP kaHqIP kaHIP cP dt W H I P = + − − = Kemudian, didefinisikan O1 =H−H*, * 2 I I O = − dan O3 =P−P* dengan H*, *
I dan P* merupakan suatu konstanta, maka dt dH dt dO = 1 , dt dI dt dO = 2 dan dt dP dt dO = 3
. Dengan demikian linierisasi dari persamaan (2.2.a), (2.2.b) dan (2.2.c) dengan menggunakan deret Taylor di titik
) , ,
(H* I* P* adalah sebagai berikut :
(
)
* * * 1 1 * * 2 2 1 1 ( 1) ( 1) dO H r aP q I O dt K aH P q O = − − + − + − − [
]
3 * * ) ) 1 ( 1 ( q I O aH + − − +(
)(
)
* 2 1 * * * 2 ( 1) 1 2 dO I r O dt K H aP q I b r O K θ β γ θ = + − − − − + − [
]
3 * * ) 1 )( 1 (q I O aI − − − + * * 3 1 * * 2 * * 3 (1 ( 1) ) ( 1) (1 ( 1) ) dO kaP q I O dt kaH P q O kaH q I c O = + − + − + + − − Dari linierisasi di atas, diperoleh matriks Jacobian pada titik kesetimbangan
(
* * *)
, ,I P H yaitu:(
)
− − + − − + − − − − + − − − = c I q kaH q P kaH I q kaP I q aI a K I r I q aH q P aH a P I H J ) ) 1 ( 1 ( ) 1 ( ) ) 1 ( 1 ( ) 1 )( 1 ( ) ) 1 ( 1 ( ) 1 ( , , * * * * * * * * 22 * * * * * 11 * * * θ dengan:(
*)
* * 11 1 ( 1) 2 1 aP q I K H r a − + − − =(
)(
)
− + − − − − = K H r b I q aP a * * * 22 β ( 1) 1 2 γ θDianalisis perilaku kestabilan dari persamaan (2.2.a), (2.2.b), dan (2.2.c) dengan cara mensubstitusi nilai dari (2.2.a) (2.2.b) (2.2.c) (2.3.a) (2.3.b) (2.3.c) (2.4.a) (2.4.b) (2.4.c)
36
masing-masing titik kesetimbangan ke dalam persamaan (2.4.a), (2.4.b) dan (2.4.c) sebagai berikut.
a) Titik 1: E0 =(0,0,0)
Dengan mensubstitusikan titik ) 0 , 0 , 0 ( 0 =
E ke dalam persamaan (2.4.a), (2.4.b) dan (2.4.c), diperoleh sistem yang dilinierkan sebagai berikut.
1 1 rO dt dO =
(
)
2 2 b O dt dO − − =β
γ
3 3 cO dt dO − =Nilai eigen dari persamaan (2.5.a), (2.5.b) dan (2.5.c) adalah
λ
1 =r,λ
2 =β
−γ
−b, danλ
3 =−c. Dengan demikian, titik) 0 , 0 , 0 ( 0 =
E tidak stabil karena
λ
1 =r>0. Grafik O1(t), O2(t) dan O3(t) dengan0
1 >
λ , λ2 <0 dan
λ
3 <0 (λ2 > λ3)digambarkan sebagai berikut.
Gambar 1. Grafik O1(t), O2(t) dan O3(t) untukE0 = (0,0,0) dengan λ1 >0, λ2 <0 dan
0
3 <
λ
(λ2 >λ3).Dari Gambar 1. dapat dilihat bahwa populasi prey meningkat sampai pada jumlah yang tidak terbatas. Sedangkan populasi predator dan populasi prey yang menular per total populasi prey semakin berkurang.
b) Titik 2: E1 =(K,0,0)
Dengan mensubstitusikan titik ) 0 , 0 , ( 1 K
E = ke dalam persamaan (2.4.a), (2.4.b) dan (2.4.c), diperoleh sistem yang dilinierkan sebagai berikut.
3 1 1 rO aKO dt dO − − = 2 2 ( b r)O dt dO
θ
γ
β
− − + = 3 3 (kaK c)O dt dO − =Nilai eigen dari persamaan (2.6.a), (2.6.b) dan (2.6.c) adalah
λ
1 =−r, r bθ
γ
β
λ
2 = − − + ,danλ
3 =kaK−c.Dengan demikian, titik E1 =(K,0,0) stabil jika
λ
2 danλ
3 yang bernilai riil non positif. Grafik O1(t), O2(t) dan O3(t)dengan λ1 <0, λ2 <0 dan
λ
3 <0 ( 3 2 1 λ λ λ > > ) digambarkan sebagai berikut.Gambar 2. Grafik O1(t), O2(t) dan O3(t) untuk E1 =(K,0,0) dengan λ1 <0,
0
2 <
λ dan
λ
3 <0 (λ1 >λ2 >λ3)Dari Gambar 2. dapat dilihat bahwa populasi prey, populasi prey yang menular per total populasi prey dan populasi
predator semakin berkurang.
c) Titik 3: − = kaK c a r ka c E2 ,0, 1
Dengan mensubstitusikan titik − = kaK c a r ka c E2 ,0, 1 ke dalam persamaan (2.4.a), (2.4.b) dan (2.4.c), diperoleh sistem yang dilinierkan sebagai berikut. (2.5.a) (2.5.b) (2.5.c) (2.6.a) (2.6.b) (2.6.c)
37 1 1 2 3 1 ( 1) dO rc O dt kaK cr c c q O O ka kaK k = − + − − − − 2 2 ( 1) 1 dO c c r q b r O dt β kaK γ θ kaK = − − − − + − 2 1 3 ) 1 ( 1 1 q O kaK c a cr O kaK c kr dt dO − − + − =
Nilai eigen dari persamaan (2.7.a), (2.7.b) dan (2.7.c) adalah:
( )
− + − − − − = kaK c r b kaK c q r γ θ β λ1 1 1 dan 2 4 2 2 2 2 2 2 3 , 2 − − ± − = kaK rc rc K a k c r kaK rc λ − − ± − = kaK c rc K a k c r kaK rc 1 4 2 1 2 1 2 2 2 2 2 .Dengan demikian, titik
− = kaK c a r ka c E2 ,0, 1 stabil jika >1 c kaK dan
( )
− + − − − − = kaK c r b kaK c q r γ θ β λ1 1 1bernilai riil non positif.
d) Titik 4: E3 = + − ,0 1 , 0
β
γ
bDengan mensubstitusikan titik
= 3 E + − ,0 1 , 0
β
γ
b ke dalam persamaan (2.4.a), (2.4.b) dan (2.4.c), diperoleh sistem yang dilinierkan sebagai berikut 1 1 rO dt dO =(
)
2 1 2 1 1 O b O b K r dt dO + + − + + − = β γ β γ θ 3 ) 1 ( 1 b q b O a + − + − − + β γ β γ 3 3 cO dt dO − =Nilai eigen dari persamaan (2.9.a), (2.9.b) dan (2.9.c) adalah
λ
1 =r,λ
2 =−β
+γ
+b, danλ
3 =−c. Dengan demikian, titik E3 = + − ,0 1 , 0
β
γ
btidak stabil karena
0
1 =r>
λ
. Grafik O1(t), O2(t) dan O3(t)dengan 0<θ ≤1, q>1,
λ
1 >0,λ
2 <0dan
λ
3 <0 (λ
2 <λ
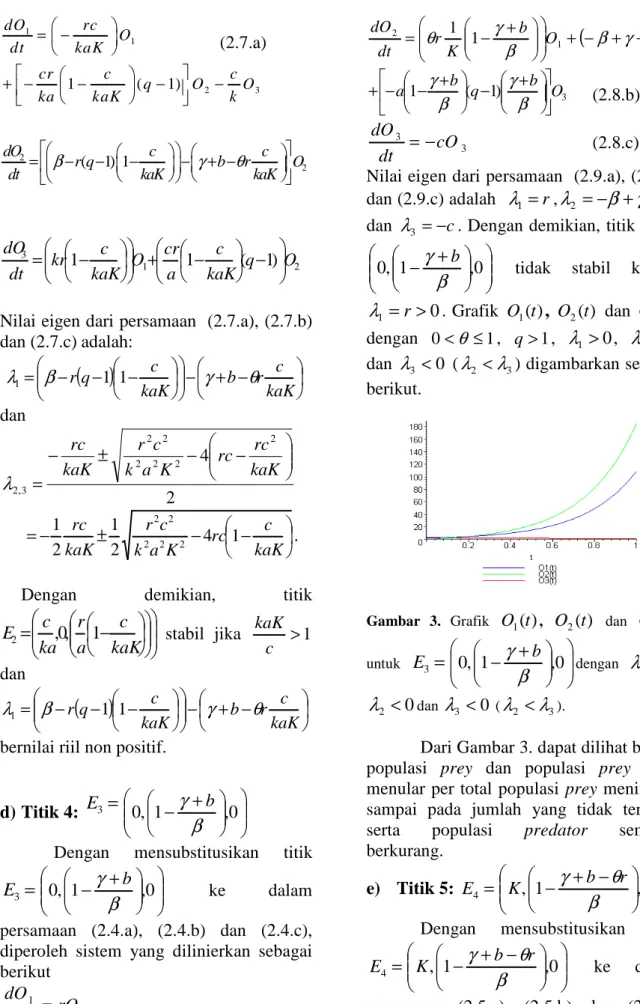
3) digambarkan sebagai berikut.Gambar 3. Grafik O1(t), O2(t) dan O3(t)
untuk E3 = + − ,0 1 , 0
β
γ
b denganλ
1 >0, 0 2 <λ
danλ
3 <0 (λ
2 <λ
3).Dari Gambar 3. dapat dilihat bahwa populasi prey dan populasi prey yang menular per total populasi prey meningkat sampai pada jumlah yang tidak terbatas serta populasi predator semakin berkurang. e) Titik 5: E4 = + − − ,0 1 ,
β
θ
γ
b r KDengan mensubstitusikan titik
= 4 E + − − ,0 1 ,
β
θ
γ
b r K ke dalampersamaan (2.5.a), (2.5.b) dan (2.5.c), (2.7.a)
(2.8.a)
(2.8.b) (2.8.c)
38
diperoleh sistem yang dilinierkan sebagai berikut. 1 1 3 1 ( 1) 1 dO rO dt b r aK q
γ
θ
Oβ
= − + − + − + − − (
)
2 1 2 1 1 dO b r r O dt K b r Oγ
θ
θ
β
β γ
θ
+ − = − + − + + − 3 ) 1 ( 1 b r q b r O a + − − + − − − +β
θ
γ
β
θ
γ
3 3 kaK 1 (q 1) 1 b r c O dt dO − + − − − + =β
θ
γ
Nilai eigen dari persamaan (2.9.a), (2.9.b) dan (2.9.c) adalah
λ
1 =−r, r bθ
γ
β
λ
2 =− + + − , dan c r b q kaK − + − − − + =β
θ
γ
λ
3 1 ( 1) 1 .Dengan demikian, titik E4 = + − − ,0 1 ,
β
θ
γ
b r K stabil jika 1 > − +bθ
rγ
β
dan c r b q kaK − + − − − + =β
θ
γ
λ
3 1 ( 1) 1bernilai riil non positif. Grafik O1(t),
) ( 2 t O dan O3(t) dengan 0<θ ≤1, q>1, 0 1 <
λ
,λ
2 <0, danλ
3 <0 (λ1 >λ2 >λ3)digambarkan sebagai berikut.
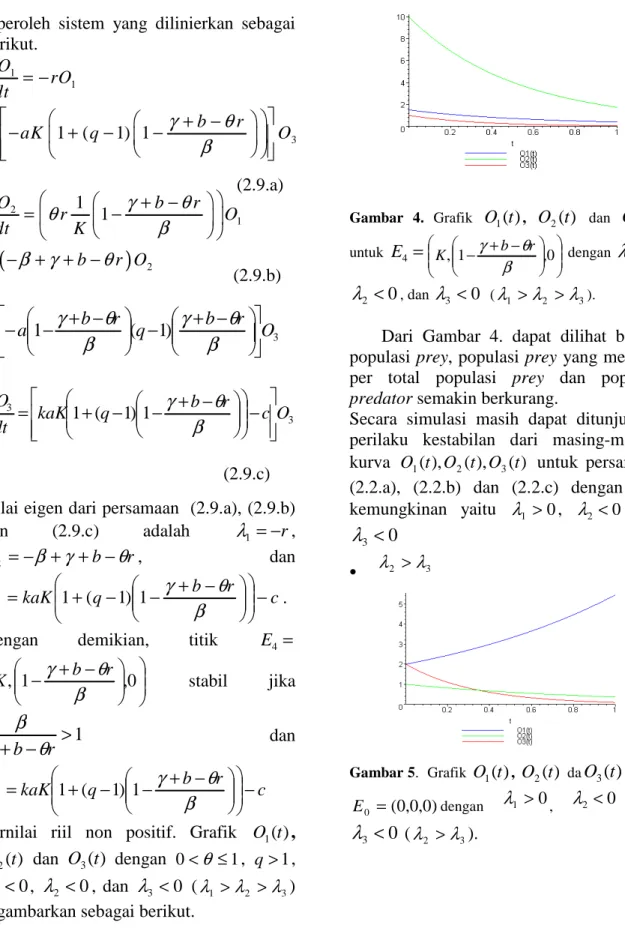
Gambar 4. Grafik O1(t), O2(t) dan O3(t)
untuk E4 = + − − ,0 1 , β θ γ b r K dengan
λ
1 <0 0 2 <λ
, danλ
3 <0 (λ1 >λ2 >λ3).Dari Gambar 4. dapat dilihat bahwa populasi prey, populasi prey yang menular per total populasi prey dan populasi
predator semakin berkurang.
Secara simulasi masih dapat ditunjukkan perilaku kestabilan dari masing-masing kurva O1(t),O2(t),O3(t) untuk persamaan (2.2.a), (2.2.b) dan (2.2.c) dengan tiga kemungkinan yaitu λ1 >0, λ2 <0 dan
0
3 <
λ
• λ2 >λ3
Gambar 5. Grafik O1(t), O2(t) daO3(t) untuk ) 0 , 0 , 0 ( 0 = E dengan λ1 >0, λ2 <0 dan 0 3 <
λ
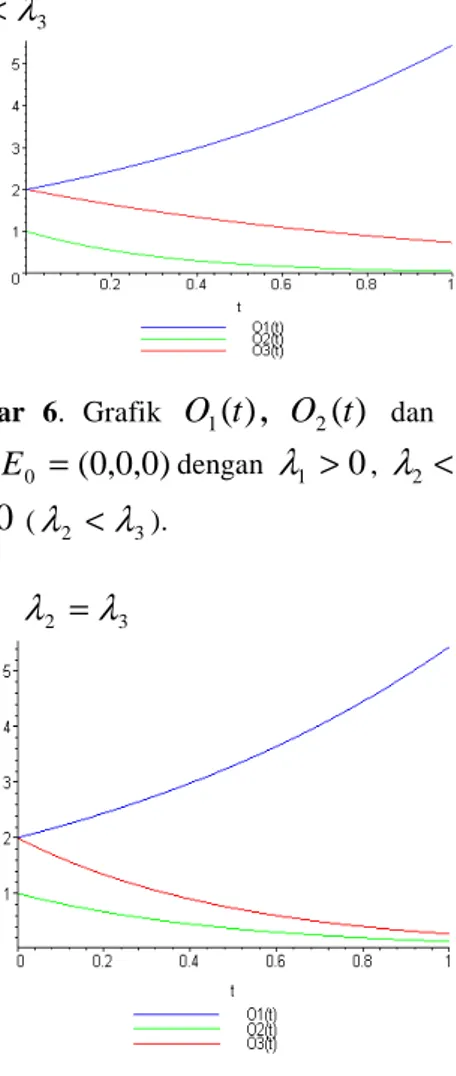
(λ2 >λ3). (2.9.a) (2.9.b) (2.9.c)39 •λ2 <λ3
Gambar 6. Grafik O1(t), O2(t) dan O3(t)
untuk E0 =(0,0,0)dengan λ1 >0, λ2 <0 dan
0
3 <
λ
(λ2 <λ3).• λ2 =λ3
Gambar 7. Grafik O1(t), O2(t) dan O3(t)
untuk E0 = (0,0,0)dengan λ1 >0, λ2 <0 dan
0
3 <
λ
(λ2 =λ3).Dari Gambar 5, 6, dan 7. dapat dilihat bahwa populasi prey meningkat sampai pada jumlah yang tidak terbatas. Sedangkan populasi predator dan populasi
prey yang menular per total populasi prey
semakin berkurang.
4. PENUTUP
Model predator dan prey dengan
prey yang terinfeksi merupakan sistem
persamaan differensial non linier yang mempunyai tiga variabel tidak bebas yaitu
) (t
H yang menyatakan jumlah populasi
prey pada waktu
t
, I(t) yang menyatakan jumlah populasi prey yang menular per total populasi prey pada waktut
dan P(t)yang menyatakan jumlah populasi
predator pada waktu
t
. Dari sistemtersebut dicari solusi kesetimbangan sehingga diperoleh lima titik kesetimbangan dan pada tiap-tiap titik kesetimbangan tersebut dilakukan analisis kestabilan pada sistem yang dilinerkan yang berdasar pada nilai-nilai eigennya.
5. DAFTAR PUSTAKA
[1]. Hethcote, H. W, Wendy Wang, Litao Han, and Zhien Ma, (2004), A
Predator-Prey Model with Infected
Prey. Journal of Theoretical
Population Biology. 66 (September
13): 259-268.
http://www.elseiver.com/locate/ytpbi. (accessed November 12, 2009).
[2]. McNaughton, S. J and Larry L Wolf, (1990), Ekologi Umum. Yogyakarta: Gajah Mada University Press.
[3]. Neil, A. C, Jane B Reece, and Lawrence G Mitchel, (2004), Biologi
edisi kelima jilid 3. Jakarta: Penerbit