SUMBER BELAJAR PENUNJANG PLPG 2017
MATA PELAJARAN/PAKET KEAHLIAN
TEKNIK REHABILITASI DAN REKLAMASI HUTAN
BAB X
PENGUKURAN DAN PEMETAAN HUTAN
DR RINA MARINA MASRI, MP
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN
DIREKTORAT JENDERAL GURU DAN TENAGA KEPENDIDIKAN
2017
1
BAB X
PENGUKURAN DAN PEMETAAN
Ilmu ukur tanah adalah bagian rendah dari ilmu yang lebih luas yang di namakan ilmu
geodesi. Ilmu geodesi mempunyai dua maksud yaitu maksud ilmiah untuk menentukan bentuk permukaan bumi dan maksud praktis untuk membuat bayangan yang dinamakan peta dari sebagian besar atau sebagian kecil permukaan bumi.
Pengukuran-pengukuran dilakukan dengan maksud untuk mendapatkan bayangan daripada keadaan lapangan, dengan menentukan tempat titik-titik diatas permukaan bumi terhadap satu sama lainnya. Untuk mendapatkan hubungan antara titik itu, baik hubungan yang mendatar maupun hubungan tegak, diperlukan sudut-sudut yang harus diukur. Untuk hubungan mendatar diperlukan sudut yang mendatar dan untuk hubungan tegak diperlukan sudut yang tegak pada gambar I, untuk menyatakan garis tegak PA, buatlah bidang tegak lurus yang melalui PA. buatlah pada bidang ini garis mendatar dan garis tegak melalui titik P. Keadaan gairs tegak PA dapat dinyatakan dengan menggunakan garis mendatar atau garis tegak. Sudut anatara PA dan garis mendatar dinamakan garis miring h dan sudut antara PA dan garis tegak lurus dinamakan sudut zenith z, karena garis tegak lurus yang ditarik melalui titik zenith z adalah h + z = 90%. Sudut manakah yang diukur, tergantung pada kontruksi skala lingkaran tegak.
Bila garis PA ke bawah, maka sudut miring letak dibawah garis mendatar dan akan diberi tanda negatif. Dangan mudah akan dimengerti, bahwa h dapat mempunyai harga antara 0o dan
90o dengan tanda positif dan negatif, sedang sudut zenith z selalu mempunyai tanda positif dan
mempunyai harga antara 0o dan 180o. Pada sudut-sudut miring yang kecil, sukarlah untuk
menentukan tanda, maka kebanyakan dari lingkaran tegak skalanya dibuat sedemikian rupa, hingga yang diukur selalu sudut zenith, dengan tidak ada kesukaran mengenai tandanya.
2
A. Pengukuran Dasar Kerangka Vertikal 1. Metode Sipat Datar
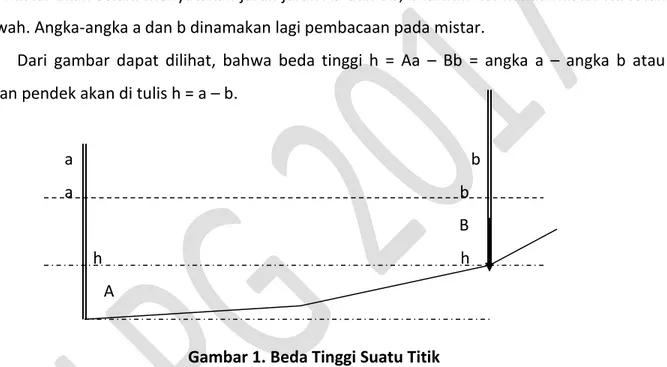
Beda tinggi antara dua titik adalah jarak antara kedua bidang nivo yang melalui titik-titik itu. Selanjutnya bidang nivo dianggap mendatar untuk jarak-jarak yang kecil antara titik-titik itu. Apabila demikian, beda tinggi dapat ditentukan dengan menggunakan garis mendatar yang sembarang dan dua mistar yang dipasang diatas kedua titik A dan B. Misalkan sekarang garis mendatar itu memotong mistar A di titik a dan mistar B di titik b, maka angka a dan angka b pada mistar akan selalu menyatakan jarak-jarak Aa dan Bb, bila titik nol kedua mistar itu letak dibawah. Angka-angka a dan b dinamakan lagi pembacaan pada mistar.
Dari gambar dapat dilihat, bahwa beda tinggi h = Aa – Bb = angka a – angka b atau dengan pendek akan di tulis h = a – b.
a b a b B h h
A
Gambar 1. Beda Tinggi Suatu Titik
Cara menghitung tinggi garis bidik atau benang tengah dari suatu rambu dengan menggunakan alat ukur sifat datar (waterpass). Rambu ukur berjumlah 2 buah masing-masing didirikan diatas dua patok yang merupakan titik ikat jalur pengukuran .alat sifat optis kemudian di letakan ditengah-tengah antara rambu belakang dan muka. Alat sifat datar diatur sedemikian rupa sehingga teropong sejajar dengan nivo yaitu dengan mengetengahkan gelembung nivo. Setelah gelembung nivo diketengahkan barulah dibaca rambu belakang dan rambu muka yang terdiri dari bacaan benang tengah, atas dan bawah. Beda tinggi slag tersebut pada dasarnya adalah pengurangan benang tengah belakang dengan benang tengah muka.
3
Gambar 2. Pembacaan Rambu Muka dan Belakang
- Variabel bebas :BTA dan BTB - Variabel terikat : Δ HAB
- Diferensial ~ tingkat ketelitian δ Δ HAB = δ BTA + δ BTB
2. Metode Trigonometri
Untuk menentukan beda tinggi dengan cara trigonometri diperlukan alat pengukur sudut (theodolite) untuk dapat mengukur sudut-sudut tegak. Sudut tegak dibagi dalam dua macam ialah sudut miring m dan sudut zenith z. sudu miring m diukur mulai dari keadan mendatar, sedang sudut zenith z diukur mulai dari keadan tegak lurus yang selalu kearah titik zenith alam.
Misalkan akan ditentukan beda tinggi antara titik-titik A dan B dengan cara trigonometri, maka dititik A ditempatkan alat ukur sudut dan di titik A diukur sudut miring atau sudut zenith.
4
Keterangan : - D = D’ cos
- Δ hAB = ti + D’ sin – Bt
3. Metode Barometri
Yaitu menentukan beda tinggi dengan cara mengamati tekanan udara disuatu tempat lain yang dijadikan referensi dalam hal ini misalnya elevasi ± 0,00 meter permukaan air laut rata-rata.
Keterangan :
= massa jenis rasa air raksa ( hydragirum ) g = gravitasi ~ 9.8 m/s² - 10 m/s²
h= tinggi suatu titik dari MSL ( Mean Sea level )
5
P = . g . V/A ; V/A = h; P = g . h
PB = Hg.gA.hA ; PB = Hg.gB.hB ; PB – PA = Hg.gB.hB - Hg.gA.hA
hAB = hB – hA = (PB – PA) / Hg . ( gB – gA )
Keterangan :
P = Tekanan Udara ; = Massa Jenis ; Hg = Hydragirum ; V = Volume ; A = Luas ; g = gravitasi ; h = Tinggi Titik dari MSL (Mean Sea Level)
Pengukuran Sipat Datar Kerangka Dasar Vertikal
Pengukuran sipat datar kerangka dasar vertikal harus dieliminasi dari kesalahan sistematis dan acak serta bebas dari kesalahan besar (blunder). Jika terjadi blunder maka pengukuran harus diulangi. Eliminasi kesalahan sistematis pada pengukuran sipat datar kerangka dasar vertikal adalah dengan melakukan pengukuran KGB (kesalahan garis bidik) karena sistem alat. Eliminasi kesalahan sistematis pada pengukuran sipat datar kerangka dasar vertikal karena sistem alam, yaitu : (1) Jumlah slag genap, (2) Jarak belakang dibuat hampir sama dengan jarak muka, (3) Pembacaan rambu ukur 0,300 meter < BA, BT, BB < 2,700 meter.
Data yang diambil dari lapangan adalah BA (benang atas), BT (benang tengah) dan BB (benang bawah) dari rambu ukur hasil bidikan alat waterpass optis. Jarak belakang (db) dan jarak muka
(dm) dari pengukuran menggunakan pita ukur. Pengukuran KGB dilakukan pada 2 x alat berdiri,
stand I dan stand II, alat didirikan di stand I dan digeser sedikit pada stand II untuk melakukan pembacaaan BA, BT dan BB stand I dan II serta db dan dm stand I dan stand II.
(BTb1 – BTm1) (BTb2 – BTm2)
Rumus KGB = --- - --- (db1 + dm1) (db2 + dm2)
Prosedur pengolahan data sipat datar kerangka dasar vertikal, yaitu :
Kontrol bacaan di lapangan, yaitu : |(BA+BB)/2 – BT | < 0,001 meter atau 1 mm
doptis = (BA – BB). 100, kontrol untuk jarak horisontal menggunakan pita ukur.
1. Mencari benang tengah belakang dan muka koreksi, yaitu : BTbk = BTb –KGB. db dan BTmk = BTm – KGB. dm
2. Mencari beda tinggi Hij = BTbk - BTmk
6
3. Melakukan kontrol beda tinggi untuk memperoleh kesalahan acak beda tinggi Takhir – Tawal = H = H12 + H23 + ... + Hij + f H
f H = Takhir – TawalH = Takhir – TawalH12 + H23 + ... + Hij)
Jika rute sipat datar tertutup, kembali ke titik awal maka : Takhir – Tawal = 0
f H = H = H12 + H23 + ... + Hij)
4. Memperoleh nilai beda tinggi koreksi dengan pembobotan = [d12/(d12+...+dij)]
H12-koreksi = H12 + f H. [d12/(d12 + ...+dij)]
...
Hij-koreksi = Hij + f H. [d12/(d12 + ...+dij)]
5. Memperoleh nilai tinggi awal titik 1 dari Google Earth atau dari interpolasi garis kontur yang telah ada dengan prinsip segitiga sebangun atau rasio alas = rasio tinggi
6. Menghitung tinggi titik berikutnya dengan persamaan : T2 = T1 + H12-koreksi
...
Tj = Ti + Hij-koreksi
7. Kontrol hasil pengolahan data, yaitu : Jumlah bobot Bobot = 1
Jumlah beda tinggi koreksi Hkoreksi = Takhir – Tawal = 0 (jika pengukuran diawali dan
diakhiri pada titik yang sama)
Tinggi titik akhir perhitungan = tinggi titik ikat (benchmark) akhir atau tinggi titik akhir = tinggi titik awal jika pengukuran diawali dan diakhiri pada titik yang sama.
B. Pengukuran Kerangka Dasar Horizontal 1. Cara Pengikat Kemuka
Apabila titik P diikat pada tiik A (Xa , Ya ) maka untuk mencari Xp dan Xp diperlukan ap dan dap. dapat ditemukan pada yang diketahui dan dap dari jarak pula yang diketahui. Untuk kedua unsure dan d dapat digunakan dan d dari garis lurus dengan kedua titik ujungnya diketahui, misalnya dengan titik A (Xa, Ya )dan B (Xb, Yb ).
7
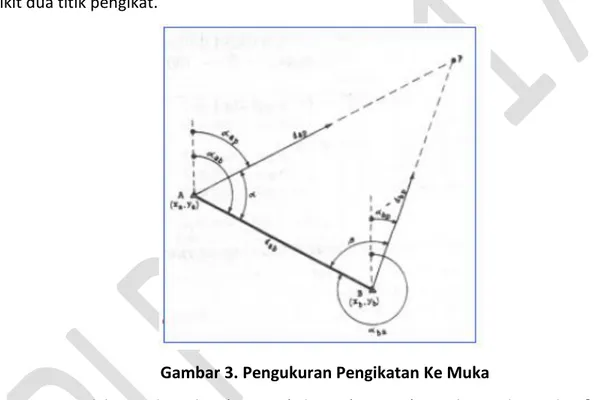
Untuk dapat dap dan dab, maka perlu dibuat suatu segitiga dengan dua sisinya dap dan dab. Maka perlu pula dihubungkan p dengan titik B, sehingga berbentuk segitiga PAB. Pada cara pengikat diukur sudut-sudut yang ada pada titik-titik pengikat A (Xa, Ya ) dan B (Xb, Yb ) ialah sudut PAB = alasnya dan sudut PBA = . Maka dari segitiga diketahui alas dab dan dua sudut alasnya dan . Segitiga PAB dapat dilukiskan dan dengan titik A dan B diletakkan dengan koordinat. Maka dengan lukisan dapat ditentukan tempat titik P terhadap A dan B. segala sesuatu yang bentuknya dapat dilukiskan dapat pula dihitung unsur-unsurnya, jadi Xp dan Yp dari titik P. kesimpulan yang dapat ditarik adalah : pada cara pengikat kemuka diperlukan paling sedikit dua titik pengikat.
Gambar 3. Pengukuran Pengikatan Ke Muka
Teori P diikat pada titik A ( Xa, Ya ) dan B ( Xa , Ya) . Diukur sudut dan yang letak pada titik A dan titik B. Dicari absis Xp dan ordinat Yp dititik P. Carilah selalu lebih dahulu sudut jurusan dan jarak yang diperlukan. Koordinat-koordinat titik P akan dicari dengan menggunakan koordinat-koordinat titik A dan B, sehingga akan dapat dua Xp dan Yp yang harus sama besarnya, kecuali perbedaan kecil dari hasil perhitungan. Diperlukan lebih dahulu sudut jurusan dan jarak yang ditentukan sebagai dasar hitungan. Hitungan dengan logaritma
a. Mencari sudut jurusan ab jarak dab
AB = Tan-1 { (XB – XA) / (YB – YA) }
8
b. Xp dan Yp dicari dari titik A : diperlukan ap dan dap AP = AB - dAP = [dAB / sin (180-)] / sin
XP = XA + dAP sin AP
YP = YA + dAP cos AP
c. XP dan YP dicari dari titik B ; diperlukan BP dan dBP
Diketahui bahwa BA = BA + 180°, karena sudut jurusan dua arah yang berlawanan
berselisih 180°. Selanjutnya dapat dilihat dari gambar bahwa, BP = AB+180°+-360(AB + )-180°.
Dengan rumus sinus dalam segitiga ABP didapat: DBP = [dAB/sin (180-sin
Maka :
XP = XB + dBP sin BP
YP = YB + dBP cos BP
2. Poligon
Poligon yaitu digunakan apabila titik-titik yang akan dicari koordinatnya terletak memanjang sehingga membentuk segi banyak (poligon). Untuk daerah yang relatif tidak terlalu luas, pengukuran cara poligon merupakan pilihan yang sering digunakan, karena cara tersebut dapat dengan mudah menyesuaikan diti dengan keadaan daerah/lapangan. Penentuan koordinat titik dengan cara poligon ini membutuhkan :
a. Koordinat awal
Bila diinginkan sistim koordinat terhadap suatu sistim tertentu, haruslah dipilih koordinat titik yang sudah diketahui misalnya : titik triangulasi atau titik-titik tertentu yang mempunyai hubungan dengan lokasi yang akan dipatokan. Bila dipakai system koordinat local pilih salah satu titik, BM kemudian beri harga koordinat tertentu dan tititk tersebut dipakai sebagai acuan untuk titik–titik lainya.
b. Koordinat akhir
Koordinat titik ini dibutuhkan untuk memenuhi syarat Geometri hitungan koordinat dan tentunya harus dipilih titik yang mempunyai sistim koordinat yang sama dengan koordinat awal.
9
c. Azimuth awal
Azimuth awal ini mutlak harus diketahui sehubungan dengan arah orientasi dari system koordinat yang dihasilkan dan pengadaan datanya dapat di tempuh dengan dua cara yaitu sebagai berikut :
1) Hasil hitungan dari koordinat titik–titik yang telah diketahui dan akan dipakai sebagai tititk acuan system koordinatnya.
2) Hasil pengamatan astronomis (matahari). Pada salah satu titik poligon sehingga didapatkan azimuth ke matahari dari titik yba. Dan selanjutnya dihasilkan azimuth kesalah satu poligon tersebut dengan ditambahkan ukuran sudut mendatar (azimuth matahari).
d. Data ukuran sudut dan jarak
Sudut mendatar pada setiap stasiun dan jarak antara dua titik kontrol perlu diukur di lapangan. Data ukuran tersebut, harus bebas dari salah sistematis yang terdapat (ada alat ukur) sedangkan salah sistematis dari orang atau pengamat dan alam di usahakan sekecil mungkin bahkan kalau bisa ditiadakan.
e. Hitung koordinat titik
Sebelum menghitung masing-masing koordinat titik dengan rumus yang ada dengan terlebih dahulu harus dipenuhi syarat-syarat geometri dari poligon tersebut yaitu :
Syarat Sudut Horisontal :
AKHIR - AWAL = - (n-2).180o + f(1)
1-koreksi = 1 + (f/n) ... n-koreksi = n + (f/n)
23 = 12 + 180o + 1-koreksi – 360o
n-1 - n = n-2 – n-1 + 180o + n-koreksi – 360o (harus sesuai sketsa pengukuran)
Syarat Absis (X) :
XAKHIR – XAWAL = d. Sin + fX ...………(2)
X2 = X1 + d12. Sin 12 + fX . (d12/ d) Metode Bowditch
...
10
X2 = X1 + d12. Sin 12 + fX . [d12. sin 12/ (d. sin )] Metode Transit
...
Xn = Xn-1 + dn-1 n. Sin n-1 n + fX. [d12.Sin 12/ (d.Sin )] Metode Transit
Syarat Ordinat (Y) :
YAKHIR – YAWAL = d. Cos + fY ……...………(3)
Y2 = X1 + d12. Cos 12 + fY . (d12/ d) Metode Bowditch
...
Yn = Yn-1 + dn-1 n. Cos n-1 n + fY. (d12/ d) Metode Bowditch
Y2 = X1 + d12. Cos 12 + fY . [d12. cos 12/ (d. cos )] Metode Transit
...
Yn = Yn-1 + dn-1 n. Cos n-1 n + fY. [d12.Cos 12/ (d.Cos )] Metode Transit
f β = kesalahan ukuran sudut yang terjadi, f x = kesalahan ukuran jarak sepanjang absis, f y = kesalahan ukuran jarak sepanjang koordinat. Macam-macam Poligon
a. Bentuk Visual 1) Poligon Terbuka
Poligon ini merupakan poligon dengan titik awal dan titik akhir yang berbeda . Macam-Macam Poligon Terbuka :
- Poligon terbuka terikat sempurna, - Poligon terbuka terikat sepihak,
- Poligon terbuka terikat dua buah koordinat, - Poligon terbuka terikat dua azimuth,
- Poligon terbuka sempurna. 2) Poligon Tertutup
Poligon tertutup adalah merupakan poligon dengan titik awal dan titik akhir berada pada titik yang tetap sama. Rumus-rumus yang di gunakan :
11
- Syarat-syarat sudut penutup pada poligon tertutup.
= (n-2) . 180o ...(untuk sudut dalam)
- ) = (n-2) . 180o ...(untuk sudut luar)
- Syarat-syarat kooordinat pada poligon tertutup.
Xakhir – Xawal = d . sin ...(untuk absis)
Yakhir – Yawal = d . cos ...(untuk ordinat)
- Koordinat poligon tertutup
akhir - awal = - (n-2).180o ...(syarat sudut)
Xakhir – Xawal = d . sin ...(syarat absis)
Yakhir – Yawal = d . cos ...(syarat ordinat)
Keterangan :
Xakhir dan Yakhir = absis dan ordinat titik awal
d12 = jarak antara titik 1 dan 2
α 12 = Azimuth dari titik 1 ke 2
Σβ = jumlah sudut dalam
n= jumlah titik-titik poligon tertutup. b. Bentuk Geometri
1) Poligon Terikat
Diketahui dari gambar:
Diukur : sudut-sudut βA, β1, β2 , β3 dan jarak-jarak dA1, d12, d23, d3C
Dicari : koordinat (X1, Y1), (X2,Y2), (X3, Y3), titik –titik T1, T2, dan T3.
Bertolak dari sudut jurusan α AB, memakai sudut β1, β2 , β3 dapat dicari secara
berturut-turut jurusan α A1, α 12, α23, α3C
AB = Tan-1 [(XB-XA)/(YB-YA)] ; CD = Tan-1 [(XD-XC)/(YD-YC)]
A B C D 1 2 3 1 2 3 A1 dA1 d12 d23 d3C A
12
CD - AB = βA+β1+β2+β3- (n-2).180o + f n = 4 titik poligon
fAB - CD – (βA+β1+β2+β3) + (4-2).180o
A-koreksi = A + f1-koreksi = 1 + f2-koreksi = 2 + f3-koreksi = 3 + f
Dan seterusnya analog dapat dicari αA1, α12, α23 dan α3C dan akhirnya akan diperoleh :
αA1 = αAB + A-koreksi – 360o ; α12 = αA1 + 180o + 1-koreksi – 360o
α23 = α12 + 180 + 2-koreksi – 360o ; α3C = α23 + 180o + 3-koreksi – 360o
Dimana: - n: banyaknya sudut yang perlu, (β) = jumlah dari n sudut itu.
Oleh karena pengukuran sudut-sudut β selalu dihinggapi kesalahan maka terdapat salah penutup sudut f dengan hubungan.
fAB - CD – (βA+β1+β2+β3) + (4-2).180o
Setelah mendapat sudut jurusan sementara dicari selisih absis (X) dan selisih ordinat (Y) dua titik dengan Syarat Absis dan Syarat Ordinat.
Suatu pengukran poligon yang tidak dihinggapi kesalahan akan menghasilkan terpenuhinya :
XC – XA = dA1.sin A1 + d12.sin 12 + d23.sin 23 + d3C.sin 3C+ fX ... (syarat absis)
YC – YA = dA1.cos A1 + d12.cos 12 + d23.cos 23 + d3C.cos 3C+ fY ...(syarat ordinat)
Akan tetapi kesalahan yang menghinggapi ukuran sudut dan ukuran jarak, menjadi sebab tak terpenuhi, dalam hal ini dikatakan terdapat salah penutup fX dan salah satu
penutup ordinat fY dengan hubungan :
fx = XC – XA - dA1.sin A1 - d12.sin 12 - d23.sin 23 - d3C.sin 3C
fY = YC – YA - dA1.cos A1 - d12.cos 12 - d23.cos 23 - d3C.cos 3C
Urutan tahap hitungan terikat adalah sebagai berikut. - Menghitung jurusan awal dan jurusan akhir,
AB = Tan-1 [(XB-XA)/(YB-YA)]
CD = Tan-1 [(XD-XC)/(YD-YC)]
- Mencari salah penutup sudut f,
fAB - CD – (βA+β1+β2+β3) + (4-2).180o
13
αA1 = αAB + A-koreksi – 360o
α12 = αA1 + 180o + 1-koreksi – 360o
α23 = α12 + 180 + 2-koreksi – 360o
α3C = α23 + 180o + 3-koreksi – 360o
sebelumnya sudut-sudut i tidak terkoreksi maka :
A koreksi = A + (f1 koreksi = 1 + (f
2 koreksi = 2 + (f3 koreksi = 3 + (fharus dipenuhi.
- Menghitung selisih koordinat
XC – XA = dA1.sin A1 + d12.sin 12 + d23.sin 23 + d3C.sin 3C+ fX
YC – YA = dA1.cos A1 + d12.cos 12 + d23.cos 23 + d3C.cos 3C+ fY
- Mencari salah penutup koordinat fX dan fY
fx = XC – XA - dA1.sin A1 - d12.sin 12 - d23.sin 23 - d3C.sin 3C
fY = YC – YA - dA1.cos A1 - d12.cos 12 - d23.cos 23 - d3C.cos 3C
- Mengoreksi selisih koordinat dan menghitung koordinat akhir dengan Metode Bowditch X1 = XA + dA1.sin A1 + fX . [dA1/(dA1+d12+d23+d3C)] Y1 = XA + dA1.cos A1 + fY . [dA1/(dA1+d12+d23+d3C)] X2 = X1 + d12.sin 12 + fX . [d12/(dA1+d12+d23+d3C)] Y2 = X1 + d12.cos 12 + fY . [d12/(dA1+d12+d23+d3C)] X3 = X2 + d23.sin 23 + fX . [d23/(dA1+d12+d23+d3C)] Y3 = X2 + d23.cos 23 + fY . [d23/(dA1+d12+d23+d3C)]
- Mengoreksi selisih koordinat dan menghitung koordinat akhir dengan Metode Transit
X1 = XA + dA1.sin A1 + fX . [dA1. sin A1/(dA1. sin A1+d12. sin 12+d23. sin 23+d3C. sin 3C)]
Y1 = YA + dA1.cos A1 + fY . [dA1. cos A1/(dA1. cos A1+d12. cos 12+d23. cos 23+d3C. cos 3C)]
X2 = X1 + d12.sin 12 + fX . [d12. sin 12/(dA1. sin 12+d12. sin 12+d23. sin 23+d3C. sin 3C)]
Y2 = Y1 + d12.cos 12 + fY . [d12. cos 12/(dA1. cos A1+d12. cos 12+d23. cos 23+d3C. cos 3C)]
X3 = X2 + d23.sin 23 + fX . [d12. sin 12/(dA1. sin 12+d12. sin 12+d23. sin 23+d3C. sin 3C)]
14
2) Poligon bebas
Suatu poligon di katakan bebas jika tidak memenuhi
akhir - awal = - (n-2).180o ...(syarat sudut)
Xakhir – Xawal = d . sin ...(syarat absis)
Yakhir – Yawal = d . cos ...(syarat ordinat)
Syarat dalam adalah timbul dari bentuknya sendiri (syarat geometris), sedangkan syarat-syarat yang timbul karena pengikatan ke titik-titik tetap yang telah tertentu koordinatnya. poligon terbuka tidak memiliki satu syarat yang harus dipenuhi.
Dengan koreksi poligon dimaksudkan pembagian salah satu penutup koordinat fX dan
fY kepada unsur-unsur bersangkutan dalam bentuk koreksi-koreksi setelah perataan
sementara sudut. Cara dilakukan pembagian koreksi itu tergantung kepada perbandingan ketelitian ukuran sudut dengan ukuran jarak. Untuk itu ada tiga kemungkinan :
- ukuran sudut lebih teliti dari ukuran jarak (metode transit),
- ukuran sudut sama teliti dengan ukuran jarak (metode bowditch), - ukuran sudut lebih rendah ketelitiannya daripada ukuran jarak.
3. Triangulasi
Pada cara ini suatu titik dengan titik lainnya dihubungkan sehingga membentuk rangkaian segitiga atau jaring segitiga. Besaran-besaran yang diukur adalah setiap sudut dalam pada segitiga tersebut. Untuk keperluan tersebut perlu diketahui koordinat satu titik, jarak satu titik dan sudut jurusan. Triangulasi dapat diklasifikasikan sebagai berikut:
a. Primer b. Sekunder c. Tersier
15
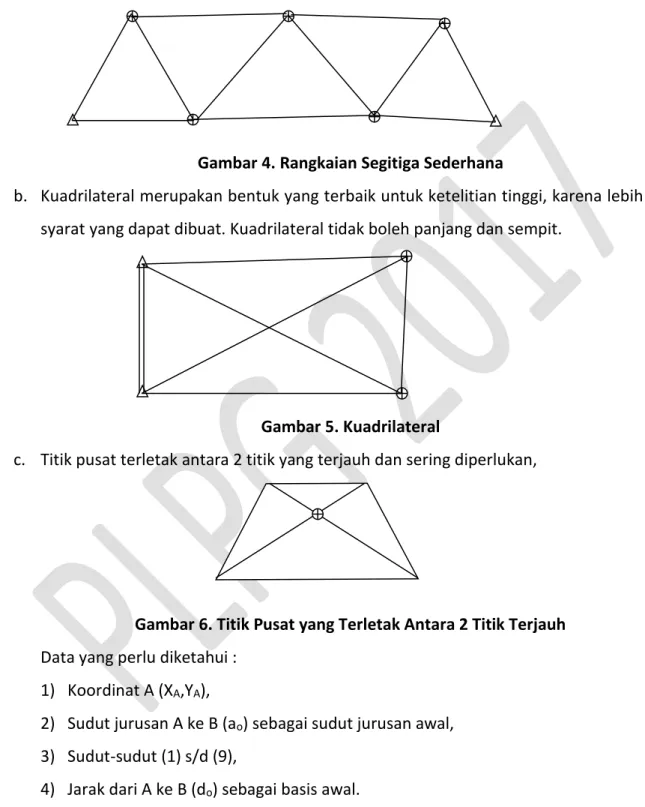
a. Rangkaian segitiga yang sederhana cocok untuk pekerjaan-pekerjaan dengan orde rendah untuk ini sedapat mungkin diusahakan sisi-sisi segitiga sama panjang.
Gambar 4. Rangkaian Segitiga Sederhana
b. Kuadrilateral merupakan bentuk yang terbaik untuk ketelitian tinggi, karena lebih banyak syarat yang dapat dibuat. Kuadrilateral tidak boleh panjang dan sempit.
Gambar 5. Kuadrilateral
c. Titik pusat terletak antara 2 titik yang terjauh dan sering diperlukan,
Gambar 6. Titik Pusat yang Terletak Antara 2 Titik Terjauh
Data yang perlu diketahui : 1) Koordinat A (XA,YA),
2) Sudut jurusan A ke B (ao) sebagai sudut jurusan awal,
3) Sudut-sudut (1) s/d (9),
4) Jarak dari A ke B (do) sebagai basis awal.
16
a. Pada masing-masing segitiga perlu diteliti, bahwa jumlah sudut dalam adalah 180o. Bila
hal ini tidak terpenuhi, maka pada masing-masing sudut dalam segitiga perlu diseri nilai koreksi sebesar 1/3 k1, yaitu K1 = [(1) + (2) + (3)]–180o dimana K1 adalah nilai koreksi sudut
segitiga.
b. Bila sisi-sisi luar rangkaian segitiga ditinjau sebagai 2 buah poligon, yaitu poligon atas A-C-D-E-H dengan B sebagai titik awal dan E sebagai titik akhir; kemudian poligon bawah B-A-F-G-H-E dengan A sebagai titik awal dan H sebagai titik akhir, maka setelah sudut jurusan pada setiap sisi tersebut dihitung haruslah memenuhi persyaratan utama poligon, yaitu sudut yang diukur = (aawal – aawal) + n.180o.
c. Jika sisi awal (dawal = AB) dan sisi akhir (dakhir = EH) diketahui, maka log sin aalas kiri - log
sin aalas kanan = log dakhir – log dawal.
d. Bila persyaratan tersebut tidak dapat segera dipenuhi oleh semua sudut, maka berilah nilai koreksi K2 pada masing-masing sudut.
e. Setelah semua sudut dikoreksi, maka panjang masing-masing sisi segitiga dapat diperoleh, dan bila diketahui aAB maka sudut-sudut jurusan semua sisi dapat pula dihitung.
Langkah-langkah Perhitungan
a. Hitung masing-masing t sudut dalam (1) s/d (9) dengan memperhatikan bahwa jumlah sudut dalam setiap segitiga A harus sama dengan 180o.
b. Menghitung sudut jurusan
Bila koordinat titiktitik B, C, F, G akan dihitung sebagai poligon tertutup A-B-C-G-F-A, mka sudut-sudut jurusan yang diperlukan adalah aBC, aCG, aGF ,
c. Menghitung jarak dBC, dCG, dGF dan dFA,
d. Menghitung koordinat. e. Kontrol :
Hitung kembali koordinat titik A (XA,YA) dengan rumus :
XA = XF + dFA . sin aFA
YA = YF + dFA . cos aFA
Hasil dari perhitungan koordinat titik A (XA,YA) tersebut harus sama dengan koordinat (XA,YA)
17
Pada cara jaring segitiga akan selalu diperoleh suatu titik sentral atau titik pusat. Pada titik pusat tersebut terdapat beberapa buah sudut yang jumlah sudut-sudutnya sama dengan 360o.
Oleh sebab itu setelah masing-masing sudut diberi koreksi K1, maka sudut-sudut yang
terdapat pada titik pusat tersebut perlu diteliti dengan memberi nilai koreksi K2. Kemudian
pada sudut-sudut yang tidak terletak pada titik pusat dari masing-masing segitiga diberi nilai koreksi K3, yaitu K3 = -1/2 K2.
Jika perhitungan jarak dimulai dari segitiga I yaitu panjang sisi AS, dan diakhiri pada segitiga IV dengan menggunakan rumus sinus sudut-sudut yang diukur, maka panjang sisi AS di segitiga I harus sama dengan panjang sisi AS pada segitiga VI. Sehingga titik A pada segitiga VI berimpit dengan titik A pada segitiga I.
Dan bila titik s dianggap sebagai titik puncak dari semua segitiga dan sisi-sisi yang berhadapan dengan titik S sebagai alas, maka persyaratan yang harus dipenuhi agar sisi AS pada segitiga + berimpit dengan AS segitiga VI adalah log . sin sudut-sudut alas kiri harus sama denganm log . sin sudut-sudut alas kanan.
Untuk memenuhi persyaratan diatas dan agar jumlah sudut pada setiap segitiga tetap 180o, maka setelah sudut-sudut tersebut diberi nilai koreksi K
1, K2 dan K3 perlu pula diberi nilai
koreksi K4, yaitu (+)K4 untuk sudut-sudut alas kiri dan K4 untuk sudut-sudut alas kanan.
Bila harus ditambahkan pada sudut AFA’ dan bila X adalah kenaikan harga log.sin X,
dan bila sudut bertambah dengan 1”, sehingga log.sin (X + p) = log.sinX + p.X. Setelah semua
sudut dikoreksi dengan nilai K1, K2, K3 dan K4, maka dengan menggunakan panjang sisi dan sudut jurusan yang diketahui dapat dihitung panjang masing-masing sisi segitiga dan sudut-sudut jurusan.
Dengan demikian koordinat masing-masing titik dari jaring segitiga dapat pula diketahui.
4. Cara Pengikat Kebelakang
Pada cara pengikat kebelakang, yang diukur adalah sudut-sudut yang ada di titik P yang akan dicari tempatnya. Apabila digunakan dua titik A (Xa, Yb) dan titik B (Xa, Ya) sebagai titik pengikat, maka yang diukur sekarang adalah sudut APB. Maka dari segitiga APB diketahui alas dab dan sudut puncaknya sudut APB = , jadi barulah dari segitiga APB diketahui alas dab dan
18 C H B A P
unsurnya, sehingga tidak dapat dilukiskan dan titik P belum dapat dipastikan tempat titik P, ialah tempat duduknya titik P. Untuk dengan pasti ditentukan tempat titik P dengan pasti dan diperlukan lagi satu titik tertentu, misalnya titik C (Xa ,Ya) dan sebagai alas digunakan sisi BPC dan perlu diukur sudut BPC = . Dengan demikian dapat dilukiskan tempat kedudukan untuk titik P. Titik P menjadi titik potong dua tempat kedudukan itu. Tempat kedudukan pertama adalah unsur lingkaran dari lingkaran yang melalui titik-titik A (Xa, Ya) dan B (Xb, Yb), sedang tempat kedudukan yang kedua adalah unsur lingkaran yang melalui titik-titik B (Xa, Ya) dan C (Xc, Yc).
a. Metode Collins: menggunakan 1 lingkaran
Untuk menentukan koordinat P dari A, B dan C dipergunakan perpotongan ke belakang secara numeris Collins dan cara grafis,
Gambar 7. Pengikatan ke Belakang Metode Collins
Lingkaran melalui A, B dan P memotong garis PC di H, yang selanjutnya disebut titik penolong Collins. Titik penolong Collins ini dapat pula terletak pada garis PB atau PA. Masing-masing lingkaran melalui titik A, C dan P serta melalui titik B, C dan P dengan data pada segitiga ABH dapat dicari koordinat titik H. Metode Collins dapat digunakan jika titik yang ingin diketahui terpisah dengan titik ikatnya karena halangan sungai atau jurang. Pengolahan data pengukuran pengikatan ke belakang Metode Collins
1. Menghitung dAB dan BA
19
AB = Tan-1 [(XB – XA)/(YB – YA)] ; dAB = [(XB – XA)2 + (YB – YA)2]1/2 ; BA = AB + 1800
2. Menghitung AH, dAH dan BH, dBH
AH = AB - ; dAH = (dAB/sin ). Sin (1800--)
BH = BA + (1800--) ; dBH = (dAB/sin ). Sin
3. Menghitung koordinat titik bantu penolong Collins dari A, B dan rata-rata XHA = XA + dAH.sin AH ; YHA = YA + dAH.cosAH
XHB = XB + dBH.sin BH ; YHB = YB + dBH.cosBH
XH = (XHA + XHB)/2 ; YH = (YHA + YHB)/2
4. Menghitung HC untuk mendapatkan PC (karena sudut sehadap)
HC = Tan-1 [(XC – XH)/(YC – YH) maka PC = HC
5. Menghitung PA dan PB
PA = PC + + ; PB = PC +
6. Menghitung AP, dAP dan BP , dBP
AP = PA – 1800 ; dAP = (dAB/sin ). Sin (BP - BA)
BP = PB – 1800 ; dBP = (dAB/sin ). Sin (AB - AP)
7. Menghitung koordinat titik P dari A, B dan rata-rata XPA = XA + dAP . sin AP ; YPA = YA + dAP . cos AP
XPB = XB + dBP . sin BP ; YPB = YB + dBP . cos BP
20
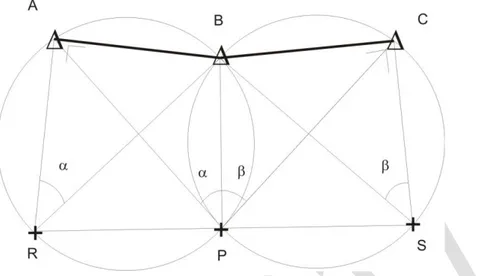
b. Metode Cassini : mengunakan dua lingkaran,
Gambar 8. Pengikatan ke Belakang Metode Cassini
Output koordinat planimetris Y ( X,Y ) banyak titik. Pada cara hitungan cassini diperlukan dua tempat kedudukan, yang diperlukan untuk menentukan titik P yang diikat pada titik A, B dan C. Cassini membuat gasir yang melalui titik A tegak lurus pada AB dan garis ini memotong tempat kedudukan yang melalui A dan B di titik R, demikian pula dibuat garis lurus di titik C tegak lurus pada AB dan garis ini memotong tempat kedudukan yang melalui B dan C di titik S. Hubungkanlah sekarang R dengan P dan S dengan P. karena BAR = 90, maka garis BR menjadi garis tengah lingkaran, jadi BPR = 90 pula. Dan BS merupakan pula garis tengah lingkaran, hingga BPS = 90. Karena BPR = 90 dan BPS = 90, maka titik R, P dan S akan letak di satu garis lurus. Titik-titik R dan S dinamakan titik-titik penolong Cassini.
Mencari AB, dAB, BA dan BC, dBC, CB
AB = Tan-1 [(XB-XA)/(YB-YA) ; dAB = [(XB-XA)2+(YB-YA)]1/2 ; BA = AB + 180o
BC = Tan-1[(XD-XC)/(YD-YC)] ; dBC = [(XC-XB)2+(YC-YB)2]1/2 ; CB = BC + 180o
Mencari AR, dAR dan BR, dBR
AR = AB + 90o ; dAR = (dAB/sin). Sin(90-) ; BR = BA–(90o-) ; dBR =(dAB/sin). Sin 90o
Mencari koordinat XR dan YR dari titik A dan B dan rata-rata
XRA = XA + dAR.sin AR ; YRA = YA + dAR.cos AR ; XRB = XB + dBR.sin BR ; YRB = YB + dBR.cos BR
21
Mencari koordinat XS dan YS dari titik B dan C dan rata-rata
XSB = XB + dBS.sin BS ; YSB = YB + dBS.cos BS ; XSC = XC + dCS.sin CS ; YSC = YC + dCS.cos CS
XS = (XSB + XSC)/2 ; YS = (YSB + YSC)/2
Mencari RS, PS, PA, PB, PC
RS = Tan-1 [(XS-XR)/(YS-YR)]1/2 ; PS = RS (sehadap)
PA = PS + (90o-) ; PB = PA + = PS + 90o ; PC = PB + + = PS + 90o +
Mencari AP, BP,CP
AP = PA + 180o – 360o ; BP = PB + 180o ; CP = PC + 180o
Mencari dAP, dBP,dCP
dAP = (dAB/sin ).sin (BA-BP) ; dBP = (dAB/sin ).sin (AP-AB) ; dCP = (dBC/sin ).sin (BP-BC)
Mencari koordinat XP dan Yp dari titik A, B, C dan rata-ratanya
XPA = XA + dAP. sin AP ; YPA = YA + dAP.cos AP
XPB = XB + dBP. sin BP ; YPB = YB + dBP.cos BP
XPC = XC + dCP. sin CP ; YPC = YC + dCP.cos CP
XP = (XPA + XPB + XPC)/3 ; YP = (YPA + YPB + YPC)/3
C. Pengukuran Titik–titik Detail
Salah satu unsur penting pada peta topografi adalah unsur ketinggian yang biasanya disajikan dalam bentuk garis kontur. Menggunakan pengukuran cara tachymetri, selain diperoleh unsur jarak, juga diperoleh beda tinggi. Bila theodolite yang digunakan untuk pengukuran cara tachymetri juga dilengkapi dengan kompas, maka sekaligus bisa dilakukan pengukuran untuk pengukuran detail topografi dan pengukuran untuk pembuatan kerangka peta pembantu pada pengukuran dengan kawasan yang luas secara efektif dan efisien.
Alat ukur yang digunakan pada pengukuran untuk pembuatan peta topografi cara tachymetry menggunakan theodolite berkompas adalah : theodolite berkompas lengkap dengan statif dan unting-unting, rambu ukur yang dilengkapi dengan nivo kotak dan pita ukur untuk mengukur tinggi alat.
Data yang harus diamati dari tempat berdiri alat ke titik bidik menggunakan peralatan ini meliputi : azimuth magnit, benang atas, tengah dan bawah pada rambu yang berdiri di atas
22
titik bidik, sudut miring, dan tinggi alat ukur di atas titik tempat berdiri alat.. Keseluruhan data ini dicatat dalam satu buku ukur,
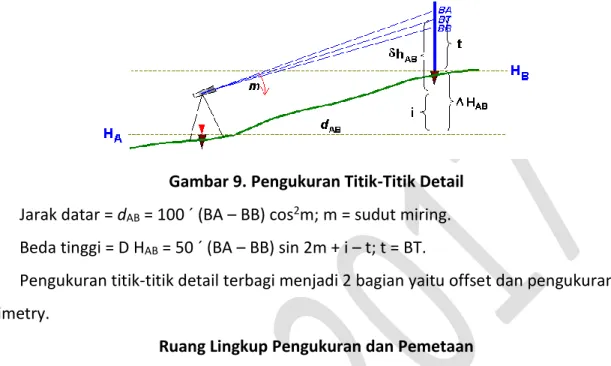
Gambar 9. Pengukuran Titik-Titik Detail
Jarak datar = dAB = 100 ´ (BA – BB) cos2m; m = sudut miring.
Beda tinggi = D HAB = 50 ´ (BA – BB) sin 2m + i – t; t = BT.
Pengukuran titik-titik detail terbagi menjadi 2 bagian yaitu offset dan pengukuran tachimetry.
Ruang Lingkup Pengukuran dan Pemetaan
Pengukuran dilakukan di atas permukaan bumi untuk dipetakan di atas bidang 2 dimensi. Bentuk bumi awalnya diwakili oleh bentuk jeruk lemon. Para insinyur dan ilmuwan membutuhkan suatu bentuk yang teratur untuk mewakili bentuk bumi sehingga bentuk jeruk lemon digantikan oleh bentuk bola. Fakta di lapangan menunjukkan rotasi bumi terhadap sumbu putarnya menimbulkan pemepatan pada kutub-kutubnya karena gaya centrifugal yang terjadi sehingga jari-jari bumi ke kutub kurang dari pada jari-jari bumi ke ekuator. Bentuk bola kemudian digantikan oleh bentuk ellips putar dengan sumbu pendeknya ke arah kutub-kutub sedangkan sumbu panjangnya ke arah ekuator, yang dinamakan dengan ellipsoida.
Bentuk bumi dapat pula diwakili oleh permukaan air laut yang melingkupi seluruh dunia. Bentuk bumi yang diwakili oleh permukaan air laut dinamakan geoid atau bidang nivo yang mewakili bentuk bumi. Bidang nivo adalah bidang yang memiliki energi potensial yang sama.
Pekerjaan-pekerjaan pada pengukuran dan pemetaan terdiri dari : (1) Pengukuran kerangka dasar vertikal,
(2) Pengukuran kerangka dasar horisontal dan (3) Pengukuran titik-titik detail.
23
(1) Pengukuran sipat datar kerangka dasar vertikal (2) Pengukuran trigonometris kerangka dasar vertikal (3) Pengukuran barometeris kerangka dasar vertikal.
Pengukuran kerangka dasar horisontal terdiri dari :
(1) Pengukuran titik tunggal (pengikatan ke muka, pengikatan ke belakang metode Collins dan pengikatan ke belakang Metode Cassini)
(2) Pengukuran banyak titik (triangulasi, trilaterasi, triangulaterasi, kuadrilateral, poligon) Pengukuran titik-titik detail
(1) Pengukuran metode offset (menggunakan alat-alat sederhana) (2) Pengukuran metode tachymetri (optis, elektronis digital)
Pengukuran poligon dapat dikelompokkan berdasarkan :
(1) Visual (poligon terbuka, poligon tertutup dan poligon bercabang)
(2) Geometrik (poligon terikat sempurna, poligon terikat sebagian-terikat sudut saja atau terikat koordinat saja dan poligon bebas-tidak terikat)
Kesalahan pada Pengukuran dan Pemetaan
Kesalahan pada pengukuran dan pemetaan dapat terjadi karena :
(2) Kesalahan sistematis, kesalahan yang terjadi karena sistem alam dan sistem peralatan. (3) Kesalahan acak, kesalahan yang terjadi karena keterbatasan panca indera manusia.
(4) Kesalahan besar (blunder) kesalahan yang tidak boleh terjadi, karena salah menulis, salah membaca dan salah mendengar.
Eliminasi kesalahan sistematis pada pengukuran sipat datar kerangka dasar vertikal karena sistem alat adalah dengan cara pengukuran KGB (kesalahan garis bidik) yang diperoleh dengan cara melakukan pembacaan BA, BT dan BB rambu belakang dan rambu muka serta jarak belakang dan muka horisontal (db dan dm) pada 2 kali alat berdiri (2 stand) yaitu stand 1
dan stand 2. Eliminasi kesalahan sistematis pada pengukuran sipat datar kerangka dasar vertikal karena sistem alam adalah dengan cara (1) Jumlah slag dibuat genap – 1 slag diapit oleh rambu belakang dan muka, (2) Jarak belakang horisontal (db) dan jarak muka horisontal
(dm) dibuat hampir sama dan (3) Bacaan rambu ukur belakang dan muka, 0,30 meter < BA, BT,
24
Eliminasi kesalahan sistematis pada pengukuran poligon karena sistem alat theodolite adalah dengan melakukan pembacaan sudut horisontal pada posisi teropong biasa (vizier atau pembidiknya di atas atau mikrometer di sebelah kanan surveyor) dan posisi teropong luar biasa (vizier atau pembidik di bawah atau mikrometer di sebelah kiri surveyor). Urutan pembacaan adalah (1) sudut horisontal biasa kiri, (2) sudut horisontal biasa kanan, (3) sudut horisontal luar biasa kanan dan (4) sudut horisontal luar biasa kiri.