BAB III PERANCANGAN
Bab ini membahas tentang perancangan subsistem citra digital kamera yang diterapkan pada sistem Moge Human Traflower. Untuk itu, perancangan ini dilakukan dengan menggunakan HSV color space sebagai metode digital image processing. Selain itu, dalam bab ini juga menjelaskan tentang blok diagram, data flow diagram (DFD), flowchart, dan prosedur pengujian yang diperlukan.
3.1 Metodologi Penelitian
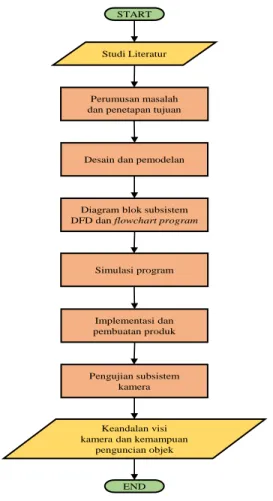
Langkah-langkah yang dilakukan ditunjukkan pada Gambar 3.1 meliputi hal-hal sebagai berikut.
1. Studi Literatur
Pada tahap ini dilakukan kajian secara teoritis dari berbagai sumber referensi seperti jurnal, artikel, prosiding, video pembelajaran, dan internet mengenai komponen, software, dan metode terkait digital image processing.
2. Perumusan Masalah dan Penetapan Tujuan Penelitian Bagian ini berisi tentang perumusan masalah mengenai latar belakang yaitu merancang sistem digital image processing citra agar dapat mengidentifikasi pola dan warna pada objek, serta bertujuan untuk mepengaruhi pengambilan keputusan terkait objek yang akan diikuti pada sistem Moge Human Traflower.
3. Desain dan Pemodelan
Selama proses ini dilakukan perancangan tentang subsistem citra digital kamera menggunakan bahasa pemrograman Python dengan software bundle Anaconda Individual Edition versi 1.10.0 yang tersedia secara gratis dan bersifat open- source sehingga menghasilkan blok diagram, DFD, dan flowchart yang dibuat dengan menggunakan Microsoft Power Point.
16 4. Simulasi Program
Bagian ini dilakukan simulasi terhadap program yang telah dibuat menggunakan bahasa pemrograman Python mengenai kemampuan kamera dalam menemukan warna objek dari pengguna, penguncian objek, dan kemampuan object tracking.
5. Implementasi dan Pembuatan Prototype Subsistem Kamera
Proses ini meliputi kemampuan subsistem citra digital kamera diimplementasikan pada sistem Moge Human Traflower.
6. Pengujian Subsistem
Pada tahap ini sistem yang telah terimplementasi dilakukan pengujian keandalan yang meliputi visi kamera, kemampuan penguncian objek yang ada pada pengguna dan object tracking.
Gambar 3.1 Flowchart langkah kerja
START
Studi Literatur
Perumusan masalah dan penetapan tujuan
Desain dan pemodelan
Diagram blok subsistem DFD dan flowchart program
Simulasi program
Implementasi dan pembuatan produk
Pengujian subsistem kamera
Keandalan visi kamera dan kemampuan
penguncian objek
END
17 3.2 Desain Produk
Produk Moge Human Traflower ini berupa cart persegi panjang dapat mengikuti pengguna secara otomatis menggunakan kamera. Produk ini dilengkapi kamera USB Nemesis seri A80 dan terhubung pada mikrokontroler yakni Raspberry Pi 3 Model B.
Didukung oleh baterai aki 12 V, 5 AH beserta adaptor charger aki, sehingga memungkinkan produk bertahan lama saat digunakan. Adapun komponen elektronika lain yang digunakan antara lain sensor tegangan 25 V, konverter MCP3008, modul digital scale Hx711, driver motor L298N, dan motor DC 12 V, 400 rpm. Berdasarkan [46] rangka dimensi produk memiliki panjang 60 cm, lebar 45 cm, dan tinggi 25 cm dan berat keseluruhan rangka dan elektronik sebesar 5 − 7 kg. Penampilan keseluruhan ditunjukkan pada Gambar 3.2.
Gambar 3.2 Rancangan desain produk dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge Human Traflower) untuk
dicantumkan pada skripsi ini
18 3.3 Sistem Produk
Moge Human Traflower terdiri atas tiga subsistem utama yang saling terkonfigurasi satu sama lain [14], [15], yaitu citra digital kamera, akusisi data, dan kendali seperti ditunjukkan pada Gambar 3.3. Setiap subsistem memiliki fungsi dan peranannya masing-masing dalam melakukan pengendalian sistem.
1. Subsistem Citra Digital Kamera
Subsistem ini terdapat komponen yang memiliki peranan penting dalam mengendalikan produk. Kamera merupakan komponen utama yang digunakan untuk mengenali dan membaca objek dalam bentuk pola dan warna.
2. Subsistem Akuisisi Data
Bagian ini merupakan interface untuk mempermudah penguna dalam mengoperasian produk, yang selanjutnya mengandung komponen elektrik seperti mini PC, baterai, liquid crystal display (LCD), sensor tegangan, dan digital scale [15].
3. Subsistem Kendali
Berfungsi untuk menggerakkan koper dengan menggunakan motor DC komponen utama penggerak dan driver motor DC sebagai pengatur kecepatan [14].
19
Gambar 3.3 Blok DFD tingkat nol dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge Human Traflower) untuk
dicantumkan pada skripsi ini 3.4 Perancangan Subsistem Citra Digital Kamera
Perancangan subsistem citra digital kamera dilakukan menggunakan bahasa pemrograman Python dengan library utama OpenCV sebagai metode pembelajaran pada mesin untuk dapat melihat seperti layaknya manusia. Komponen yang digunakan adalah kamera USB Nemesis seri A80 yang dihubungkan dengan Raspberry Pi 3 Model B sebagai sensor untuk dapat mendeteksi objek berupa pola dan warna yang ada pada pengguna. Selanjutnya objek yang terdeteksi akan diproses menggunakan metode HSV color space untuk dilakukan pengolahan citra digital.
3.4.1 Perancangan Desain Sistem Pengolahan Citra Digital
Input pada pengolahan citra digital diperoleh melalui kamera Nemesis seri A80 sebagai sensor yang terkonfigurasi dengan mikrokontroler untuk menggerakan roda. Sementara itu, agar kamera mendeteksi pengguna, maka diperlukan serangkaian pemrosesan citra digital menggunakan metode HSV dan threshold. Hubungan digital image processing
Mini PC Subsistem Akuisisi
Data [15]
Subsistem Kendali [14]
User Subsistem Citra Digital Kamera
Daya
Data Sensor
Daya
Data Pergerakan
Tampilan Layar Tekan
Tombol
20
yang diterapkan pada kamera ditampilkan dalam bentuk blok DFD tingkat satu pada Gambar 3.4 dan dijelaskan pada Tabel 3.1.
Tabel 3.1 Penjelasan blok DFD tingkat satu subsistem citra digital kamera
Parameter Keterangan
Input Video dari kamera (objek dan warna) Output Object tracking dan penguncian objek
Fungsi Mengetahui posisi pengguna sehingga produk dapat mengikuti pengguna
Gambar 3.4 Blok DFD tingkat satu subsistem citra digital kamera dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge
Human Traflower) untuk dicantumkan pada skripsi ini Kamera
Open CV
Object Tracking HSV Subsistem Citra Digital Kamera
Video
Frame Video Capture
Batas Warna
21
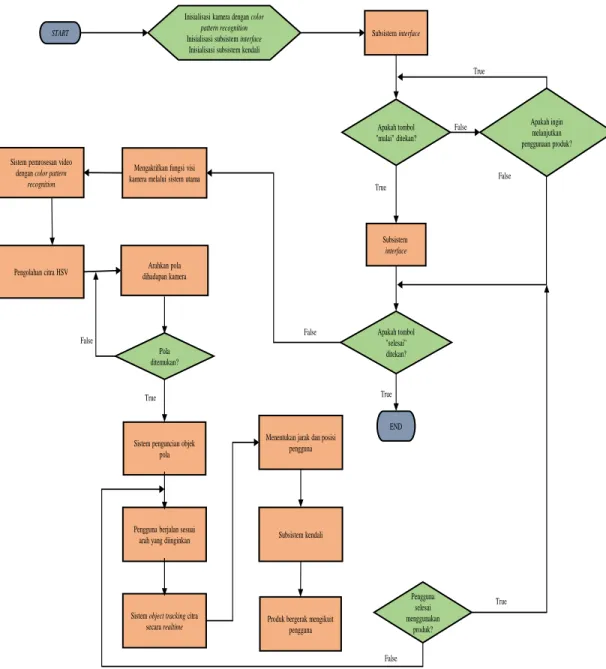
3.4.2 Perancangan Program Digital Image Processing
Flowchart program rancangan subsistem citra digital kamera untuk melakukan pengolahan citra digital ditunjukkan pada Gambar 3.5 yang dilakukan menggunakan library OpenCV dan numpy.
Gambar 3.5 Flowchart subsistem citra digital kamera
START
Inisialisasi kamera dengan color pattern recognition Inisialisasi subsistem interface
Inisialisasi subsistem kendali
Subsistem interface
Apakah tombol
"mulai" ditekan?
Subsistem interface
Apakah tombol
"selesai"
ditekan?
Apakah ingin melanjutkan penggunaan produk?
END Sistem pemrosesan video
dengan color pattern recognition
Pengolahan citra HSV
Mengaktifkan fungsi visi kamera melalui sistem utama
Arahkan pola dihadapan kamera
Pola ditemukan?
Sistem penguncian objek pola
Sistem object tracking citra
secara realtime Produk bergerak mengikuit
pengguna Menentukan jarak dan posisi
pengguna
Subsistem kendali
Pengguna selesai menggunakan
produk?
Pengguna berjalan sesuai arah yang diinginkan
False
False False
True
True True
True
False
False
True
22 3.5 Prosedur Pengujian
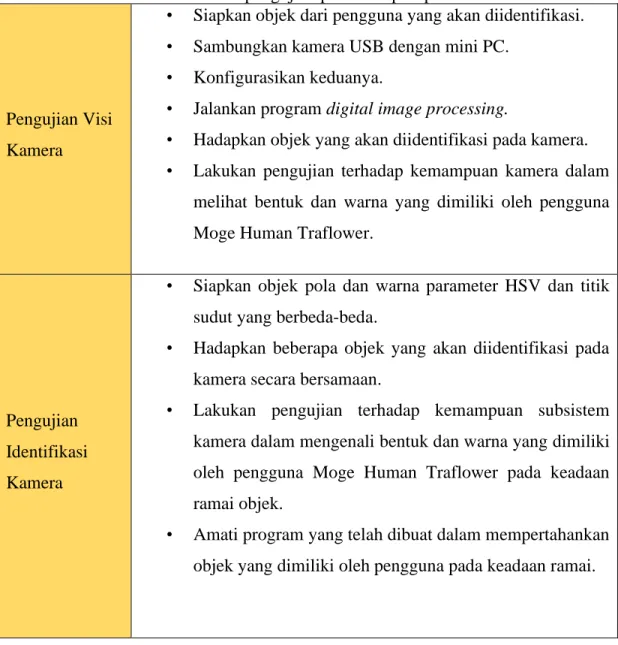
Prosedur yang perlu dilakukan pada subsistem citra digital kamera ini terdiri dari tiga bagian yaitu pengujian visi kamera, penguncian objek pengguna, dan kemampuan object tracking. Langkah yang perlu dilakukan pada setiap bagian pengujian dijelaskan pada Tabel 3.2 sebagai berikut.
Tabel 3.2 Metode pengujian pada setiap implementasi
Pengujian Visi Kamera
• Siapkan objek dari pengguna yang akan diidentifikasi.
• Sambungkan kamera USB dengan mini PC.
• Konfigurasikan keduanya.
• Jalankan program digital image processing.
• Hadapkan objek yang akan diidentifikasi pada kamera.
• Lakukan pengujian terhadap kemampuan kamera dalam melihat bentuk dan warna yang dimiliki oleh pengguna Moge Human Traflower.
Pengujian Identifikasi Kamera
• Siapkan objek pola dan warna parameter HSV dan titik sudut yang berbeda-beda.
• Hadapkan beberapa objek yang akan diidentifikasi pada kamera secara bersamaan.
• Lakukan pengujian terhadap kemampuan subsistem kamera dalam mengenali bentuk dan warna yang dimiliki oleh pengguna Moge Human Traflower pada keadaan ramai objek.
• Amati program yang telah dibuat dalam mempertahankan objek yang dimiliki oleh pengguna pada keadaan ramai.
23 Pengujian
Object Tracking
• Siapkan objek pola dan warna yang dapat terdeteksi oleh sistem.
• Hadapkan objek tersebut ke arah kamera.
• Gerakan objek secara acak ke arah kanan, kiri, maju, mundur, atas, atau bawah secara kontinyu.
• Perhatikan kontur fokus pada sistem pengolahan citra digital dalam melakukan object tracking.
• Amatilah kemampuan sistem dalam me-track objek.
![Gambar 3.2 Rancangan desain produk dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge Human Traflower) untuk](https://thumb-ap.123doks.com/thumbv2/123dok/2189514.4046856/3.918.259.741.276.778/gambar-rancangan-diizinkan-anggota-autonomous-travelling-follower-traflower.webp)
![Gambar 3.3 Blok DFD tingkat nol dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge Human Traflower) untuk](https://thumb-ap.123doks.com/thumbv2/123dok/2189514.4046856/5.918.238.721.174.489/gambar-tingkat-diizinkan-anggota-autonomous-travelling-follower-traflower.webp)
![Gambar 3.4 Blok DFD tingkat satu subsistem citra digital kamera dari [46] dan diizinkan oleh anggota tim autonomous luggage human travelling follower (Moge](https://thumb-ap.123doks.com/thumbv2/123dok/2189514.4046856/6.918.181.780.289.918/gambar-tingkat-subsistem-digital-diizinkan-autonomous-travelling-follower.webp)