HsS
Ag
PRuC
trB, r'ui. J). NU. i 2oou
\gRespons
getaran
non-iimier
paria
sistem
poros-rotor
Bagian
l: Pengaruh
eelah
bantalan
Tegoeh Tjahjowidodol,
Komang Bagias
rta2,
Zainal
Abidinz,
dan I rwanto:'
lL,aboraksium Dinamika,
PPAUIR - lTB, ,talan Ganesha 10, Bandung 4A182 Telp. 022-2506283 I Fax. 022-2534109, E.mait: [email protected] 'Program
Studi Teknik S-istern Mekanika, Teknik Mesin, Fakultas Pascasarjana, lTts '
Kandidat Prograrn Doktaral, Aachen
MasuK: Agustus 1999; rsvisi mas$kr Juli 2000; diterima: Agustus 2fJ00
S t r i
Dalam kegiatan anaiisis rni diiakukan pernodelan sisteru gi:iait n dcr-rgan gava eksitasi yang berasal dari ketakseimbangan rot*r daii ketaksesumbua[ poros. Caya eksitasi irri ken-rudian diterr.iskan i.:e bantalan dan selanjutnya melalui bantalan diteruskan ke rumai: bantalan. Ketaklinieran kekakuan sistem bantalan yang berasal dari celah (clearance) bantalan terscbut akan mcnghasilkan ci' tersendiri sehirrgga ciri ini dapat digunakan untuk mengidentii'ikasi keausan bantalan yang digunakan. Hasil anaiisis teoretik ini ilf:]"t*
dibandingkan dengan data getaran domain waktu (*,arefornt) yang diperoleh dari kaji ekspelimental patia sisrern
poros-Kata kunci: clearance, diagram Campbeil, FI{F, Metodc Eiemen Hingga Rotasi, iVetode ht[assa lergunipal. respons getsran, strukrur penumpu.
Abstract
Non-linear vibration r€sponse of rotor-shaft system Part I: Influeuce of bearing clearanc:e
An analytical model of a rotor shaft vibration systeil subjected io rotor unbalance and shail inisalignmelt cxcilation li-r;ccs iras irr:cii devcloped. Those excitation forces are fransmitted to a bcaring housing through a rollcr bcaring rnounred o1 the huariiig hgur;irr1; where the vibration response is measurcd. 'l'he non-linearity of the bearing stif{iress due to the bearing clearance revials sor'e specific vibration signatures, which can be utilized for bearing. wear identification. The theoretical results obtained in this sfirdy are compared with those obtained from experinrent.
Key wortis: clearance, Campbell diagram, I"R"?., Finite Rotuti;tg Eienent Methad, I.wnp Mas,s hlethod, vibration r€sponse, .tuppo rl t ilg sl ruclure.
2 l
I Pendahuluan
Pada suatu sistem getaran linier, hubungan antara respons getaran dan stimulusnya dikorelasikan secara linier, sedangkan pada ka'sus non-linier, respons getarannya tidak sepenuhnya mencerminkan perilaku stimulusnya.
Beberapa penelitian yang telah diiakukan U,2.3,41 menunjukkan bahwa bantalan yang banyak digunakan pada mesin rotasi memiliki kekakuan yang tidak linier. Berdasarkar karakteristik kekakuan bantalan yang telah diperoleh nrelalui pemodelan bantalan ll,2l, pada penelitian ini akan dikaji respons getaran yang terjadi sebagai akibat ketaklini eran kekakuan bantalan tersebut. Pengembangan model elemen hingga suatu sistem poros-rotor yang menyeluruh dapat diperr:leh dengan menarnbahkan model teoletik banralan sefia siruktur
penumpunya pada sistern poros-rotor tersebut sehingga karakteristik dinamik keseluruhan sistem poros-rotor dapat diranralkan. Pemodelan yang dilakukan oleh L,allane [5] tidak melibatkan srrukrur penumpu rumah bantalarr yang digunakan, sedangkan pada penelitian ini struktur penumpu bantalan dilibatkan dengan mengguna-kan besaran modus getar berikut, yaitu massa modal, kekakuan nrudal, dan redainau modalnya.
Pengetahuan tentang karakteristik dinamik sistem poros-r'otor, tennasuk frekuensi harmonik yang timtlul akibat ketaklinieran kekakuan sistem, dapat digi.rnakan untuk identifikasi cacat pada sisteiir.
2 Ferrodelan sisterrr poros-rotor [5]
Pada unuunnya komponen utama yang terdapat pada sistem poros-rotor adalah disk (rotor). poros, dan
) )
barriaiari. LJntuk Repe,iuan anaiisis, kunrponcrr dimooelkan sebagai eleitren dcngan enlpat derajat kebebasan pada nodalnya, seperti pada Gambar I
\,
t'Rj:'. l'ttt t/r-t! . i !. Ni, t, ])t){J 0r)
fl 2.1 Fersalnail.n g{rraki'cinl;rlriaii iiiitcrli ir(iriis-rcior cill;rkrikair Jerigriri i'nrit*i-liunakalt il,ji$ar,rii;ul-pclij€iiltaan ya.ng tr:lair dtti,ir-rnliirrr 11; lriirli i.j0f ia {iditgari tituiniii;lllaik:'lrl i)crs;Jitiii.dil gi:t ui: i;r.:iiku i.;
rluisrig-masrng hingga rr:liisi
rlliislll$ -illit$lnf;
i,ot o li" i i'..,, o ;", u ii "
h \ l t 0 l l , i r . r i ) , ) l l o
';.
;;li;l
l';;'
I '; ;,ii;
Lr
l";
I oi,
lu;
i?
,r/,:+
I
[l;, '{.€{.,\
' t *
u - perpiridahair transliisi ptjsai l]eoitieiii iliiialn ijf,ilii sirrnbu X
'vi : perpindahan tianslast pusat geerIirlti-i illiain aiefi ' i ' t n b u Z
o . , . u 4
v = -
w
a :
-Garrtbar'l Llemen hingga pada korrrpoiren $istrJm porc6 iotcr
Perrrodelan dilakukan dengan tnenggiinakr,ii Inetorlc energi yang menrperhifungkan energi pt:telisitil rl:it kinetik dari masirrg-masing koiriponen sistctti ptrr;:i-rotor.
Peisaniaan eiiergi ktnettk rintrik li:toi iiapai iliii;li;kan scbagai bei'ikut [5]:
' t 7 . 2 I . 2 . 7 r - ,
T , r ' - ' I l / ) ( u + ) v i + 1 , , , r 0 + V i t : . f , - i { i ' ; i r y f }
" 2 2 " ^ ' 2 " "
Persamaari energr titnetik dait pi:tcnsiai unir,ak pcrers berputar dapat diperoleh:
| . t I i
I - j , J t l r t , J u , i o w 1 4 . ) i w - t
l ' 6 u M , 6 t ; ' t '
2 ' 2 - 2
. t { I'-
6, *I .6 u,+ {15 u !t'I $ w+ ;,lltl2
2 '
. . I ^ t ^ l ^ ' . . | . . ' , . " ' | . ' L ' . : , 5 u K p u - - J w K 2 b u i : d u K y l u t : ' 5 w h ' o ' f wDalam hal ini N'I1 dan M2 menlatakart nlatriks tiiassa, N'13 dan Ma memberikan efek inersia terhadap pcrcs, dan M5 merupakan matriks nrassa yang berkaitan cierigan efek giroskop. Kl dan K2 merupakan inatriks kekakuan elastik, dan K3 dan IQ merupakan matriks kekakuan yang rnemperhitungkan gaya aksial.
Pernodelan untuk bantalan dipcroieh dari bebo.:r;ipii asumsi berikut:
o Kekakuan darr redarnan diketahtii
. Pengaruh bending pada bantalan diabaikan Diperoleh:
+
V tt *
"f' /
llJ:[,',i]i,,i
; [ri{^,}
, lrl{r} i,''iir;
( i . . 1 - ,Sciusi ;tr':r.t-rraan {2" 1 ) riipcrcii*ii dr,:Lig:';;i t nen}:}{rrniiL.ri , , ' ' . , i t r i : . i i t ! i . . \ [ ] i i { - ; i i l \ ; l l , i i l g u l t , ; : i r t " : | \ ! , ' . ; r t r } f r t r ' i . , , ii.:fs.tl1it dart;;isir:iti ttrtsr:'bi;t keititrilgktt,ot,i i:r'."i tiii;,k 1l:.reiiiki.
tiaya srinrulus pacla -tirttm p*ir:s-irtt-t:t aiitara iaii, l,ir il!.rr liari rnassa tak lir:ii'rlbarrg irada roti:i. {iaya taii- :;eiri-,iii:ttg ini dapa; iliuraikau ri::en-iar1i i.iua ga.va {ialaril ai.iii riinr beibeda, dari i,iecara nraietiiatik dituliskan:
l r . ' l
I ' " l = . f l , s i n f i l r l l , r ; * s i 2 i
l , ^ f , l
I-)alarir hal ini ?, .,,
6--f
' , l s l n { / I
i , - r i r . , d l ) ' l
I
| (:i)s tl IRcspons gel.ilran akibat Eala tak :iciiritrang ilai:iii't diperoleh rnelalui ir*rsantaan i:crikirt:
unp + cb r kp = fz sin Q; + f, cos ()r den;4an: 1', .' iV' F 2 dan /, = g' ?'3
Solusi mnak frersamaan difererrsial terscbui adalah:
[i -,,,e2 {}c
-l[
o, i= [n i
i . " 4 .
r - n t f l l p t l l A l
ilari persamaan di ata;, respons clapat rlinyatakan oleli vektor perpindahan sebesar [5.j:
6 = p l p z s i n il l - t - p 3 c o s C I t ]
?.? Kekakrian Lrsntalan
Kekakuan dan geontetri bantalan niempengaruhi karaktcristik dinamik batttalan inr sendiri. Peneiitian yang dilakukan oletr Ilarris 1,5] yang tirenyatakan hubungan antara beban ,Jan defleksi yang teriadi, dirnodifikasi oleh White [] dengan asumsi bahu'a pc'riisi eleffierr gelinding ntempengaruhi transmisi getaran bantalan. Gambar 2a memperlihafkan hubungan scbasai berikut:
- [ c . r s a I
J!r" I
I da,r
PRAC. ITB, VOL.32, NA ],2OOO G a m b a r 2 a D a e r a h b e l , a i i p a d a b a n t a i a n .!L- r ^ \tr
l : - " A , )' | *", cos1,/
' L A- ? I .nrau
1 ) I Ir=- Vt \Ilengan rnenrperhatikan geomctri bantalan hubungan berikut;
fFu-*l
:
("^'-
"' \
1 - | = ,('.
)- (4,,
I l']"
o'
I
[ f a . , , , , ]
' 7 '
' "
l s t n z j ]
Ekserrtrisitas elemen gelinding ternyata r:ienrpengai-iilii kekakrran bantalan seperti diperlihatkan pada Gamhar 2b"
12 = jari-jari lintasan luar b a n t a l a n r1 = jari-jari lintasan suaian
e = eksentrisitas
Gambar 2b Eksentrisitas elemen geiinding Celah {clearance) pada elemen gelinding memenuhi persamaan berikut [3,8]:
rt (0) =
lJalarn tral ini:
A1 = 2r2 .+ 2e cos(O + a)
z"t
iJ*ngan rnemperhifungkan kekal,.rran nantaian yailg rirpr:rliiiatkan ;:ada persamaan (2.2) dan (2.3), kekakuan bantaian dapat dituliskan sebagai berihit:
K . - K h , , + K u o c o s ? ( 2 4 ' ) Ila.ltrii k..isi,is penelitian ini elipercleh [3]:
K t,n =. J " I07 F"o 1 5 4 5
{ a , i i 2 r : i " i l i f i 4 i - , i j, l t . l r
i.3 loefficltieEan FRF (Fungsi Rsspons lrrekuerisi) Fe;udcian FII,F yarig dikcrnbr:ngkan ,ialarn ke6iaturi penelitiaii iili beirlasarkan konsep laeakan oidc (oltle,' truc:ldng). I!a.riii kasii'.; la,r;akan oi,ie" gai'a ctrlsitasi ditimbulkan olt-'h massa tak s,:inibang pa,rJa r(if-or sehingga iresar gaya -),an!l teria(li leiraldi;lp: dt:rri-l;i;i kuadrat kccrlpatan putar lrva 1oi).
FRI' sistcrn porcs-Lotoi rlapat diperr,ieli rjcli:an
rirernbei:ikan eksitasi yaitg brrsarri).a tr:tap svti;t;al saru satuan. tetapi dengan fiekuensi ilutar yang divariasikal sesuar dengart rentang frekuensr yang rliinginkan. Scrara skematik metode eksitasi tcrscbut dapat dilihat patla Ciambar l,
i{'" tungsi ie..rioils fiekudnsi $t3lern getaran poros,rot(ri li. kekakuan cjinamik sistem getaran pori:s nltor
Gars:bar 3 Metsde eksitasi untuk rriendapaiiri:ri i:Ri.:
Keuntuirgal rnetode ini adalah:
c FI{F yarrg riiperoleh nrerupaka;r FRF sisterr daiaiir keadaan be4tutar
o (iaya eksitasi yang berasai dari rotor bisa rnev;akili kondisi aktual dari suatu inesin rotasi
o Bisa diterapkari unhrk sistr:;ii norriiniei
Respons yang dir:ari pad* niriudc cksitasi di atas dapet diperoleh melah,ri persarnaaii g,:;li. seperii yang teiah dituliskan pada persamaan (2.1), sehingga:
lrr]["]-'
[c]ft]+[r]io,].=
F,",,ei^
(2.);a)
Sepei'ti yang telah disebutkan, unfuk menrperoleh .f i(ii. gaya eksitasi yang diberikan harus rnerniliki besaran sairi satuan sehingga untuk F.,,.-l d;peroleh persamaan:
[,r,r]{*"}+
[c][] , [x ]{^-}
..t. eia,
e.sb')
Solusi peri,;arriaan tersebut loalatr:
i . l r , I
{ . r } [ A ' r i u , r . u t ' t , l ] ' p , " ' ] l , r ( r a ) l
( i . r , )
Ft:ihiiurigan
l,Rir dapat riilakukan
dengair
incmlj.;j.r.
tirnbangkan
pengaruh
strulihlr
penuiitp
il.
diperoir,ir
(z z'i
I;' l tii;
A 1 ,2
( 2 , 3 )
- 4 2 1 ? d lAt * r] - nr' +. u' + zer, cas(O
+ a)
.ladi, dapat disimpulkan eksentrisitas elernrn gelinding menghasilkan fluktuasi periodik kekakuan bantalan.
24
2.4 Respons getaran sistem bantalair
Perumusan respons getaran sistem bantaiart ini dilalaikan un*t *"ngeiahui
-
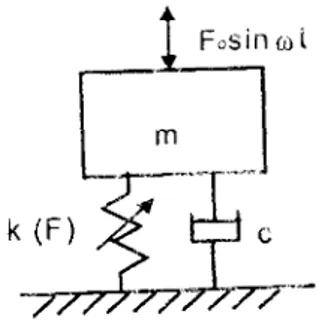
kontribusi sisteln bantalan pada turui".irtir,"dinarnik sistem poi0s-rotor, terutaIna akibat k"rutlini.run kekakuan bannlan' Pettrodelan pcfialna dilakukan dengan nlengarlggap sistem.bantalan tllerupa-kan sistem getaran noniiniti ianr dera1at kebcbasan [7]' seperti yang tampak pada Garnbar 4'
Gambar 4 Model non ltrrier satu detaj'it kebe oasan
Pemodelan diasunrsikan dengan lncrlltlailggap nie'rria ;;;ilt^"g jauh lebih besar daripada nlassa bantalaii itu sendiri serta teflurnpu pada sistem getaran dengan redaman rnodal sebesa" dun kekakuan nonlinier sebesar l;;l ;;"- mcrupakan tungsi dari gava eksitasi F' Harga
;:;tiff;'y;i"k;"
datim
restoiing
force vang diolah
;;J;" bantalan sebelumnya sehinggadapat dinyatakan sebagat:
F(:r) = kr 1' k2.x * k3'x2 + ka-r3 (2 7) sehingga rnenghasilkan persatnaan gcrak be'iikut:
na + ci + l-('r) = F' sin ax (2"8)
Pemodelan berikutnya merupakan model - dua deralat t .U.Uurtl [7] seperti tarnpak pada Gambar 5'
),R0(:. (fB voL. 32, No. 1,2044
Pada pernodelan in: ciapat dianggap gaya eksinsi gctarat akibai ketrdakseiinbangan pada totor inaupun akibat keticlaksesurnbtrarr poros ditelrrskan ke bantalan' iriunju,nyu, mcialui bantalan, gaya diteniskan ke rumah bantalan. Asumst yang diairrtril untuk pemodelan ini adalah:
r L.intasan luar tictak bergerak c Rol rnenggelintiing sempdllrd
c C a c a t b a r r t a l a n t i d a k d i p e r | r i n r r r g k a n S e c a f a l a t I g s I i l } g (digunakan sebagai sumbel eksrtasi)
c Eiek suaian titiak tnerriinbttlkan gaya c-lisitast tersendiri
t 'ferjaciinl'a perubahan kekakrian ilalalrt berbagai s u d u t y ' u t a r a k i b a t c k s e n t r i s i t a s
Petsaniaan gerak tnodel getatan ili atas rittu'rinkatr seb 3,ai beLikut:
m r I C 6 r + ' K 6 ( F , 9 ) r - i ; t t e " " \ 2 ' 9 )
Dalarri hal ini:
t ' = x + i y = r u r t l d a n K 6 ( F , 0 ) = l ( 4 , , , i K 6 " € " d
2,5 llespuns getaran sistcln poros-rotor
Respons getaran sistem poros-rotor dapat.^dipcroleit ;;;;;" mimanfaatkan hasil pernodelan bantalan yang Ltufr oitut_ut an sebelurnnya. pemodelan respons getaran ,lri"* potot-rotor ini dapat 'Jilakukan dengan dua ,n*un^l metode, yaitu metodc massa tergumpal dan rnetode elemen hingga rotast
Lallane [5] telah melakukan pemodela'l ulilttk nrerantal-kan respons getaran pada sistem poros-rotor tanpa t.nturutku,'t efek rumah bantalan dan stnlktur penumpu funtufun. Temyata hasil pengujian FRF' menunjukkan il;; f.ngu*'t rumah bantalan dan struktur pendukuttg ddak daPat diabaikan.
Pemodelan yang dilakukan dengan menrperhirungkarr .i.t **ut 6aniaian dan struktur pendukung dilakukan ;;;g"; menerapkan metode suaian kurva (curve fitting\ ,ut,iO..ujut keLebasan terhadap hasii pengukuran FRF puJ" **"i, bantalan dan struktur penumpunya' Suaian [u*u t.rt.Uut dilakukan untuk memperoleh besaran massa modat, kekakuan modal, dan redaman nrodal yang akan ditarnbahkan dalan-r model teoretik sistem getaran poros-rotor"
Metotle wassc tergumPal SD0F'
Keuntungan pemodelan dengatt tiretode. ini adalah ri"gl^"*i" waktu perhitungart karuna dilakukan secara
""^iiilt
iehingga iitluk tnttnp"rbcsar dirrtertsi ntatriks rcp"ni ft^f
"V "l-erhitun
gan den gan rn"e tode e I e me n h in g ga roiasi. Pemodelan tersebut dapat dilihat pada Garnbar 6'
Rumah
bantalanKb = kekakuan bantalan Kp = kekakuart poros Cb = redaman bantalan Cp = redaman poros Gambar 5 Model sistem getaran dua derajat kebebasan
Kn
(.+-)
A V Y f f{ww
-{-tr-o \ c "
\x
\
K u I
1
\-tF s s i l l
t'Roc:.
frB, v0t".32,
Na. 1, )000
Ganbar 6 $lodel rurnair bantalan dai-r sti\lktui pcnilmf;u
.,\sumsi :t'ang iiigunakan dalant metodr ini adaiah baliwa gctarari yang terjadi hanyalah getaran pnrla k'idang telt(-ntu saja 1in plane). dan tidak ter;adi gerak terkopel antara gcrak horisontal dan vertikal. Ruinah bnntalari dan struktur petumpunya akan dieksitasi olerh gaya yang ditciuskau bantalan dari sistein poros-iotor
Respous lrantalan yang diperoleh dapat digunaxair untuk menentukan besarnya gaya yang akan diterinla rii*li rumah bantalan dan strukfur penumpu tersebut, yaltu:
F = K t ' x + ' c 6 ' i
Selanjutnya, respons rumah bantalan sel"ta struktui penumpunya diperoleh dengan cara nrengalikan gaya eksitasi tersebut terhadap FRF sistem rumah bantalan:
Persamaan (2.10) menunjukkan respons gctaran sisiem poros-r'Otor pada rumah bantalan.
Metotlc elemeii hingga ronst
It{etode elemen hingga rotasi lebih mudah dilakrikan untuk pcrhitungan numerik. Pada metode ini solusi dapat diperoleh melalui pemecahan persamaan gerak seperti yang terdapat pada persamaan (2. l).
Hasil suaian kurva runrah bantalan dan strukfur penun'lpu seperti yang telah diperoleh sebelumnya dapat dirnanfaatkan untuk memperbaiki benruk matriks massa, mahiks kekakuan, dan mah'iks redaman pada persamaan (2.1). Massa modal, kekakuan modal, dan redaman modal hasil suaian kurva pada rumah bantalan dan struktur penumpu dibenruk menjadi beberapa nratriks berikut: 0 0 ntry 0 0 tnn. 0 0
2 5
i u""
[*,
]=
l ;,,
l 0
o
k " . o I
Ik o ,
t
- i r " r l
0
k".
0 |
- k,.u ;
u,, I
r ;
('r,.1=
cu, 0 -tr.. 0 -lA
c,,,, O -,,..,,
'' *'I
I ' ( ; , , , 0 c r , 0 | 0 -co, A c", lili:ri;ii.;ian ini nanya diiakukan pada arah horisoritai saja (are'h x) ss:iringga harga massa modal, kekakrian modal. dan iedarnan modal dalarn arah y dapai dihilangkan. Ketiga nrah'iks pada persarraan (2.1) yang akan tiigabungkaii clengan ketiga niatnks di atas meriiiliki ukuran N x N, dengan N menyatakan jumiah total derajat kc:bebasan sistem^ Maka, penggabuirgan matriks massa eii:ktif, kekakuan et'ektif, dan redaman cfektif dari runtah trantaial dan struktur bantalar tclsebut diiakukan dengan rnr:nji.inriaFrkan komponeit-komponen mariks terscLri-rt parla no'ial-nodal yang bersesuaian sepeni pada ilustiasi l-retikut; f,l ?.1,1\ Ll eti zt 0 U U M " r t ; 0 0 0 M " n : z z @ M t r h f n M ' , t 0 Lt ,, 1,122 M ,-., 0
,t'i;r lv[\. LInq Me0.1 Lf "nn 0 0 M "n ,, t,(,gzz
i 2 lr )
diperoleh, solusi persamaan ge,rak 'Jpera-ci $ merryatalcan operasi penggabungan diia ntatriks stisuai dcngan sisierrt koordinattlya. Mattrks [N'I,,j akan ntcmiliki ukuran sebe sar (N t4) x fl'J-t-4) karena matriks Meff ij men:pakan matriks bcrukuran 2x2, sedangkan rnatriks Nl, rrrerupakan bagian dari mafiiks &I yrng betukuran Q'Jlci) x (N/d) (r/ mcnyatakan jurnlah eiemen pada sistem tersebut).Jika matriks [K"l dan [C,] teiah persamaan dapat dipcroleh n:elalui berikut:
[u" j{"i
+ [c"
]{;}
* [r"]{'i,- {i'(,)i
( 2 , i 2 1
Persamaan
(2"l2) mcrupakan
pcisalnaan
gerak untuk
keseluruhan
sistenr
poros-rotor,
terrnasuk
rumah
bantalan
dan
sistcrn
peilunll)unya.
3
l{asil pemodelarn
liasil penrodelan
Fi{F sistcin ponrs-ro1$r
diperoleh
berdasarkar
ciata
pa<1a
T"abel
i.
0
Uo
t?, ryl^*
r r l u
V r q J = l
n
t "
l 0
26
PR.}C:. ffg, y2t,.3?,, N0. t,2000Iabel I Uata periiodelarr sisaerrr poro$"rotor
Komponen Keterangan Diameter : 0.035 nr Panjang . 0.8 nr i u m i a h : 2 Diameter luar : 0.4 rn Diameter dalarn : 0.035 m Tebal : 0.04 nr Massa : 8 kg $lruktur penumpu Hasil sr"iaian kurva : d a n r u m a h b a n t a l a n p o t e : - - 3 . 9 3 8 1 1 7 J . 1 - 1 i R e s r u ' . r : - 3 3 1 . 5 1 l 0 r : , 3 . 9 1 8 i nr=22 kg, k=2.8e7 l{/r'r, c=0 2 Nsitn i ! n t 5 l . n . 5 i ! l [ " P r n u n r p ! [,lodel l:oros-rotor
Perliitungan FRF' pada . rnodel sistern iroros-ruror ini rnengasurnsikail 2U clemeii, serta dilakukan dengan dua cara, yairu tidak rnelibatkan runrah bantalan beserta struktur penumpu dan dengan melibatkan rumah banialan beserta shuktur penunlpunya. llasil perhitilngan IRF dapat dilihat pacla Gambar 7- 10. Hasil peniodci;:n rcspons getaran sistem bantalan [7] drturrjukkar dalam G a m b a r l 1 - 1 2 .
Estbl t& nbr Lri rl&, Dt r t& b:t rl&
0 2 0 1 5 0 1 0 0 5 . . . * . . = . 1 . . " -1 0 0 1 5 0 Hr
Gambar 7 Penrodelan FRF tanpa struktur penunrpu dan iespons pada sjsi load arah horisontal.
Dari hasil pemodelan ini terliliat adanya frekuensi harmonik dari frekuensi eksitasi yang disebabkan oleh sifat nonlinieritas bantalan.
Gamhnr I freniodelan F[tF tanpa strukt*r p*numpiu ciaii rtjspons pada sisi penggerak arah t:rrisontal.
irz
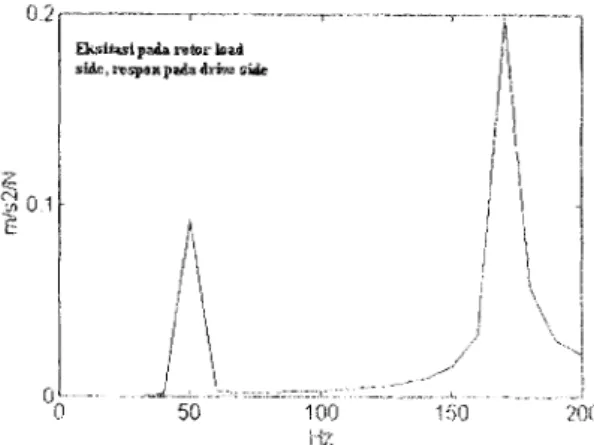
Gambar I PemoeJelan FRF dengarr struktur penr'rrnpr: dan respons pada sisi load ai'ah horisontal.
Gamtlar 10 Pemodelan FRF dengan struktur penumpu dan respons pada srsi penEgerak arah horisontal.
Selanjutnya, dengan menggunakan model yang sama akan dirarnalkan respons getaran dalam bentuk diagrarn Campbell s€rta kurva lacakan orde. Ilasil pemodelan dapat dilihat pada Gamtrar 13. I'}ada Gambar 13 ini ditampilkan kurva frekuensi pribadi pcrtama terhadap putaran poros-rotor yang diberikan. Pada diagrarn terlihat penurunan frekuensi pribadi pertama sistem yang bcrar"ri terj adinya fenomena b a ckw ar d-w h i r I i n g pada sistem.
0 . 2 il l t t l l l I I i i 1 I
1
\
)
l rl 5.*---'. -'- - --,"'[ ;,*;;;;;;;;;:- '
- --
I
^ _l reslarpel*Lansia* * l;;li\l
, r 3 l l \ ]
o,f1\l
I
I ! -,,'l
'll--
-*..--::.-*-:
=..ri-
)
fi
EA]
, i\ I
\---==,"'
\ ,/ 1
V'I
-no __
1io--'-*
:oo
Il stbrl p*ir m bB L.d slis , lespo n lr.d6 d!i,s si&
4 d ^ . , U I t
0i
l'
1 \
t\
1\
i \' "-ia-' -'.'1i:
1 4 0 200 z c! FI,
1 ? 1 0 B 0.6 0 4E6ltsi pedr i&r sl&, nrf.itlA i.r
50 r r L . d drtrr rl&
'\
l\
/ \
_____l i,
50 200i
'ix
i
( A
PROC. tT'g, YOL.32, tro. l,2000
2A
{0
€ - 2 0 4 V : l x , 2 x . 3 x r 4 x A , " r - I mA , \ : i
a i r . / t \ \ i^ / V i \ l \ r . . . n - / '
" A
' : 'i | "4,/'*' \'/\r' Bcarirrg responsci'Irans6ritted fbrce t0 thc bcar
,1 OCI
ts 'r, .1 : wggj1!*l':'"1-!T::_
n r * f = l N ll
: l : A l r--j-/ \__.-,.. ;r\*-.,_*,.--r..__-,1*
:ria*
"'" --ido -' -'"ilo
ttia Bearirrg rusponsc ' ' | l r t i ; - - * - - '
I
A ' *
2 x , r * . 4 x
r r ' " r ' i n r
I
'150f-'
',t" * -*A'-*',*---^.,-
--*l
- r n n t
- - - 0, - . . - , "
- - - * , * * - . - - * - - r - - . .
- - - l
, 5 0 , 1 0 0 r 1 5 0 2 0 0,olt'=-o l .
2a'i ./40r-,,.
0 i T'ransmrtted *--T*-l *--T*-l i l ! ' . ^ - - I ' - - _---.--";.,.
-_-5 Q i-200
i
0
50
0c T UGanrbar 11a l-iasil penrodelan Non l-inear SDOF dengan 1;a,7a eksitaa;i dari ketidakseiml:angan pada frekLrensi 20 l-iz
H z l
"uu6
Resoonse at the bearins hrrust:
Gambar'l'ls Hasil pemodelan Non l-inear SDOF dengan gaya eksitasi dari ketidakseirnbangan dari keriLjal<sesuribuan pada
fiekuensi 20 ilz
- 1 0 0
c o i q n ' t f - r J vi 1OCI
r H z
T'ransmittcd force to ihe bearine housc
rtr
Gambar 12 l-lasil pemodelan TDOF dei'rqan gaya eksitasi ijari ketrdakseinibangan dan ketidaKsesrim,buari pada frekuensi 3U
Y,?.
l'ransmitted fbrce to the bearing housc
r,*__i*_-r.*_*r*-*_l**.-;;"1
lA'.
l
l-,/ \-.. *-/''--,".
,,.--_.*
l
L .* *
---,---i-*--*: -*-*---.-i
0
j 50
: 1 0 0 |
1 5 0
2 A l t
t n i
i R e s p o n r e a t t h e b e a r i n g h o u s er Resoonse at the bcalins housc
I
-i---*. -'i---r"-_*-*-:---:*--i
o f : r l
:
A s 6 1
r ' n J
" 7 0 1
_ / \
, ^
i
: 9 1 ' . ' - - ' I r ' ' ^ . _ _ - i'": _ l_,]
-6oo*-
- - -"-do'""--'-
lbo
150
zoo
ilz $ 'tt I'1 5 0
60d
50
'100
1
50
200
rE
Gambar 11b Hasil penrodelan Non Linear SDOF dengan gaya eksitasi dari ketidakseimbangan pada frekuensi 30 Hz
Jika frekuensi putar yang diberikan diubah sccara bertahap, tetapi dengan besar massa tak seimbang yang tetap, diperoleh kurva lacakan orde yang merupakan tungsi anrplitudo getaran yang tcrjadi terhadap frekuensi putamya, I-lal ini dilakukan dengan tiga jenis pemodelan, yaitu metode SDOF, metode elemen hingga rotasi, dan sistem tanpa penumpu. llasil pemodelan dapat dilihat pada Gambar 14.
6
r,A"^,\r,f."l\-A
2 8
50.br0 50.fi00 * * *a ... -*c- -- . - r '. ' n-- --$.- --,A- -{---- + s0.350 50.300 500 ' Rotaaion frequency (rpmlGambar 13 Uiagram Cainptrell hasil pei-norlelan siste[ir getaran poros-rotor
0 500 '1000
putarail (rpml
*a- xoiitiflr --+ SEOF -,!- tanpa Bef,.rnpu
Gambar 14 Kr;rva iacakarr oroe pa$a beiicrapa jenis i-;ernniJr,:i*ri
4 Hasil pengujian dan pembahasnn
Verit:rkasi pemodelan sisteni poros-rotor ini tiilal<ukan dengan melakukan pengujian pada perangkat uji scpeili terlihat pada Gambar 15. Hasil pengukurall FRI dapat dilihat pada C-iambar l6 dan Gambar 17"
Gambar 15 Perangkat uji sistem poros-rotor
Dari hasil pengujian tersebut dapat disiinpulkan bakin',a hasil pernodelan elemen rotasi sistern poros-rofcr iJil.fr dapat mengidentifikasi beberapa fiekuensi pribadi" Amplirudo puncak lain yang tidak teridentifikasi disebabkan oleh adanya modus getar terkopel dalam pengukuran, sementara penyimpangan yang terjadi dapat
PR0C. iTB, vQr,. 32, N0. i,2400
discbahkan oieh kciidaksiirictrian pciangkat u.1i yang rligunakan, Penyir"npangan dari irasii pcnrttdeiarr Isrscbul disebabkan kart:rta pt:rnodelan yang ciilakukan ciikeni^bangkan dat'i irstiirrsi srsteiit y.rrrg ;irrir'rii clengatt tidak meiiiasrikkari kcmponen sepeili elerrcn kopling
t n 2 N J .r! 15 :l r v ' 0.05 0 i 20 {0 m 60 100 r2o 110
|
'- - 9y4 ,, :- *r:t*t -l
l . - . - : - . - , - _ . _ _ . . _ .Ganrbar 16 Hasil pengujian I-RF dengan eksitasi paija roror sisi beban dan respons pada sisi beban
I K U M F R F d o r r g a n o h d t a C b u . s t chirp peda rotor load ide dan
a 50.550
$ so.sr.,o
p = f , U c J U i: - E 5 0 . 4 0 0 f sr]0 1 000 u . t 0 . 4 5 0 . 4 E 0 3 6 o.zs;
6 0 . 1 0.05 0 a h s l e i o r n g t € r 20 - -c.;;ln--- a0 60 80 100 120 e;F,- I L 180 21n f r . k u . n r l { & iGambar 17 Hasil pengujian FRF dengan eksitasi pacja rotor srsi beban dan respons pada sisi drive
Diagram Campbell dalam pengujian diperoleh dengan rnelakukan pengujian IrRl'pada saat sistern poros-rotor dalam kondisi be4lutar. Itengujian dilakukan dengan inemberikan gaya eksitasi melalui impact hanmer yalng ujung pemukulnya dilengkapi adaptor khusus uut'.ik keperluan ini. Dari hasil pengujian yang dilakukan pacla berbagai putaran poros diperoleh diagranr Carnpbell seperti pada Garnbar 18.
55.000 50.000 4 5 . 0 0 0 40.000 35.000 30.000 25.000 ' - - - - ' . . - - - - i -.'*-:'.-+^- *r.--{ I 0 500 1000 '1500 2400 Rotatlon fr€qu€ncy (rpm) -+-- Th€oretical 8-' f:)p€rimcntai
Gambar 18 Perbandingan diagram Carnpbell hasil pengu.jian dan hasil pemodelan
0.3 0.2,
L.
Ir
I t r ' r J . 5 o.45 0 . t 0.35 t ?o.zs sPRAC irB, VOi.. 32, t{0. t, 2000
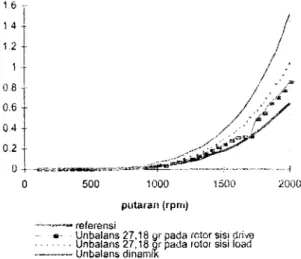
Pertredaan antara hasrl pengu.jian dan hasil pemodelau (Gaiirbar l9) drsebahkail oleh adanya lnassa tak seimbang sisa pada rotor. Hal ini dapat dilihat pada putaran 2000 rpm untuk kandisi ret'erensi yang meng-hasilkan aiirpiitudti perceilai.an seLresar 0.54 mis2 dan hasil simulasi teoretik yang menunjukkan bahwa amplitudo percefjatan tersebut akan dihasilkan uleh nrassa tak seimbang 75 gr"paida i"otor sisi betran.
1 6 1 4 l . a putaran (rprvt -..-*-.-* referensi ' . U n b a l a n s 2 7 . 1 8 u r o a d a ro t o r s i s t d r i v e . . . . . Unbalans 2 7 . 1 8 d r b a d a ro t o r s i s i lo a d - - - - - Unbalans d i n a m r T < ' G a m b a r 1 9 K u r v a l a c a k a n o r d e p a d a s i s i b e b a n
Pen gu.1 ian dan pernodelan dilanj ritkan clengan melakukail beberapa variasi penambahan massa tak seimbang parla putaran 2000 rpm seperti tercanturn pada'fabel 2.
TabEl 2 tiasil pengujian rlan pemocielan dengan penamLreharr 2l .18 gr massa tak seiinbang pada rotoi sisi bebarr
Kenaikan amplitudo yang terlihat pada 'Iabel 2 merupakan kenaikan amplihrdo pada putaran 2000 ipm. Selisih antara amplirudo percepatan setelah penambahan massa tak seimbang pada rotor sisi beban dengan amplitudo percepatan pada kondisi referensi akan rnenghasilkan kurva lacakan orde seperti terlihat pada Gambar 20.
l-lasil penrodelan sistem dengan banruau trtetodc elemen hingga rotasi menunjukkan hasil yang cukup baik, s€mentara pemodelan tanpa struktur penumpu akati rnenghasilkan arnplitudo percepatan yang lebih kecil, Hal ini mudah dipahami mengingat pcnunlnan kekakuan model akibat kekakuan modal struktur penumpu,
*a----l-+*1.
pularan trrJmi
Ganrbar ?0 Kurva lacakan orde hasil pemocielan sistern kontinu dan hasil pengujian
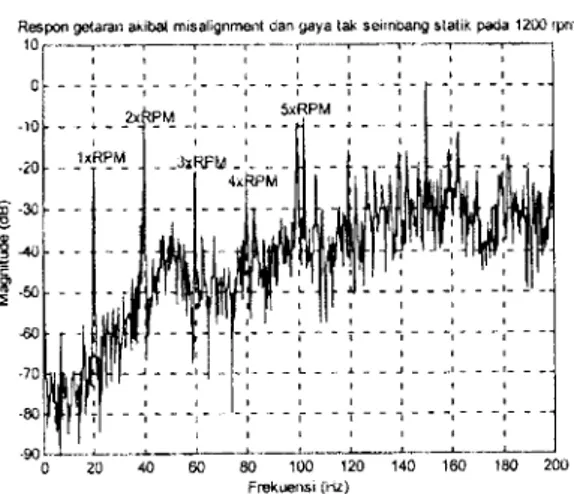
Pcngukuran respons getar^^ untuk kondisi iak seiiirhang statil; menghasilkan kurva-kuli,a seperti i'ang tlriihat pada {ianrbar 2l dan Gatnbar 22, i-nasiirg,-itlasing i;rrtiil'-putaran 1200 4rm dan 1800 rprrr. Pada Gainbar 23 terlihat respons getaran akibat gaya tak seinrbang; rian juga akibat misalignntent pada piitararr 1200 r^prn"
Respcri akilra! gaya lak seimbar! rlstik 3? :i2 g. pad? i2Nj rjrrir
Gambar 21 fespons getaran akibat gaya tak sei;nbang statik (mu=82.52 gr) pada l200 rpm
Gambar 22 r,.::,1ror,s g€taran akibat gaya tak sflnri:ang siatiK (mu=112.5? gii pada 1800 rpm
29
0 . 4 0 . 3 5 0 . 3 N I 0.25+ i o t
g $ . 1 5 0 . 0 5E
B E E t 1 500 'I O , B 0 . 6 0 4 0 . 2 0Pemodetan tanpa strukiur penumpu
30
JrRFu
-Gambar 23 respons geiaran akibat gaya tak seimbang statlk dan misalignment Pada 1200 rPrn
Ketiga kurva respons tersebut dapat dibandingkari dengan hasil pemodelan pada Gambar 1 la, I lb, dan I lc. Hasil yang diperoleh rrrenunjukkan bahwa frekuensi arnplirudo puncak-resporrs getaran hasil pernodelan bersesuaian dengan cukup baik terhadap hasil pengujian yang dilakukan.
R6poo g€taar aiibat misalignG)l oan !6ya tak geirnMng statik Paja 1200 lpm
Nomenklatur Massa rotor
Momen inersia tcrhadap sumbu x Momen inersia terhadap sutnbu y Kecepatan putar sistem
Sudut putar pada surnbu x Sudut putar pada sumbu y Sudut putar pada sumbu z
Koordinat titik pusat rotor relatif terhadap sumbu x Koordinat titik pusat rotor relatif terhadap sumbu z Momen inersia luas penampang
Panjang elemen
Massa per satuan volume
Posisi angular massa unbalance pada kondisi awal
PROC. I1'8, rOL. J2, NO. 1, 2004
terjadi akan semakin besar jika terdapat lebih dari satu komponen frekuensi eksitasi.
Simulasi model elcmen hingga rotasi sistem poros-rotor dari 0 sarr-rpai dengan 12000 rpm, yang stinrulusnya berupa safu satuan gaya eksitasi, menghasilkan kurva FRF yang sesuai dengan kurva FRF hasil pengujian.
Hasil pernodelan sistem poros-rotor dengan metode massa tergumpal menghasilkan respons getaran yang frekuensi amplitudo puncak-puncaknya bersesuaian cukup baik dengan hasil pengujian yang dilakukan.
7 Ucapan terima kasih
Tulisan ini merupakan bagian dari penelitian utatlla yang berjudul 'Mechanical Signature Analysis of Synchronous and .'synchronous Excited Rotating Rotor Supported by Rolling Element Bearing'" Pcnelitian tersebut dibiayai oleh Hibah Tim Direktorat Jenderal Pendidikan Trnggi, Departemen Pendidikan dan Kebudayaan, Republik Indonesia melalui Graduate Teatu Research Grant dengan kontrak no. 01 8/HTPPIIAJRGE/l 996.
8 Daftar pustaka
i. White, M.F., Rolling element bearing vibration transfer characteristics: Effect of stiffness, I. Applied Mechanics, 46, 611 -684 (191 9)
2. Lim, T.C. & Singh, R., 'Vibration transmission through rolling elemertt bearings, Part I: Bearing stiffness formulation', Journal oJ' Sound and
Vibration, 139(2), 179-199 ( I 990)
3. Irwanto, Kaji teoretik dan analisis respons getaran sistem poros-rotor yang ditumpu oleh bantalan Rol, Tesis Magister, Program Shrdi Tcknik Mesin, Program Pascasarjana ITB (1997)
4. Iskandar, I"5., Kaji el<sperimental dan analisis teoretik respons getqrqn sistem poros-rolor karena massa tak seimbang dan cacat pada bantalan,Tesis Magister, Program Studi Teknik Mesin, Program Pascasarjana ITB (l 997)
5. Lallane, Michel & Ferraris, Guy, Rotordynamics prediction in engineering, John Wiley & Sons, Inc
( I 990)
6. Harris, T.A., Rolling bearing analysis, John Wiley & S o n s , I n c . , ( 1 9 9 1 )
Irwanto, Bagiasnb, K., & Abidin, Z. Analisis getaran nonlinear pada sistem poros-rotor: Model teoretik dan analisis bantilan Rol., Proceedings of Experimental and Theoretical Mechanics'91, Bandung, 1997
Irwanto, Bagiasna, K., & Abidin, Z. Roller bearing stiffness calculation and Simulations: A Comparative study, Proceeding of CMSE'97, Bandung, 1997
5
Mp Iox Iovc)
Ao
v
u
I IL
p
cl3 .
4 .
7 .
8 .
6 KesimpulanLlerdasarkan hasii yang diperoleh dari pemodelan dengan menggunakan metode elemen rotasi maupun pengukuran dalam kegiatan eksperimental, dapat ditarik beberapa kesimpulan berikut:
1. Dari hasil pemodelan FRF sistem poros-rotor terlihat bahwa karakteristik dinamik struktur penumpu cukup beryengaruh dalam pemodelan FR-F sistem poros-rotor secara keseluruhan. Perbedaan hasil tersebut disebabkan oleh karakteristik sistem penumpu yang kurang kaku sehingga sangat meln-pcngaruhi karakteristik sistem secara keseluruhan. 2. Celah pada bantalan mengakibatkan eksentrisitas
dan nonlinieritas kekakuan pada bantalan sehingga menimbulkan distorsi sinyal eksitasi. Distorsi yang