Desain dan Simulasi Logika Fuzzy
Kontroler berbasis Switched Mode Power Supply
Rajesh Kr Ahuja, Rajesh Kumar
Departemen Teknik Elektro, YMCA Universitas Ilmu & Teknologi
Abstrak
Modus saklar power supply (SMPS) telah dicapai kepadatan daya tinggi dan kinerja tinggi dengan mengembangkan perangkat semikonduktor daya seperti IGBT, BJT, MOSFET, dan GTO dll SMP memiliki kapasitas untuk menangani beban variabel dan variabel tegangan input. Efisiensi, berat dan ukuran pasokan listrik adalah daerah yang besar perhatian untuk catu daya desainer. Artikel ini memperkenalkan metode regulasi cerdas untuk mengontrol converter Buck menggunakan lebar pulsa modulasi switching dengan logika kontroler fuzzy. Dalam makalah ini kami menggunakan sirkuit SMP memiliki kekuatan MOSFET sebagai switch dan Fuzzy logic controller sinyal PWM gerbang berdasarkan ke switch untuk mengendalikan tujuan. Makalah ini menjelaskan desain kabur logic controller menggunakan tegangan output dari konverter sebagai umpan balik untuk secara signifikan meningkatkan kinerja dinamis buck dc-dc converter dengan menggunakan MATLAB / SIMULINK. Tegangan output SMPS tetap terlepas konstan beban dan masukan variasi tegangan dari 140V ke 340V.
1. PERKENALAN
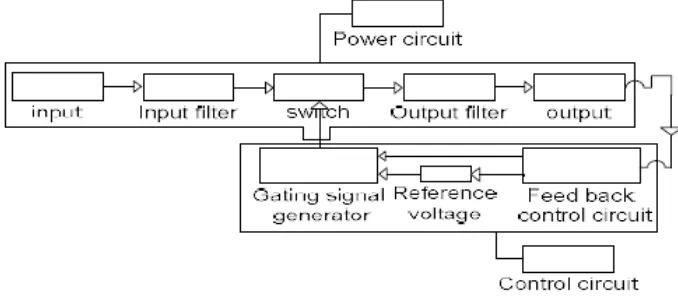
Saat ini, untuk banyak peralatan listrik elektronik sistem kontrol telah meningkat banyak. Penting dengan ini tuntutan pelanggan, banyak peneliti atau desainer telah berjuang untuk menemukan terpercaya dan paling ekonomis controller untuk memenuhi tuntutan tersebut. Dibandingkan dengan membuka sistem loop ide untuk memiliki sistem kontrol di dc-dc converter adalah untuk memastikan tingkat tegangan yang diinginkan dari output dapat diproduksi secara efisien. Makalah ini menjelaskan pengoperasian SMP (beralih modus power supply), kontrol PWM, rectifier, kontroler fuzzy dan uang konverter. Diagram blok berisi dua sirkuit utama, satu adalah sirkuit listrik dan satu lagi adalah rangkaian kontrol, yang digunakan untuk mengontrol pulsa yang disediakan untuk tombol power.
Gambar 1 Blok Diagram dari SMP
2. DESAIN FUZZY LOGIC CONTROLLER
untuk menjadi salah satu pengendali cerdas. Tulisan ini menggunakan fuzzy logic controller dengan umpan balik dari tegangan output masing-masing. Tegangan output dalam rangkaian akan diumpankan ke kontroler fuzzy untuk memberikan ukuran yang tepat pada sinyal steady state. Teknik ini dapat diterapkan untuk berbagai topologi konverter dc-dc seperti Buck, Boost dan Buckland Meningkatkan.
Berdasarkan pengetahuan manusia kendali logika fuzzy dibangun oleh sekelompok aturan perilaku sistem. Untuk dinamis perilaku dc-to-dc converter dan kinerja pengendali yang diusulkan kita menggunakan Matlab simulasi. desain kabur logic controller dapat memberikan sinyal yang diinginkan baik besar dan kinerja yang dinamis sinyal kecil, yang tidak mungkin di teknik kontrol linier. Jadi, fuzzy logic controller memiliki kemampuan untuk meningkatkan ketahanan dc-to-dc konverter. Skema dasar controller terdiri dari empat komponen utama seperti: a fuzzifikasi, yang mengubah masukan nilai data ke dalam nilai-nilai linguistik yang cocok; basis pengetahuan, yang terdiri dari aturan kontrol mengatur dan data base dengan definisi linguistik diperlukan; Keputusan-Membuat logika, yang digunakan untuk simulasi proses keputusan manusia dan menyimpulkan aksi kontrol fuzzy dari pengetahuan tentang aturan kontrol dan definisi variabel linguistik; Dan Antarmuka defuzzifikasi, yang menghasilkan tindakan kontrol fuzzy non dari tindakan kontrol fuzzy disimpulkan.
Analisis rangkaian buck converter mengungkapkan bahwa arus induktor memainkan tugas penting dalam respon dinamis buck converter. itu juga menyediakan informasi energi penyimpanan dalam konverter. Dengan demikian, setiap perubahan dalam induktor saat ini dapat mempengaruhi tegangan keluaran konverter, tegangan output akan memberikan informasi kondisi steady state of converter. Namun, tiga parameter utama perlu dipertimbangkan ketika merancang konverter buck adalah kekuatan switch, kapasitor dan induktor.
3. Fuzzy Logic Fungsi Keanggotaan
Buck dc-dc konverter adalah fungsi nonlinear dari siklus karena model sinyal kecil dan pengendaliannya Metode ini diterapkan pada kontrol konverter buck. Dalam kontroler Fuzzy model matematika tidak memerlukan. Sebagai gantinya, mereka dirancang berdasarkan pengetahuan umum dari tanaman (converter). Kontroler Fuzzy dirancang untuk mengadopsi berbagai titik operasi. Fuzzy Logic Controller dirancang untuk mengontrol output dari buck dc-dc converter. Dalam kabur Sistem logika dua variabel input, kesalahan (e) dan perubahan error (de) dan satu variabel output (u) adalah siklus dari PWM output digunakan.
Gambar 2 Plot Fungsi Keanggotaan kesalahan.
Gambar 3 Keanggotaan Plot Fungsi error perubahan
Gambar 4 Keanggotaan Plot Fungsi rasio tugas
4. Fuzzy Logic Tabel Aturan
Aturan kontroler fuzzy yang memainkan peran yang sangat penting untuk simulasi kontroler yang diperoleh dari analisis sistem perilaku. Dalam formulasi mereka itu harus diperhatikan bahwa, Dengan menggunakan kontroler ini kita meningkatkan konverter pertunjukan dalam hal respon dinamis dan ketahanan. ketika tegangan output jauh dari set point yaitu error (e) adalah NB atau PB, controller harus melakukan tindakan korektif yang kuat yaitu siklus mendekati nol atau memiliki dinamis Tanggapan secepat mungkin, jelas dengan
mempertimbangkan spesifikasi batas saat sistem.
Tabel 1: Aturan untuk kesalahan dan perubahan error
Kedua, ketika kesalahan tegangan output dari sistem pendekatan ke nol yaitu error (e) adalah ZE, NS, PS kemudian untuk memastikan stabilitas sekitar titik kerja, kesalahan saat ini harus benar diperhitungkan. ketika nilai saat ini mendekati nilai batas, aturan yang sesuai harus diperkenalkan untuk mencegah overshoots besar. Aturan fuzzy kontrol untuk kesalahan dan perubahan error dapat disebut pada tabel 1: \
5. Hasil Simulasi
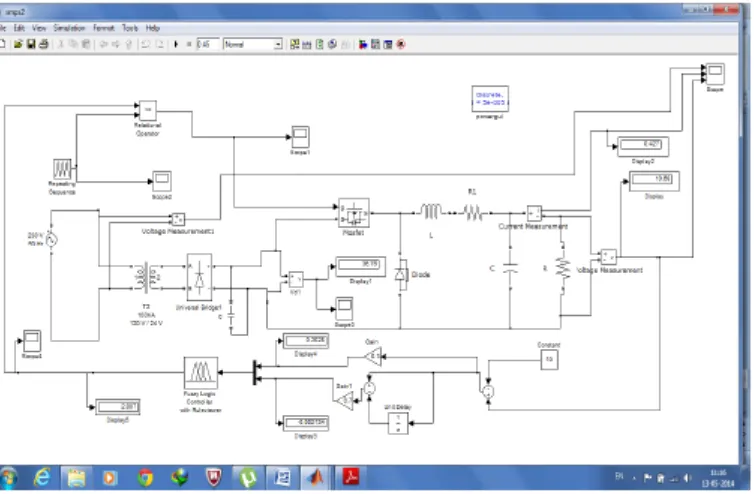
Gambar 5 Closed Loop model Simulink dari Buck converter menggunakan Fuzzy logic controller
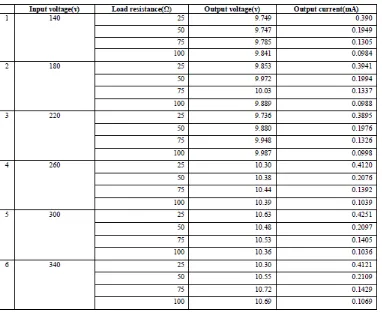
Simulasi dilakukan dengan variasi tegangan input dari 140 volt menjadi 340 volt pada beban yang berbeda mempertahankan keluaran tegangan konstan pada 10 volt Hasil simulasi ditunjukkan pada Gambar 5-8 dan ditabulasi pada Tabel 2.
5.1 Hasil dengan variasi beban: -
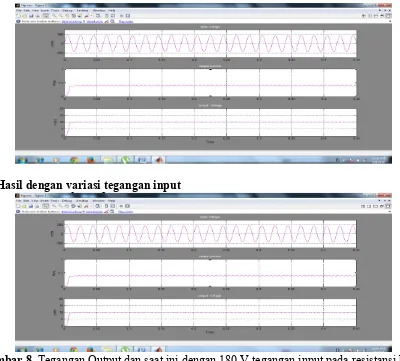
Gambar 7. Tegangan Output dan saat ini dengan 140 V tegangan input pada resistansi beban 50Ω
5.3 Hasil dengan variasi tegangan input
Gambar 9. Keluaran Tegangan dan arus dengan 220 V tegangan input pada resistansi beban 25Ω
Tabel 2: - Hasil dengan beban dan tegangan input variasi
6. KESIMPULAN
karena itu, rangkaian buck DC- DC converter dikendalikan oleh kontroler logika fuzzy dikonfirmasi kebutuhan pendekatan yang diusulkan.
Referensi
[1] Bimal K.Bose: Modern Power Electronics dan Ac Mobil [2] Mohan, N. (2007): First Course di Power Electronics.
[3] Rashid, M H. (2004): Power Electronics: Circuits, Devices dan Aplikasi. [4] P. Vijaya Kumar dan Dr. S. Rama Reddy: Closed Loop Controlled SMP Sistem
Menggunakan Teruskan Converter.
[5] Elena Niculescu: Analisis Converters PWM Menggunakan Matlab simulasi, dan evaluasi eksperimental