217
Implementasi
Kontrol PI Pada Pengaturan Kecepatan
Motor DC
Mila Fauziyah*
a), Denda Dewatama
a), Marsa Atisobhita
a)Abstrak: Motor DC merupakan mesin listrik yang mengkonversi energi listrik menjadi energi mekanik. Motor DC sampai saat ini banyak digunakan untuk pabrik dan industri. Agar penggunaan motor DC semakin banyak dan berkembang maka diperlukan kontrol agar kecepatan putar motor stabil dan sesuai dengan yang diinginkan. Salah satu kontrol yang dapat digunakan adalah kontrol PI, dimana kontrol P dan kontrol I didalam kontrol PI saling melengkapi yaitu kontrol I yang dapat mengeliminasi offset yang diakibatkan oleh kontrol P dan kontrol I yang lambat dapat ditutupi oleh kontrol P. Dengan menggunakan nilai Kp=0,18 dan Ki=0,109 dan
setpoint 40 RPM didapatkan respon dari motor DC yang cukup baik yaitu td (waktu tunda) sebesar 0 detik, tr
(waktu naik) sebesar 11,5 detik, ts (settling time) sebesar 19 detik, tp (waktu puncak) sebesar 2 detik, Mo
(Overshoot maksimum) sebesar 46 rpm dan ess (error stady state) sebesar 0%.
Kata Kunci – Motor DC, Kontrol PI
I. PENDAHULUAN
Motor DC adalah suatu mesin listrik yang berguna sebagai motor listrik jika terjadi proses konversi dari energi listrik menjadi energi mekanik didalamnya [1]. Motor DC merupakan motor yang membutuhkan suplai tegangan searah pada kumparan jangkar dan kumparan medan yang kemudian akan diubah menjadi energi mekanik [1]. Motor DC banyak digunakan sebelum motor AC dikenal yaitu untuk menghasilkan tenaga mekanik pada mesin-mesin industri dipabrik, dan lain sebagainya. Sampai saat ini, motor DC banyak dipakai pada pabrik dan industri [2]. Agar penggunaan motor DC semakin banyak dan semakin berkembang maka diperlukan kontrol agar kecepatan putar motor stabil dan sesuai dengan kecepatan putar yang diinginkan [3]. Salah satu kontrol yang dapat digunakan untuk mengontrol kecepatan putar motor DC dalah kontrol PI. Kontrol PI merupakan gabungan antara kontrol P (Proportional) dan kontrol I (Integral). Kontrol P (Proportional) akan selalu menghasilkan offset sedangkan kontrol I (Integral) atau yang bisa juga disebut dengan pengendali reset berfungsi untuk mengeliminasi
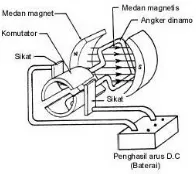
offset yang diakibatkan oleh kontrol P (Proportional). Sedangkan kontrol integral yang lambat dapat ditutupi oleh pengendali proportional [1]. disebut rotor. Kemudian bagian yang tidak berputar atau disebut dengan kutub medan atau statot, dan yang terakhir adalah komutato.[5]
Gambar 1. Motor DC Sederhana
2.2 Karakteristik Motor DC
Gambar 2. Hubungan Antara Daya Dengan Torsi/Kecepatan [1]
Dari gambar 2 dapat dilihat karakteristik dari motor yaitu diantaranya :
Pada kondisi stall torque, yaitu menunjukkan bahwa kondisi motor pada saat torsi maksimum, akan tetapi motor dalam kondisi yang tidak berputar,
Pada saat no load speed, yaitu motor pada kondisi kecepatan maksimum, akan tetapi tidak ada beban pada motor. [1]
2.3 Sensor Kecepatan
Sensor kecepatan yang digunakan adalah
incremental rotary encoder. Keluaran dari
incremental rotary encoder adalah format digital.
* Korespondensi: [email protected]
218
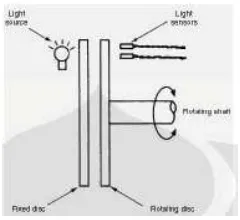
Sebuah Incremental rotary encoder terdiri dari LED yang digunakan sebagai sumber cahaya, disc encoder (rotating disc) atau disc yang berputar, fixed disc, photo-detector. LED dan photo detector
diletakkan secara sejajar sehingga cahaya dari LED akan mengenai photo detector pada saat disc
berputar. Cahaya dari LED tidak selalu mengenai
photo detector, tetapi hanya akan mengenai photo detector jika cahaya melewati slot-slot pada disc encoder [6]
Gambar 3. Susunan Incremental Rotary Encoder [6]
2.4 Sensor Arus
Sensor arus ACS712 adalah sensor untuk mengukur arus AC atau DC dalam pembacaan arus di industri, otomotif, komersil dan sistem-sistem komunikasi [7].
Gambar 4 Sensor Arus ACS712
2.5 Metode PI
Kontrol PI (Proportional Integral) adalah sistem kontrol atau pengendali gabungan antara kontrol proportional dan integral [8]. Kontrol PI berfungsi agar reaksi dari sebuah sistem lebih cepat dan menghilangkan offset [9].
2.5.1Metode Osilasi Ziegler-Nichols
Metode Osilasi Ziegler-Nichols, pertama-tama Td diatur dengan nilai nol dan Ti diatur dengan nilai tak terhingga. Selanjutnya Kp dinaikkan sampai nilai kritis Kcr tercapai dan mengakibatkan reaksi sistem akan berosilasi berkesinambungan [10].
Gambar 5. Osilasi Berkesinambungan Dengan Periode Pcr [10]
Tabel 1Aturan Dasar Ziegler-Nichols Berdasarkan Kcr dan Pcr [10]
setpoint kecepatan dimasukkan dengan
menggunakan keypad dan ditampilkan di LCD. Kemudian motor akan aktif dan berputar. Besar kecepatan putar motor akan dibaca oleh sensor kecepatan yang selanjutnya pembacaan dari sensor kecepatan akan diolah oleh mikrokontroler untuk melihat selisih (error) dari nilai setpoint dan pembacaan oleh sensor kecepatan. Besar kecepatan putar motor yang dicapai pada saat itu juga akan ditampilkam pada LCD. Selanjutnya kontrol PI akan bertugas untuk mengontrol dan menstabilkan kecepatan motor agar sesuai dengan setpoint
berdasarkan error yang didapat. Selama motor berputar, sensor arus akan membaca besar arus motor DC.
3.2 Perancangan Elektronik 3.2.1 Perancangan Sensor Kecepatan
Sensor yang digunakan adalah Incremental rotary encoder. Sensor kecepatan digunakan untuk membaca kecepatan putar motor. Keluaran dari
Incremental rotary encoder berupa pulsa yang kemudian akan dijadikan input untuk mikrokontroler kaki PD3 seperti terlihat dalam Gambar 6 di bawah ini.
Gambar 6. Perancangan Sensor Kecepatan
Resolusi pada Incremental rotary encoder yang digunakan adalah 360 P/R yaitu dalam satu kali putaran Incremental rotary encoder menghasilkan 360 pulsa. Waktu pencuplikan yang diapakai adalah 100ms, sehingga kecepatan putar motor dapat diketahui dengan persamaan dibawah ini.
Rpm = ………. (1) Keterangan :
219
x = jumlah pulsa rotary encoder (datasheet) T = waktu pencuplikan (ms)
3.2.2 Perancangan Sensor Arus
Gambar 7. Perancangan Sensor Arus
Sensor arus yang digunakan adalah modul sensor arus ASC712. Sensor arus digunakan untuk membaca besar arus pada motor. Digunakan modul sensor arus ACS712 yang 20 Ampere karena arus motor lebih dari 5 Ampere. Sensor ACS712 tidak menggunakan pengkondisi sinyal karena sensitivitas sensor arus lebih besar (100mV) jika dibandingkan step size ADC (4,88 mV). Nilai step size dapat dihitung dengan menggunakan persamaan dibawah ini.
Step size = ………. (2)
3.2.3 Perancangan Driver Motor
Driver motor digunakan untuk menggerakan motor DC. Driver motor berfungsi sebagai penguat karena tegangan dan arus keluaran mikrokontroler tidak dapat memenuhi kebutuhan motor. Rangkaian ini menggunakan transistor BD139 yang digunakan untuk memicu mosfet. Mosfet yang digunakan pada rangkaian ini adalah mosfet dengan tipe IRF3205. Mosfet digunakan sebagai saklar. Rangkaian driver motor DC dapat dilihat dalam Gambar 8 di bawah.
Gambar 8. Driver Motor DC
3.3 Perancangan PI
3.3.1 Perancangan Kontrol PI Ziegler-Nichols
Gambar 9. Respon Osilasi Motor DC
Gambar 9 diatas merupakan respon osilasi motor DC yang diperoleh dari metode osilasi
Ziegler-nichols. Nilai Kcr yang didapat sebesar 1,04 dan nilai Pcr sebesar 3,3. Jarak antar gelombang sebesar 33 dan waktu pencuplikan 100ms, maka nilai Pcr sebesar 3,3 dapat dihitung:
Pcr = 83 – 50 berdasarnya rumus metode osilasi Ziegler-nichols
yang terdapat pada tabel 2.1. Kp = 0,45 x Kcr
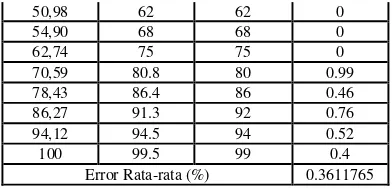
4.1 Pengujian Rangkaian Sensor Kecepatan Pada pengujian ini dilakukan dengan mengatur besar duty cycle dari program yang selanjutnya melihat besar kecepatan motor pada LCD dan yang terbaca pada tachometer.
220
Error Rata-rata (%) 0.3611765
4.2 Pengujian Driver Motor
Pengujian driver motor dilakukan dengan cara mengatur duty cycle dari program yang selanjutnya mengukur tegangan keluaran motor.
Tabel 3. Tabel Hasil Pengujian Driver Motor Duty Cycle
4.3 Pengujian Kontrol PI (Proportional Integral) Pengujian kontrol PI (Proportional Integral) dilakukan untuk mengetahui bagaimana respon motor jika diberi kontrol Kp dan Ki. Nilai Kp dan Ki yang didapat dari perhitungan metode osilasi
Ziegler-nichols sebesar 0,468 dan 0,17 dan didapatkan hasil sebagai berikut :
Nilai Kp= 0,468 dan Ki=0,17
Gambar 10. Grafik Respon Dengan Nilai Kp = 0,468 dan Ki = Sebesar 0,17 sistem masih tidak bagus sehingga dilakukan fine tunning untuk mendapatkan respon sistem yang lebih baik dan didapatkan nilai Kp sebesar 0,18 dan Ki sebesar 0,109.
Gambar 4.3 Grafik Respon Sistem Dengan Kontrol PI Pada Setpoint 40 RPM
221
yang cukup baik yaitu dengan td (waktu tunda) sebesar 0 detik, tr (waktu naik) sebesar 11,5 detik, ts
(settling time) sebesar 19 detik, tp (waktu puncak) sebesar 2 detik, Mo (Overshoot maksimum) sebesar 42 rpm dan ess (error stady state) sebesar 0%.
5.2 Saran
Berdasarkan dari dari perancangan, pengujian dan analisa alat yang sudah dilakukan maka saran yang dapat diberikan untuk pengembangan penelitian selanjutnya adalah dapat menggunakan jenis kontrol lain untuk mendapatkan respon sistem yang lebih baik lagi.
DAFTAR PUSTAKA
[1] Sari, Ranti Permata. 2010. Penalaan Parameter Kontrol PID
Dengan Metode Heuristic, Aplikasi : Sistem
Pengendalian Kecepatan Motor DC. Jurnal Jurusan
Teknik Fisika. Institut Teknologi Sepuluh Nopember. [2] Rifa’i, Muhammad. 2012. Modul Ajar Mesin-Mesin Listrik.
Malang: Politeknik Negeri Malang
[3] Odinanto, Tjahja, dkk. 2015. Perancangan Pengendali Kecepatan Motor Arus Searah 1 HP 220 Volt Dengan
Metode PI Berbasis Mikrokontroler. Jurnal IPTEK Vol
Vol 19 No.1 Mei 2015.Jurusan Teknik Elektro-ITATS [4] Nugroho, Nalaprana & Agustina, Sri. 2015. Analisa Motor
DC (Direct Current) Sebagai Penggerak Mobil Listrik.
Jurnal Mikrotiga, Vol 2, No.1 Januari 2015. Universitas Brawijaya
[5] Hamdani, Mohammad. 2010. Pengendalian Kecepatan Motor DC Terhadap Perubahan Temperatur Dengan Sistem
Modulasi Lebar Pulsa. Skripsi Teknik Elektro
Universitas Indonesia.
[6] Kosasih, Herman. 2008. Pengukuran Kecepatan Putar
Berbasis Real Time Linux. Skripsi Departemen Teknik
Elektro. Universitas Indonesia.
[7] Abdillah, Sofyan Hanif. 2014. Pengaturan Tegangan Output Photovoltalk Untuk Pengisian Aki Menggunakan Metode Perturb dan Observe. Skripsi Jurusan TEknik Elektro. Politeknik Negeri Malang
[8] Darjat, dkk. 2008. Aplikasi Kontrol Proportional Inetegral
Berbasis Mikrokontroler ATMega8535 Untuk
Pengaturan Suhu Pada Alat Pengering Kertas.
Proceeding, Seminar Ilmiah Nasional Komputer dan Sistem Inteligen (KOMMIT 2008). Universitas Diponegoro.
[9] Putranto. 2016. Implementasi Metode PI (Proportional Integral) Pada Pengaturan Kecepatan Crusher Motor
Dalam Proses Ekstraksi Buah Apel. Skripsi Teknik
Elketro Politeknik Negeri Malang.