HALAMAN PENGESAHAN
Laporan praktikum Fisika Dasar 1 ini disusun sebagai salah satu syarat untuk memenuhi kelengkapan tugas pada mata kuliah Fisika Dasar 1.
Disahkan di : Mataram
Hari, Tanggal : Kamis, 16 Dsember 2010
Mengetahui,
Co. Ass acara 1 Co. Ass AcaraII
(Siti Fitri Jalillah ) ( Ria Rahmawati ) G1B 008 014 G1B 007 044
Co. Ass Acara III Co. Ass Acara IV
(Siti Khadijah ) ( Ahmad Nurullah ) G1B 008 007 G1B 008 022
Koordinator Co. Ass Praktikum Fisika Dasar 1 FMIPA Universitas Mataram
KATA PENGANTAR
Puji Syukur penulis panjatkan Kehadirat ALLAH SWT,yang telah
memberikan Rahmat, Taufik serta hidayahnya sehingga laporan tetap
Fisika Dasar 1 ini dapat terselesaikan dengan baik dan tepat pada
waktunya.Dengan adanya laporan tetap Fisika Dasar 1 ini, diharapkan
agar dapat menjadi acuan serta pedoman bagi mahasiswa yang lain
sehingga dapat menjadi mahasiswa yang aktif, kritis, serta memiliki
akhlak yang baik.
Ucapan terima kasih tak lupa penulis sampaikan
kepada dosen Fisika Dasar 1 srta Co.Assisten yang telah banyak
membimbing dalam pelaksanaan Praktikum sampai pada penulisan
laporan tetap Fisika Dasar 1.Dalam hal ini penulis menyadari bahwa
masih banyak terdapat kekurangan dalam penulisan laporan tetap
Fisika Dasar 1 ini,oleh karena itu penulis sangat mengharapkn
masukan atau saran dari pembaca,guna untuk lebih menyempurnakan
penulisan laporan tetap berikutnya.Akhir kata penulis mengucapkan
terima kasih serta permohonan ma’af yang sebesar-besarnya atas
kesalahan yang telah diperbuat selama praktikum Fisika Dasar 1 ini
berlangsung, serta penghargaan yang sebesar-besarnya kepada semua
pihak yang turut berperan dalam pelaksanaan praktikum berlangsung
sampai pada penulisan laporan tetap ini diterbitkan.
Mataram, Desember 2010
DAFTAR ISI
Halaman judul Halaman pengesahan Kata pengantar Daftar isi
Acara 1 : Alat Ukur dan Gerak Parabola
Acara II : Konstanta Pegas dan Bandul Matematis Acara III : Vikositas
Acara IV : Kesetimbangan Gaya dan Pusat Gravitasi
ACARA I
ALAT UKUR
A.PELAKSANAAN PRAKTIKUM
1.Tujuan praktikum : - mempelajari alat ukur waktu (stopwatch) dan alat ukur panjang (jangka sorong,micrometer sekrup, mistar) dengan ketelitian tinggi.
- (stopwatch) dan alat ukur panjang (jangka sorong, micrometeR sekrup, mistar)dengan ketelitian tinggi.
2. Hari, tanggal praktikum : Kamis, 21 Oktober 2010
3. Tempat praktikum : Laboratorium Fisika FMIPA, Universitas
Mataram, Lantai II
B. ALAT DAN BAHAN PRAKTIKUM
1.Alat
C. LANDASAN TEORI
sebagainya. Di laboratorium ada banyak macam alat ukur. Contohnya mistar atau penggaris dari plastic atau baja byang panjangnya 30 cm,penggaris yang panjangnya 1 meter, rol meter, meteran baja, mistar geser dan lainnya ( Giancoli, 2001 : 5 - 6).
Kita menyadari bahwa diperlukan suatu alat yang digunakan untuk mengukur suatu besaran yang disebut alat ukur. Dalam mengukur diperlukan alat ukur yang sesuai dengan besaran yang diukur. Selain itu, dalam mengukur menggunakan suatu alat ukur harus diperhatikan batas ukur dan ketelitian alat ukur tersebut. Adapun alat – alat ukur yang digunakan adalah mistar, jangka sorong, micrometer sekrup. Alat- alat tersebut merupakan alat ukur panjang. Sedangkan untuk alat ukur waktu biasanya digunakan stopwatch (Edi istiyono , 2004 : 6 - 7 ).
Fisika berhubungan dengan hal- hal yang dapat diukur. Apa yang dapat diukur sangat bergantung pada keadaan teknologi mutakhir. Semua ilmu mengandalkan pada pengukuran sampai satu derajat ketelitian tertentu. Untuk ilmu- ilmu hayati mungkin tidak perlu seteliti sebagaimana yang diharapkan pada ilmu- ilmu pasti, pengukuran selalu dibuat relative terhadap ilmu- ilmu bakuan tertentu, danamakan satuan (Chotimah : 1995 : 1).
D.PROSEDUR PERCOBAAN
1.Stopwatch
- waktu untuk denyut nadi diukur sebanyak 30 denyutan.
- Percobaan tersebut diulangi beberapa kali
- Dicatat hasilnya pada table pengamatan. 2.Jangka sorong
- sebuah balok diambil dan diukur panjang, lebar dan tingginya dengan mistar / penggaris.
- Diukur juga panjang, lebar dan tinggi balok tersebut dengan jangka sorong.
- Dilakukan langkah 1 dan 2 untuk beberapa kali pengamatan.
- Dicatat hasilnya dalam table pengamatan. 2. Micrometer Sekrup kertas, gotri, dan lain- lain.
- Hasilnya dicatat pada table pengamatan.
E.TABEL PENGUKURAN
Tabel 1. hasil pengukuran denyut nadi dengan stopwatch
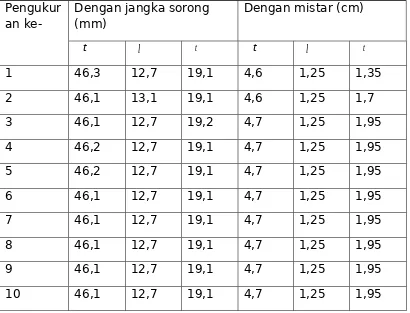
Table 2. Pengukuran Panjang, Lebar dan Tinggi Balok
Pengukur an
ke-Dengan jangka sorong (mm)
Dengan mistar (cm)
t l t t l t
1 46,3 12,7 19,1 4,6 1,25 1,35
2 46,1 13,1 19,1 4,6 1,25 1,7
3 46,1 12,7 19,2 4,7 1,25 1,95
4 46,2 12,7 19,1 4,7 1,25 1,95
5 46,2 12,7 19,1 4,7 1,25 1,95
6 46,1 12,7 19,1 4,7 1,25 1,95
7 46,1 12,7 19,1 4,7 1,25 1,95
8 46,1 12,7 19,1 4,7 1,25 1,95
9 46,1 12,7 19,1 4,7 1,25 1,95
10 46,1 12,7 19,1 4,7 1,25 1,95
Table 3. pengukuran dengan micrometer sekrup
Pengukuran
Ke
Pengukuran dengan micrometer sekrup
silet kertas kelereng Silinder
1 0,08 0,07 12,39 21,38
2 0,08 0,07 12,4 21,38
3 0,08 0,07 12,38 21,38
4 0,08 0,05 12,39 21,38
6 0,08 0,04 12,39 21,38
7 0,08 0,05 12,37 21,38
8 0,08 0,04 12,35 21,38
9 0,08 0,04 12,36 21,38
10 0,08 0,04 12,36 21,38
D.ANALISIS DATA
Table 1. pengukuran denyut nadi sebanyak 30 denyutan dengan stopwatch
Pengukuran
ke-30 denyutan (detik) 1 denyutan (detik)
1 17,5 0,58
2 18,5 0,61
3 20,5 0,63
4 20 0,66
5 19,5 0,65
6 20,2 0,67
7 20,2 0,67
8 20 0,66
9 21 0,7
10 20,3 0,67
Pengukura n
ke-ti (deke-tik)
⃗
t
(detik) ti -⃗
t
(ti -⃗
t
)2
1 0,58 0,65 -0,07 0,0049
3 0,63 0,65 -0,02 0,0004
4 0,66 0,65 0,01 0,0001
5 0,65 0,65 0 0
6 0,67 0,65 0,02 0,0004
7 0,67 0,65 0,02 0,0004
8 0,66 0,65 0,01 0,0001
9 0,7 0,65 0,05 0,0025
10 0,67 0,65 0,02 0,0004
∑
6,5 6,5 0 0,0108- waktu denyut rata- rata (
⃗
t
)⃗
t
=∑
tin
=6,5
10
=0,65 s
- Standar Deviasi (SD)
SD = Δ t =
√
∑
(t1−¯t)2n−1
=
√
0,108
10
−
1
=
√
0,108
9
= 0,109 s
% error =
SD
⃗t x100
=
0,109
0,65
x
100
= 16,76 %
- waktu satu denyut nadi =
⃗
t
±
SD
(
Δt
)
nilai maksimum =⃗
t
+
SD
⇒⃗
t
+
Δt
= 0,65 + 0,109= 0,759 s
Nilai minimum =
⃗
t
−
Δt
=
0,65 - 0,109 = 0,541 sb. pengukuran panjang, lebar dan tinggi balok
1. pengukuran dengan jangka sorong
- panjang balok
panjang P1
⃗
P
(
P
1− ⃗
P
) (P
1− ⃗
P
)
21 46,3 46,14 0,16 0,0256
2 46,1 46,14 -0,04 0,0016
3 46,1 46,14 -0,04 0,0016
4 46,2 46,14 0,06 0,0036
6 46,1 46,14 -0,04 0,0016
7 46,1 46,14 -0,04 0,0016
8 46,1 46,14 -0,04 0,0016
9 46,1 46,14 -0,04 0,0016
10 46,1 46,14 -0,04 0,0016
∑
461,4 461,4 0 0,044- Panjang rata- rata (
¯
P
)¯
P
=∑
P1 n=
P1+P2+P3+P4+P5+P6+P7+P8+P9+P10
10
=
461,3+461,1+461,1+461,2+461,2+461,1+461,1+461,1+461,1+461,1 10
= 461,4 10
= 46,14 mm
SD = ΔP=
√
∑
(PI− ¯P)2n−1
=
√
0,049
9
= 0,069
% error =
SD
¯
P x100
=
0, 07
46
,
14
x
100
= 0,151 %
Nilai P =
¯
P
±
SD
Nilai maksimum P =
¯
P
+
SD
= 46,16 + 0,07
= 46,21 mm
Nilai minimum P=
¯
P
- SD = 46,16- 0,07= 46,07 mm
→ lebar, dengan jangka sorong
Pengukura n
ℓ
i ( ℓi−¯ℓ ) ( ℓi−¯ℓ)
2
1 12,7 12,74 -0,04 0,0016
2 13,1 12,74 0,36 0,1296
3 12,7 12,74 -0,04 0,0016
4 12,7 12,74 -0,04 0,0016
5 12,7 12,74 -0,04 0,0016
6 12,7 12,74 -0,04 0,0016
7 12,7 12,74 -0,04 0,0016
8 12,7 12,74 -0,04 0,0016
10 12,7 12,74 -0,04 0,0016
∑
127,4 127,4 0 0,144- lebar rata- rata (
¯
ℓ
) ¯ℓ=
∑
ℓin
=
ℓi+ℓ2+ℓ3+ℓ4+ℓ5+ℓ6+ℓ7+ℓ8+ℓ9+ℓ10
10
=
12,7+13,1+12,7+12,7+12,7+12,7+12,7+12,7+12,7+12,7 10
= 127,4 10
= 12,74 mm
SD= Δℓ =
√
∑
(ℓi−¯ℓ)2n−1
=
√
0,144
10
−
1
=
√
0,144
9
= 0,126 mm
- % error =
SD
=
0,126
12
,
74
×
100
=
0,99
Nilai l=l±SD
Nilai maksimum
¯
l
=¯
l
+
SD
=
12
,
74
+
0,126
=
12
,
866
mm
Nilai minimum
¯
l
=¯
l
−
SD
=
12
,
74
−
0,126
=
12
,
614
mm
→ Tinggi balok dengan jangka sorong
Pengukuran
¯
t
i ¯t(
ti−¯t)
(
ti−¯t
)
21 19,1 19,11 -0,01 0,0001
2 19,1 19,11 -0,01 0,0001
3 19,2 19,11 0,09 0,0081
4 19,1 19,11 -0,01 0,0001
5 19,1 19,11 -0,01 0,0001
6 19,1 19,11 -0,01 0,0001
7 19,1 19,11 -0,01 0,0001
8 19,1 19,11 -0,01 0,0001
9 19,1 19,11 -0,01 0,0001
10 19,1 19,11 -0,01 0,0001
- tinggi rata-rata ¯t
¯
t =
∑
ti n=t1+t2+t3+t4+t5+t6+t7+t8+t9+t10
n
¿19,1+19,1+19,2+19,1+19,1+19,1+19,1+19,1+19,1+19,1
10
¿191,1
10
¿19,11mm
SD=Δt=
√
∑
(
ti−¯t)
2
n−1
=
√
0,009
10
−
1
=
√
0,009
9
=
0,031
mm
- % error =
SD
¯t x100
=
0,031
19
,
11
x
100
= 0,162 %
Nilai t = ¯t±SD
Nilai maksimum t = ¯t + SD
= 19,141 mm
Nilai minimum t = ¯t - SD
= 19,11- 0,031
= 19,079 mm
1. mengukur panjang, lebar, dan tinggi balok dengan mistar
a.panjang balok
Pengukura n
P (mm)
¯
P
(P
− ¯
P
) (P
− ¯
P
)
21 46 46,8 -0,8 0,64
2 46 46,8 -0,8 0,64
3 47 46,8 0,2 0,04
4 47 46,8 0,2 0,04
5 47 46,8 0,2 0,04
6 47 46,8 0,2 0,04
7 47 46,8 0,2 0,04
8 47 46,8 0,2 0,04
9 47 46,8 0,2 0,04
10 47 46,8 0,2 0,04
∑
468 468 0 1,6- Panjang rata-rata (
¯
P
)¯
P=
∑
P1=
Nilai P minimum
P =
¯
P
+
SD
= 46,379 mm
b.Lebar balok dengan mistar
Pengukura n
ℓi(mm)
¯
ℓ
(ℓ
i−¯
ℓ
) ( ℓi−¯ℓ)21 12,5 12,5 0 0
2 12,5 12,5 0 0
3 12,5 12,5 0 0
4 12,5 12,5 0 0
5 12,5 12,5 0 0
6 12,5 12,5 0 0
7 12,5 12,5 0 0
8 12,5 12,5 0 0
9 12,5 12,5 0 0
10 12,5 12,5 0 0
∑
125 125 0 0- lebar rata- rata (
¯
ℓ
) ¯ℓ=
∑
¯ℓin
=
ℓ1+ℓ2+ℓ3+ℓ4+ℓ5+ℓ6+ℓ7+ℓ8+ℓ9+ℓ10
10
=
12,5+12,5+12,5+12,5+12,5+12,5+12,5+12,5+12,5+12,5 10
= 1,25
- SD = Δ¯ℓ=
√
∑
(ℓi−¯ℓ)2=
√
0
10
−
1
=
√
0
9
= 0 mm
- % error =
SD
¯
ℓ x100
=
0
1,25
x
100
= 0 %
Nilai ℓ=ℓ±SD
Nilai maksimum =
¯
ℓ
+
SD
= 1,25 + 0
= 1,25 mm
Nilai minimum =
¯
ℓ
−
SD
= 1,25 – 0
= 1,25 mm
c.tinggi balok denngan mistar
Pengukura n
t
i ¯tt
i−¯
t
( ti−¯t)21 13,5 18,65 -5,15 26,5225
2 17 18,65 -1,65 2,7225
4 19,5 18,65 0,85 0,7225
5 19,5 18,65 0,85 0,7225
6 19,5 18,65 0,85 0,7225
7 19,5 18,65 0,85 0,7225
8 19,5 18,65 0,85 0,7225
9 19,5 18,65 0,85 0,7225
10 19,5 18,65 0,85 0,7225
∑
186,5 186,5 0 35,025Tinggi rata- rata ( ¯t )
( ¯t=
∑
tin )
=
t1+t2+t3+t4+t5+t6+t7+t8+t9+t10
10
=
13,5+17+19,5+19,5+19,5+19,5+19,5+19,5+19,5+19,5 10
= 186,5 10
= 18,65 mm
SD = Δt=
√
∑
(ti−¯t)2
n−1
=
√
35
,
025
9
% error =
SD
t x100
=
1,97
18
,
65
x
100
= 10,56 %
Nilai t = ¯t±SD
Nilai maksimum t = ¯t+SD
= 18,65 + 1,97
= 20,62 mm
Nilai minimum t = ¯t−SD
= 18,65 – 1,97
= 16,68 mm
Pengukuran dengan menggunakan micrometer sekrup (silet)
Pengukura
n S I
¯
S
S
I−¯
S
(S I−¯S)
2
1 0,08 0,08 0 0
2 0,08 0,08 0 0
3 0,08 0,08 0 0
4 0,08 0,08 0 0
5 0,08 0,08 0 0
6 0,08 0,08 0 0
7 0,08 0,08 0 0
9 0,08 0,08 0 0
10 0,08 0,08 0 0
∑
0,08 0,08 0 0Ukuran silet rata- rata (
¯
S
)¯
S=
∑
tin
= 0,8 10
= 0,08
SD = Δ¯S=
√
∑
(SI−¯S)2n−1
=
√
0
9
= 0 mm
% error =
SD
¯
t
=
0
0, 08
x
100
= 0 %
Nilai S =
¯
S
±
SD
Nilai maksimum S =
¯
S
+
SD
= 0,08 + 0
= 0,08 mm
= 0,08 – 0
= 0,08 mm
⇒ Pengukuran kertas
Pengukura
n k i
¯
k
k
i−¯
k
( ki−¯k)21 0,07 0,063 0,007 0,000049
2 0,07 0,063 0,007 0,000049
3 0,07 0,063 0,007 0,000049
4 0,05 0,063 -0,013 0,000169
5 0,04 0,063 -0,023 0,000529
6 0,04 0,063 -0,023 0,000529
7 0,05 0,063 -0,013 0,000169
8 0,08 0,063 1,017 0,000289
9 0,08 0,063 1,017 0,000289
10 0,08 0,063 1,017 0,000289
∑
0,63 0,063 0,000241¯
k=
∑
kin
= 0,63 10
= 0,063 mm
SD = Δk=
√
(
∑
ki−¯k)2=
√
0,00241
9
= 0,016 mm
- % error =
SD
k x100
=
0,016
0,063
x
100
= 25,39 %
Nilai k =
¯
k
±
SD
k
max
=¯
k
+
SD
= 0,063 + 0,016= 0,079 mm
k
min
imum
=¯
k
−
SD
= 0,063 – 0,016
= 0,047 mm
Pengukuran kelereng (m)
Pengukura n
m
i m¯m
i− ¯
m
( mi− ¯m)2
1 12,39 12,377 0,013 0,000169
2 12,4 12,377 0,023 0,000529
3 12,38 12,377 0,003 0,000009
4 12,39 12,377 0,013 0,000169
5 12,38 12,377 0,003 0,000009
6 12,39 12,377 0,013 0,000169
8 12,35 12,377 -0,027 0,000729
9 12,36 12,377 -0,017 0,000289
10 12,36 12,377 -0,017 0,000289
∑
123,77 123,77 0 0,000241¯
m=
∑
min
=
123,77
10 =12,377m
SD = Δm=
√
∑
(mi− ¯m)2n−1
=
√
0,00241
9
= 0,016 mm
- % error =
SD
¯
m x100
=
0,016
12
,
377
x
100
= 0,129 %
Nilai m = m¯±SD
m maksimum = m¯+SD
= 12,377 + 0,016
= 12,393 mm
= 12,377 – 0,016
= 12, 361 mm
⇒ Pengukuran silinder
Pengukura n
SI
¯
S
S
I−¯
S
(
S
I−¯
S
)
21 21,8 21,8 0 0
2 21,8 21,8 0 0
3 21,8 21,8 0 0
4 21,8 21,8 0 0
5 21,8 21,8 0 0
6 21,8 21,8 0 0
7 21,8 21,8 0 0
8 21,8 21,8 0 0
9 21,8 21,8 0 0
10 21,8 21,8 0 0
∑
21,8 21,8 0 0¯
S=
∑
SIn
= 218 10
= 21,8 mm
SD = Δt=
√
∑
(SI−¯S)2=
√
0
9
= 0 mm
⇒ % error =
SD
¯
S X100
=
0
21
,
8
x
100
= 0 %
⇒ nilai
¯
S
=¯
S
+
SD
Nilai S maksimum =
¯
S
+
SD
= 21,8 + 0
= 21,8 mm
Nilai S minimum =
¯
S
−
SD
= 21,8 – 0
= 21,8 mm
F.PEMBAHASAN
praktikum sendiri, yaitu kurang teliti yang menyebabkan hasil dari pengukuran kurang efektif,misalnya saat mulai mengukur denyut nadi, bisa saja stopwatch tidak bergerak secara
serentak.
Pada proses pengukuran jangka sorong terdapat juga perbedaan hasilnya (pengukuran). Perbedaan ini dapat dilihat dari nilai masing-masing alat. Jangka sorong untuk panjang balok dengan jangka sorong, panjang (46,3),lebar (12,7mm) dan tinggi (19,1). Sedangkan dengan menggunakan mistar, panjangnya (46 mm),lebar (12,5 mm) dan tinggi (13,5 mm). perbedaan ini membuktikan adanya ketidakpastian dalam pengukuran, disebabkan karena beberapa hal
- kurangnya ketelitian praktikum dalam membaca skala
- berkurangnya ketelitian alat ukur
- pembulatan decimal pada setiap hasil pengukuran terlalu besar.
G.Penutup
1.Kesimpulan
- cara membaca skala antara praktikum yang satu,berbeda dengan yang lain
- hasil dari pengamatan tidaklah hasil mutlak dengan teori kurangnya factor-faktor tertentu
- untuk mendapatkan hasil pengukuran yang akurat, dibutuhkan ketelitian yang tinggi dari praktikum
- semakin besar % errornya, maka hasil praktikan kurang teliti dan sebaliknya.
2.saran
- pengukuran sebaiknya dilakukan berulang kali agar mendapatkan hasil yang akurat sehingga kesalahan menjadi lebih kecil.
DAFTAR PUSTAKA
Chotimah, 1995. Fisika. Bandung:ITB.
Istiyono, Edi. 2004. Fisika Dasar. Jakarta:Erlangga.
GERAK PARABOLA
A.PELAKSANAAN PRAKTIKUM
1. Tujuan praktikum : Menentukan lintasan proyektil dengan sudut proyektil dengan sudut proyeksi yang menghasilkan jangkauan maksimum.
2.Waktu praktikum : Kamis, 11 November 2010
B. ALAT DAN BAHAN
- Busur Derajat
- Kertas Grafik
- Kertas Karbon
- Meteran baja
- Papan pemantul dan stip
- Penggaris
- Penyangga besi
- Satu set alat penembak bola (Launcher).
- Statif (klamp) ”G”
- Tiang Papan pemantul
- Tiga buah bola khusus untuk di tembakkan
C. LANDASAN TEORI
arah keaaas positif dan arah kebawah negatif sama besar) dan mencapai ketinggian yang sama dengan tempat pelemparan dibuuhkan dua kalidari waktu untuk mencapai titik tertinggi dari tempat lemparan (Sarojo, 2002 : 45 ).
Gerak sebuah peluru dipengaruhi oleh suatu percepatan gravitasi g dengan arah vertikal kebawah. Pada arah horizontal percepatan = 0. kecepatan awal peluru adalah V○ dan membuat sudut Ө○ dengan sumbu +X.komponen vektor kecepatan awal pada arah sumbu X yaitu V○x adalah sama dengan V○cosӨ○, dan sepanjang sumbu Y yaitu V○y=V○sinӨ○, karena tidak ada percepatan pada arah horizontal maka Vx adalah konstan. Jadi dapat kita tuliskan ax=0 dan dari persamaan kita peroleh Vx=V○cosӨ○. Komponen Ydari vektor kecepatan Vy akan berubah dengan percepatan tetap (Sutrisno,1997 : 18).
Salah satu contoh dari gerak lengkung dengan percepatan konstan adalah gerak peluru (proyektil). Gerak ini adalah gerak da dimensi dari vartikel yang dilemparkan miring ke udara, misalnyagerak bola aseball dan bola golf. Gerak peluru adalah gerak dengan percepatan kostan g berarah kebawah dan tidakada percepatan dalam arah horizontal. Untuk menyatakan geraknya dapat digunakan beberapa persamaan. Jika dipilih sistem koordinat dengan sumbu y positif vertikal keatas. Maka kedalam persamaan-persamaan tersebut harus dimasukkan ay=-g dan ax=0 (Hallliday,1985 : 78).
1. Penentuan bentuk lintasan
- Sebuah papan pemantul, papan register dan karbon disusun. Dengan menempatkan semua peralatan pada lintasan proyektil dalam koordinat x dan y. Titik tersebut dapat diukur.
- Diukur mulai dari papan reflektor dekat moncong senjata (launcher) dan ditandai tinggi dari moncong (h) pada kertas register.Semua nilai y dapat di ukur dari posisi ini.
- Papan reflektor ditempatkan beberapa cm dari senjata dan jarak x diukur. Bola ditembakkan kepapan reflektor kemudian di lihat jejak rekaman dibalik kertas karbon. Dibelakang itu ditulis nilai x yang diukur dengan meteran.
- Diulangi untuk beberpa nilai dengan memindahkan papan menjauh dari senjata. Dimasukkan bola lalu ditembakkan dengan laju yang sama untuk untuk beberapa kali tembakan dengan sudat Ө tetap.
- Minimal 10 posisi direkam. Kertas regustrasi dilepas dan diukur setiap koordinat y.
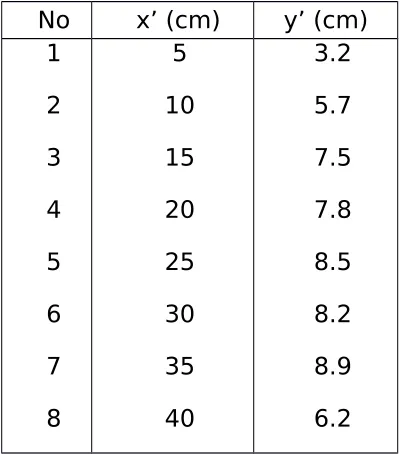
- Nilai-nilai untuk x dan y diplot pada sebuah grafik.
- Digunakan skala yang sama tetapi ditentukan bacaan sumbu y’ untuk nilai x’.
2. Pengukuran jangkauan (range) proyektil
- Papan reflektor dipasang (dengan kertas karbon dan kertas registrasi) plat bola pada posisi P. Range R bola dapat diukur kearah moncong untuk berbagai sudut Ө.
- Diplot grafik range R, sin sudut Ө
- Dihitung V, laju awal proyektil.
- Ditentukan sudut Ө mana yang menghasilkan range maksimum.
E. TABEL PENGAMATAN
1. Penentuan bentuk lintasan (trayektil).
9
10
45
50
3.7
3.2
2. Pengukuran jangkauan (range) proyektil
α 30º 45º 60º
bakkn x
26,7 cm
70,57 cm 60,1 cm
F. ANALISIS DATA
5 10 15 20 25 30 35 40 45 50 20
21 22 23 24 25 26 27 28
2. Penentuan kecepatan awal (Vo)
Y = x tan - ½
gx2 V0cos2α
Jadi : V02 =
1 2 g x
2
(x tan α−y)cos2α
Dimana tan =
Y ' X'
=
22
,
2
cm
3. Penentuan range maksimum
- Pada saat = 30 R = 26,7 cm
- Pada saat = 45 R = 70,57 cm
- Pada saat = 60 R = 60,1 cm
Jadi yang menghasilkan range terjauh adalah sudut 450
G.PEMBAHASAN
Pada percobaan ini diakukan dua buah percobaan yaitu penentuan lintasan proyektil dimana menurut teori lintasan akan berbentuk parabola atau setengah lingkaran namun karena ke- salahan praktikan dalam menembakkan atau pada saat mengukur menentukan titik koordinatnya maka hasil lintasan yang didapat tidak sepenuhnya berbentuk parabola, dan saat penghitungan V0 atau ecepatan awal dimana seharusnya V0-nya akan tetap, tetapi dalam perhitungan kami menun- jukkan hasil yang berbeda-beda. Hal ini dikarenakan kesalahan praktikum dalam menghitung dan menentukan rumus turunan kecepatan awal gerak proyektil tersebut.
yaitu jangkauan proyektil terjauh pada saat sudut tembakan 45º.
H. PENUTUP
1. Kesimpulan
- Pada percobaan pertama (penentuan bentuk lintasan) dihasilkan gambar lintasan parabola yang tidak sempurna, hal ini dikarenakan kesalahan dan kekeliruan praktikan.
- Titik puncak atau y maksimum adalah
- V0 yang didapatkan dari nilai x’ dan y’ yang berbeda-beda adalah tidak sama, hal ini juga dikarenakan kesalahan dan kekurangan telitian dari praktikan dalam mmengukur dan menghitung.
- Range terjauh ditempuh saat sudut tembakan 45º
2. Saran
- Diperlukannya sebuah kerjasama yang baik antara praktikan yang satu dengan yang lain supaya didapatkan hasil yang maksimal
DAFTAR PUSTAKA
Ishak , Mohammad . 2008 . Fisika Dasar I. Bandung : Gramedia.
Halliday , david . 1985 . Fisika Jilid I . Bandung : PT Aksara.
Sarojo , G. Aby . 2002 . mekanika . Salemba . Salembateknikpress
ACARA II
KONSTANTA PEGAS DAN BANDUL MATEMATIS
A. PERCOBAAN KONSTANTA PEGAS
I. PELAKSANAAN PRAKTIKUM
a. Tujuan Praktikum : - Menentukan konstanta pegas, yaitu kekuatan pegas
berdasarkan Hukum Hooke.
- Menentukan konstanta pegas berdasarkan getaran selaras.
b. Waktu Praktikum : Kamis, 4 November 2010
c. Tempat Praktkum : Laboratorium Fisika Dasar, Lantai II, Fakultas MIPA,
II. ALAT DAN BAHAN
1. Satu set pegas 2. Satu set beban 3. Stopwatch
4. Neraca atau timbangan 5. Statif
III. TEORI DASAR
Bila suatu benda dikenai sebuah gaya dan kemudian gaya tersebut dihilangkan, maka benda akan kembali ke bentuk semula, berarti benda itu adalah benda elastis. Namun pada umumnya benda bila dikenai gaya tidak dapat kembali ke bentuk semula walaupun gaya yang bekerja sudah hilang. Benda seperti ini disebut benda plastis. Contoh benda elastis adalah karet ataupun pegas. Bila pegas ditarik melebihi batasan tertentu maka benda itu tidak elastis lagi. Misalnya kita tinjau pegas yang dipasang horizontal,dimana pada ujung pegas tersebut dikaitkan sebuah benda bermassa m. Massa benda diabaikan, demikian juga dengan gaya gesekan, sehingga benda meluncur pada permukaan horizontal tanpa hambatan. Setiap pegas memiliki panjang alami, jika pada pegas tersebut tidak diberikan gaya. Pada keadaan ini, benda dikaitkan pada ujung pegas berada dalam posisi setimbang. Secara matematis persamaan pada pegas berlaku :
Fp = − k. X Dengan k = konstanta pegas
Fp= Gaya pemulih ( N ) X = perpanjangan pegas (m)
Persamaan inilah yang disebut dengan Hukum Hooke. Tanda (−) dalam persamaan menunjukkan berarti gaya pemulih berlawanan arah dengan arah perpanjangan ( Bachtiar, 2010: 210 -211).
menyerupai sistem ini. Semua pegas memiliki panjang alami dimana pada posisi massa pada keadaan ini disebut posisi setimbang ( Giancoli, 1998: 365).
F = m. A = - m.w2. x
F = - k. X K = m.w2
Bagian linear antara komponen tegangan dan renggangan umumnya dikenal Hukum Hooke. Bayangan sebuah elemen sebagai 4 paralelepiped dengan sisi sejajar terhadap sumbu koordinat dan mengalami keja tegangan normal όz terbagi rata di sepanjang 2 sisi yang berlawanan seperti pada pengujian taik ( Timosenko, 1986: 37 ).
IV. CARA KERJA
1. Menghitung konstanta pegas berdasarkan Hukum Hooke a. Beban yang akan digunakan ditimbang dan dicatat hasilnya.
b. Beban ( m1) digantungkan pada pegas dan pertambahan panjang pegas diukur.
c. Beban ( m2 ) ditambahkan dan pertambahan panjang pegas di ukur lagi.
d. Beban ditambahkan terus menerus dan hasilnya dicatat.
e. Beban dikurangi satu per satu dan hasil pengurangan panjang pegas di catat.
2. Menghitung konstanta pegas berdasarkan getaran selaras ( harmonik ) a. Beban ( m1 ) di gantungkan pada pegas dan digetarkan dengan
menarik sejauh x ( tidak jauh )dan di lepaskan. Waktu n getaran di hitung dan di catat hasilnya.
c. Bean dikurangi satu per satu dan catat waktu getar untuk n getar setiap pengurangan beban sebagaimana pada waktu penambahan beban dan catat hasilnya.
V. HASIL PENGAMATAN
Tabel Hasil Pengamatan
Tabel 1. Pengukuran Massa Bandul
Massa Beban
m1 m2 m3 m4 m5 m6 m7 m8 m9 m10
50 gr 50 gr 50 gr 50 gr 50 gr 50 gr 50 gr 50 gr 50 gr 50 gr
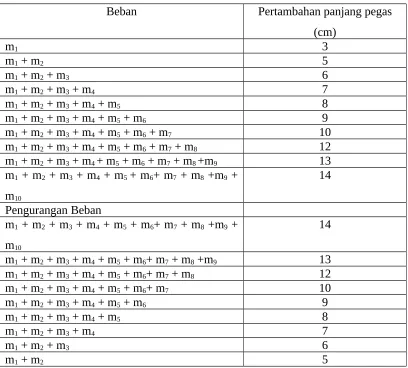
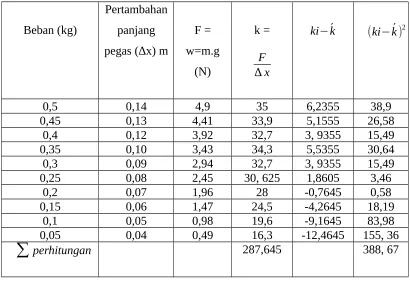
Tabel 2. Menentukan Konstanta Pegas Berdasarkan Hukum Hooke
Beban Pertambahan panjang pegas
m1 3
P = panjang mula – mula pegas = 16 cm
Tabel 3. Menentukan konstanta pegas berdasarkan getaran selaras
Beban Waktu t (s) getar untuk getaran
m1 3,73
VI. ANALISIS DATA
1.Menentukan konstanta pegas berdasarkan Hukum Hooke. Tabel 1. Penambahan Beban
(N) F ∆ x
0,05 0,03 0,49 16,3 -12, 4645 155,36
0,1 0,05 0,98 19,6 -9,1645 83,98
0,15 0,06 1,47 24,5 -4,2645 18,19
0,2 0,07 1,96 28 -0,7645 0,58
0,25 0,08 2,45 30,625 1,8605 3,46
0,3 0,09 2,94 32,7 3,9355 15,49
0,35 0,1 3,43 34,3 5,5355 30,64
0,4 0,12 3,92 32,7 3, 9355 15,49
0,45 0,13 4,41 33,92 5, 1555 26,58
0,5 0,14 4,9 35 6,2355 38,9
∑
perhitungan 287,645 388, 67=
√
388,67 9= 6,57 N/ m
Nilai k
k=´k ± ∆ k
= 28, 7645 ± 6,57 Nilai k maksimum
k = 28, 7645 + 6,57 = 35, 3345 N/ m Nilai k minimum
k = 28,7645 – 6, 57 = 22, 1945 N/m
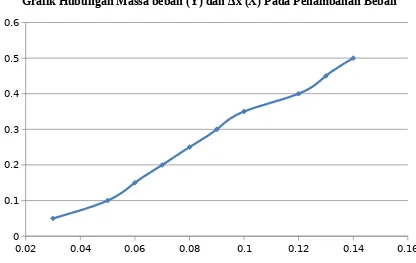
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16
0 0.1 0.2 0.3 0.4 0.5 0.6
tanθ=k
θ=40°
k=tan 40° = 0,839 N/m
Tabel 2. Pengurangan Beban
Beban (kg)
0,45 0,13 4,41 33,9 5,1555 26,58
0,4 0,12 3,92 32,7 3, 9355 15,49
0,35 0,10 3,43 34,3 5,5355 30,64
0,3 0,09 2,94 32,7 3, 9355 15,49
0,25 0,08 2,45 30, 625 1,8605 3,46
0,2 0,07 1,96 28 -0,7645 0,58
0,15 0,06 1,47 24,5 -4,2645 18,19
0,1 0,05 0,98 19,6 -9,1645 83,98
0,05 0,04 0,49 16,3 -12,4645 155, 36
∑
perhitungan 287,645 388, 67Standar Deviasi ( SD )
k k−´¿
¿ ¿2
¿ ¿
∑
i=1 n
¿
¿
∆ k=√¿
¿
√
388,679
¿6,57N/m
Nilai k :
k=´k ± ∆ k
¿(28,7645±6,57)N/m
Nilai k maksimum
k=28,7645+6,57 ¿35,3345N/m
Nilai k minimum
k=28,7645–6,57
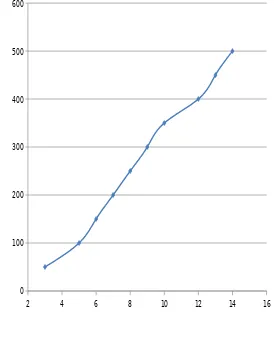
2 4 6 8 10 12 14 16 0
100 200 300 400 500 600
Grafik hubungan massa (Y) dengan ∆x (X) pada pengurangan beban
tanθ=k
θ=40°
k=tan 40°
¿0,839N/m
Beban (kg) Waktu
0,1 4,08 0,408 0,17 23,69 -4,246 19,59
0,15 4,84 0,484 0,23 25,253 -2,863 8,197
0,2 5,16 0,516 0,27 29,62 1,504 2,262
0,25 5,60 0,560 0,31 31,44 3,324 11,05
0,3 6,39 0,639 0,4 28,98 0,864 0,746
0,35 6,52 0,652 0,43 32,47 4,354 18,96
0,4 7,01 0,701 0,49 32,103 3,987 15,89
0,45 7,49 0,749 0,56 31,63 3,514 12,35
0,5 7,88 0,788 0,62 31, 76 3,644 13,27
∑
perhitungan 281, 116 296,805 Rata – rata nilai k :Standar Deviasi (SD) :
¿
√
296,8059
¿5,74N/m Nilai k :
k=´k ± ∆ k
¿(28,116±5,74)N/m
Nilai k maksimum
k=´k+∆ k
¿28,116+5,74
¿33,856N/m
Nilai k minimum
k=´k −∆ k
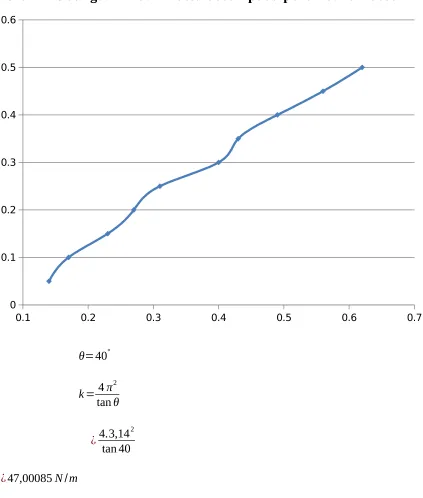
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0
0.1 0.2 0.3 0.4 0.5 0.6
Grafik hubungan T2 dan massa beban pada penambahan beban
θ=40°
k=4π
2
tanθ
¿4.3,14
2
tan 40 ¿47,00085N/m
Tabel pengurangan beban Beban (kg) Waktu
untuk 10 kali getaran
T = t / n
T2 k=4π2m T2
0,5 7,84 0,784 0,61 32,08 4,76 22,65
0,45 7,34 0,734 0,54 32,94 5,62 31,58
0,4 7,07 0,707 0,5 31,56 4,24 17,98
0,35 6,72 0,672 0,45 30,57 3,25 10,56
0,3 6,38 0,638 0,4 29,07 1,75 3,0625
0,25 5,90 0,590 0,35 28,32 1 1
0,2 5,40 0,540 0,3 27,049 -0,271 0,073
0,15 4,78 0,478 0,23 25, 89 -1,43 2,045
0,1 4,23 0,423 0,18 22,04 -5,28 27,88
0,05 3,79 0,379 0,14 13,73 -13,59 184,69
∑
perhitungan 273,2 301,52 Rata rata nilai k :k=´k ± ∆ k
¿(27,32±5,78)N/m
Nilai k maksimum
k=27,32+5,78 ¿33,11N/m
Nilai k minimum
k=27,32−5,78
¿27,32−5,79
¿21,53N/m
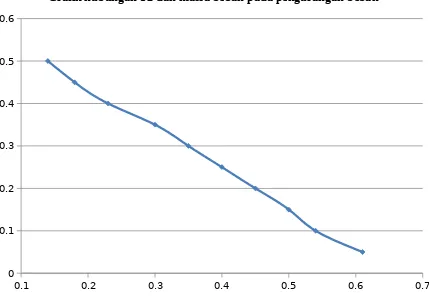
0.1 0.2 0.3 0.4 0.5 0.6 0.7
0 0.1 0.2 0.3 0.4 0.5 0.6
θ=45°
k=4π
2
tanθ
¿4.3,14
2
tan 45
¿39,438 N/m
VII. PEMBAHASAN
Dalam percobaan ini kita akan mencari dan menentukan konstanta pegas berdasarkan Hukum Hooke dan getaran selaras. Pada percobaan pertama yaitu menentukan konstanta pegas berdasarkan hukum Hooke kita menggunakan persamaan yakni :
F=−k . ∆ x
Pertama – tama kami menggunakan 10 beban yang masing – masing beratnya 50 gr ( m1 – m10) dengan pertambahan panjang tiap beban yang ditambah pun berbeda – beda. Konstanta pegas dapat diperoleh dengan menggunakan rumus :
k=m . g
∆ x
Dengan melakukan analisis data dapat diperoleh nilai k rata – rata ( k´ ) sebesar 28,7645 N/m, standar deviasi sebesar 6,57 N/m dan nilai k maksimum dan minimum sebesar sebesar 35,3345 N/m dan 22,1945 N/m. Selain itu kami juga menggunakan grafik. Grafik tersebut kami menentukan konstanta pegasnya dengan menggunakan rumus :
k=tanθ
berdasarkan Hukum Hooke antara perhitungan ketidakpastian dan grafik nilainya sangat jauh berbeda, ini disebabkan kesalahan dan kurangnya ketelitian dalam pmbuatan grafik dan penentuan θ nya tersebut, maka itu diperoleh hasil yang jauh berbeda.
Pada percobaan yang kedua yakni menentukan konstanta pegas berdasarkan getaran selaras. Kami menghitung waktu yang digunakan dalam 10 kali getaran menggunakan 10 buah beban yang masing – masing beratnya sebesa 50 gr. Dalam hal ini dilakukan dua kali sesi yakni sesi pertama dengan penambahan dan yang kedua dengan pengurangan beban. Untuk menentukan konstanta pegasnya menggunakan rumus:
k=4π
2
m T2
Pada penambahan beban kami memperoleh nilai k rata – rata sebesar 28,116 N/m, standar deviasi sebesar 5,74 N/m dan nilai k pada perhitungan ketidakpastian sebesar k(maks) = 33,856 dan k(min) = 22,376 N/m. Dan pada grafik penambahan beban kami memperoleh nilai k sebesar 47,00085 N/m. Sedangkan pada pengurangan beban kami memperoleh nilai k rata – rata sebesar 27,32 N/m, sandar deviasi sebesar 5,79 N/m dan nilai k pada perhitungan ketidakpastian sebesar k(maks)= 33,11 N/m dan k (min) = 21,53 N/m. Sedangkan nilai konstanta pegas pada pengurangan beban pada grafikkami peroleh sebesar 39,438 N/m. Nilai konstanta pegas pada pngukuran berdasarkan getaran selaras antara perhitungan ketidakpastian dan grafik tidaklah jauh berbeda, walaupun perbedaannya antara 6 – 13 poin, tetapi tidaklah sangat jauh berbeda bila dibandingkan dengan penentuan konstanta pegas berbasarkan hukum Hooke.
konstanta pegas k(min)nya sama besar ini dikarenakan pagas yang digunakan sama dan menunjukkan pada percobaan ini kami lakukan dengan baik dan benar.
VIII. PENUTUP
1. Kesimpulan
a. Berdasarkan hukum Hooke diperoleh konstanta pegas sebesar k(maks) = 35 N/m dan k(min) = 22 N/m.
b. Berdasarkan getaran selaras diperoleh nilai konstanta pegas sebesar k(maks) = 33 N/m dan k(min) = 22 N/m.
c. Nilai konstanta pegas berdasarkan Hukum Hooke sedikit berbeda pada k9mak)nya sedangakan pada k(min)nya sama besar dengan pengukura berdasarkan getaran selaras.
d. Konstanta pegas dapat ditentukan berdasarkan hukum Hooke yang berpengaruh adalah pertambahan panjang pegas (∆x) dan massa beban.
e. Dalam mencari nilai k pada atau berdasarkan getaran selaras yang berpengaruh adalah tarikan dan waktu tiap getarannya.
2. Saran
Lebih menjaga ketenangan dalam melakukan praktikum agar mendapatkan hasil pengamatan yang teliti, baik dan benar.
Bachtiar, S.pd,M. Pd,Si. 2010. Fisika Dasar 1. Yogykarta : Kurnia Kalam Semesta.
Giancoli, Dauglas C. 1999. Fisika Edisi Kelima Jilid 1. Jakarta :Erlangga. Timosenko, S.P. 1989. Teori Elastisitas. Jakarta : Erlangga.
.
BANDUL MATEMATIS
I. PELAKSANAAN PRAKTIKUM
a. Tujuan Praktikum :-Memahami gerak osilasi ysng tidak teredam.
-Menentukan besarnya nilai percepatan gravitasi.
b. Waktu Praktikum : Kamis, 4 November 2010
Universitas Mataram
II. ALAT DAN BAHAN
1. Beban atau bandul dan benang sebagai penggantung bandul(beban). lingkaran.Komponen tangensialnya bertindak sebagai gaya pemulih yang bekerja pada m untuk mengembalikannya ke titik seimbang.Jadi gaya pemulihnya adalah F=-mg sin .ϴ Gaya pemulih ini tidaklah sebanding dengan simpangan sudut α, melainkan dengan sin , karena itu gerak yang terjadi bukanlah gerak harmoni sederhana. Tetapi bila sudut ϴ kecil, maka sin ϴ hampir sama dengan ϴ bila dinyatakan dalam radian. Pergeseran sepanjang busur adalah x = lϴ,dan untuk sudut yang kecil keadaanya mendekati gerak dalam garis lurus. Jadi dengan menganggap sin ≡ ϴ maka kita peroleh F = - mg ϴ = - mg x
L = - ( mg
l ¿x
(David Halliday, 1985:459).
Ayunan sederhana (bandul matematis) adalah sebuah benda yang digantungkan pada tali ringan yang mempunyai panjang tetap jika benda diberi simpanngan sudut dan dilepaskan maka benda berayunϴ
pada bidang vertical karena pengaruh gaya berat. Benda bermassa m merupakan ayunan sederhana (Ganinjati, 2002 : 184).
Bila Amplitudo getaran tidak kecil, gerak bandul bersifat periodik, namun tidak harmonic sederhana. Periode sedikit memiliki ketergantungan pada amplitude sehingga diungkapkan dalam bentuk amplitude sudut Øo, periode diberikan oleh :
T = To [ 1 + 1
sebuah bola kecil bermassa m yang digantungkan pada ujung tali. Gaya yang bekerja pada bola adalah gaya berat( w = mg) dan gaya tegangan tali FT. Gaya berat memilki komponen mg cos yang searah tali dan mg sinϴ
yang tegak lurus tali. Bandul berosilasi akibat adanya komponen gaya
ϴ
berat mg sin . Karena tida ada gaya gesekan udara, maka bandulϴ
melakukan osilasi sepanjang busur lingkaran dengan amplitude tetap sama (Bachtiar, 2010: 218-219).
IV. CARA KERJA
a. Gantungkan benda (m) pada tali dengan panjang tertentu.
b. Simpangkan badul dengan sudut tertentu (<100) dari titik
kesetimbangan.
c. Lempaskan bandul dan hitung waktunya untuk 10 ayunan.
d. Ulangi cara (a) sampai (c) untuk beberapa panjang tali yang berbeda dan catat hasilnya.
e. Ulangi cara (a) sampai (d) untuk massa benda (m2) berbeda dan catat
hasilnya.
V. HASIL PENGAMATAN
Beban (bandul) Panjang tali (cm) Waktu ayunan (detik)
20 10,14
VI. ANALISIS DATA
Beban Panjan
0,1 8,35 0,835 5,66 -2,153 4,63 0,7
0,15 9,69 0,969 6,30 -1,513 2,29 0,93
0,2 10,07 1,007 7,78 -0,033 0,001 1,014
0,25 11,35 1,135 7,65 -0,163 0,027 1,29
M1=295
gr 0,3 12,50 1,25 7,57 -0,243 0,06 1,56
0,35 12,98 1,298 8,19 0,377 1,42 1,7
0,4 13,24 1,324 8,99 1,177 1,38 1,75
0,45 14,92 1,492 7,97 0,157 0,024 2,22
0,5 15,10 1,51 8,64 0,827 0,7 2,83
0,55 15,20 1,52 9,38 1,567 2,4 2,31
∑ 78,13 11,714
∆ g=
√
Nilai g maksimum dan minimum g = ´g ± Δg
= (7,813 ± 1,14) m/s2
o Nilai g maksimum g = ´g + Δg = 7,813 + 1,14 = 8,953 m/s2
o Nilai g Minimum g = ´g + Δg = 7,813 - 1,14 = 6,673 m/s2
Grafik pengamatan percobaan bandul matematis pada m1
0 0.1 0.2 0.3 0.4 0.5 0.6
grafik pengamatan percobaan bandul matematis pada m1 sbx= L (m) dan sb y= T2
g = 4π
0,1 8,14 0,814 5,98 2,18 4,75 0,66
0,15 8,70 0,870 7,89 4,09 16,73 0,75
0,2 10,14 1,014 7,66 3,86 14,89 1,03
0,25 11,44 1,44 7,53 3,73 13,91 1,31
M2=
0,108 0,3 11,79 1,79 8,52 4,72 22,27 1,39
0,35 12,24 1,224 0,09 -3,71 13,76 149,8
0,4 13,47 1,347 0,08 -3,72 13,84 181,4
0,45 14,40 1,440 0,08 -3,72 13,84 207,3
0,5 14,74 1,474 0,09 -3,71 13,76 217,2
0,55 15,60 1,560 0,09 -3,71 13,76 243,4
∑ 141,51
Standar deviasi (SD)
Nilai g maksimum dan minimum g = ´g ± Δg
= (3,80 ± 3,96) m/s2
o Nilai g maksimum g = ´g + Δg = 3,80 + 3,96 = 7,76 m/s2
o Nilai g Minimum g = ´g + Δg = 3,80 – 3,96 = -0,16 m/s2
Grafik pengamatan percobaan bandul matematis pada m2
0 0.1 0.2 0.3 0.4 0.5 0.6
grafik pengamatan percobaan bandul matematis pada m2 dengan sbx= L (m) dan sb y = T2 (s)
g = 4π menghitung standar deviasi dan nilai percepatan gravitasi pertama menggunakan massa 295 gram diperoleh nilai dari standar deviasi 1,14 m/s2 dan nilai percepatan
gravitasi pada metode ketidakpastian yaitu maksimumnya 8,953 m/s2 dan
minimum 6,673 m/s2. Sedangkan dengan metode grafiknya diperoleh percepatan
gravitasi 7,95 m/s2.
Pada percobaan kedua menggunakan massa 0,108 kg di dapatkan standar deviasi 3,96 m/s2 dan nilai percepatan gravitasi pada metode
ketidakpastian yaitu maksimumnya 7,76 m/s2 dan minimum sebesar -0,16 m/s2.
Pada metode grafik didapatkan percepatan gravitasi 0,0272 m/s2.
Dari hasil data tersebut diketahui percepatan gravitasi pada m2= 0,108
kg dan m1 = 0.295 kg, tetapi dari data yang kami dapatkan 295 gram,karena kami
tidak merubah terdahulu ke kilogram ,tetapi hasil yang diperoleh berbeda tipis dengan nilai yang masih dalam gram.Waktu ayunan m2 juga lebih cepat
dibandingkan dengan m1,hal ini dipengaruhi oleh massa beban.
VIII. PENUTUP
1. KesimpulanUntuk simpangan yang kecil gaya pembalik adalah sebanding dengan simpangan dan mempengaruhi arah berlawanan.
2. Saran
Ketelitian sangat diperlukan dalam praktikum dan kerjasama yang baik.
Harus lebih memahami terdahulu prosedur percobaan agar mudah dalam melakukan praktikum.
Bachtiar, S.pd. Mpd,Si. 2010. Fisika Dasar I. Yogyakarta: Kurnia Kalam Semesta.
Halliday, David. 1985. Fisika Jilid 1. Bandung: PT. Gelora Aksara Pratama. Sarjono, Aby Ganinjati.2002. Seri Fisika Dasar Mekanika. Jakarta: Salemba
Tekhnika.
VISKOSITAS ZAT CAIR
A. PELAKSANAAN PRAKTIKUM
1. Tujuan Praktikum : menentukan koefisien viskositas (kekentalan) zat cair
berdasarkan hokum stokes. 2. Waktu Praktikum : Kamis, 11 November 2010
3. Tempat Praktikum : Laboratorium Fisika Dasar,Lantai II,FMIPA,Universitas Mataram.
B. ALAT DAN BAHAN PRAKTIKUM
1. Alat – alat Praktikum Tabung gelas di lengkapi dengan tali di ikat pada tabung. Bola 2. Bahan Praktikum
Minyak Oli
C. LANDASAN TEORI
Sebuah gaya di butuhkan untuk menarik pelat atas karena fluida di samping pelat memberikan gaya gesekan viskositas yang melawan gerakan nya. Gaya F ternyata sebanding dengan V dan A dan berbanding terbalik dengan jarak pisah pelat 2.
Konstanta perbandingan ini di sebut koefisien viskositas . F = .V . A
Z
Satuan SI viskositas adalah N.S /m2 = Pa.S satuan Cgs yang masih
sering di gunakan adalah poise (Tippler,1991 : 408).
dan mengalir pelan pelan. Pengaliran vicious ini tidak seleluasa pengaliran cairan. Jadi seolah olah aliran itu terganggu oleh semacam gesekan yaitu gesekan antara bagian bagian satu dengan yang lain. Jadi, viskositas adalaha ketidak leluasaan pengaliran cairan dan gas yang di sebabkan oleh gesekan antara bagian bagian cairan dan gas tersebut (Soedojono,1986 : 35).
The viscosity of a fluid a measure of its resistace of flow under an applied forces. The greaters the viscosity,the large the force require to mainter the flow,and the more energy that is dissipated. Molases has a hight a ricosity,water a smaller viscosity and air a still smaller viscosity (Sternheim and kane , 1991 : 351).
D. PROSEDUR PERCOBAAN
1. Ditentuka massa jenis benda yang akan di gunakan pada neraca yangdi uku diameter nya sesuai petunjuk. Diukur juga massa jenis fluida seperti massa jenis fluida.
2. Dijatuhkan benda dalam tabung yang berisi zat cair,di cata waktu dan jarak tempuh nya setelah di capai kecepatan terminal (stasioner) sesuai petunjuk.
3. Di ulangi langkah 1 dan 2 beberapa kali menurut petunjuk asisten dan di hitung viskositas zat cair tersebut.
4. Dilakukan kembali langkah 1 dan 3 di atas untuk zat cair yang berbeda.
E. HASIL PENGAMATAN
a. Tabel pengukuran massa jenis fluida benda.
Bola Massa
0,026 0,026 0,026 0,026 0,02 6
Fluida Volume (l) Massa tabung
kosong M.tabungisi
Minyak 0,005 0,0105 0,01479
Oli 0,005 0,0105 0,01502
c. Tabel pengukuran jari-jari tabung fluida
Tabung fluida D1 D2 D3 D4 D5
Minyak 0,08135 0,0835 0,08135 0,08135 0,08135
Oli 0,0822 0,08235 0,08235 0,0823 0,0823
d. Tabel pengukuran waktu jatuh benda. Fluida Jarak
tempuh t1 t2 t3 t4 t5 t6 t7 t8 t9 t10
Minyak 0,3 1,2
3 1,23 1,21 1,30 1,12 1,18 0,95 1,53 1,19 1,07
Oli 0,3 2,0
5
2,1 6
0,24 2,90 2,12 2,06 2,07 2,13 2,09 2,00
F. ANALSISI DATA
a. Tabel Pengukuran Massa Jenis Benda
Bola Massa (kg) (m) r= V=
Minyak 0,0099 0,026 0,026 0,026 0,026 0,026 0,026 0,013 9,198. 1076,32
Oli 0,009961 0,0253 0,0252 0,0252 0,0253 0,025 0,0125 0,0125 8,177. 1218,17
b. Tabel Pengukuran Massa Jenis Fluida
Fluida Volume (L) TabungMassa
Kosong (kg)
0,005 0,0105 0,01479 4,29 . 858
Oli
0,005 0,0105 0,01502 4,52 . 904
c. Table pengukuran jari-jari tabung fluida ( R )
Tabung Fluida
Minyak 0,08135 0,0835 0,08315 0,08315 0,08315 0,08286 0,04143
Oli 0,0822 0,08235 0,08235 0,08235 0,08235 0,08235 0,04115
d. Tabel Pengukuran Waktu Jatuh Bola
Fluida Jarak Tempuh (m)
Dalam praktikum kali ini yang bertujuan memnentukan viskositas suatu zat cair berdasarkan hukum stokes. Dalam percobaan ini, zat cair yang digunakan ada 2 macam yaitu minyak dan oli. Sebagaimana yang kita ketahui tingkat kekntalan antara minyak dengan oli sangat berbeda walaupun jenis diantara keduanya hampir sama.
Ada beberapa nilai yang harus dicari terlebih dahulu sebelum mengukur viskositas minyak dan oli. Kita harus mencari massa jenis bola (benda) dan mencari nilai massa jenis fluida (minyak dan oli). Berdasarkan perhitungan yang dilakukan mendapatkan massa jenis benda I dan II yaitu 1076,32 kg/m3 dan 1218,17 kg/m3 selain massa jenis keduan benda tersebutr
berbeda dan jari-jari yang diukur berbeda. Dari hasil perhitungan dalam mencari massa jenis keduan fluida tersebut diadapakan yaitu massa jenis minyak858 kg/m3 dan oli sebesar 904 kg/m3 dari perbedaan tersebut diketahui
bahwa massa jenis keduanya berbeda dan kekentalannya pun berbeda.
Nilai viskositas yang didapatkan yaitu berbeda-beda tergantung dari jenis fluida yang digunakan. Viskositas pada zat cair terutama disebabkan oleh gaya kohesi antar molekul. Nilai viskositas minyak yang didapat 305,59.10-3 Pa.S dan viskosita oli adalah 0,705 Pa.S terbukti memang
oli memiliki kerapatan atau kekentalan lebih besar dibandingkan dengan minyak. Besaran yang berpengaruh terhadap nilai viskossitas yaitu maas jenis bendda, masssa jenis fluida, jari-jari tabung dan waktu jatuhnya bola. Standar deviasi yang didapatkan pada minyak adalah 56,745 Pa.S sedangkan pada oli adalah124,84 Pa.S standar deviasi minyak lebih bear dibandingkan dengan oli.
H. PENUTUP 1. Kesimpulan
Setiap fluida memiliki koefisien viskositas yang berbeda-beda.
Dari hasil analisis data diperoleh nilai viskositas minyak sebesar 305,59.10-3 Pa.S.
Dari hasil analisis data diperoleh nilai viskositas oli sebesar 0,705 Pa.S. Viskositas oli lebih besar daripada viskositas minyak,artinya oli lebih
kental daripada minyak.
Komponen yang mempengaruhi viskositas yaitu jari-jari, volume, massa jenis dan panjang lintasan.
Massa jenis setiap benda tergantung pada massa benda dan volume benda serta dipengaruhi oleh kerapatan benda.
Viskositas suatu fluida tergantung dari jenis fluida dan kerapatannya.
2. Saran
Peningkatan kerjasama antar kelompok agar praktikum berjalan lancer. Setiap pengukuran membutuhkan ketelitian dari para praktikan
DAFTAR PUSTAKA
Soedojono. 1986. Asas-asas Ilmu Fisika Jilid 1. Yogyakarta : Gajah Mada University Press.
Sternheim,Marton M and Kane,Joseph W. 1991. General Physics second Edition. Canada : Simultaneously.
ACARA VI
KESETIMBANGAN GAYA
A.PELAKSANAAN PRAKTIKUM
a. Tujuan :
Menjelaskan tentang Hukum Newton pertama.
Mahasiswa dapat mengetahui gaya-gaya
dalam beadaan setimbang.
c. Tempat : Laboratorium Fisika, lantai II,FMIPA, kecuali jika benda itu di paksa untuk mengubah keadaan tersebut oleh gaya-gay a yang di kerjakan padanya. Untuk membuktikan hokum Newton pertama , kita perlu membuat devinisi kata “gaya” dalam hokum tersebut . Hukum I Newton juga memperkelalkan kita dengan satu pengertian lagi. Sifat bahwa benda akan tetap berada pada keadaannya, yaitu diamatau bergerak lurus disebut inersia. Jadi inersia adalah sifat benda yang menyatakan hambatannya terhadap perubahan gerak ( Sutrisno,1997:33 ).
Agar sebuah benda diam, jumlah gaya yang bekerja padanya harus berjumlah nol, karena gaya merupakan vector.Komponen –komponen gaya total masing-masing harus nol. Dengan demikian syarat kesetimbangn adalah
ΣFx=0 ;ΣFy=0 ;ΣFz=0
Pada umumnya kita akan berhunungan dengan gaya-gaya yang bekerja pada bidang, sehingga kita biasanya memerlukan komponen x dan y. kita harus ingat bahwa jika sebuah komponen gaya tertentu menunjukkan sepanjang arah sumbu x dan y negative (Dauglas,2001:286)
M3
1. Diambil tiga buah benda yang berbeda dan di
gantung dengan menggunakan beneang pada katrol yang terpasang pada statuf.
2. Dipastikan simpul ikatan benang tepat bersimpul pada titik pusat busur derajat.
3. Diukur tiga sudut : α,β,γ (α+β=γ-360).
4. Digunaka sepuluh kombinasi beban dengan massa yang berbeda.
5. Untuk setiap set data ( F1+F2+F3)digambarkan
dengan vector gaya dengan sudut masing-masing α,β,γ.Panjang vector gaya pada diagram dalam kertas millimeter sebanding dengan berat dalam gram.
6. Dari kesepuluh macam pengukuran apakah ada segitiga yang tepat tertutup sempurna.
Fh = F2 cos ( - 90) – F1 cos (α - 90)
= m2 . g . cos( - 90) – m1. g . cos (α - 90)
= 0,025 . 9,8 . cos(115 - 90) – 0,025 . 9,8 . cos (120 - 90)
= 0,025.9,8 . cos(25) – 0,025 . 9,8. cos (30)
= 0,2205 – 0,2107
= 114,66 . 10 -3 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,025 . 9,8 . sin (115 - 90) + 0,025. 9,8.sin (120-90) –
0,025 . 9,8
=0,025 . 9,8. sin (25) +0,025 . 9,8. sin (30) – 0,025 . 9,8
= 0,1029 + 0,1225 – 0,245
= - 0,0196
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,05 . 9,8 cos(118 - 90) – 0,05 . 9,8 . cos (120 - 90)
= 980.10 -3 . cos(28) – 490.10 -3 . cos (30)
= 980.10 -3 (0,88) – 490.10 -3 (0,86)
= 0,4321 – 0,4214
= 0,01 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,05 . 9,8 . sin (118 - 90) +0,05. 9,8 . sin (120-90) -0,05
. 9,8
= 0,05 . sin (28) + 0,05 . sin (30) – 0,05 . 9,8
= 0,05 . 9,8 (0,46) + 0,05 (0,5) – 0,49
= 0,2254 + 0,244 – 0,49
= -0,0196 N
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,75 . 9,8 . cos(110 - 90) – 0,75 . 9,8 . cos (125 - 90)
= 0,75 .9,8 cos(20) – 0,75 .9,8 cos (35)
=0,75 (0,94) – 0,75 . 9,8 (0,81)
= 6,909 – 5,95
= 0,95 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,75 . 9,8 . sin (110 - 90) + 0,75. 9,8.sin (125-90) –
0,75 . 9,8
= 0,75 . 9.8 . sin (20) + 0,75 .9,8 . sin (35) – 0,75 . 9,8
= 7,35 (0,642) + 7.35 (0,57) – 7,35
= 2,499 + 4,1895 – 7,35
= - 0,66 N
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,1 . 9,8 . cos(125 - 90) – 0,1 . 9,8 . cos (115 - 90)
= 0,1 . 9,8 . cos(35) – 0,1 . 9,8 . cos (25)
= 0,1 . 9,8 (0,82) – 0,1 . 9.8 (0,90)
= 0,8036 – 0,882
= -0,078 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,1. 9,8 . sin (125 - 90) + 0,1. 9,8.sin (115-90) – 0,1. 9,8
= 0,1 . 9,8 . sin (35) + 0,1 . 9,8 . sin (25) – 0,1 . 9,8
= 0,98 (0,57) + 0,98 (0,42) – 9,8
=0, 5586 + 0,4116– 9,8
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,15 . 9,8 . cos(115 - 90) – 0,15 . 9,8 . cos (120 - 90)
= 0,15 . 9,8 . cos(25) – 0,15 . 9,8 . cos (30)
= 0,15 . 9,8 (0,90) – 0,15 .9,8 (0,86)
= 1,323 – 1,264
= 0,05 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,15 . 9,8 . sin (115 - 90) +0,15. 9,8.sin (120-90) –
0,15. 9,8
= 1,47 . sin (25) + 1,47 . sin (30) – 1,47
= 1,47 (0,42) + 1,47 (0,5) – 1,47
= 0,6174 + 0,735– 1,47
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β- 90) – m1. g . cos (α - 90)
= 0,15 . 9,8 . cos(115 - 90) – 0,15 . 9,8 . cos (110 - 90)
= 0,15.9,8 . cos(25) – 0,15.9,8.cos (20)
= 1,323 – 1,3818
= -0,06 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,15 . 9,8 . sin (115 - 90) + 0,15. 9,8.sin (110-90) –
0,01 . 9,8
= 0,15.9,8 . sin (25) + 0,15.9,8 . sin (20) – 0,98
= 0,6174 + 0,4998 – 0,98
= 0,14 N
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
= 0,15 . 9,8 . cos(10) – 0,1 . 9,8 . cos (40)
= 1,4406 – 0,7448
= 0,7 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,15 . 9,8 . sin (100 - 90) + 0,1. 9,8.sin (130-90) – 0,1 .
9,8
= 0,15 . 9,8 . sin (10) + 0,1 . 9,8 . sin (40) – 0,1 . 9,8
= 0,25 + 0,36 – 0,98
= - 0,1 N
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
error Fh=Fh×100 ¿
α−90°
(¿¿)
m1. g .cos(β−90°)+m2. g .cos¿ 0,5¿
¿0,7×100 ¿
130°−90°
(¿¿)
0,1.9 .8.cos(100°−90°)+0,15.9,8.cos¿ 0,5¿
¿0,7×100 ¿
¿ 70
M3
M2 M1
= 140 0
= 130 0 = 90 0
100 kg
100 kg
200 kg
Gambar VIII
¿43,89
error Fv=Fv.100
F3 ¿Fv.100
F3
¿0,1.100
m3. g
¿ 10 0,1.9,8 ¿10,2
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,2 . 9,8 . cos(90 - 90) – 0,1 . 9,8 . cos (130 - 90)
= 0,2 . 9,8 . cos(0) – 0,1 . 9,8 . cos (40)
= 1,96 – 0,744
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,2 . 9,8 . sin (90 - 90) + 0,1. 9,8.sin (130-90) – 0,1 .
9,8
= 0,2 . 9,8 . sin (0) + 0,1 . 9,8 . sin (40) – 0,1. 9,8
= 0 + 0,63 – 0,98
= - 0,35 N
α−90°
(¿¿)
F1.cos(β−90°)+F2.cos¿ 0,5¿
error Fh=Fh×100 ¿
α−90°
(¿¿)
m1. g .cos(β−90°)+m2. g .cos¿ 0,5¿
¿1,21×100 ¿
130°−90°
(¿ ¿)
0,1.9 .8.cos(90°−90°)+0,2.9,8.cos¿ 0,5¿
¿1,21×100 ¿
¿ 121 0,5[0,98+1,48]
¿61,42
error Fv=Fv.100
M3
M2 M1
= 115 0
= 130 0 = 115 0
100 kg
150 kg
150 kg
Gambar IX
¿0,35.100
F3
¿0,35.100
m3. g
¿ 35 0,1.9,8
¿35,71
Fh = F2 cos (β - 90) – F1 cos (α - 90)
= m2 . g . cos(β - 90) – m1. g . cos (α - 90)
= 0,15 . 9,8 . cos(115 - 90) – 0,1 . 9,8 . cos (130 - 90)
= 0,15 . 9,8 . cos(25) – 0,1 . 9,8 . cos (40)
= 1,32 – 0,74
= 0,58 N
Fv = F1 sin ( - 90) + F2 sin ( - 90) – F3
= m1 . g . sin ( - 90) + m2. g . sin ( - 90) – m3 . g
= 0,15 . 9,8 . sin (115 - 90) + 0,1. 9,8.sin (130-90) –
0,15 . 9,8