TE091403
Institut Teknologi Sepuluh Nopember
Mesin Arus Bolak balik
ke- Dasar Materi Pokok Indikator keberhasilan materi
13-16 Memahami Motor Induksi
1. Fitur mesin induksi tiga fasa
2. Sistem kemagnitan dalam m.i. tiga fasa
3. medan putar
4. tegangan induksi pada kumparan stator dan rotor 5. rangkaian ekivalen
6. penentuan parameter 7. aliran daya dalam m.i. 8. pembentukan torka 9. dinamika sistem 10. m.i. tipe sangkar
11. pengaturan arus dan torka mula dalam motor
sangkar 12. torka parasit
1. Menjelaskan prinsip kerja motor induksi. 2. Menjelaskan
rangkaian ekivalen motor induksi. 3. Menjelaskan daya
dan torsi.
4. Menjelaskan macam-macam motor
induksi.
5. Menjelaskan prinsip kerja genera-tor induksi
6. Menjelaskan
pengaturan putaran.
Fakta umum mengenai motor Induksi
•
Motor induksi dapat digunakan sebagai
motor dan generator. Namun umumnya
digunakan sebagai motor. Mesin ini
adalah salah satu pilar utama di industri
•
Umumnya yang digunakan di industri
adalah tipe rotor sangkar.
•
Baik mesin yang tiga phasa ataupun satu
phasa sangat umum digunakan.
•
Generator induksi sangat jarang
digunakan. Umumnya diaplikasikan pada
pembangkit listrik tenaga angin.
•
Kontruksi stator
– Inti besi berlaminasi dengan slot
– Koil ditempatkan pada slot yang ada untuk membentuk kumparan satu atau tiga phasa.
•
Kontruksi rotor sangkar bajing.
– Inti besi berlaminasi dengan slot.
– Batang konduktor disambungkan terpasang dalam slot
– Dua cincin menghubung singkatkan batang konduktor
Kontruksi
• Stator mempunyai inti besi berlaminasi berbentuk cincin dengan slot
• Kumparan tiga atau satu phasa ditempatkan pada slot
• Rotor mempunyai inti besi berlaminasi yang berbentuk
cincin, dengan slot digabungkan dengan poros/shaft.
• Rotor sangkar bajing: Batang
konduktor ditempatkan dalam slot dan dihubungsingkatkan pada kedua sisi (paling banyak
digunakan).
Konsep motor sangkar bajing
A
-Stator with
laminated
iron-core
Slots with
winding
Squirrel cage
Rotor
Bars
Kontruksi
Rotor-belit:
• Belitan tiga phasa ditempatkan pada slot.
• Kumparan dikoneksikan wye atau delta.
• Ujung tiap phasa dihubungkan
dengan cincin geser atau slip ring. • Tiga sikat/brushes terhubung
dengan tiga cincin geser/slip-rings. • Belitan rotor mungkin di bebani
dengan resistor variable atau
disuplay dengan sumber tegangan terpisah.
Konsep motor rotor belit
A
-Stator with
laminated
iron-core
Slots with
winding
Slip
rings
Three phase
winding
Laminated core
with slots
Kontruksi stator
• Gambar disamping menunjukkan bentuk umum inti stator
• Inti besi betuk cincin yang berlaminasi disatukan/bolted dengan frame motor.
• Koil ditempatkan dalam slot. The slots are closed by a wedge.
• Ujung koil dibentuk kompak melekat pada inti besi dan diikat bersama dengan pengikat.
• Koil motor tegangan tinggi diisolasi dengan metode “dried and impregnated”.
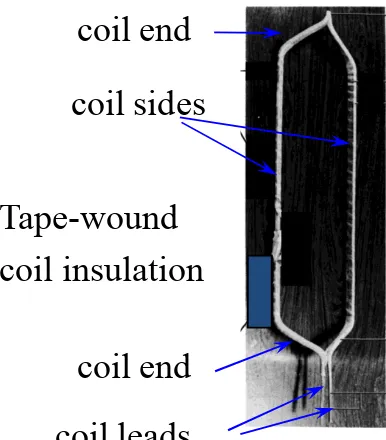
Kontruksi stator
•
Gambar disamping menunjukan
bentuk
umum
kontruksi
koil
stator.
•
Koil
digulung
dan
dibentuk
menggunakan
konduktor
tembaga yang berisolasi.
•
Koil juga diisolasi menggunakan
insulating tape.
•
Koil
yang
sudah
di
isolasi
ditempatkan pada slot stator.
•
Dua sisi koil mempunyai beda
sudut listrik sekitar 180
o.
Kontriksi belitan stator
Tape-wound coil insulation
Tape-wound
coil insulation
coil end
coil end
coil sides
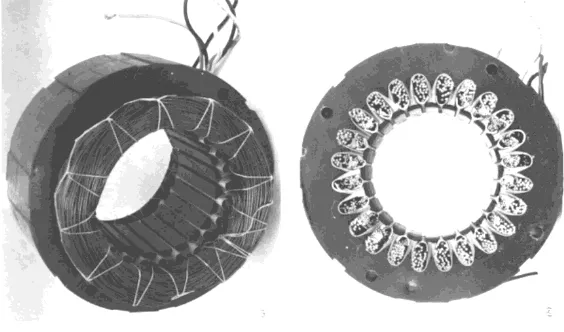
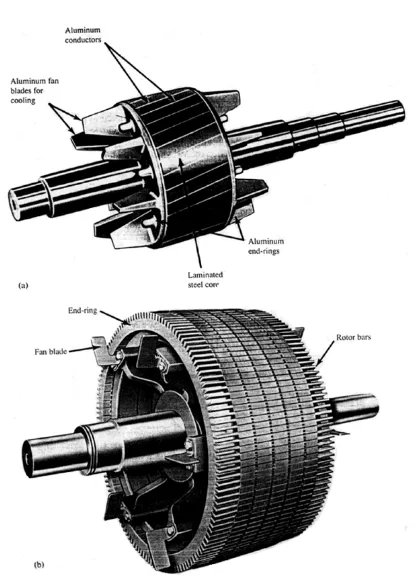
Rotor sangkat bajing
• Gambar disamping menunjukkan bentuk rotor untuk motor kecil dan besar.
• Kedua rotor mempunyai inti berlaminasi dengan slot, yang digabungkan dengan shaft.
• Bar aluminium sedikit dimiringkan/dipilin pada rotor kecil. Hal ini mengurangi kebisingan dan meningkatkan kinerja. • Sirip ditempatkan pada cincin untuk
menghubung singkatkan batang rotor. Sirip bekerja sebagai kipas dan untuk meningkatkan pendinginan.
• Rotor besar juga memiliki sirip dan bar. Tapi bar tidak miring.
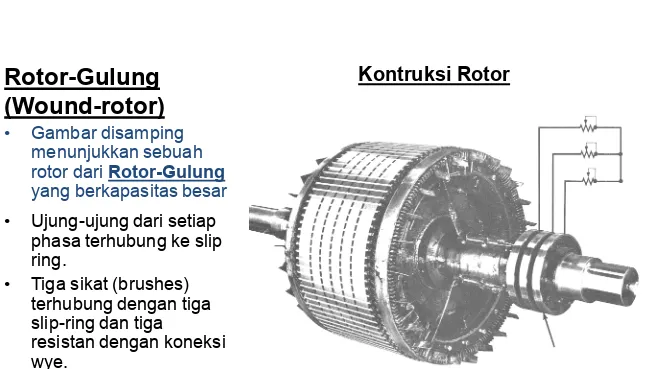
Rotor-Gulung
(Wound-rotor)
•
Gambar disamping
menunjukkan sebuah
rotor dari
Rotor-Gulung
yang berkapasitas besar
•
Ujung-ujung dari setiap
phasa terhubung ke slip
ring.
•
Tiga sikat (brushes)
terhubung dengan tiga
slip-ring dan tiga
resistan dengan koneksi
wye.
Prinsip operasi
•
Stator disuplai oleh tegangan tiga fase yang mensuplai arus tiga
fase seimbang yang mengalir melalui gulungan.
•
Arus tiga-fase menghasilkan medan magnet berputar.
•
Medan ini berputar pada kecepatan sinkron. Kecepatan sinkron
ditentukan oleh frekuensi dari tegangan suplai dan jumlah kutub:
ns = f/p/2 = 2f/p. Unit ini dalam rpm.
•
Medan berputar menginduksi tegangan di konduktor rotor yang
dihubung-singkatkan.
Prinsip operasi
•
Interaksi antara arus rotor dan medan stator menghasilkan gaya yang
menggerakkan motor: Gaya = BIL sin f.
•
Besarnya tegangan induksi tergantung pada perbedaan kecepatan antara
medan putar stator dan rotor.
•
Perbedaan kecepatan maksimum terjadi pada saat starting ketika motor
menarik arus yang besar. Frekuensi arus rotor adalah 60 Hz ketika rotor
stasioner.
•
Pada saat motor mulai berputar perbedaan kecepatan berkurang, yang
menghasilkan:
9
reduksi frekuensi pada tegangan induksi di rotor.
Terbangkitkannya Gaya.
•
Medan putar
menginduksi arus di
Bar.
•
Arus dan medan
berinteraksi
menghasilkan gaya
gerak
Gaya = B
rotatingL I
r•
Gaya menggerakkan
motor.
•
L adalah panjang rotor
Force
B
rotatingPrinsip Operasi
•
Jika kecepatan rotor sama dengan kecepatan sudut medan stator,
tegangan induksi, arus dan torsi menjadi nol. Oleh karena itu
kecepatan motor harus kurang dari kecepatan sinkron.
•
Operasi motor membutuhkan perbedaan kecepatan antara medan
putar yang dihasilkan stator dan kecepatan rotor yang sebenarnya.
Perbedaan kecepatan disebut slip (s) dan didefinisikan sebagai:
s = (n
s- n
r) / n
sdimana n
s= 2 f / p
•
Frequency arus rotor adalah: f
r= s f
Motor Induksi tiga phasa, 20 hp, 208 V, 60 Hz, 6 kutub, dikoneksikan
wye.
Motor megeluarkan daya 15 kW pada slip 5%.
Hitunglah:
a) Kecepatan sinkron.
b) Kecepatan rotor.
c) Frekuensi dari arus rotor.
Jawaban
- Kecepetan sinkron:
n
s= 2 f / p = (120) / 6 = 20 rev/sec = 1200 rpm
- Kecepetan rotor:
n
r= (1-s) n
s= (1- 0.05) (1200) = 1140 rpm
Penurunan rangkaian ekivalen.
•
Motor induksi terdiri dari dua sistem magnet yang terhubung : Stator dan
Rotor
•
Tegangan sumber (V
1) pada phase A sama dengan penjumlahan dari
– tegangan induksi (E
1).
– Tegangan drop pada resistansi stator (I
1R
1).
Penurunan rangkaian ekivalen.
•
Semakin besar kecepatan relative (perbedaan) antara medan magnet rotor
danstator, maka makin besar tegangan rotor yang dihasilkan E
2.
•
Tegangan paling besar E
2terjadi pada saat rotor di blok atau ditahan
(mengapa?) yang disebut dengan E
2O. Pada slip tertentu :
Penurunan rangkaian ekivalen.
•
Jika semua paramenter mengacu pada
sisi stator, dimana :
a = rasio jumlah belitan (efektif) antara stator dan rotor
R’
2= Resistansi rotor dengan mengacu pada stator
X’
20= Reaktansi rotor (pada blocked rotor) mengacu pada stator
Penurunan rangkaian ekivalen.
•
R
2dan X
20sangat sulit (atau tidakmungkin) di hitung langsung dari rotor
sangkar, begitu juga “a”. Tetapi kira bisa mendapatkan-nya dari
Motor tiga phasa. Penurunan rangkaian ekivalen.
•
Rangkaian ekivalen motor induksi dapat disederhanakan dengan
memindahkan cabang magnetisasi ke sisi tegangan suplai, dan membagi
resistansi rotor menjadi dua bagian :R’
2/ s = R’
2+ R’
2(1-s) / s.
•
Resistansi yang pertama merepresentasikan rugi tembaga dalam rotor.
Bagian yang kedua merepresentasikan daya yang dibangkitkan motor
(electric developed motor power).
Electric Developed
Power
Rotor
Perhitungan parameter dari hasil test
Parameter motor dihitung dari tiga macam test, yaitu :
1.
Test tanpa beban (No-load test)
. Menghasilkan reaktansi magnetisasi dan
reistansi inti ( R
cdan X
m).
2.
Test rotor ditahan (Blocked-Rotor Test)
atau (Short circuit test).
menghasilkan (R
1+R’
2) dan (X
1+X’
2).
Perhitungan parameter dari hasil test
Pengukuran resistansi DC stator
–
Motor disupplay dengan tegangan DC di dua terminalnya (digambar
pada titik A dan B)
–
Tegangan dan arus DC diukur
–
Resistansinya adalah
Perhitungan parameter dari hasil test • Test tanpa beban
– Motor di suplai dengan tegangan rating (Vml) , kemudian arus Inl dan daya tanpa beban diukur Pnl .
– Daya tanpa beban meliputi rugi magnetisasi dan rugi putaran.
– Dengan menggunakan hasil pengukuran, admitansi dan resistansi dihitung. Jika impedansi bocor diabaikan, maka :
P
in= V
1.I
1.cos
j
Y = I / V
Perhitungan parameter dari hasil test
•
Test rotor ditahan (Blocked-Rotor Test)
–
Motor disuplai dengan tegangan yang direduksi V
1dan frekuensi yang
lebih rendah. Frekuensi yg direduksi digunakan agar frekuensi arus
rotor menjadi kecil pada kondisi operasi normal.
–
Tegangan V
br, arus I
br, daya input P
b rdiukur dan dicatat.
Perhitungan parameter dari hasil test
•
Test rotor ditahan (Blocked-Rotor Test)
Perhitungan parameter dari hasil test
•
Test rotor ditahan (Blocked-Rotor Test)
–
Reaktansi rotor pada frekuensi penge-test-an f
testadalah:
–
Reaktansi pada saat rotor ditahan dengan dasar frekuensi rating adalah:
X
br= X
br, test(f
rated/ f
test)
–
Parameter rangkaian ekivalen dihitung dari:
R
br= R
1+ R’
2and
X
br= X
1+ X’
2–
R
1dihitung dengan mengukur resistansi stator.
2 br 2
br test
br
Z
R
Perhitungan parameter dari penge-test-an
Mesin induksi tiga-phasa, 30 hp, 208 V, 4 kutub, 60 Hz, dikoneksikan wye
telah ditest dan menghasilkan data test sebagai berikut:
- Tanpa beban pada 60 Hz: V
nl= 208 V ; I
nl=22 A ; P
nl= 1600 W
- Rotor ditahan pada 15 Hz: V
br= 21 V ;I
br=71 A ; P
br= 2100 W
- DC test :
V
dc= 12 V ; I
dc=75 A
a) Hitunglah:
–
parameter rangkaian ekivalen
–
Rugi putar (rotational losses)
• Kinerja/performance motor induksi dapat di evaluasi menggunakan rangkaian ekivalennya.
Krakteristik Torsi Vs Kecepatan
Torsi induksi pada motor dinyatakan sebagai berikut:
Krakteristik Torsi Vs Kecepatan
Since Xm>>X1 and Xm>>R1 then
Krakteristik Torsi Vs Kecepatan
Karena Xm>>X1 dan Xm+X1>>R1 maka :
Krakteristik Torsi Vs Kecepatan
Torsi induksi pada rotor adalah
Krakteristik Torsi Vs Kecepatan
Persamaan diatas dapat di
Torsi maksimum motor Induksi
Dari rangkaian ekivalen, daya maksimum yang ditransfer dapat
dicapai ketika R’
2sama dengan impedansi dibagian kiri
(
)
2Dengan mensubstitusikan ke persamaan torsi
Motor
Klass
Description
X1
X2
A
Normal starting Torque,
normal starting current
0.5
0.5
B
Normal starting Torque,
Low starting current
0.4
0.6
C
High starting Torque,
Low starting current
0.3
0.7
D
High starting Torque,
High Slip
0.5
0.5
Rotor
Mengapa kita perlu mengatur motor induksi?
Terdapat beberapa teknik pengaturan (kecepatan) pada motor induksi:
1.
Pengubahan inti
2.
Pengaturan frekuensi sumber
3.
Pengaturan tegangan sumber
4.
Pengaturan resistansi rotor (hanya untuk rotor gulung)
Pole changing derives three control of Induction Motor : A) Constant Torque
Efek penggunaan rangka ganda (Double Cage)
Ketika rotor berputar pada kecepatan rendah, frekuensi arus yang mengalir
pada batang rotor menjadi tinggi. Begitu pula sebaliknya.
Efek pemilinan (pemiringan)
batang rotor
Rotor sangkar dipilin/dimiringkan
untuk mengurangi tegangan
induksi pada rotor, sehingga arus
hubung singkat (pada slip 1)
Motor satu phasa sering disebut sebagai fractional hp motor
karena rating dayanya yang kecil.
Motor satu phasa paling sering digunakan untuk lemari es,
mesin cuci, jam, kompresor, pompa, dll
•
Kumparan utama disuplai oleh sumber
satu phasa yang menghasilkan medan
magnet berdenyut atau berbentu pulsa.
•
Medan magnet berpulsa dibagi menjadi
dua medan, berputar dengan arah yang
berlawanan.
•
Interaksi antara medan dan arus yang
terinduksi di batang rotor menghasilkan
torsi yang berlawanan.
•
Dengan kondisi ini, motor belum akan
dapat berputar, seperti yang ditunjukkan
pada gambar.
Main
winding
+
_
+
ω
t
-
ω
t
Konsep kerja motor satu phasa.
•
Diasumsikan, motor di star dengan torsi luar dan berputar denga kecepatan
n
dengan arah maju.
n
sadalah kecepatan sinkron.
•
Kondisi ini menghasilkan slip positif terkait dengan medan magnet putar
yang berputar maju
s
+=(n
s
-n)/ n
sSlip positif sangatlah kecil: 1-5%
•
Hal ini pula dapat menghasilkan slip negatif karena diasumsikan berputar
melawan arah medan putar
s
-=(n
s