17
BAB III
PROSES PERANCANGAN
3.1 Tinjauan Umum
Perancangan prototype elevator atau lift tiga lantai ini mengacu pada
lift-lift yang telah ada secara umum dengan tujuan agar hasil perancangan bisa menyerupai lift yang sebenarnya. Namun demikian ada beberapa fungsi yang tidak diterapkan karena keterbatasan dalam segala hal mengenai sistem ini. Fungsi –fungsi yang tidak diterapkan pada perancangan ini antara lain sistem pengereman atau perlambatan pada pengendalian kecepatan motor penggerak, dan juga tampilan atau indikator lantai sebagai penanda.
Secara garis besar sistem prototype elevator atau lift ini terdiri dari tiga bagian utama, yaitu :
Bagian masukan
Bagian pengendali / controller Bagian keluaran
Bagian masukan bertugas memberikan segala informasi mengenai kondisi yang sedang terjadi pada lift kepada controller. Controller akan mengolah semua informasi dari bagian masukan kemudian akan menentukan langkah-langkah apa saja yang seharusnya dilakukan. Langkah-langkah-langkah yang dilakukan kemudian dikirim ke bagian keluaran, kemudian komponen-komponen pada bagian keluaran akan bekerja sesuai perintah yaitu menggerakkan motor
penggerak. Sedangkan rangkaian catu daya bertugas mengatur supply tegangan yang diperlukan oleh sistem .
3.2 Diagram Blok
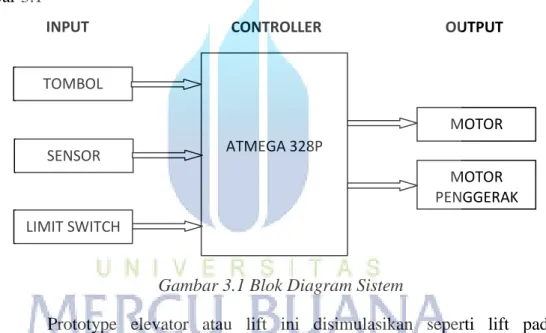
Seperti yang telah dijelaskan sebelumnya, bahwa controller dalam hal ini ATMEGA 328P berfungsi sebagai otak dari keseluruhan sistem yang mengatur kenerja keseluruhan sistem berdasarkan informasi yang didapat dari komponen-komponen masukan. Dalam hal ini informasi didapat dari tombol-tombol yang terpasang di bagian luar lift pada setiap lantai dan di bagian dalam lift. Tombol-tombol ini berfungsi untuk memberi perintah ke controller kelantai berapa lift harus bergerak. Diagram blok pada rangkaian prototype lift ini dapat dilihat pada gambar 3.1
Gambar 3.1 Blok Diagram Sistem
Prototype elevator atau lift ini disimulasikan seperti lift pada umumnya. Untuk itu tahapan pengoperasian alat ini adalah, pengguna yang berada di luar lift dapat menekan tombol yang tepat berada disamping pintu lift, dengan begitu lift akan bergerak ke lantai dimana pengguna berada. Setelah pintu lift terbuka pengguna dapat langsung masuk ke dalam lift, lalu pengguna lift dapat menekan tombol yang berada di dalam lift sesuai dengan lantai yang akan pengguna tuju. Tombol yang berada di dalam lift antara lain tombol lantai 1, tombol lantai 2, tombol lantai 3, tombol buka pintu dan tombol tutup pintu. Tombol-tombol lantai ini mengaktifkan sensor-sensor yang terpasang di setiap lantai (yang terpasang di hoistway), yang berfungsi untuk menghentikan lift sesuai dengan lantai yang dituju. Berdasarkan kondisi-kondisi tombol tersebut
ATMEGA 328P TOMBOL MOTOR PINTU MOTOR PENGGERAK LIMIT SWITCH SENSOR
IN1 2 OUT1 3 OUT2 6 OUT3 11 OUT4 14 IN2 7 IN3 10 IN4 15 EN1 1 EN2 9 VS 8 VSS 16 GND GND U1 L293D D IG IT A L (~ P W M ) A N A L O G IN ATME G A 3 2 8P -P U 11 2 1 ~ ~ ~ ~ ~ ~ m ic ro c o n tr o la n d o s .b lo g s p o t.c o m TX RXPD0/RXD 0 PD1/TXD 1 PD2/INT0 2 PD3/INT1 3 PD4/T0/XCK 4 PD5/T1 5 PD6/AIN0 6 PD7/AIN1 7 PB0/ICP1/CLKO 8 PB1/OC1A 9 PB2/SS/OC1B 10 PB3/MOSI/OC2A 11 PB4/MISO 12 PB5/SCK 13 AREF PC5/ADC5/SCL A5 PC4/ADC4/SDA A4 PC3/ADC3 A3 PC2/ADC2 A2 PC1/ADC1 A1 PC0/ADC0 A0 RESET DUINO1 ARDUINO UNO R3 LUAR_LT3 LUAR_LT2 LUAR_LT1 2 3 4 5 6 7 8 1 RP1 RESPACK-7 DALAM_LT3 DALAM_LT2 DALAM_LT1 BUKA TUTUP 2 3 4 5 6 7 8 1 RP2 RESPACK-7 SW_PINTU_OPEN SW_PINTU_CLOSE PINTU KATROL SEN_LT3 SEN_LT2 SEN_LT1 2 3 4 5 6 7 8 1 RP3 RESPACK-7 IN1 IN2 PINTU_PWM KATROL_PWM IN3 IN4 PINTU KATROL PINTU_PWM KATROL_PWM DALAM_LT3 DALAM_LT2 DALAM_LT1 BUKA TUTUP SEN_LT1 SEN_LT2 SEN_LT3 LUAR_LT1 LUAR_LT2 LUAR_LT3 1 2 3 U2:A 7400 4 5 6 U2:B 7400 IN 1 IN2 PINTU 10 9 8 U2:C 7400 13 12 11 U2:D 7400 IN4 IN 3 KATROL U1(VS) SW_PINTU_OPEN SW_PINTU_CLOSE SW OPEN SW CLOSE SENSOR LT 3 SENSOR LT2 SENSOR LT1 LT 3 LT2 LT1 BUKA TUTUP LT3 LT2 LT1 T O M B O L L U A R TOMBOL DALAM <--- BUKA | TUTUP ---> <--- NAIK | TURUN ---->
maka controller akan membacanya, lalu memerintahkan motor utama bekerja. Motor yang dirancang untuk menggerakan lift (melalui kinerja mekanik) mampu menggerakkan lift naik ataupun turun sesuai dengan kondisi tombol. Setelah lift melayani pengguna ke lantai yang dituju, maka controller memerintahkan motor utama untuk mati melalui status sensor lantai yang telah aktif karena berada di lantai yang dituju, sehingga lift dapat berhenti dengan kondisi level. Kemudian controller memerintahkan motor penggerk pintu untuk membuka pintu secara otomatis dengan kecepatan yang telah diatur. Saat pintu membuka penuh (full open) pintu yang membuka akan berhenti secara otomatis melalui limit switch full open yang telah terpasang. Selanjutnya controller akan menghitung sebelum pintu menutup kembali secara otomatis, dalam hal ini pintu dapat menutup kembali lebih cepat jika kita menggunakan tombol tutup pintu yang berada di dalam lift, begitu juga dengan tombol buka pintu, dapat digunakan untuk menahan pintu untuk membuka lebih lama, ataupun membuka kembali pintu yang sedang perlahan menutup. Sehingga dapat menyesuaikan sesuai dengan kondisi pengguna. Setelah pintu sudah kembali menutup penuh (full close), lift pun selanjutnya dapat digunakan kembali untuk melayani pengguna lainnya dengan cara kerja yang sama.
Untuk mewujudkan kinerja system seperti yang telah dibahas diatas, system ini di buat seperti skema pada gambar 3.2
Pada skema rangkaian dapat dilihat bagaimana penyambungan berbagai komponen baik komponen masukan maupun keluaran dengan controller Arduino ATMEGA 328P. Tombol luar lift yang terdiri dari 3 tombol (tombol lantai 1, 2 dan 3) menggunakan pin digital pada Arduino, tombol dalam lift yang terdiri dari 5 tombol (tombol buka pintu dan tutup pintu, dan tombol lantai 1, 2, 3) dimana memanfaatkan pin digital dan analog (menggunakan analog karena ketersediaan pin Arduino yang terbatas), dan juga sensor reed switch yang menggunakan pin analog. Kemudian 2 buah motor DC, yang terdiri dari motor penggerak (katrol) dan motor pintu (buka/ tutup pintu) yang menggunakan PWM yang telah diatur melalui Driver Motor/ Motor Shield L298.
3.3 Perangkat Keras (Hardware)
Pada bagian yang telah dijelaskan cara kerja sistem umum yaitu, bagaimana sistem merespon permintaan pengguna dan mengerjakan langkah-langkah sesuai urutan prioritas. Pada bagian kali ini akan dibahas cara kerja rangkaian dengan lebih rinci pada tiap-tiap bagian pada rangkaian.
3.3.1 Perancangan Sistem Mekanik
Perancangan mekanik terbagi menjadi dua bagian yaitu bagian kerangka lift dan sangkar lift.
Perancangan Kerangka Lift
Pembuatan kerangka lift ini dibangun menggunakan acrylic sebagai dinding-dinding lift. Akrelik yang dipakai sebagai dinding lift mempunyai ketebalan 4mm. Lift yang dibangun adalah lift tiga lantai yang mana ketinggian kerangka lift adalah 60cm x 20cm. Masing-masing lantai memiliki ketinggian sekitar 20cm.
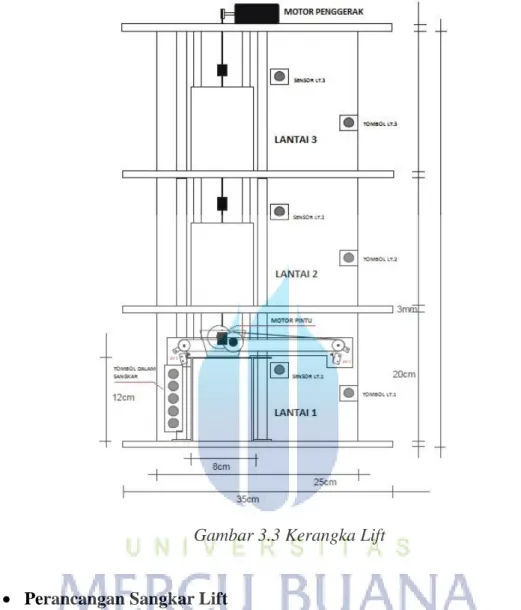
Pada kerangka lift ini terpasang dua buah rail sebagai pegangan sangkar lift nantinya. Pada kerangka lift terdapat beberapa buah tombol dan sensor reed switch. Fungsi masing-masing tombol adalah tombol tujuan, tombol panggil (call) dan tombol buka tutup pintu lift. Sedangkan fungsi sensor sendiri sebagai pemutus motor penggerak agar lift dapat berhenti secara otomatis (level dengan lantai) Gambar perancangan kerangka lift dapat dilihat pada gambar 3.3
Gambar 3.3 Kerangka Lift
Perancangan Sangkar Lift
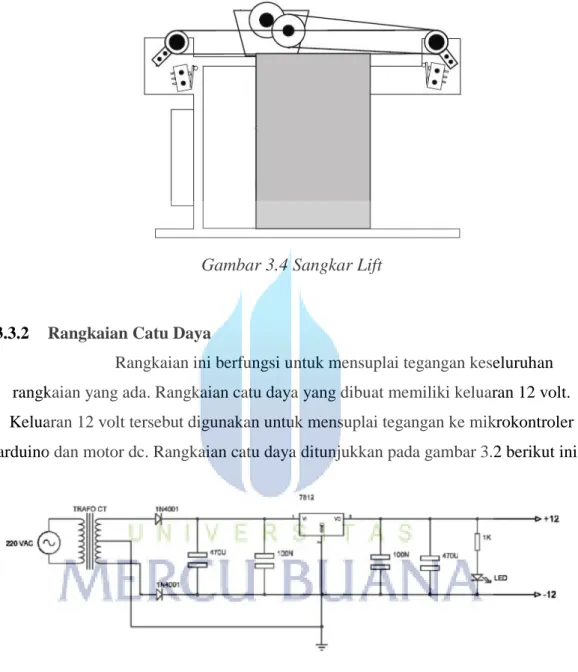
Pada bagian sangkar lift dibangun juga menggunakan bahan acrylic. Ukuran sangkar lift adalah 8cm x 10cm x 12cm. Pada sangkar lift terdapat sebuah motor DC yang digunakan sebagai buka dan tutup pintu lift serta terdapat pula dua buah limit switch yang terletek pada bagian kiri dan kanan sangkar lift yang mana berfungsi sebagai pembatas buka dan tutup pintu secara penuh (full open dan dull close). Agar pintu lift dapat bergerak kekiri dan kekanan dibutuhkan karet tape yang terpasang pada pulley (roller) motor DC dan pulley pada ujung atas pergerakan pintu. Jadi pada saat motor DC berputar arah clock wise (CW) maka pintu kan bergerak menutup pintu pada sangkar lift, begitu juga pada saat motor DC bergerak kearah counter clock wise (CCW) maka pintu terbuka dan akan
berhenti jika bersentuhan dengan limit switch. Gambar perancangan sangkar lift dapat dilihat pada gambar 3.4
Gambar 3.4 Sangkar Lift
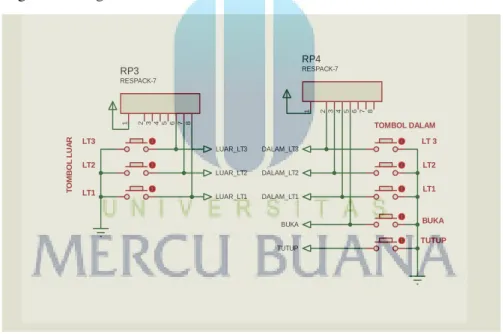
3.3.2 Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensuplai tegangan keseluruhan rangkaian yang ada. Rangkaian catu daya yang dibuat memiliki keluaran 12 volt. Keluaran 12 volt tersebut digunakan untuk mensuplai tegangan ke mikrokontroler arduino dan motor dc. Rangkaian catu daya ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.5 Rangkaian Catu Daya
Trafo CT merupakan trafo step down yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt DC. Kemudian 12 volt akan disearahkan dengan menggunakan dioda, selanjutnya 12 volt akan diratakan oleh kapasitor 1000μF dan kapasitor 22000μF. Regulator tegangan 12 volt (L2812C) digunakan agar keluaran yang dihasilkan tetap 12 volt walaupun terjadi perubahan tegangan masukkannya. Dan juga terdapat sebuah LED sebagai indikator saat catu daya bekerja.
LUAR_LT3 LUAR_LT2 LUAR_LT1 2 3 4 5 6 7 8 1 RP3 RESPACK-7 DALAM_LT3 DALAM_LT2 DALAM_LT1 BUKA TUTUP 2 3 4 5 6 7 8 1 RP4 RESPACK-7 LT 3 LT2 LT1 BUKA TUTUP LT3 LT2 LT1 T O M B O L L U A R TOMBOL DALAM
3.3.3 Rangkaian Tombol dan Limit Switch
Rancangan prototype elevator atau lift 3 lantai ini menggunakan 8 buah tombol dan 2 buah limit switch. Untul tombol terbagi menjadi dua bagian, yaitu 3 buah tombol sebagai tombol luar lift yang terpasang di tiap-tiap lantai (untuk
memanggil lift) dan 5 buah tombol sebagai tombol dalam lift yang terpasang di dalam
lift (terdiri dari 3 buah tombol untuk melayani ke tiap-tiap lantai, dan 2 buah tombol
sebagai perintah untuk membuka dan menutup pintu lift saat lift berada pada posisi
level terhadap lantai).
Delapan buah tombol dan 2 buah limit switch ini terhubung ke controller melalui pin digital yang telah tersedia pada arduino. Terpasang pada pin digital karena keluaran atau kerja tombol ini adalah antara on dan off atau 1 dan 0. Berikut
adalah gambar rangkaian dari tombol-tombol lift.
Gambar 3.6 Rangkaian Push Button
3.3.4 Rangkaian Sensor Reed Switch
Rangkaian sensor reed switch sama halnya dengan rangkaian tombol dan juga limit switch, yang membedakan adalah cara kerjanya. Sensor reed switch bekerja melalui medan magnet, dimana medan magnet mengoperasikan kontak yang ada pada reed switch.
Pada prototype lift ini sensor reed switch berfungsi untuk mendeteksi lift
sensor ini akan memerintahkan mikrokontroller untuk memberhentikan motor
penggerak sehingga lift pun berhenti secara level (sesuai dengan lantai). Sensor reed
switch pada alat ini menggunakan 3 buah yang dipasang di tiap-tiap lantai, sedangkan magnet itu sendiri diletakkan diatas sangkar lift.
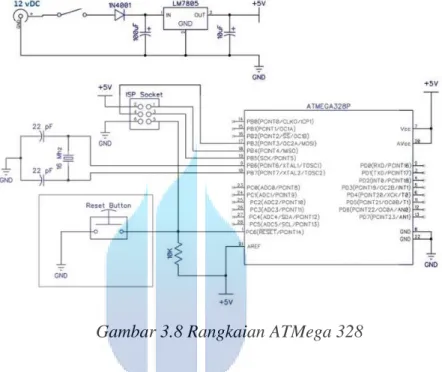
3.3.4 Rangkaian Mikrokontroler ATMega 328
Rangkaian mikrokontroler berfungsi untuk mengolah sinyal yang dikirimkan
oleh instrument-instrumen yang ada pada lift. 6 buah push button (tombol lantai)
mengirimkan sinyal untuk menggerakan motor penggerak untuk memanggil ataupun
melayani pengguna lift (lift naik ataupun turun). 3 buah sensor reed switch untuk
memerintahkan motor penggerak agar berhenti (lift berhenti level terhadap lantai). 2
buah push button (tombol buka dan tutup pintu lift) mengirimkan sinyal untuk menggerakan motor pintu untuk membuka ataupun menutup pada saat lift dalam keadaan level. 2 buah Limit Switch untuk memerintahkan motor pintu agar mati atau berhenti setelah pintu lift membuka ataupun menutup secara penuh (full open, full
close). Sehingga dari instrument-instrumen tersebut saat digabungkan dengan
program yang disesuaikan dengan cara kerja nya dapat menghasilkan cara kerja
lift secara otomatis.
Sebuah rangkaian Arduino Uno ditunjukan pada gambar di atas. Arduino Uno menggunakan mikrokontroler ATMega 328p dan memiliki 14 input output dan 6 input analog (dimana 6 dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jak power, ICSOP header, dan tombol reset. Gambar rangkaian ATMega 328p ditunjukkan pada gambar 3.5 berikut ini :
Gambar 3.8Rangkaian ATMega 328
Sumber tegangan untuk Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Eksternal (non-USB) daya dapat berasal baik dari AC-ke adaptor-DC atau baterai. Arduino dapat beroperasi dengan pasokan tegangan eksternal 6 sampai 20 volt. Apabila diberikan tegangan kurang dari 7 volt, jika tegangan pada pin 5 volt kemungkinan akan kurang dari 5 volt dan dapat menyebabkan board arduino tidak stabil. Jika menggunakan lebih dari 12 volt, regulator tegangan bisa panas dan merusak board arduino. Kisaran yang disarankan adalah 7 sampai 12 volt.
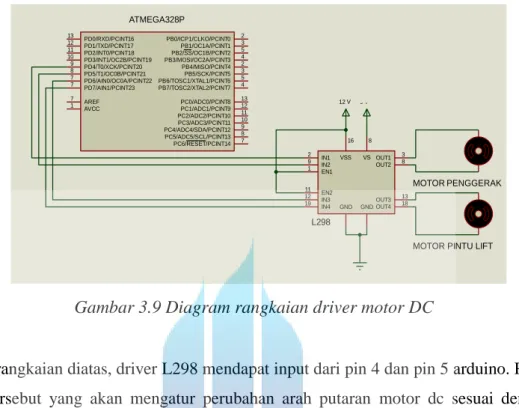
3.3.6 Rangkaian Driver Motor DC
Untuk mengendalikan perputaran motor dc dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor dc searah/berlawanan arah dengan arah jarum jam. Mikrokontroler tidak dapat langsung mengendalikan putaran motor dc, karena itu dibutuhkan driver sebagai perantara antara mikrokontroler dan motor dc, sehingga perputaran dari motor dc dapat dikendalikan oleh mikrokontroler.
PB0/ICP1/CLKO/PCINT0 2 PB1/OC1A/PCINT1 3 PB3/MOSI/OC2A/PCINT3 4 PB2/SS/OC1B/PCINT2 5 PD6/AIN0/OC0A/PCINT22 7 PD5/T1/OC0B/PCINT21 8 PD4/T0/XCK/PCINT20 9 PD3/INT1/OC2B/PCINT19 10 PD2/INT0/PCINT18 11 PD1/TXD/PCINT17 12 PD0/RXD/PCINT16 13 PB4/MISO/PCINT4 2 PB5/SCK/PCINT5 3 PB7/TOSC2/XTAL2/PCINT7 4 PB6/TOSC1/XTAL1/PCINT6 5 PC6/RESET/PCINT14 7 PC5/ADC5/SCL/PCINT13 8 PC4/ADC4/SDA/PCINT12 9 PC3/ADC3/PCINT11 10 PC2/ADC2/PCINT10 11 PC1/ADC1/PCINT9 12 PC0/ADC0/PCINT8 13 AVCC 1 AREF 7 PD7/AIN1/PCINT23 7 ATMEGA328P MOTOR PENGGERAK
MOTOR PINTU LIFT
12 V 5 V IN1 2 OUT1 3 OUT2 8 OUT3 13 OUT4 18 IN2 9 IN3 12 IN4 19 EN1 1 EN2 11 VS 8 VSS 16 GND GND L298
Pada tugas akhir ini rangkaian driver motor dc menggunakan modul motor shield L298. Diagram rangkaian driver motor dc L298 dengan ATMega 329 ditunjukkan pada gambar 3.8 berikut ini :
Gambar 3.9 Diagram rangkaian driver motor DC
Pada rangkaian diatas, driver L298 mendapat input dari pin 4 dan pin 5 arduino. Pin – pin tersebut yang akan mengatur perubahan arah putaran motor dc sesuai dengan perintah yang diberikan. Driver L298 mendapat tegangan kerja sebesar 5 volt dc. Sedangkan untuk menggerakkan motor dc dibutuhkan power input sebesar 12 volt dc.
3.4 Perangkat Lunak (Software)
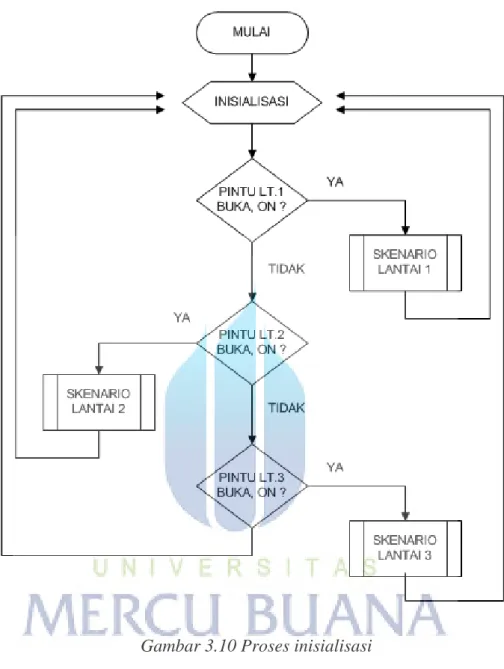
3.4.1 Diagram Flow Chart
Mikrokontroler sebagai otak pengendali tidak begitu saja dapat bekerja secara otomatis mengendalikan komponen-komponen dalam rangkaian yang telah tersusun. Diperlukan perangankat lunak atau program yang berisi intruksi-intruksi dalam bahasa C yang nantinya ditanamkan pada chip mikrokontroler sebagai pengendali komponen-komponen agar dapat bekerja sebagaimana mestinya. Untuk mempermudah perancangan perangkat lunak tersebut, terlebih dahulu dibuat diagram alur (flowchart) yang harus dikerjakan oleh mikrokontroler seperti tampak gambar dibawah ini :
PB0/ICP1/CLKO/PCINT0 2 PB1/OC1A/PCINT1 3 PB3/MOSI/OC2A/PCINT3 4 PB2/SS/OC1B/PCINT2 5 PD6/AIN0/OC0A/PCINT22 7 PD5/T1/OC0B/PCINT21 8 PD4/T0/XCK/PCINT20 9 PD3/INT1/OC2B/PCINT19 10 PD2/INT0/PCINT18 11 PD1/TXD/PCINT17 12 PD0/RXD/PCINT16 13 PB4/MISO/PCINT4 2 PB5/SCK/PCINT5 3 PB7/TOSC2/XTAL2/PCINT7 4 PB6/TOSC1/XTAL1/PCINT6 5 PC6/RESET/PCINT14 7 PC5/ADC5/SCL/PCINT13 8 PC4/ADC4/SDA/PCINT12 9 PC3/ADC3/PCINT11 10 PC2/ADC2/PCINT10 11 PC1/ADC1/PCINT9 12 PC0/ADC0/PCINT8 13 AVCC 1 AREF 7 PD7/AIN1/PCINT23 7 ATMEGA328P MOTOR PENGGERAK
MOTOR PINTU LIFT
12 V 5 V IN1 2 OUT1 3 OUT2 8 OUT3 13 OUT4 18 IN2 9 IN3 12 IN4 19 EN1 1 EN2 11 VS 8 VSS 16 GND GND L298
Secara garis besar urutan perintah pada prototype elevator atau lift ini dapat dilihat pada flow chart diatas. Sistem akan melihat apakah ada panggilan atau tidak, ditandai dengan tekanan tombol pada lantai yang terletak didalam ataupun diluar lift. Jika salah satu tombol ditekan maka sistem akan mengaktifkan program sesuai dengan skenarionya, sehingga lift akan bergerak naik ataupun turun ke lantai yang dituju. Setelah lift berhenti (level) maka sistem langsung mengaktifkan program untuk proses buka atau tutup pintu lift. Pada saat pintu lift mulai terbuka sampai terbuka penuh dan mulai tertutup lagi, controller akan selalu melihat apakah tombol tutup pintu manual (tombol tutup pintu) aktif atau tidak. Jika tombol ini atif maka controller akan segera menutup kembali pintu lift. Jik tidak maka proses membuka pintu dilanjutkan sampai pintu terbuka penuh (full open). Informasi terbuka atau tertutup penuh pintu atau dimana secara langsung menghentikan pintu (door stop) didapat dari dua buah limit switch yang terdapat pada kedua tepi pintu elevator.
Setelah pintu terbuka penuh dan tidak ada permintaan tutup manual maka sistem akan menunggu sekitar 5 detik sebelum menutup pintu secara otomatis. Saat pintu mulai tertutup samapai tertutup penuh controller akan melihat apakah ada permintaan buka pintu manual atau tidak. Jika tombol buka pintu lift aktif maka controller akan segera membuka pintu kembali. Namun jika sampai pintu tertutup penuh tidak ada permintaan buka manual maka sistem akan meneruskan proses yaitu naik atau turun sesuai urutan pada program utama.