CONTOH LAPORAN PRAKTIKUM SURVEY
PENGUKURAN MENGGUNAKAN ALAT
WATERPAS
BAB I PENDAHULUAN
1.1. Latar Belakang
Ilmu ukur tanah adalah bagian rendah dari ilmu Geodesi, yang merupakan suatu ilmu yang mempelajari ukuran dan bentuk bumi dan menyajikannya dalam bentuk tertentu. Ilmu Geodesi ini berguna bagi pekerjaan perencanaan yang membutuhkan datadata koordinat dan ketinggian titik lapangan Berdasarkan ketelitian pengukurannya, ilmu Geodesi terbagi atas dua macam, yaitu :
1. Geodetic Surveying, yaitu suatu survey yang memperhitungkan kelengkungan
bumi atau kondisi sebenarnya. Geodetic Surveying ini digunakan dalam pengukuran daerah yang luas dengan menggunakan bidang hitung yaitu bidang lengkung (bola/ellipsoid).
2. Plane Surveying, yaitu suatu survey yang mengabaikan kelengkungan bumi dan
mengasumsikan bumi adalah bidang datar. Plane Surveying ini digunakan untuk pengukuran daerah yang tidak luas dengan menggunakan bidang hitung yaitu bidang datar.
Dalam praktikum ini kita memakai Ilmu Ukur Tanah (Plane Surveying) . Ilmu
Ukur tanah dianggap sebagai disiplin ilmu, teknik dan seni yang meliputi semua metoda untuk pengumpulan dan pemrosesan informasi tentang permukaan bumi dan lingkungan fisik bumi yang menganggap bumi sebagai bidang datar, sehingga dapat ditentukan posisi titiktitik di permukaan bumi. Dari titik yang telah didapatkan tersebut dapat disajikan dalam bentuk peta.
Dalam praktikum Ilmu Ukur Tanah ini mahasiswa akan berlatih melakukan pekerjaanpekerjaan survey, dengan tujuan agar Ilmu Ukur Tanah yang didapat dibangku kuliah dapat diterapkan di lapangan, dengan demikian diharapkan mahasiswa dapat memahami dengan baik aspek diatas.
Dengan praktikum ini diharapkan dapat melatih mahasiswa melakukan pemetaan situasi teritris. Hal ini ditempuh mengingat bahwa peta situasi pada umumnya diperlukan untuk berbagai keperluan perencanaan teknis atau keperluankeperluan lainnya yang menggunakan peta sebagai acuan.
1.2. Rumusan Masalah
Menentukan jarak optis dari patok utama ke patak utama berikutnya misal (P0
▸ Baca selengkapnya: contoh laporan situasi dan kondisi
(2)(P0a).
1.3. Maksud Dan Tujuan Praktikum
Praktikum Ilmu Ukur Tanah ini dimaksudkan sebagai aplikasi lapangan dari teoriteori dasar Ilmu Ukur Tanah yang didapatkan oleh praktikan di bangku kuliah seperti poligon, alat dan penggunaannya, sampai pada pembuatan peta.
Tujuan yang ingin dicapai dari praktikum Ilmu Ukur Tanah ini adalah sbb:
Praktikan dapat memahami cara menentukan jarak optis patok utama dan detail,
Memahami cara menentukan beda tinggi,
Memahami cara menentukan koreksi kesalahan, Memahami cara menentukan tinggi patok, dan
Memahami cara mentukan kemiringan patok
1.4. Manfaat Praktikum
Manfaatnya adalah agar praktikan bisa memahami ilmu pengukuran, prosedu pelaksanaan langkah – langkah yang di lakukan. Sehingga ketika praktikan selesai dari Perguruan Tinggi ( Universitas), terjun kedunia industri praktikan bisa langsung mengaplikasikan.
BAB II KAJIAN TEORI
2.1. Teori Pengukuran
Pengukuran waterpass adalah pengukuran untuk menentukan beda tinggi antara dua titik atau lebih. Pengukuran waterpass ini sangat penting gunanya untuk mendapatkan data sebagai keperluan pemetaan, perencanaan ataupun untuk pekerjaan konstruksi.
Hasilhasil dari pengukuran waterpass di antaranya digunakan untuk perencanaan jalan, jalan kereta api, saluran, penentuan letak bangunan gedung yang didasarkan atas elevasi tanah yang ada, perhitungan urugan dan galian tanah, penelitian terhadap saluransaluran yang sudah ada, dan lainlain.
Dalam pengukuran tinggi ada beberapa istilah yang sering digunakan, yaitu :
Garis vertikal adalah garis yang menuju ke pusat bumi, yang umum dianggap sama dengan garis untingunting.
Datum adalah bidang yang digunakan sebagai bidang referensi untuk ketinggian, misalnya permukaan laut ratarata.
Elevasi adalah jarak vertikal (ketinggian) yang diukur terhadap bidang datum. Banch Mark (BM) adalah titik yang tetap yang telah diketahui elevasinya
terhadap datum yang dipakai, untuk pedoman pengukuran elevasi daerah sekelilingnya.
Prinsip cara kerja dari alat ukur waterpass adalah membuat garis sumbu teropong
horisontal. Bagian yang membuat kedudukan menjadi horisontal adalah nivo, yang
berbentuk tabung berisi cairan dengan gelembung di dalamnya.
Dalam menggunakan alat ukur waterpass harus dipenuhi syaratsyarat sbb :
Garis sumbu teropong harus sejajar dengan garis arah nivo. Garis arah nivo harus tegak lurus sumbu I.
Benang silang horisontal harus tegak lurus sumbu I.
2.2. Kegunaan alat.
2.2.1. Fungsi utama.
a. Memperoleh pandangan mendatar atau mendapat garis bidikan yang
sama tinggi, sehingga titik – titik yang tepat garis bidikan/ bidik memiliki ketinggian yang sama.
b. Dengan pandangan mendatar ini dan diketahui jarak dari garis bidik yang
dapat dinyatakan sebagai ketinggian garis bidik terhadap titik – titik tertentu, maka akan diketahui atau ditentukan beda tinggi atau ketinggian dari titik – titik tersebut.
2.2.2. Tambahan alat
Alat ini dapat ditambah fungsi atau kegunaannya dengan menambah bagian alat lainnya. Umumnya alat ukur waterpass ditambah bagian alat lain, seperti :
a. Benang stadia, yaitu dua buah benag yang berada di atas dan dibawah
serta sejajar dan dengan jarak yang sama dari benang diafragma mendatar. Dengan adanya benang stadia dan bantuan alat ukur waterpass berupa rambu atau bak ukur alat ini dapat digunakan sebagai alat ukur jarak horizontal atau mendatar. Pengukuran jarak dengan cara seperti ini dikenal dengan jarak optik.
b. Lingkaran berskala, yaitu lingkaran di badan alat yang dilengkapi dengan
skala ukuran sudut. Dengan adanya lingkaran berskala ini arah yang dinyatakan dengan bacaan sudut dari bidikan yang ditunjukkan oleh benang diafragma tegak dapat diketahui, sehingga bila dibidikkan ke dua buah titik, sudut antara ke dua titik tersebut dengan alat dapat ditentukan atau dengan kata lain dapat difungsikan sebagai alat pengukur sudut horizontal.
2.3.1. Pengertian poligon
Poligon adalah serangkaian garis lurus yang menghubungkan titiktitik yang terletak di permukaan bumi. Garisgaris lurus membentuk sudutsudut pada titik titik perpotongannya. Dengan menggunakan poligon dapat ditentukan secara sekaligus koordinat beberapa titik yang letaknya berurutan dan memanjang.
Pada ujung awal poligon diperlukan satu titik yang telah diketahui koordinat dan sudut jurusannya. Karena untuk menentukan koordinat titik yang lain diperlukan sudut mendatar dan jarak mendatar, maka pada pengukuran di lapangan data yang diambil adalah data sudut mendatar dan jarak mendatar di samping itu diperlukan juga penentuan sudut jurusan dan satu titik yang telah diketahui koordinatnya.
2.3.2. Pengukuran poligon
A. Pengukuran jarak mendatar
Pengukuran jarak mendatar pada poligon dapat ditentukan dengan cara : mekanis (dengan menggunakan pita ukur) dan optis (seperti pada pengukuran sipat datar). pada bagian ini dijelaskan metode pengukuran jarak dengan menggunakan pita ukur. Pengukuran jarak dengan menggunakan pita ukur
skala nol pita ukur diletakkan tepat berimpit di atas pusat anda titik A
pita ukur ditarik dengan kuat agar keadaannya benarbenar lurus, tidak melengkung
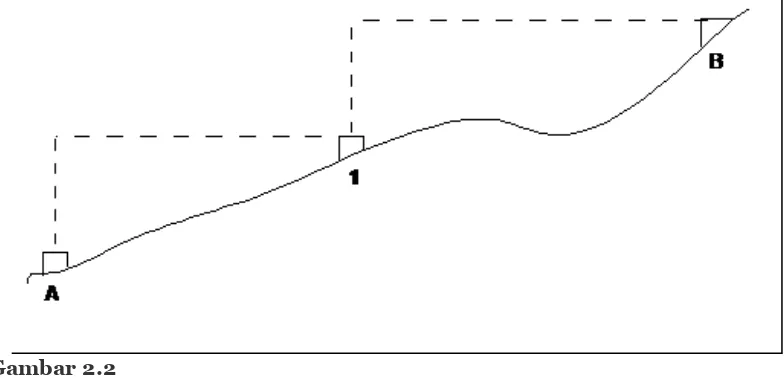
Gambar 2.2
pengukuran jarak pada tanah miring
caranya :
jika permukaan tanahnya relatif miring, maka pengukuran jarak dibagi dalam beberapa selang (pada gambar di atas bagi dua selang)
skala nol diimpitkan di atas titik A (biasa dengan menggunakan bantuan untingunting), tarik agar pita dalam keadaan datar sampai berimpit dengan titik 1, maka diperoleh d1
dengan cara yang sama, jarak diukur dari titik 1 sampai titik B, hingga didapat d2
maka : dAB = d1 + d2
C. pengukuran sudut mendatar
sudut adalah selisih antara dua arah yang berlainan. Yang dimaksud dengan arah atau jurusan adalah besarnya bacaan lingkaran horisontal alat ukur sudut pada waktu teropong diarahkan ke jurusan tertentu. Seperti pada gambar 2.3
Gambar 2.3
Pengukuran sudut mendatar Caranya :
alat dirikan di titik P alalu diatur sesuai ketentuan
target dipasang di titik A dan di tiik B
atur tabung okuler dengamemutar sekrup yang ad pada okuler sehingga dapat melihat garisgaris diafragma (benang silang) denga jelas
atur sekrup penjelas bayangan sehingga dapat melihat bayangan target di tiik A dengan terang dan jelas
tepatkan benang silang diafragma pada target dengan memutar sekrup penggerak halus horisontal dan vertikal, baca dan catat skala lingkaran horisontalnya. Ulangi pembacaan tersebut minimal 3 kali, kemudian hitung ratarata harga hasil bacaannya, catat sebagai L1 (B)
teropong diputar searah jarum jam dan diarahkan ke target di titik B, dengancara yang sama seperti di atas, catat sebagai L2 (B)
teropong dibalikkan dalam kedudukan “luar biasa” an diputar seearah jarum jam, dengan kedudukan tetap mengarah ke titikk B. dnegan cara yang sama seperti di atas, baca skala lingkarannya dan catat sebagai L2 (LB)
putarlah teropong searah jarum jam ke titik A (tetap dalam kedudukan luar biasa), dengan menggunakan cara yang sam seperti di atas, bacalah skala lingkran horisontalnya dan catat sebagai L1 (LB)
urutan pengukuran sudut seperti yang dijelaskan di atas adalah pengukuran sudut 1 seri.
D. Penentuan sudut jurusan awal dan koordinat awal 1. sudut jurusan awal dapat ditentukan sebagai berikut
bila di sekitar titiktitik kerangka dasar terdapat 2 titik triangulasi, sudut jurusan dihitung dari titiktitik triangulasi. Bila menggunakan sudut jurusan awal ini, maka jaring titiktitik kerangka dasar harus disambungkan ke titiktitik triangulasi tersebut.
Bila tidak terdapt titiktitik triangulasi, sudut jurusan awal dapat ditentukan dari pengamatan astronomi (pengamatan matahari atau bintang) dari pengukuran menggunakan girotheodolit yang berorientasi terhadap utara geografi atau dari pengukuran menggunakan theodolit kompas atau ditentukan sembarang.
2. koordinat awal dapat ditentukan dalam sistem umum sebagai berikut : bila dikehendaki koordinat dalam sistem umum (sistem yang berlaku di wilayah negara) digunakan titik triangulasi (cukup satu titik saja). Dengan demikian kerangka dasar harus diikatkan ke titik triangulasi tersebut.
Bila diketahui koordinat dalam sistem umum tetapi tidak terdapat titik triangulasi, maka di salah satu titik kerangka dasar dilakukan pengukuran astronomis untuk menentukan lintang bujurnya. Dari lintang da bujur geografi ini dapat ditentukan koordinat (x,y) dalam sistem
2.3.3. Prinsip hitungan poligon
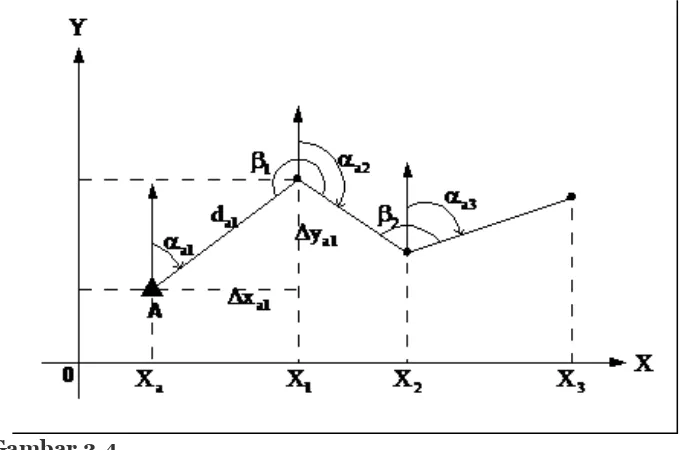
Gambar 2.4
Prinsip hitungan poligon Diketahui :
koordinat titik A
sudut jurusan αA1 diukur dilapangan :
jarak datar dA1
sudut mendatar β1 dihitung :
koordinat titik 1 (X1, Y1)
koordinat titik 2 (X2, Y2)
Tahapan hitungan :
Menghitung koordinat titik 1 :
X1 = XA + ∆XA1 Y1 = YA + ∆YA1
X1 = XA + dA1 Sin αA1 Y1 = YA + dA1 Cos αA1
Jika koordinat titik 1 diketahui, maka koordinat titik 2 dapat dihitung menggunakan koordinat titik 1, apabila d12 dan αA1 diketahui. d12 dapat diukur dan biasanya sudut yang diukur dilapangan adalah sudut mendatar β1.α12 dapat dihitung dari αA1 dan β1
α12 = {( αA1+ 180˚) + β1 } – 360˚
= αA1 + β1 180˚
maka koordinat titik 2 :
X2 = X1 + ∆X12 Y2 = Y1 + ∆Y12
Demikian pula untuk menghitung titiktitik selanjutnya dapat dilakukan secara brtahap dan berurutan menggunakan data koordinat titik sebelumnya. Sudut jurusan titik selanjutnya, dapat dihitung menggunakan α12 dan sudut mendatar yang diukur di titik tersebut
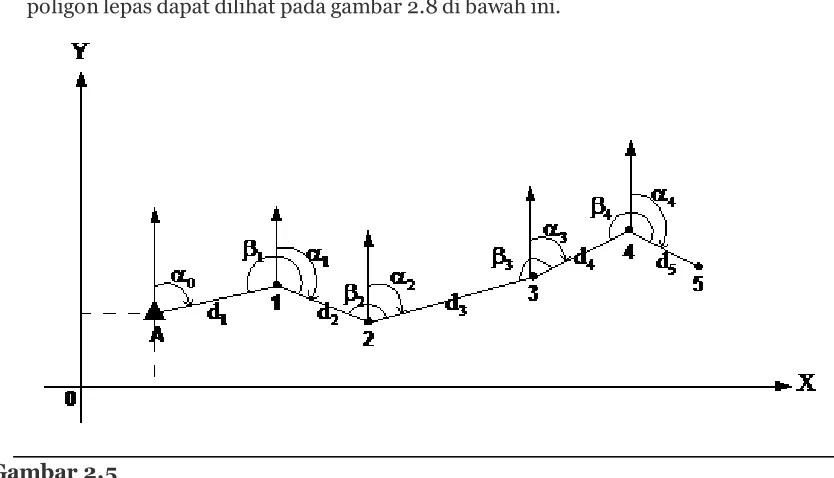
2.3.4. Macammacam bentuk poligon A. Poligon lepas
Poligon lepas adalah poligon yang hanya mempunyai satu titik ikat yaitu di awal dan untuk orientasi sudut jurusan awalnya sudah diketahui. Bentuk poligon lepas dapat dilihat pada gambar 2.8 di bawah ini.
Gambar 2.5
Bentuk poligon lepas
Poligon lepas memungkinkan terjadinya perambatan kesalahan yang disebabkan oleh pengukuran sudut mendatar dan jarak. Contoh : titik 1 telah mempunyai kesalahan akibat adanya pengukuran jarak, titik 2 akan mempunyai kesalahan juga yang lebih besardari titik 1 dan begitu seterusnya. Semakin panjang poligonnya, ketelitiannya akan semakin turun.
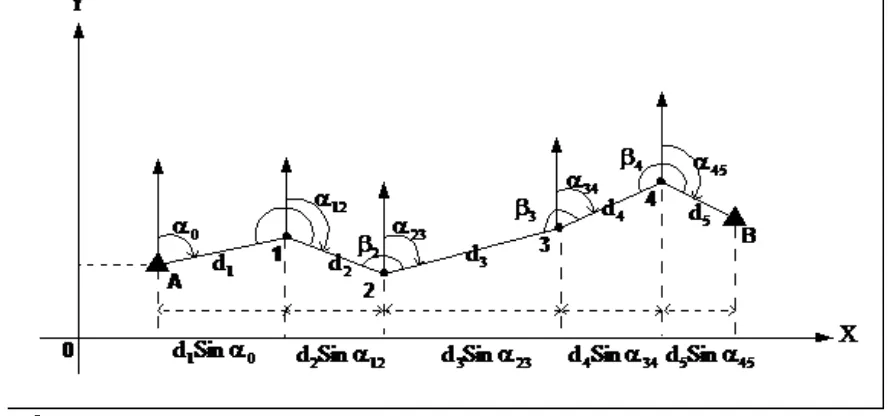
B. Poligon terikat
Pada poligon terikat diberikan satu titik ikat awal berikut jurusan awal dan juga titik ikat akhir atau sudut jurusan akhir.
a) Poligon dikontrol dengan sudut jurusan akhir
Gambar 2.6
Poligon teikat dan dikontrol pada sudut jurusan akhir
Diukur dilapangan :
Jarak datar d1, d2, d3, d4, dan d5
Sudut datar β1, β2, β3, β4
Setelah koordinat titik 1 dihitung dari koordinat titik A, untuk menghitung titik 2 diperlukan α12 dimana :
α12 = {( α0+ 180˚) + β1 } – 360˚ = α0 + β1 180˚
Untuk menghitung titik 3 diperlukan α23 dimana :
α23 = {( α12+ 180˚) + β2 } – 360˚ = αA1 + β2 180˚
= α0 + β1 + β2 – 360˚
Begitu juga selanjutnya :
α34 = {( α23+ 180˚) + β3 } – 360˚ = α23 + β3 180˚
= α0 + β1 + β2 + β3 – 540˚
D`an
α45 = {( α34+ 180˚) + β4 } – 360˚ = α34 + β4 180˚
= α0 + β1 + β2 + β3 + β4 – 720˚
β1 + β2 + β3 + β4 = ( αa – α0 ) + 720˚
∑ sudut diukur = ( αa – α0 ) + n. 180˚
Telah disebutkan sebelumnya bahwa sudut jurusan akhir (α45 = αa )
dan sudut jurusan awa (α0) sudah diketahui. namun setiap pengukuran sudut biasanya mengandung kesalahan, sehingga dapat dibentuk suatu persamaan dengan memberikan koreksi :
∑ sudut diukur + f(α) = ( αa – α0 ) + n. 180˚
Dimana f(α) adalah besarnya koreksi yang diberikan untuk pengukuran sudut.
b) Poligon dikontrol dengan koordinat akhir
Koordinat titik awal dan sudut jurusan awal diketahui, kemudian titik akhir poligon diikatkan ;agi pada satu titik yang telah diketahui koordinatnya
Gambar 2.7
Poligon terikat dan dikontrol koordinat akhir
c) Poligon terkontrol dan terikat sempurna
Pada poligon ini, titik awalnya diikatkan pada satu titik yang ada koordinatnya (titik A) dan mempunyai sudut jurusan awal (α0). Selain itu
pada titik akhir diberikan sudut jurusan akhir (αa) dan diikatkan pada titik
yang telah mempunyai koordinat (titik B). dnegan adanya α0dan αa, koordinat titik awal dan titik akhir, maka hasil pengukurannya dapat dikontrol.
2.3.5. Kontrol kualitas pengukuran poligon
Setiap pengukuran yang dilakukan selalu mengandung kesalahan yang disebabkan oleh berbagai hal, karena itu perlu ditetapkan suatu batas toleransi ukuran yang diperbolehkan.
BAB III
METODE PENGUKURAN
3.1. Alat – alat yang di gunakan
Alat ukur waterpass secara umum memiliki bagianbagian sebagai berikut :
1. Lingkaran horizontal berskala,
2. Skala pada lingkaran horizontal,
3. Okuler teropong,
4. Alat bidik dengan celah penjara,
5. Cermin nivo,
6. Sekrup penyetel fokus,
7. Sekrup penggerak horizontal,
8. Sekrup pengungkit,
9. Sekrup pendatar,
10. Obyektif teropong,
11. Nivo tabung,
12. Nivo kotak.
b. Statif (Kaki Tiga)
Statif (kaki tiga) berfungsi sebagai penyangga waterpass dengan ketiga
kakinya dapat menyangga penempatan alat yang pada masingmasing ujungnya
runcing, agar masuk ke dalam tanah. Ketiga kaki statif ini dapat diatur tinggi
Gambar 3.2
Untingunting
c. Unting – Unting
Untingunting ini melekat dibawah penyetel kaki statif, untingunting ini
berfungsi sebagai tolak ukur apakah waterpass tersebut sudah berada tepat di
atas patok.
Gambar 3.3
Untingunting
d. Rambu Ukur
dan merah dengan dasar putih, maksudnya bila dilihat dari jauh tidak menjadi silau. Bak ukur ini berfungsi untuk pembacaan pengukuran tinggi tiap patok utama secara detail.
Gambar 3.4
Rambu ukur/Bak ukur
e. Payung
Payung digunakan untuk melindungi pesawat dari sinar matahari langsung maupun hujan karena lensa teropong pada pesawat sangat peka terhadap sinar matahari.
Gambar 3.5
Payung
Kompas digunakan untuk menentukan arah utara dalam pengukuran sehingga dijadikan patokan utama dalam pengukuran yang biasa di sebut sudut azimut.
Gambar 3.6
Kompas
g. Nivo
Di dalam nivo terdapat sumbu tabung berupa garis khayal memanjang menyinggung permukaan atas tepat ditengah. Selain itu, dalam tabung nivo terdapat gelembung yang berfungsi sebagai medium penunjuk bila nivo sudah tepat berada ditengah.
Gambar 3.7
h. Rol Meter
Rol meter terbuat dari fiberglass dengan panjang 3050 m dan dilengkapi
tangkai untuk mengukur jarak antara patok yang satu dengan patok yang lain.
Gambar 3.8
Rol Meter
i. Patok
Gambar 3.9
Patok
j. Alat penunjang lain
Alat penunjang lainnya seperti blangko data, kalkulator, alat tulis lainnya, yang dipakai untuk memperlancar jalannya praktikum.
Gambar 3.10
Blangko data, Alat tulis dan Kalkulator
3.2. Lokasi dan waktu
WITA.
3.3. Tim pengukur
3.3.1. Personil
1. Zulaidi E3B1 11 007
2. Lugisman E3B1 11 005
3. Muh. Acil Rusalim E3B1 11 008
4. Wiwin Indra Lesmana E3B1 11 004
5. Rendi Aprianto E3B1 11 002
6. Muh. Saiful E3B1 10 051
7. Asas Swastari E3B1 08 015
3.3.2. Pembagian tugas
1. Pembaca rambu 1 orang
2. Penulis hasil bidik 1 orang
3. Pemegang rambu 2 orang
4. Pemasangan patok 1 orang
5. Pemegang meter 1 orang
6. Pemegang payung 1 orang
3.4. Prosedur Pelaksanaan Praktikum
3.4.1. Penentuan profil
a. Profil Memanjang
Pemasangan patok dilakukan pada jarak tertentu. Dalam hal ini sesuai
dengan keinginan anda. Namun demikian, terlebih dahulu tentukan arah utara dengan menggunakan kompas. Kemudian menolkan nilai
dariwaterpass, dimana arah utara merupakan patokan
utama. Waterpassdiletakkan di tengahtengah antara kedua patok.
Waterpass diseimbangkan dengan melihat kedudukan nivo sambil memutar sekrup penyetel hingga gelembung yang berada di dalamnya dalam kedudukan yang seimbang (di tengahtengah).
Pada pengukuran profil memanjang ini digunakan metode “Double Standing”, yaitu suatu metode dimana pengukuran pergi dan pengukuran pulang dilakukan serempak hanya dengan menggunakan kedudukan
pesawat, misalnya pada pengukuran pergi, P0 sebagai pembacaan
belakang dan P1 sebagai pembacaan muka, begitu pula sebaliknya.
Bak ukur diletakkan di atas patok dengan kedudukan vertikal dari segala arah.
Waterpass diarahkan ke patok pertama (P0) selanjutnya disebut pembacaan belakang. Pada teropong terlihat pembacaan benang atas,
benang tengah dan bawah. Setelah itu waterpass diarahkan ke patok
kedua (P1).
mengadakan pengukuran pulang dengan mengarahkan ke P1 (pembacaan belakang). Pada teropong terlihat pembacaan benang atas, tengah dan bawah.
Pengamatan selanjutnya dilakukan secara teratur dengan cara seperti di atas sampai pada patok terakhir.
Pembacaan hasil pengukuran dicatat pada tabel yang tersedia.
b. Profil Melintang
Waterpass diletakkan pada patok utama dan diseimbangkan kembali
kedudukan nivo nya seperti pada pengukuran profil memanjang.
Pada jarak yang memungkinkan diletakkan bak ukur. Titik yang diukur
disebelah kanan waterpass diberi simbol a, b dan disebelah kiri diberi
simbol c dan d.
Pengukuran dilakukan secara teliti mulai dari patok pertama sampai pada patok terakhir.
Semua data yang diperoleh dicatat pada tabel yang tersedia
3.4.2. Cara Mengoperasikan Alat Ukur Waterpass Ada 4 jenis kegiatan yang harus
dikuasai dalam mengoperasikan alat ini, yaitu :
a. Memasang alat di atas kaki tiga Alat ukur waterpass tergolong kedalam
Tripod Levels, yaitu dalam penggunaannya harus terpasang diatas kaki tiga. Oleh karena itu kegiatan pertama yang harus dikuasai adalah memasang alt ini pada kaki tiga atau statif. Pekerjaan ini jangan dianggap sepele, jangan hanya dianggap sekedar menyambungkan skrup yang ada di kaki tiga ke lubang yang ada di alat ukur, tetapi dalam pemasangan ini harus diperhatikan juga antara lain :
b. Mendirikan Alat ( Set up ) Mendirikan alat adalah memasang alat ukur yang
sudah terpasang pada kaki tiga tepat di atas titik pengukuran dan siap untuk dibidikan, yaitu sudah memenuhi persyaratan berikut:
Sumbu satu sudah dalam keadaan tegak, yang diperlihatkan oleh kedudukan gelembung nivo kotak ada di tengah.
mengarahkan teropong ke sasaran yang akan dibidik, memfokuskan diafragma agar terlihat dengan jelas, memfokuskan bidikan agar objek yang dibidik terlihat jelas dan terakhir menepatkan benang diafragma tegak dan diafragma mendatar tepat pada sasaran yang diinginkan.
3.4.3. Membaca Hasil Pembidikan Ada 2 hasil pembidikan yang dapat dibaca,
yaitu :
a. Pembacaan Benang atau pembacaan rambu.
Pembacaan benang atau pembacaan rambu adalah bacaan angka pada rambu ukur yang dibidik yang tepat dengan benang diafragma mendatar dan benang stadia atas dan bawah. Bacaan yang tepat dengan benang diafragma mendatar biasa disebut dengan Bacaan Tengah (BT), sedangkan yang tepat dengan benang stadia atas disebut Bacaan Atas (BA) dan yang tepat dengan benang stadia bawah disebut Bacaan Bawah (BB). Karena jarak antara benang diafragma mendatar ke benang stadia atas dan bawah sama, maka : BA – BT = BT – BB atau BT = ½ ( BA – BB) Persamaan ini biasa digunakan untuk mengecek benar atau salahnya pembacaan.
Kegunaan pembacaan benang ini adalah :
Bacaan benang tengah digunakan dalam penentuan beda tinggi antara tempat berdiri alat dengan tempat rambu ukur yang dibidik atau diantara ramburambu ukur yang dibidik.
Bacaan benang atas dan bawah digunakan dalam penentuan jarak antara tempat berdiri alat dengan tempat rambu ukur yang dibidik.
Pembacaan rambu ukur oleh alat ini ada yang terlihat dalam keadaan tegak dan ada yang terbalik, sementara pembacaannya dapat dinyatakan dalam satuan meter (m) atau centimeter (cm). Sebagai contoh terlihat pada Gambar.
b. Pembacaan Sudut Waterpass seringkali juga dilengkapi dengan lingkaran
mendatar berskala, sehingga dapat digunakan untuk mengukur sudut mendatar atau sudut horizontal.
Ada 2 satuan ukuran sudut yang biasa digunakan, yaitu :
Satuan derajat
Pada satuan ini satu lingkaran dibagi kedalam 360 bagian, setiap bagian dinyatakan dengan 1 derajat (1°), setiap derajat dibagi lagi menjadi 60 bagian, setiap bagian dinyatakan dengan 1 menit (1’) dan setiap menit dibagi lagi kedalam 60 bagian dan setiap bagian dinyatakan dengan 1 detik (1”).
Satuan grid.
centigrid dibagi lagi kedalam 100 bagian dan setiap bagian dinyatakan dengan 1 centicentigrid (1ccg). Salah satu contoh pembacaan sudut horizontal dari alat ukur waterpass NK2 dari Wild.
3.4.4. Cara Penentuan Beda Tinggi
Dalam praktikum ini, alat yang digunakan adalah alat untuk penyipat
datar (waterpass). Penentuan beda tinggi dengan menggunakan alat
ukurwaterpass dapat dilakukan dengan tiga cara tergantung keadaan di lapangan :
a. Menempatkan alat ukur penyipat datar pada salah satu titik. Misalnya
pesawat di letakkan di titik B. Tinggi A (garis bidik) atau titik tengah teropong di atas titik B di ukur dengan mistar. Dengan gelembung di tengah–tengah lingkaran, garis bidik diarahkan ke mistar (bak) ukur yang diletakkan di titik A.
Besarnya pembacaan benang tengah pada bak ukur dinamakan J, maka beda tinggi antara titik A dan B adalah :
b. Alat ukur penyipat datar ditempatkan diantara titik A dan B. Jarak alat ukur
(pembacaan muka) dan hasil pembacaannya dinamakan V. Maka beda tinggi antara titik A dan B:
c. Menempatkan alat ukur di luar titik A dan titik B, hal ini
dilakukan dilakukan bila keadaan terpaksa, mungkin karena adanya penghalang seperti sungai, selokan atau saluransaluran air lainnya antara kedua titik tersebut. Pada gambar dibawah ini, pesawat ditempatkan di sebelah kanan titik B selanjutnya dilakukan pembacaan benang tengah dan hasil pembacaan bak ukur B disebut V, maka beda tinggi antara titik A dan B adalah :
kesalahannya negatif, juga kesalahan atmopsferiknya saling berbagi.
3.5. Kesalahan Yang Terjadi Dalam Pengukuran
Dalam melakukan pengukuran kita tidak luput dari kesalahankesalahan. Kesalahan itu dapat dibagi dalam tiga kategori yaitu :
a. Kesalahan Besar ( Mistakes Blunder )
Kesalahan ini dapat terjadi karena kurang hatihati dalam melakukan pengukuran atau kurang pengalaman dan pengetahuan dari praktikan. Apabila terjadi kesalahan ini, maka pengukuran harus di ulang atau hasil yang mengalami kesalahan tersebut dicoret saja.
b. Kesalahan Sistimatis ( Sistematic Error )
Umumnya kesalahan ini terjadi karena alat ukur itu sendiri. Misalnya panjang meter yang tidak tepat atau mungkin peralatan ukurnya sudah tidak sempurna. Kesalahan ini dapat dihilangkan dengan perhitungan koreksi atau mengkaligrasi alat/memperbaiki alat.
c. Kesalahan Yang Tidak Terduga/Acak ( Accidental Error )
Kesalahan ini dapat terjadi karena hal–hal yang tidak diketahui dengan pasti dan tidak diperiksa. Misalnya ada getaran pada alat ukur ataupun pada tanah. Kesalahan dapat diperkecil dengan melakukan observasi dan mengambil nilai rata– rata sebagai hasil.
3.6. Hambatan
Hambatan yang terjadi di lapangan ada beberapa faktor yang mempengaruhi jalannya / proses pengukuran yaitu :
3.7. Rumus – rumus yang di gunakan
3.7.1. Rumus Perhitungan Profil Memanjang
a. Perhitungan Jarak Optis patok utama
Rumus :
D = ( Ba – Bb ) x 100
Dimana :
D = Jarak Optis (m)
Ba = Benang atas (mm)
b. Perhitungan Beda Tinggi Patok Utama
Rumus :
∆H = Bt blkn – Bt muka
Dimana :
∆H = Beda Tinggi (m)
Bt blkn = Benang Tengah (mm)
Bt muka = Benang Tengah (mm)
c. Perhitungan Koreksi Kesalahan
Perhitungan Kesalahan Keseluruhan Rumus :
Z =∑ ∆H ± ∆H
Dimana :
Z = Kesalahan
∑ ∆H =
Jumlah Total Beda Tinggi Pengukuran
∆H = Jumlah Beda Tinggi Pengukuran per patok
Perhitungan Kesalahan Perpatok Rumus :
K = (Z / ( n – 1 ))
Dimana :
K = Nilai Koreksi Z = Kesalahan
N = Banyaknya Patok
d. Perhitungan Tinggi Titik Patok Utama
Pn = Pn1 ± ∆H n1 ± K
Dimana :
Pn = Tinggi Titik Utama
Pn1 = Tinggi Titik Utama sebelum Pn ∆H = Beda tinggi
K = Koreksi
e. Perhitungan Kemiringan Patok Utama
Rumus :
/ Tn = (∆H/ D ) / 100 %
Dimana :
/ Tn = Kemiringan Titik Yang ditinjau
∆H = Jarak Optis RataRata Tiap Patok Utama
3.7.2. Rumus Perhitungan Profil Melintang
a. Perhitungan Jarak Optis Detail’
Rumus :
D = ( Ba – Bb ) x 100
Dimana :
D = Jarak Optis
Ba = Benang Atas
Bb = Benang Bawah
b. Perhitungan Beda Tinggi Detail
Rumus :
∆H = Tinggi Pesawat – Bt Detail
Dimana :
∆H = Beda Tinggi
Bt = Benang Tengah
c. Perhitungan Tinggi Titik Detail
T = Pn ± ∆H
Dimana :
T = Tinggi Titik Detai Yang ditinjau Pn = Tinggi Titik Patok Utama
d. Perhitungan Kemiringan Detail
Rumus :
/ T det = ( ∆H Detail / D det ) * 100 %
Dimana :
Dari hasil praktikum yang kami lakukan maka dapat kami simpulkan bahwa :
1. Theodolit adalah alat ruang yang digunakan untuk mengukur sudut jurusan, jarak dan beda tinggi titik di permukaan tanah.
2. Poligon adalah rangkaian garis khayal di atas permukaan bumi yang merupakan garis lurus yang menghubungkan titiktitik dan merupakan suatu obyek pengukuran. Poligon juga biasa disebut sebagai rangkaian segi banyak untuk pembuatan peta.
3. Untuk mendapatkan hasil yang benar maka hasil pengukuran sudut jurusan, jarak dan beda tinggi titik harus mendapatkan koreksi dengan ketentuan tidak melebihi batas toleransi.
4.2 Saran
Saransaran yang dapat kami berikan bertolak dari kesimpulan yang kami buat
adalah:
1. Agar waktu pelaksanaan praktikum dapat dipercepat sehingga dalam pembuatan laporan tidak terburuburu.
2. Untuk menghindari kesalahankesalahan yang besar sebaiknya dalam menjalankan praktikum, praktikan harus dibimbing sebaik baiknya mengingat praktikan baru pertama kali melakukan pengukuran seperti ini.
3. Untuk mendapatkan hasil yang baik dan maksimal diperlukan tingkat ketelitian yang sangat tinggi.