KATA PENGANTAR
Dengan mengucapkan piji dan syukur kehadirat Allah SWT atas segala rahmat dan karuniaNYA. Sehingga penyususn dapat menyelesaikan laporan yang berjudul LAPORAN PRAKTIKUM MOTOR DC. Sholawat serta salam semoga tetap tercurah limpahkan kepada Nabi Muhammad SAW. Adapun penyusunan laporan praktikum ini dalam rangka untuk memenuhi tugas mata kuliah Praktikum Motor DC.
Dalam penyusunan laporan ini tidak lepas dari bantuan banyak pihak, maka dari itu penyusun ingin mengucapkan terima kasih kepada:
1. Asisten Praktikum Motor DC yang telah membimbing dalam melaksanakan Praktikum Motor DC.
2. Semua pihak yang telah membantu hingga selesainya penyusunan laporan ini.
Penyusun menyadari bahwa laporan ini masih jauh dari sempurna. Untuk itu penyusun mohon maaf bila dalam laporan ini masih banyak kekurangannya. Saran dan kritik yang membangun sangat penyusun harapkan demi kesempurnaan laporan ini.
Jakarta, 7 Oktober 2015
Reza Risdiyanto
BAB I
PENDAHULUAN
.1 Latar belakang
Motor DC merupakan aktuator yang sangat lazim digunakan. Ada berbagai macam alasan mengapa motor DC sangat populer digunakan. Salah satunya adalah sistem tenaga listrik DC masih umum digunakan pada industri, automobil dan robotika. Dan meskipun tidak ada sumber tenaga listrik DC, rangkaian penyearah dan chopper
dapat digunakan untuk menghasilkan sumber listrik DC yang diinginkan. Motor DC juga digunakan karena kebutuhan akan variasi kecepatan motor yang lebar.
Dalam dunia industri, pengendalian posisi dan kecepatan motor DC sangat penting. Misalnya pada industri plastik. Pada proses penggulungan plastik, kecepatan penggulungan plastik harus disesuaikan dengan kecepatan mesin pengirim plastik dan juga disesuaikan dengan jari-jari gulungan. Jika tidak maka hasil gulungan plastik tidak rapi atau kusut. Pada robotika pengendalian posisi dan kecepatan motor DC juga sangat penting misalnya dalam Kontes Robot Indonesia (KRI) dan Kontes Robot Cerdas Indonesia (KRCI). Robot harus dapat bergerak cepat dan tepat, meskipun terdapat berbagai halangan ataupun gangguan. Karena itu pergerakan robot memerlukan pengaturan posisi dan kecepatan motor yang baik agar tujuan yang diinginkan dapat tercapai. Karena itulah kendali PID diperlukan disini yaitu untuk mengendalikan posisi dan kecepatan motor DC. Pengendali PID merupakan pengendali yang umum digunakan dalam berbagai macam proses industri. Popularitas pengendali PID disebabkan khususnya karena performansinya yang baik dalam jangkauan yang lebar dari berbagai kondisi operasi dan khususnya dalam kesederhanaan fungsi PID, yang memungkinkan
engineer untuk mengoperasikannya secara simpel dan langsung. Untuk mengimplementasikan pengendali PID, tiga parameter harus ditentukan pada proses yang dikendalikan yang meliputi proportional gain, integral gain, dan derivative gain.
2 .2 Maksud dan tujuan
1. Mengetahui apa yang dimaksud dengan motor DC. 2. Mengetahui prinsip daaan cara kerja motor listrik DC. 3. Mengetahui jenis-jenis motor listrik DC.
4. Mengetahui aplikasi dari motor listrik DC.
5. Mengetahui rumus dan contoh cara perhitungan motor listrik DC.
.3 Sistematika penulisan 1. BAB I PENDAHULUAN
Bab ini terdiri atas latar belakang, maksud dan tujuan praktikum, dan sistematika penulisan yang dilakukan.
2. BAB II TEORI DASAR
Bab ini menjelaskan teori yang diambil dari modul mesin dan juga dari internet, yaitu dengan materi sebagai berikut :
2.1 Pengertian motor DC
2.2 Struktur dan cara kerja motor DC 2.3 Komponen utama motor DC 2.4 Jenis – jenis motor DC
2.5 Bagian – bagian motor dan fungsinya 2.6 Kelebihan dan kekurangan motor DC 2.7 Aplikasi motor DC
2.8 Prinsip kerja motor DC 2.9 Perhitungan pada motor DC 2.10 Mengatur kecepatan dengan field
2.11 Pengereman regeneratif 2.12 Pengereman secara plugging 2.13 Prinsip arah putaran motor 3. BAB III JURNAL PRAKTIKUM
Bab ini ditulis ulang dari laporan praktikum motor DC yang berisikan alat dan bahan, maksud dan tujuan, langkah kerja, grafik dan kesimpulan.
4. BAB IV PEMBAHASAN SOAL
Bab ini berisikan pertanyaan dan jawaban yang berkaitan dengan motor DC. 5. BAB V KESIMPULAN
BAB II
LANDASAN TEORI
.1 Pengertian motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
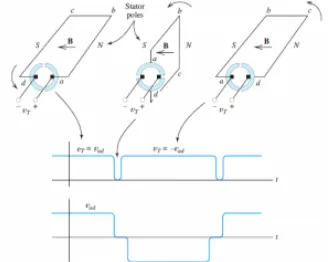
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator ( bagian yang tidak berputar ) dan kumparan jangkar disebut rotor ( bagian yang berputar ). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan ( GGL ) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
.2 Struktur dan cara kerja motor DC
2.2.1 Struktur Rotor dan Stator
Secara umum, motor DC terdiri dari stator ( bagian diam ) berbentuk silindris dengan dengan magnet yang dipasang secara berpasangan, magnet dapat berupa magnet permanen atau kumparan electromagnet. Terdapat beda kutub magnet pada keliling stator, didalam stator terdapat rotor ( bagian bergerak ) yang terdiri dari silinder besi terlaminasi yang dipasang pada batang penggerak ( shaft ) yang disokong oleh bantalan (
bearing ) sehingga shaft dapat berputar. Ruang kosong antara permukaan rotor dengan stator dapat diberi lilitan armature untuk memperbesar efek gaya Lorentz.
4
Gambar 2.1 Penampang motor 2 kutub
Fluks magnet cenderung memilih jalur yang paling kecil reluktansinya. Karena reluktansi udara lebih besr dibanding reluktansi pada besi, fluks akan bergerak melewati lintasan terpebdek dari stator ke rotor. Akibatnya fluks medan magnet akan berarah tegak lurus secara radial terhadap kumparan armature. Nilai fluks magnet sama besar untuk sekeliling rotor karena besar medan magnet sama. Dengan hukum Lorentz dan aturan tangan kanan, akan dihasilkan torka yang memutar shaft berlawanan arah jarum jam untuk kondisi yang digambarkan.
2.2.2 Gaya Gerak Listrik ( GGL/emf ) terinduksi dan Komutasi
Saat rotor berputar, konduktor ( armature dan besi ) bergerak melintasi medan magnet yang dihasilkan stator sehingga timbul gaya Lorentz. Namun seiring perputaran, arah medan magnet yang dilintasi akan berubah terbalik sehingga menimbulkan gaya yang melawan arah putaran. Masalah ini dapat diatasi dengan menggunakan komutatoruntuk membalik arus sehingga arah medan magnet tetap sepanjang putaran rotor.
5 .3 Komponen utama motor DC
Kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi ruang terbuka diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet.
Current Elektromagnet atau Dinamo. Dinamo yang berbentuk silinder, dihubungkan ke
as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi.
Commutator. Komponen ini terutama ditemukan dalam motor DC, kegunaannya adalah untuk transmisi arus antara dinamo dan sumber daya.
Gambar 2.3 Bagian dalam motor DC
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
6 Gaya Elektromagnetik ( E )
E = K ɸ N
Torque : T = K ɸ Ia Dimana :
E = gaya elektromagnetik yang dikembangkan pada terminal dynamo ( volt ). ɸ = flux medan yang berbanding lurus dengan arus medan.
N = kecepatan dalam RPM ( putaran per menit ). Ia = arus dinamo.
K = konstanta persamaan.
.4
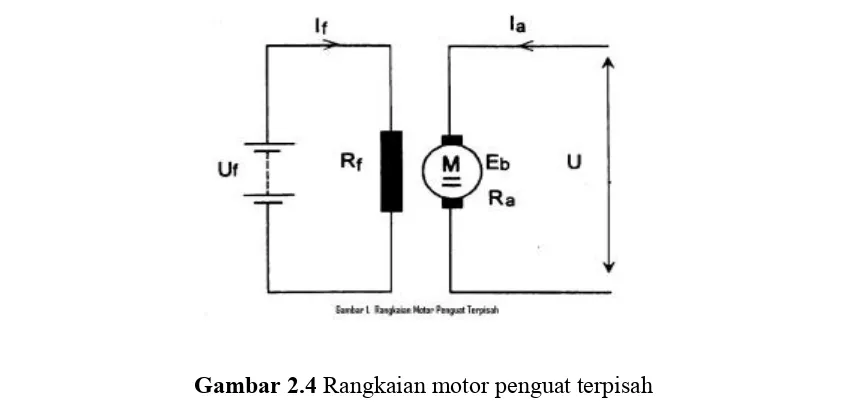
Jenis – jenis motor DC2.4.1 Motor arus searah penguat terpisah, (jika arus penguat magnet diperoleh dari sumber arus searah di luar motor tersebut).
Gambar 2.4 Rangkaian motor penguat terpisah
7 2.4.2 Motor arus searah dengan penguat sendiri, (jika arus penguat magnet diperoleh dari
motor itu sendiri).
Berdasarkan hubungan lilitan penguat magnet terhadap lilitan jangkar, motor arus searah dibedakan menjadi :
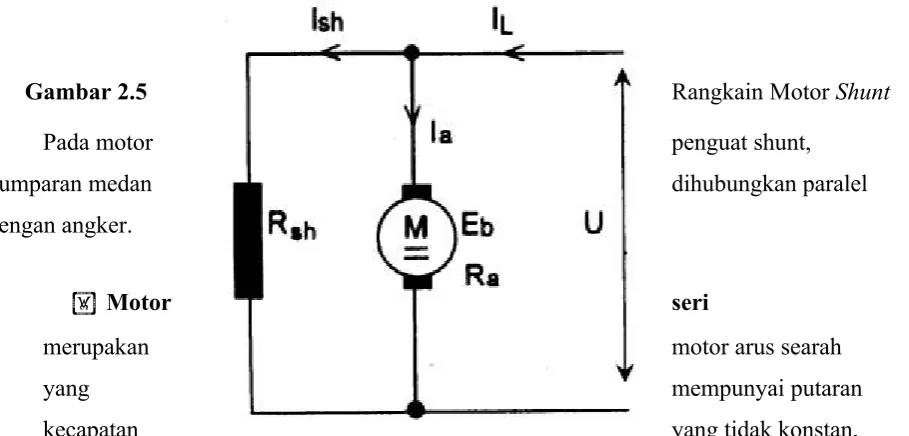
Motor Shunt
Motor shunt mempunyai kecapatan hampir konstan. Pada tegangan jepit konstan, motor ini mempunyai putaran yang hampir konstan walaupun terjadi perubahan beban
Gambar 2.5 Rangkain Motor Shunt
Pada motor penguat shunt,
kumparan medan dihubungkan paralel
dengan angker.
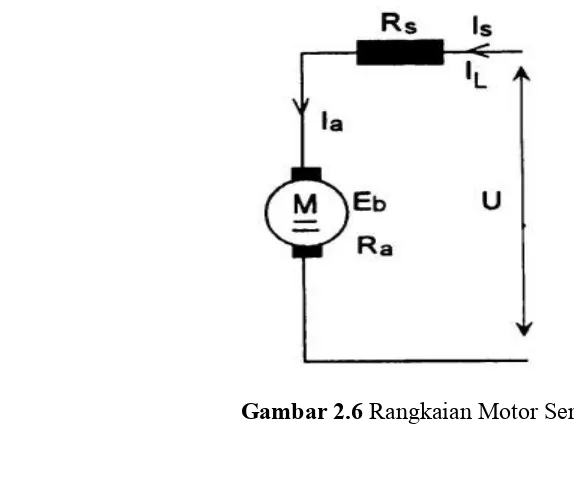
Motor seri
merupakan motor arus searah
yang mempunyai putaran
kecapatan yang tidak konstan,
jika beban tinggi maka putaran akan lambat.
Gambar 2.6 Rangkaian Motor Seri
Motor Kompon
Motor kompon ini mempunyai sifat seperti motor seri dan shunt, tergantung lilitan mana yang kuat ( kumparan seri atau shunt ).
Gambar 2.7 Rangkaian Motor Kompon Panjang
Pada motor kompon mempunyai dua buah kumparan medan dihubungkan seri dan paralel dengan angker. Bila motor seri diberi penguat shunt tambahan seperti gambar diatas disebut motor kompon shunt panjang.
.5 Bagian – bagian motor dan fungsinya
2.5.1 Badan Motor listrik
Fungsi utama dari badan motor adalah sebagai bagian tempat untuk mengalirnya
fluks magnet yang dihasilkan kutub-kutub magnet, karena itu badan motor dibuat dari bahan ferromagnetik. Disamping itu badan motor ini berfungsi untuk meletakkan alat-alat tertentu dan melindungi bagian-bagian motor lainnya.
Pada badan motor terdapat papan nama yang bertuliskan spesifikasi umum atau data teknik dari motor. Papan nama tersebut untuk mengetahui beberapa hal pokok yang perlu diketahui dari motor tersebut. Selain papan nama badan motor juga terdapat kotak hubung yang merupakan tempat ujung-ujung penguat magnet dan lilitan jangkar.
Ujung-ujung lilitan jangkar ini tidak langsung dari lilitan jangkar tetapi merupakan ujung kawat penghubung lilitan jangkar yang melalui komutator dan sikat-sikat. Dengan adanya kotak hubung akan memudahkan dalam pergantian susunan lilitan penguat magnet dan memudahkan pemeriksaan kerusakan yang mungkin terjadi pada lilitan jangkar maupun lilitan penguat tanpa membongkar mesin.
2.5.2 Inti kutub magnet dan lilitan penguat magnet
Sebagaimana diketahui bahwa fluks magnet yang terdapat pada motor arus searah dihasilkan oleh kutub - kutub magnet buatan yang dibuat prinsip elektromagnetis. Lilitan penguat magnet berfungsi untuk mengalirkan arus listrik sebagai terjadinya proses elektromagnetis.
2.5.3 Sikat-sikat
10 2.5.4 Komutator
Komutator yang digunakan dalam motor arus searah pada prinsipnya mempunyai dua bagian yaitu :
1) Komutator bar merupakan tempat terjadinya pergesekan antara komutator dengan sikat-sikat.
2) Komutator riser merupakan bagian yang menjadi tempat hubungan komutator dengan ujung dari lilitan jangkar.
2.5.5 Jangkar
Umumnya jangkar yang digunakan dalam motor arus searah adalah berbentuk selinder dan diberi alur - alur pada permukaannya untuk tempat melilitkan kumparan-kumparan tempat terbentuknya GGL lawan. Seperti halnya pada inti kutub magnet, maka jangkar dibuat dari bahan berlapis - lapis tipis untuk mengurangi panas yang terbentuk karena adanya arus liar. Bahan yang digunakan jangkar ini sejenis campuran baja silikon.
2.5.6 Lilitan jangkar
Lilitan jangkar pada motor arus searah berfungsi sebagai tempatterbentuknya GGL lawan.Pada prinsipnya kumparan terdiri atas :
1) Sisi kumparan aktif, yaitu bagian sisi kumparan yang terdapat dalam alur
jangkar yang merupakan bagian yang aktif (terjadi GGL lawan sewaktu motor bekerja).
2) Kepala kumparan, yaitu bagian dari kumparan yang terletak di luar alur yang berfungsi sebagai penghubung satu sisi kumparan aktif dengan sisi kumparan aktif lain dari kumparan tersebut.
3) Juluran, yaitu bagian ujung kumparan yang menghubungkan sisi aktif dengan komutator.
.6 Kelebihan dan kekurangan motor DC
Kelebihan motor DC jika dibandingkan dengan motor AC adalah:
1. Torka dan kecepatannya mudah dikendalikan 2. Torka awalnya besar
3. Performansinya mendekati linier
11
5. Cocok untuk aplikasi motor servo karena respon dinamiknya yang baik 6. Untuk aplikasi berdaya rendah, motor DC lebih murah dari motor AC Adapun kekurangan dari motor DC adalah:
1. Membutuhkan perawatan yang ekstra
2. Lebih besar dan lebih mahal ( jika dibandingkan dengan motor AC induksi ) 3. Tidak cocok untuk aplikasi kecepatan tinggi
4. Tidak cocok untuk aplikasi berdaya besar
5. Tidak cocok digunakan pada kondisi lingkungan yang cepat berdebu .7 Aplikasi Motor DC
Motor listrik ditemukan dalam aplikasi yang beragam seperti industri, blower
kipas dan pompa, peralatan mesin, peralatan rumah tangga, alat-alat listrik, dan disk drive. Mereka mungkin didukung oleh ( misalnya, perangkat portabel bertenaga baterai atau kendaraan bermotor ) langsung saat ini, atau dengan arus bolak - balik dari kotak distribusi sentral listrik. Motor terkecil dapat ditemukan pada jam tangan listrik. Menengah dimensi motor sangat standar dan karakteristik menyediakan tenaga mesin nyaman untuk kegunaan industri. Motor listrik sangat terbesar digunakan untuk penggerak kapal, kompresor pipa, dan pompa air dengan peringkat dalam jutaan watt. Motor listrik dapat diklasifikasikan oleh sumber tenaga listrik, dengan konstruksi internal, dengan aplikasi, atau dengan jenis gerakan yang diberikan.
Untuk motor DC sendiri sudah banyak digunakan dalam berbagai bidang teknologi, antara lain :
1. Aplikasi motor DC sebagai penggerak pintu geser pada otomatisasi sistem monitoring ruangan penyimpanan database menggunakan PLC omron CPM1A I/O 30. Penggerak pintu pada sistem penggerak pintu geser pada otomatisasi sistem monitoring penyimpanan database menggunakan PLC omron CPM1A I/O 20 yang digunakan adalah motor DC. Untuk menggerakkan motor DC diperlukan driver motor DC yaitu
12 membuka pintu. Jika pintu dibuka secara paksa maka alarm akan menyala dikarenakan sensor IR terhalangi oleh benda.
2. Aplikasi motor DC menggunakan paralel port dalam rangkaian robot sederhana. Motor DC dapat dikendalikan komputer ( PC ) melalui paralel port. Untuk dapat mengendalikannya, motor DC perlu dihubungkan sedemikian rupa dengan relay, transistor, dan resistor. Pengembangan dari rangkaian pengendali motor DC ini dapat berupa sebuah robot berjalan. Pada robot ini digunakan dua buah motor DC dan empat buah roda, dua roda untuk sisi, dimana tiap motor DC dihubungkan dengan roda depan. Sehingga roda penggeraknya berada di roda depan.
.8 Prinsip kerja motor DC
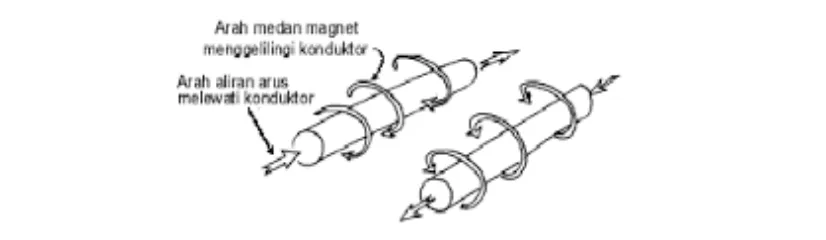
Motor DC memiliki prinsip kerja yang berbeda dengan Motor AC. Pada motor DC jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor.Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor. Dapat dilihat pada gambar dibawah ini :
Gambar 2.8 Medan magnet yang mengelilingi konduktor
13
Gambar 2.9 Aturan genggaman tangan kanan
menunjukkan medan magnet yang terbentuk di sekitar konduktor berubah arah karena bentuk U. Pada motor listrik konduktor berbentuk U disebut angker dinamo. Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub.
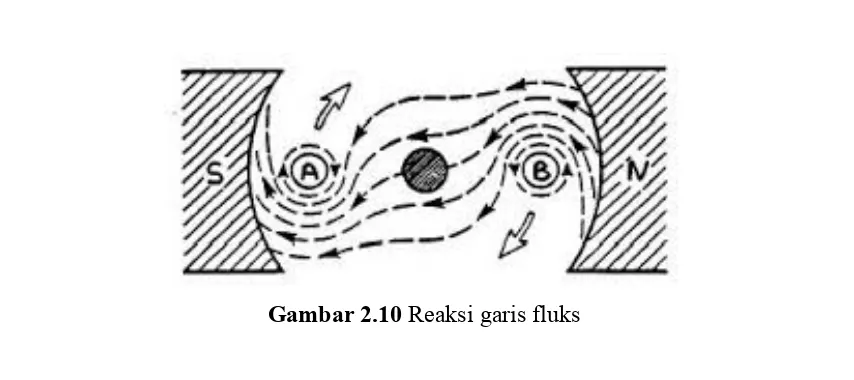
Gambar 2.10 Reaksi garis fluks
Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan ( looped conductor ). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B.Medan konduktor A yang searah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di bawah konduktor. Konduktor akan berusaha bergerak ke atas untuk keluar dari medan kuat ini. Medan konduktor B yang berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
14 2. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran atau loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet akan mendapatkan gaya pada arah yang berlawanan.
3. Pasangan gaya menghasilkan tenaga putar atau torque untuk memutar kumparan. 4. Motor - motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga
putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
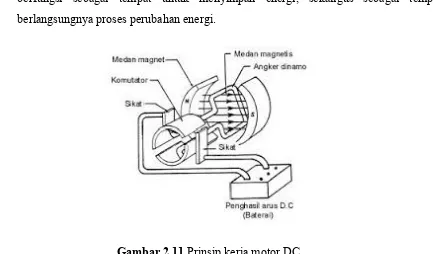
Pada motor DC, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi dari energi listrik menjadi energi mekanik ( motor ) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi.
Gambar 2.11 Prinsip kerja motor DC
15 kawat penghantar yang dialiri arus searah dengan empat jari, maka akan timbul gerak searah ibu jari. Gaya ini disebut gaya Lorentz, yang besarnya sama dengan F. Prinsip motor adalah aliran arus di dalam penghantar yang berada di dalam pengaruh medan magnet akan menghasilkan gerakan. Besarnya gaya pada penghantar akan bertambah besar jika arus yang melalui penghantar bertambah besar.
EMF induksi biasanya disebut EMF Counter atau EMF kembali. EMF kembali artinya adalah EMF tersebut ditimbulkan oleh angker dinamo yang yang melawan tegangan yang diberikan padanya. Teori dasarnya adalah jika sebuah konduktor listrik memotong garis medan magnet maka timbul ggl pada konduktor. Tidak ada arus induksi yang terjadi jika angker dinamo diam. Timbulnya EMF tergantung pada:
1. Kekuatan garis fluks magnet. 2. Jumlah lilitan konduktor.
3. Sudut perpotongan fluks magnet dengan konduktor. 4. Kecepatan konduktor memotong garis fluks magnet.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam tiga kelompok :
16
.9 Perhitungan pada Motor DC
2.9.1 Pengaturan Kecepatan Mesin DC
Dalam penggunaan mesin DC, tidak akan berguna apabila tidak bisa dikontrol kecepatan perputaran dari mesin DC tersebut. Berikut adalah beberapa metode yang biasa digunakan untuk mengontrol kecepatan dari mesin DC.
1. Mengubah voltase pada motor, namun membiarkan medan magnetnya tetap 2. Mengubah medan magnet pada motor, namun membiarkan voltasenya tetap 3. Memberikan hambatan yang dipasang seri dengan motor.
2.9.2 Outpur Daya Mesin DC
Kecepatan sudut dari motor dapat didefinisikan melalui rumus berikut : wm = nm x 2phi/60
dengan,
nm = jumlah putaran yang dilakukanrotor
Dalam penilaian kerja motor DC, biasa digunakan istilah efisensi yang didefinisikan sebagai berikut :
eff = Pout/
Pin x 100%
17 .10 Mengatur Kecepatan dengan Field
Berdasarkan persamaan di atas kita juga dapat memvariasikan kecepatan motor dc dengan memvariasikan field flux Φ. Tegangan armature Es tetap dijaga konstan agar numerator pada persamaan di atas juga konstan. Oleh sebab itu, kecepatan motor sekarang berubah perbandingannnya ke flux Φ; jika kita menaikkan fluxnya, kecepatan akan jatuh, dan sebaliknya.
Metode dari speed control ini seringkali digunakan saat motor harus dijalankan diatas kecepatan rata-ratanya, disebut base speed. Untuk mengatur flux ( dan kecepatannya), kita menghubungkan rheostat Rf secara seri dengan fieldnya.
Untuk mengerti metode speed control, pada gambar di atas awalnya berjalan pada kecepatan konstan. Counter-emf Eo sedikit lebih rendah dari tegangan suplai armature
Es, karena penurunan IR armature. Jika tiba-tiba hambatan dari rheostat ditingkatkan, baik exciting current Ix dan flux Φ akan berkurang. Hal ini segera mengurangi cemf Eo, menyebabkan arus armature I melonjak ke nilai yang lebih tinggi. Arus berubah secara dramatis karena nilainya tergantung pada perbedaam yang sangat kecil antara Es dan
Eo. Meskipun fieldnya lemah, motor mengembangkan torsi yang lebih besar dari sebelumnya. Itu akan mempercepat sampai Eo hampir sama dengan Es.
Untuk lebih jelasnya, untuk mengembangkan Eo yang sama dengan fluks yang lebih lemah, motor harus berputar lebih cepat. Oleh karena itu kita dapat meningkatkan kecepatan motor di atas nilai nominal dengan memperkenalkan hambatan di dalam seri dengan field. Untuk shunt-wound motors, metode dari speed control memungkinkan high-speed / base-speed rasio setinggi 3 : 1. Range broader speed cenderung menghasilkan ketidak stabilan dan miskin pergantian.
18 .11 Pengereman Regeneratif
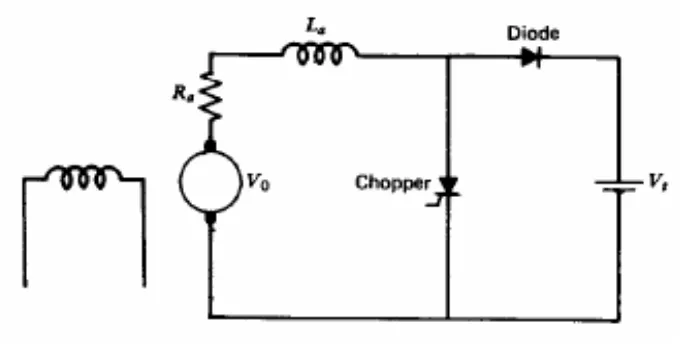
Bagan rangkaian di bawah ini menjelaskan mengenai rangkaian pemenggal yang bekerja sebagai pengerem regeneratif. Vo hádala gaya gerak listrik yang dibangkitkan oleh mesin arus searah, sedangkan Vt hádala tegangan sumber bagi motor sekaligus merupakan batería yang diisi. Ra dan La masing-masing hambatan dan induktansi jangkar.
Gambar 2.12Bagan PengeremanRegeneratif
Prinsip kerja rangkaian ini hádala sebagai berikut :
19 di atas dapat dibagi menjadi dua mode. Mode-1 ketika saklar on dan mode ke-2 ketika saklar off seperti ditunjukkan pada gambar di bawah ini.
Gambar 2.13 Rangkaian ekivalen untuk a) saklar on; b). Saklar off.
dengan :
Vo = gaya gerak listrik
La = induktansi jangkar
Ra = resistansi jangkar
Vt = tegangan batería
i1 = kuat arus jangkar ketika pemenggal on (arus tidak melewati baterai)
i2 = kuat arus jangkar ketika pemenggal off ( arus melewati baterai)
Sedangkan Gambar di bawah ini menunjukkan arus jangkar yang kontinyu dan yang tidak kontinyu.
Gambar 2.14 Arus Jangkar. a). Arus Kontinyu; b). Arus Terputus
.12 Pengereman secara Plugging
Kita bisa menghentikan motor bahkan lebih cepat dengan menggunakan metode yang disebut plugging. Ini terdiri dari tiba-tiba membalikkan arus angker dengan membalik terminal sumber.
Di bawah kondisi motor normal, angker arus / 1 diberikan oleh
I 1 = (E s - E o) IR
di mana R o adalah resistansi armatur. Jika kita tiba - tiba membalik terminal sumbertegangan netto yang bekerja pada sirkuit angker menjadi (E o + E s). Yang disebut counter-ggl E o dari angker tidak lagi bertentangan dengan apa-apa tetapi sebenarnya menambah tegangan suplai E s. Bersih ini tegangan akan menghasilkan arus balik yang sangat besar, mungkin 50 kali lebih besar daripada beban penuh arus armature.
Arus ini akan memulai suatu busur sekitar komutator, menghancurkan segmen, kuas, dan mendukung, bahkan sebelum baris pemutus sirkuit bisa terbuka. Untuk mencegah suatu hal yang tidak diinginkan, kita harus membatasi arus balik dengan memperkenalkan sebuah resistor R dalam seri dengan rangkaian pembalikan .Seperti dalam pengereman dinamis, resistor dirancang untuk membatasi pengereman awal arus
I 2 sampai sekitar dua kali arus beban penuh. Dengan memasukkan rangkaian, torsi reverse dikembangkan bahkan ketika angker telah datang berhenti. Akibatnya, pada kecepatan nol, E o = 0, tapi aku 2 = E s / R, yaitu sekitar satu setengah nilai awalnya. Begitu motor berhenti, kita harus segera membuka sirkuit angker, selain itu akan mulai berjalan secara terbalik. Sirkuit gangguan biasanya dikontrol oleh sebuah null-kecepatan otomatis perangkat terpasang pada poros motor. Lekuk memungkinkan kita untuk membandingkan pengereman plugging dan dinamis untuk pengereman awal yang sama saat ini. Perhatikan bahwa
21 .13 Prinsip Arah Putaran Motor
Untuk menentukan arah putaran motor digunakan kaedah Flamming tangan kiri. Kutub-kutub magnet akan menghasilkan medan magnet dengan arah dari kutub utara ke kutub selatan. Jika medan magnet memotong sebuah kawat penghantar yang dialiri arus searah dengan empat jari, maka akan timbul gerak searah ibu jari. Gaya ini disebut gaya Lorentz, yang besarnya sama dengan F. Prinsip motor : aliran arus di dalam penghantar yang berada di dalam pengaruh medan magnet akan menghasilkan gerakan. Besarnya gaya pada penghantar akan bertambah besar jika arus yang melalui penghantar bertambah besar.
Contoh :
Sebuah motor DC mempunyai kerapatan medan magnet 0,8 T. Di bawah pengaruh medan magnet terdapat 400 kawat penghantar dengan arus 10A. Jika panjang penghantar seluruhnya 150 mm, tentukan gaya yang ada pada armatur.
Jawab :
F = B.I.ℓ.z = 0,8 (Vs/m2). 10A. 0,15 m.400 = 480 (Vs.A/m)
= 480 (Ws/m) = 480 N.
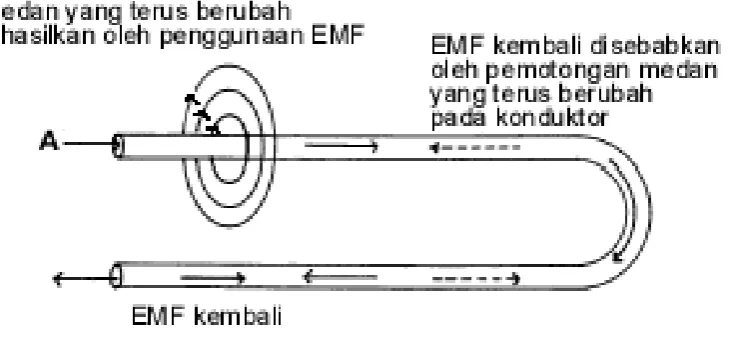
Electromotive Force (EMF) / Gaya Gerak Listrik
EMF induksi biasanya disebut EMF Counter. atau EMF kembali. EMF kembali artinya adalah EMF tersebut ditimbulkan oleh angker dinamo yang yang melawan tegangan yang diberikan padanya.
22
Gambar 2.15 E.M.F. Kembali.
EMF induksi terjadi pada motor listrik, generator serta rangkaian listrik dengan arah berlawanan terhadap gaya yang menimbulkannya.
HF. Emil Lenz mencatat pada tahun 1834 bahwa “arus induksi selalu berlawanan arah dengan gerakan atau perubahan yang menyebabkannya”. Hal ini disebut sebagai Hukum Lenz.
Timbulnya EMF tergantung pada: 1. kekuatan garis fluks magnet 2. jumlah lilitan konduktor
3. sudut perpotongan fluks magnet dengan konduktor
BAB III
JURNAL PRAKTIKUM
.1 Maksud dan tujuan
1. Mahasiswa dapat mengenal motor DC.
2. Mahasiswa dapat mengetahui cara kerja motor DC.
3. Mahasiswa dapat mengetahui komponen motor DC dan fungsinya. 4. Mahasiswa dapat menggunakan motor DC.
.2 Alat dan bahan 1. Tachometer 2. Motor DC
3. Motor speed control
4. Kabel
.3 Langkah kerja
Menghubungkan speed control motor DC ke sumber listrik, mengatur kecepatan motor DC, menghitung kecepatan motor dengan menggunakan DC motor speed, dan buatlah hasil pengukuran.
24
.4 Tabel pengamatan Pengamatan I Karakteristik
Tegangan ( V ) naik Kecepatan ( Rpm )
5 volt 114.9
20 volt 147.1
30 volt 305.2
40 volt 527.5
50 volt 535.8
Tabel 3.1 Tegangan naik
Tegangan ( V ) turun Kecepatan ( Rpm )
50 volt 873.6
40 volt 681.3
30 volt 497.2
20 volt 467.3
5 volt 18.3
25
.5 Grafik
V
Rpm
Gambar grafik perubahan V Rpm hitunglah nilai K motor X = X + b
Karena b = 0 X . X
X Rpm
.6 Kesimpulan
BAB IV
PEMBAHASAN SOAL
.1 Pertanyaan
1. Buatlah skema dari motor DC yang sederhana dan tulis nama-nama bagiannya ! 2. Bagaimana prinsip kerja dari motor DC ?
3. Jelaskan mekanisme kerja dari seluruh jenis motor secara umum !
4. Jelaskan cara mengukur kecepatan putaran motor menggunakan tachometer !
27
.2 Jawaban
1. Bagian-bagian dari motor DC.
Gambar 4.1 Bagian motor DC
2. Prinsip kerja dari motor DC yaitu :
28
Gambar 4.2 Aliran arus konduktor
Aturan genggaman tangan kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah pada arah aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks.
Gambar 4.3 Arah garis fluks
Catatan :
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut
29
2. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet akan mendapatkan gaya pada arah yang berlawanan.
3. Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan. 4. Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga.
4. Cara mengukur kecepatan putaran motor menggunakan tachometer a. Nyalakan motor yang akan diukur putarannya.
b. Nyalakan tachometer untuk mengukurnya, kemudian dekatkan dan arahkan tachometer sampai inframerahnya bertepatan dengan putaran motor yang akan di ukur.