BAB III
PERANCANGAN ALAT
Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta
perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan GUI
matlab.
3.1. Gambaran Alat
Alat yang akan direalisasikan dalam skripsi ini adalah sebuah trainer kendali kecepatan
motor DC menggunakan kendali PID dan GUI matlab. Trainer tersebut berbentuk kotak (box)
yang berukuran (43×31×15)cm. Dalam box trainer tersebut terdapat 4 potensiometer sebagai
pengatur setpoint, Kp, Ki, dan Kd. Selain potensiometer terdapat saklar on / off trainer, switch
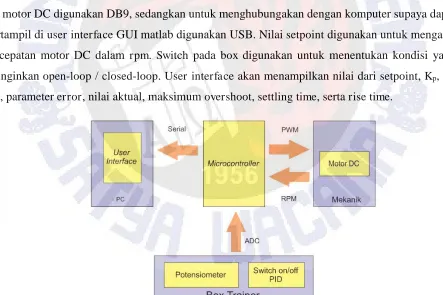
open-loop / closed-loop beserta alur rangkaian open-loop dan closed-loop. Untuk menghubungkan box
ke motor DC digunakan DB9, sedangkan untuk menghubungakan dengan komputer supaya dapat
tertampil di user interface GUI matlab digunakan USB. Nilai setpoint digunakan untuk mengatur
kecepatan motor DC dalam rpm. Switch pada box digunakan untuk menentukan kondisi yang
diinginkan open-loop / closed-loop. User interface akan menampilkan nilai dari setpoint, Kp, Ki,
Kd, parameter error, nilai aktual, maksimum overshoot,settling time, serta rise time.
Gambar 3.1 Blok Diagram Keseluruhan Alat
Pada Gambar 3.1 menunjukkan blok diagram keseluruhan yang dirancang. Terdapat
3.2. Perancangan dan Realisasi Perangkat Keras
Pada bagian tersebut akan diuraikan dari perancangan hingga realisasi perangkat keras.
Perancangan perangkat keras meliputi realisasi alat modult mekanik, elektronik maupun controller.
3.2.1. Perangkat Keras Modul Mekanik
3.2.1.1. Box Trainer
Pada bagian ini akan dijelaskan mengenai perancangan modul mekanik. Akan ditampilkan
bagian-bagian pada tiap komponen yang terdapat pada modul mekanik. Rancangan desain
tampak dari depan sehingga dapat mengetahui fitur maupun bagiannya.
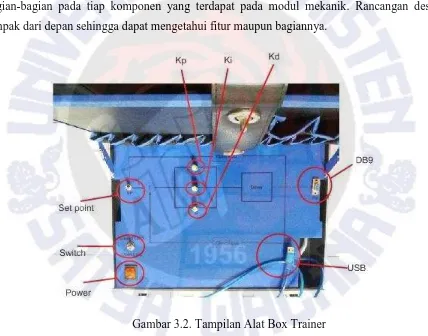
Gambar 3.2. Tampilan Alat Box Trainer
Berikut fungsi masing-masing bagian pada bagian modul mekanik:
1. Setpoint digunakan untuk mengatur besar kecepatan (rpm) yang diinginkan.
2. Kp untuk mengatur besar nilai propotional.
3. Ki untuk mengatur besar nilai integral.
4. Kd untuk mengatur besar nilai derivative.
6. Power untuk menghidupkan box trainer.
7. DB9 digunakan untuk menghubungkan motor dengan box trainer.
8. Kabel USB digunakan untuk menghubungkan mikrokontroller dengan pc untuk
komunikasi serial.
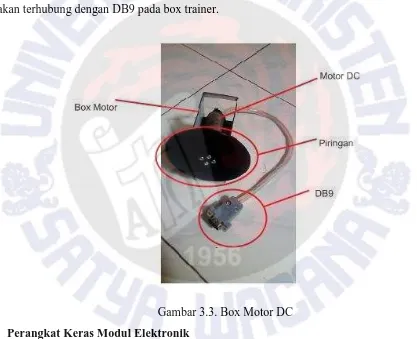
3.2.1.2. Motor DC Pololu with Rotary Encoder
Motor DC pada perancangan terlatak pada didalam box motor. Box motor tersebut
berukuran 4.5cm × 7cm × 9cm sehingga dapat disimpan pada ruang kosong yang telah disedikan
pada box trainer dikanan pojok bawah. Kemudian terdapat kabel DB9 pada motor sepanjang 32cm
yang akan terhubung dengan DB9 pada box trainer.
Gambar 3.3. Box Motor DC
3.2.2. Perangkat Keras Modul Elektronik
Pada bagian ini akan dijelaskan penggunaan modul elektronik yang digunakan dalam
skripsi ini.
3.2.2.1. Pengendali Utama
Bagian pada pengendali utama yaitu mikrokontroller sebagai pusat pengolahan data dan
tersebut adalah sebagai pusat pengolahan nilai. Seperti mengatur nilai setpoint, Kp, Ki, Kd,
membaca kondisi PID on atau off, maupun menerima inputan dari nilai rotary encoder pada motor
DC. Serta Arduino berfungsi sebagai komunikasi serial ke pc untuk ditampilkan dalam user
interface.
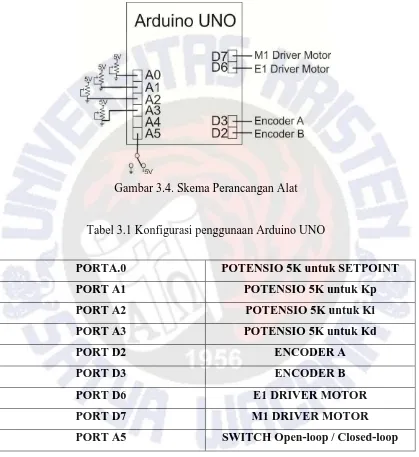
Gambar 3.4. Skema Perancangan Alat
Tabel 3.1 Konfigurasi penggunaan Arduino UNO
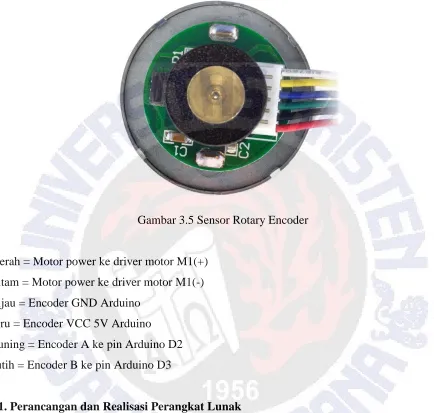
3.2.2.2. Sensor Rotary Encoder
Sensor rotary encoder merupakan sensor dengan hall effect. Sensor tersebut menjadi satu
dengan motor pololu yang digunakan. Fungsi dari sensor tersebut adalah sebagai penghitung
kecepatan motor pololu yang tentunya sudah diprogram agar perhitungan nilai rpm dapat
PORTA.0 POTENSIO 5K untuk SETPOINT
PORT A1 POTENSIO 5K untuk Kp
PORT A2 POTENSIO 5K untuk Ki
PORT A3 POTENSIO 5K untuk Kd
PORT D2 ENCODER A
PORT D3 ENCODER B
PORT D6 E1 DRIVER MOTOR
PORT D7 M1 DRIVER MOTOR
terdeteksi dengan benar. Untuk menguji akurasi rotary encoder, maka digunakan tachometer
digital Lutron DT-1236L.
Gambar 3.5 Sensor Rotary Encoder
Merah = Motor power ke driver motor M1(+)
Hitam = Motor power ke driver motor M1(-)
Hijau = Encoder GND Arduino
Biru = Encoder VCC 5V Arduino
Kuning = Encoder A ke pin Arduino D2
Putih = Encoder B ke pin Arduino D3
3.1. Perancangan dan Realisasi Perangkat Lunak
Pada perancangan perangkat lunak ini terdapat dua bagian yaitu pada mikrokontroller dan
user interface.
3.1.1. Perangkat Lunak mikrokontroller
Perangkat lunak mikrokontroller berfungsi untuk pengolahan data. Dan pada bagian ini
akan dijelaskan percancacngan mikrokontroller dalam skripsi ini. Terdapat bagian sebagai
controller, bagian pengiriman data ke user interface, dan bagian penerimaan data dari sensor
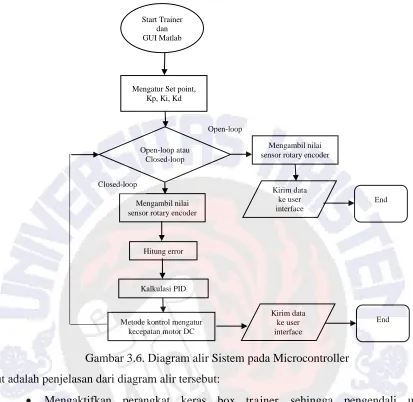
Gambar 3.6. Diagram alir Sistem pada Microcontroller
Berikut adalah penjelasan dari diagram alir tersebut:
Mengaktifkan perangkat keras box trainer sehingga pengendali utama
mikrokontroller aktif dan user interface GUI matlab maka akan terkoneksi dengan
trainer.
Kita mengatur dahulu Setpoint kemudian terdapat switch open-loop dan closed-loop.
Ketika kondisi open-loop maka GUI matlab menerima inputan dari motor nilai rpm dan menghitung error.
Untuk kondisi closed-loop maka kita dapat mengatur terlebih dahulu nilai Kp, Ki,
Kdmelalui potentiometer pada trainer kemudian kita jalankan pada GUI matlab.
digunakan untuk menghitung MV, sehingga didapatkan MV = (Kp x error) + (Ki
x sum of error) + (Kd x (error – last error)) [4].
Nilai MV yang didapatkan kemudian digunakan untuk mengatur pulsa input motor DC yang akan mengatur kecepatan motor DC.
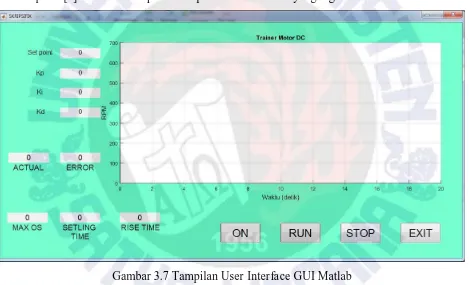
3.1.2. User Interface GUI Matlab R2015a
Pengendali Motor DC akan dilengkapi dengan program user interface berupa GUI Matlab.
Dalam user interface tersebut digunakan untuk menampilkan nilai dari setpoint, Kp, Ki, dan Kd,
error, rise time, maximum OS dan settling time. Selain itu terdapat grafik kecepatan aktual dan
nilai setpoint [5]. Berikut merupakan tampilan user interface yang digunakan:
Gambar 3.7 Tampilan User Interface GUI Matlab
Pada Gambar 3.6 menunjukkan user interface yang akan digunakan. User interface
tersebut dapat menampilkan nilai-nilai dari setpoint, Kp, Ki, Kd yang diubah melalui potentiometer
yang terdapat pada box trainer. Kemudian grafik akan menampilkan kecepatan aktual serta nilai