TUGAS AKHIR
RAHMAT WARISTON SINAMBELA 172408053
PROGRAM STUDI D 3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
ULTRASONIK DAN BUZZER
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
RAHMAT WARISTON SINAMBELA 172408053
PROGRAM STUDI D 3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
ii
PERNYATAAN ORISINALITAS
SIMULASI RADAR MINI MENGGUNAKAN SENSOR ULTRASONIK DAN BUZZER
TUGAS AKHIR
Saya menyatakan bahwa laporan tugas proyek ini adalah hasil karya sendiri kecuali beberapa kutipan dan ringkasan yang masing – masing disebutkan sumbernya.
Medan, 14 Juli 2020
Rahmat Wariston Sinambela 172408053
“SIMULASI RADAR MINIMENGGUNAKAN SENSOR ULTRASONIK DAN BUZZER”
ABSTRAK
Radar adalah singkatan dari Radio Detection and Ranging dimana merupakan sistem elektromagnetik untuk mendeteksi dan memberi informasi lokasi dari material yang memantulkan sinyal elektromagnetik. Radar konvensional berukuran besar banyak digunakan pada industri aeronautika untuk mendeteksi pesawat danperalatan luar angkasa, pada bidang kelautan untuk mendetaksi kapal, pada bidang geografi untuk pemetan wilayah dan pendeteksi cuaca. Radio Detecting and Ranging (Radar) merupakan suatu perangkat yang digunakan untuk menentukan posisi objek, arah pergerakannya, kecepatan benda yang bergerak, maupun bentuk dari suatu objek yang terdeteksi. Pada mulanya radar digunakan sebagai salah satu alat pendeteksi musuh saat perang. Tetapi saat ini radar tidak hanya digunakan pada bidang militer, tapi juga digunakan pada penerbangan, perkiraan cuaca, kepolisian , kapal nelayan dan kapal pesiar. Radar bekerja dengan menggunakan gelombang radio yang dipantukan dari permukaan objek. Gelombang elektromagnetik memiliki spektrum yang sangat luas, namun untuk teknologi radar kebanyakan menggunakan gelombang radio sebagai media transmisinya.
Kata kunci : sistem radar, sensor ultrasonik, buzzer, arduino
iv
“SIMULATION RADAR MINI USING ULTRASONIC SENSOR AND BUZZER”
ABSTRACT
Radar is an abbreviation of Radio Detection and Ranging which is an electromagnetic system to detect and provide information on the location of materials that reflect electromagnetic signals. Large conventional radar is widely used in the aeronautical industry to detect aircraft and space equipment, in the marine field to detect ships, in the field of geography for area picking and weather detection. Radio Detecting and Ranging (Radar) is a device used to determine the position of an object, the direction of its movement, the speed of an object moving, and the shape of an object that is detected. At first, radar was used as a means of detecting enemies during war. But this time radar is not only used in the military field, but also used in aviation, weather forecasts, police, fishing boats and cruise ships. Radar works by using radio waves reflected from the surface of an object. Electromagnetic waves have a very broad spectrum, but for most radar technology using radio waves as a transmission medium.
Keywords: radar system, ultrasonic sensor, buzzer, arduino
KATA PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada TYME, dengan dilimpah karunia-Nya penulis dapat menyelesaikan penyusunan Proyek ini.
Ucapan terima kasih penulis sampaikan Kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaikan Laporan Proyek ini yaitu Kepada:
1. Bapak Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs.Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika Fakultas MIPA Universitas Sumatra Utara .
3. Bapak Dr.Bisman Parangin-angin selaku Pembimbing yang telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Laporan Proyek .
4. Seluruh Staf Pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara .
5. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Proyek.
6. Saudara saya Rivanly Sinambela dan Saudari saya Elvitry Sinambela, Ayu Sinambela dan Ruth Sinambela yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Proyek.
7. Untuk Windy Hasianku Yang telah membantu dan menyemangati serta menginspirasi untuk menyelesaikan laporan proyek ini.
vi
8. Rekan Fisika Instrumentasi D 3 Fisika yang memberikan bantuan penulisan untuk menyelesaikan Laporan.
Medan, 14 Juli 2020
Rahmat Wariston Sinambela 172408053
DAFTAR ISI
PERNYATAAN ORISINALITAS i
LEMBAR PENGESAHAN ii
ABSTRAK iii
ABSTRACK iv
KATA PENGHARGAAN v
DAFTAR ISI vi
DAFTAR GAMBAR vii
DAFTAR TABEL viii
BAB I PENDAHULUAN
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Tujuan 2
1.4 Batasan Masalah 2
1.5 Sistematika Penulisan 3
BAB II TINJAUAN PUSTAKA
2.1 Mikrokontroller 4
2.2 Arduino 10
2.3 Sensor Ultrasonik 16
2.3.1. Cara Kerja Sensor Ultrasonik 20 2.3.2. Sensor Jarak Ultrasonik HC-SR04 21
2.4 power supply 22
2.5 Motor Servo 24
2.6 Buzer 26
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
3.1 Metodologi Perancangan 27
3.2 Perancangan Sistem 31
3.3 Pengujian Rangkaian dan Pengukuran Hasil Sistem 39 BAB IV HASIL DAN PEMBAHASAN
4.1 Analisis Hasil Pengukuran 46
viii BAB V PENUTUP
5.1 Kesimpulan 49
5.2 Saran 49
DAFTAR PUSTAKA 50
LAMPIRAN 51
DAFTAR GAMBAR
Gambar 2.1 Skema Mikrokontroler 7
Gambar 2.2 Chip Mikrokontroler 9
Gambar 2.3 Arduino Uno 10
Gambar 2.4 Sensor Ultrasonik 17
Gambar 2.5 Rangkaian Pemancar Gelombang Ultrasonik 18 Gambar 2.6 Rangkaian Penerima Gelombang Ultrasonik 19
Gambar 2.7 Sensor Hcsr-04 21
Gambar 2.8 Sensor Jarak Hcsr-04 21
Gambar 2.9 Diagram Pengoperasian sensor komputer HC-SR 04 22
Gambar 2.10 Motor Servo SG90 25
Gambar 2.11 PiezoElectric Buzzer 28
Gambar 3.1 Layout PCB Mirkokontroler ATmega328 Atas 30 Gambar 3.2 Layout PCB Mirkokontroler ATmega328 Bawah 30 Gambar 3.3 Layout Rangkaian Motor Servo dan Buzzer 31
Gambar 3.4 Diagram Blok 31
Gambar 3.5 Rangkaian Mikrokontroler ATMEGA 328 32
Gambar 3.6 Rangkaian LCD 33
Gambar 3.7 Rangkaian Power Supply 34
Gambar 3.8 Motor Servo MG 995 35
Gambar 3.9 Sensor Ultrasonik Yang Digunakan 36
Gambar 3.10 Modul LCD TFT 1.8 Inch 128x160 36
Gambar 3.11 Flowchart 37
Gambar 3.12 Rangkaian LCD 40
Gambar 3.13 Rangkaian Power Supply 41
Gambar 3.14 Contoh Hasil Pengukuran Jarak Pada Serial Monitor 43 Gambar 3.15 Tampilan “Hello, World” Pada LCD 44
DAFTAR TABEL
Tabel 2.1 Skema Arduino Uno 11
Tabel 3.1 Koneksi Motor Servo Ke Rangkaian Mikrokontroler 35 Tabel 3.2 Koneksi Antara Pin Sensor Ultrasonik dan Rangkaian
Mikrokontroler Yang Digunakan 36 Tabel 3.3 Koneksi Antara Modul LCD TFT 1.8 Inch Dengan
Mikrokontroler yang digunakan 37 Tabel 3.4 Pengukuran jarak objek diluar ruangan 44 Tabel 3.5 Pengukuran jarak objek didalam ruangan 45
BAB I PENDAHULUAN 1.1 Latar Belakang
Keterbatasan pandangan dalam mendeteksi keberadaan objek sebagai akibat dari keterbatasan jarak pandang,kondisi cahaya maupun penghalang manjadi permasalahan pada aplikasi kontrol dan monitoring. Penggunaan radar menjadi salah satu solusi untuk mengatasi kondisi tersebut. Radar singkatan dari Radio Detection and Rangging adalah perangkat yang berfungsi untuk menentukan jarak,arah,atau kecepatan dari objek bergerak dan tetap (Rustamaji & Djaelani,2012). Radar dapat digunakan pada aplikasi pemetaan dan eksplorasi objek pada ruang yang tidak diketahui.Penggunaan radar juga dapat membantu navigasi objek bergerak (Hedgire & Killarikar,2017).
Implementasi radar dapat memamfaatkan prinsip pancaran dan pantulan gelombang elektromagnetik atau gelombang suara pada level energi dan selang waktu tertentu. Dengan melakukan penerapan komputasi matematis ,akan diperoleh sebuah gambaran visual representasi dari objek yang sedang diobservasi. Berdasarkan uraian yang telah dijelaskan mengenai mamfaat penggunaan radar dan studi yang berkaitan dengan implementasi radar ,maka sebuah sistem radar sangat berguna untuk memindai objek atau pemetaan suatu area. Pemilihan metode serta penggunaan material detector disesuaikan dengan kondisi keberadaan objek yaitu berpenghalang atau tanpa penghalang. Maka dari itu , judul dari tugas akhir ini adalah “ Desain Model Pembelajaran Radar Menggunakan Sensor Ultrasonik.
1.2 Rumusan Masalah
Berdasarkan berbagai hal yang telah dikemukakan diatas, maka rumusan masalah yang akan dikaji dalam tugas akhir ini adalah:
1. Bagaimana merancang suatu system pendeteksian benda
2. Bagaimana ketepatan sensor ultrasonik dalam mendeteksi suatu benda 3. Bagaimana prinsip kerja dari sensor ultrasonik dalam alat pendeteksi
benda
1.3 Tujuan
Adapun tujuan dari penulisan tugas akhir ini adalah 1. Sebagai persyaratan untuk membuat Tugas Akhir
2. Membuat dan memahami cara-cara membuat Tugas Akhir
3. Mengetahui dan memahami mikrokontroller arduino secara umum, sensor yang digunakan serta komponen yang terdapat pada pembuatan alat
1.4 Batasan Masalah
Pembatasan suatu masalah digunakan untuk menghindari adanya penyimpangan maupun pelebaran pokok masalah. Beberapa batasan masalah dalam penelitian ini adalah sebagai berikut:
1. Hasil pembacaan pendeteksi benda ditampilkan pada LCD berukuran 16x2 2. Hanya mendeteksi suatu benda pada jarak tertentu.
1.5 Sistematika Penulisan
Berikut merupakan sistem penulisan yang digunakan dalam penyusunan laporan proyek :
1. BAB I PENDAHULUAN
Bab ini berisi penjelasan mengenai latar belakang pemilihan judul, batasan masalah, motivasi dan tujuan tugas akhir, sasaran tugas akhir, metode tugas akhir dan sistematika penulisan.
2. BAB II LANDASAN TEORI
Bab ini berisi landasan teori yang menjadi referensi utama dalam penulisan tugas akhir. Teori yang dibahas berhubungan dengan sistem yang akan dibuat dan juga yang akan digunakan untuk kepentingan analisis dan perancangan.
3. BAB III PERANCANGAN DAN IMPLEMENTASI ALAT
Bab ini membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
4. BAB IV ANALISIS DAN PENGUJIAN
Bab ini membahas tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
5. BAB V KESIMPULAN DAN SARAN
Bab ini menjelaskan tentang kesimpulan dari pengujian dan saran masukan untuk mengembangkan dan melengkapi sistem yang sudah dibangun untuk masa mendatang.
BAB II LANDASAN TEORI 2.1 Mikrokontroler
Mikrokontroler adalah suatu kontroler yang digunakan untuk mengontrol suatu proses atau aspek-aspekdari lingkungan. Satu contoh aplikasi dari mikrokontroler adalah untuk memonitor rumah kita. Ketika suhu naik kontroler membuka jendela dan sebaliknya. Pada masanya, kontroler dibangun dari komponen-komponen logika secara keseluruhan, sehingga menjadikannya besar dan berat. Setelah itu barulah dipergunakan mikrokprosesor sehingga keseluruhan kontroler masuk kedalam PCB yang cukup kecil. Hingga saat ini masih sering kita lihat kontroler yang dikendalikan oleh mikroprosesor biasa. Proses pengecilan komponen terus berlangsung, semua komponen yangdiperlukan guna membangun suatu kontroler dapat dikemas dalam satu keping. Maka lahirlah komputer keping tunggal (one chip microcomputer) atau disebut juga mikrokontroler.
Mikrokontrolere adalah suatu IC dengan kepadatan yang sangat tinggi, dimana semua bagian yang diperlukan untuk suatu kontroler sudah dikemas dalam satu keping, biasanya terdiri dari:
1. CPU (Central Processing Unit) 2. RAM (Random Access Memory) 3. EEPROM/EPROM/PROM/ROM 4. I/O, Serial & Parallel
5. Timer
6. Interupt Controller
Rata-rata mikrokontroler memiliki instruksi manipulasi bit, akses ke I/O
secara langsung dan mudah, dan proses interupt yang cepat dan efisien. Dengan kata lainmikrokontroler adalah "Solusi satu Chip" yang secara drastic mengurangi jumlah komponen dan biaya disain (harga relatif rendah). Selain sebagai sistem monitor rumah seperti diatas, mikrokontroler sering dijumpai pada peralatan rumah tangga (microwave oven, TV, stereo set dll), komputer dan perlengkapannya, mobil dan lain sebagainya. Pada beberapa penggunaan bias ditemukan lebih dari satu prosesor didalamnya. Mikrokontroler biasanya digunakan untuk peralatan yang tidak terlalu membutuhkan kecepatan pemrosesan
yang tinggi.Walaupun mungkin ada diantara kita yang membayangkan untuk mengontrol oven microwave dengan menggunakan sistem berbasis Unix, mengendalikan oven microwave dapat dengan mudah menggunakan mikrokontroler yang paling kecil. Dilain pihak jika kita ingin mengendalikan rudal guna mengejar anjing tetangga yang selalu menyalak ditengah malam, kita akan memerlukan prosesor dengan kecepatan yang lebih tinggi. Sifat spesial dari mikrokontroler adalah kecil dalam ukuran, hemat daya listrik serta flexibilitasnya menyebabkan mikrokontroler sangat cocok untuk dipakai sebagai pencatat/perekam data pada aplikasi yang tidak memerlukan kehadiran operator.3.
Jenis yang dapat dipilih Mikrokontroler tersedia dalam beberapa pilihan, tergantung dari keperluan dan kemampuan yang diinginkan.Kita dapat memilih mikrokontroler 4, 8, 16 atau 32 bit. Disamping itu terdapat pula mikrokontroler dengan kemampuan komunikasi serial,penanganan keyboard, pemroses sinyal, pemroses video dll.
Mikrokontroler merupakan system computer yang mempunyai satu atau beberapa tugas yang sangat spesifik. Elemen mikrokontroler tersebut diantaranya adalah: a. Pemroses (processor)
b. Memori
c. Input dan output
Kadangkala pada microcontroller ini beberapa chip digabungkan dalam satu papan rangkaian. Perangkat ini sangat ideal untuk mengerjakan sesuatu yang bersifat khusus, sehingga aplikasi yang diisikan ke dalam komputer ini adalah aplikasi yang bersifat dedicated. Jika dilihat dari harga, microcontroller ini harga umumnya lebih murah dibandingkan dengan komputer lainnya, karena perangkatnya relatif sederhana. Mikrokontroller telah banyak digunakan di industri, walaupun penggunaannya masih kurang dibandingkan dengan penggunaan Programable Logic Control (PLC), tetapi microcontroller memiliki beberapa keuntungan dibandingkan dengan PLC.Ukuran microcontroller lebih kecil dibandingkan dengan suatu modul PLC sehingga peletakannya dapat lebih flexible. Microcontroller telah banyak digunakan pada berbagai macam peralatan rumah tangga seperti mesin cuci. Sebagai pengendali sederhana, microcontroller telah banyak digunakan dalam dunia medik, pengaturan lalu lintas, dan masih
banyak lagi. Contoh alat ini diantaranya adalah komputer yang digunakan pada mobil untuk mengatur kestabilan mesin, alat untuk pengatur lampu lalu lintas.
Secara teknis hanya ada 2 mikrokontroler yaitu RISC dan CISC, dan masing%masing mempunyai keturunan/keluarga sendiri sendiri. RISC kependekan dari Reduced Instruction Set Computer : instruksi terbatas tapi memiliki fasilitas yang lebih banyak CISC kependekan dari Complex Instruction Set Computer : instruksi bisa dikatakan lebih lengkap tapi dengan fasilitas secukupnya. Tentang jenisnya banyak sekali ada keluarga Motorola dengan seri 68xx, keluarga MCS51 yang diproduksi Atmel, Philip, Dallas, keluarga PIC dari Microchip, Renesas, Zilog. Masing-masing keluarga juga masih terbagi lagi dalam beberapa tipe.Jadi sulit sekali untuk menghitung jumlah mikrokontroler.
Yang perlu diketahui antara satu orang dengan orang lain akan berbeda dalam hal kemudahan dalam mempelajari. Jika anda terbiasa dengan bahasa pemrograman BASIC anda bisa menggunakan mikrokontroler BASIC Stamp, jika anda terbiasa dengan bahasa pemrograman JAVA anda bisa menggunakan Jstamp, jika anda terbiasa dengan bahasa pemrograman C++ bisa anda manfaatkan untuk keluarga MCS51 dan masih banyak lagi. Mikrokontroler mempunyai ruang alamat tersendiri yang disebut memori. Memori dalam mikrokontroler terdiri atas memori program dan memori data dimana keduanya terpisah, yang memungkinkan pengaksesan data memori dan pengalamatan 8 bit, sehingga dapat langsung disimpan dan dimanipulasi oleh mikrokontroler dengan kapasitas akses 8 bit.
Program memori tersebut bersifat hanya dapat dibaca (ROM/EPROM).
Sedangkan untuk data memori kita dapat menggunakan memori eksternal (RAM).
Di dalam mikrokontroler terdapat register-register yang memiliki fungsi yang khusus (Specilal Function Register). Sebagai contoh, untuk keluarga MCS%51 memiliki SFR dengan alamat 80H sampai FFH. Skema dari sebuah mikrokontroler dapat dilihat dari contoh berikut :
Gambar 2.1 Skema Mikrotroler
Mikrokontroler adalah suatu chip berupa IC (Integrated Circuit) yang dapat menerima sinyal input, mengolahnya dan memberikan sinyal output sesuai dengan program yang diisikan ke dalamnya. Sinyal input mikrokontroler berasal dari sensor yang merupakan informasi dari lingkungan sedangkan sinyal output ditujukan kepada aktuator yang dapat memberikan efek ke lingkungan. Jadi secara sederhana mikrokontroler dapat diibaratkan sebagai otak dari suatu perangkat/produk yang mempu berinteraksi dengan lingkungan sekitarnya.
Mikrokontroler pada dasarnya adalah komputer dalam satu chip, yang di dalamnya terdapat mikroprosesor, memori, jalur Input/Output (I/O) dan perangkat pelengkap lainnya. Kecepatan pengolahan data pada mikrokontroler lebih rendah jika dibandingkan dengan PC. Pada PC kecepatan mikroprosesor yang digunakan saat ini telah mencapai orde GHz, sedangkan kecepatan operasi mikrokontroler pada umumnya berkisar antara 1 – 16 MHz. Begitu juga kapasitas RAM dan ROM pada PC yang bisa mencapai orde Gbyte, dibandingkan dengan mikrokontroler yang hanya berkisar pada orde byte/Kbyte. Meskipun kecepatan pengolahan data dan kapasitas memori pada mikrokontroler jauh lebih kecil jika dibandingkan dengan komputer personal, namun kemampuan mikrokontroler sudah cukup untuk dapat digunakan pada banyak aplikasi terutama karena ukurannya yang kompak. Mikrokontroler sering digunakan pada sistem yang tidak terlalu kompleks dan tidak memerlukan kemampuan komputasi yang tinggi.
Sistem yang menggunakan mikrokontroler sering disebut sebagai embedded system atau dedicated system. Embeded system adalah sistem pengendali yang tertanam pada suatu produk, sedangkan dedicated system adalah sistem pengendali 6 7 yang dimaksudkan hanya untuk suatu fungsi tertentu. Sebagai contoh, printer adalah suatu embedded system karena di dalamnya terdapat mikrokontroler sebagai pengendali dan juga dedicated system karena fungsi pengendali tersebut berfungsi hanya untuk menerima data dan mencetaknya. Hal ini berbeda dengan suatu PC yang dapat digunakan untuk berbagai macam keperluan, sehingga mikroprosesor pada PC sering disebut sebagai general purpose microprocessor (mikroprosesor serba guna). Pada PC berbagai macam software yang disimpan pada media penyimpanan dapat dijalankan, tidak seperti mikrokontroler hanya terdapat satu software aplikasi. Penggunaan mikrokontroler antara lain terdapat pada bidang-bidang berikut ini.
1. Otomotif : Engine Control Unit, Air Bag, fuel control, Antilock Braking
System, sistem pengaman alarm, transmisi automatik, hiburan, pengkondisi udara, speedometer dan odometer, navigasi, suspensi aktif.
2. perlengkapan rumah tangga dan perkantoran : sistem pengaman alarm, remote control, mesin cuci, microwave, pengkondisi udara, timbangan digital, mesin foto kopi, printer, mouse.
3. pengendali peralatan di industri.
4. robotika.
Saat ini mikrokontroler 8 bit masih menjadi jenis mikrokontroler yang paling populer dan paling banyak digunakan. Maksud dari mikrokontroler 8 bit adalah data yang dapat diproses dalam satu waktu adalah 8 bit, jika data yang diproses lebih besar dari 8 bit maka akan dibagi menjadi beberapa bagian data yang masing-masing terdiri dari 8 bit. Masing-masing mikrokontroler mempunyai cara dan bahasa pemrograman yang berbeda, sehingga program untuk suatu jenis mikrokontroler tidak dapat dijalankan pada jenis mikrokontroler lain.
Untuk memilih jenis mikrokontroler yang cocok dengan aplikasi yang dibuat terdapat tiga kriteria yaitu:
1. Dapat memenuhi kebutuhan secara efektif & efisien. Hal ini menyangkut kecepatan, kemasan/packaging, konsumsi daya, jumlah RAM dan ROM, jumlah I/O dan timer, harga per unit. 8
2. Bahasa pemrograman yang tersedia.
3. Kemudahan dalam mendapatkannya.
Gambar 2.2 Chip Mikrokontroler
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Secara sederhana, komputerakan menghasilkan output spesifik berdasarkan inputan yang diterima dan program yang dikerjakan.
Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksiinstruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer. Mikrokontroler tersusun dalam satu chip dimana prosesor, memori, dan I/O terintegrasi menjadi satu kesatuan kontrol sistem sehingga mikrokontroler dapat dikatakan sebagai komputer mini yang dapat bekerja secara inovatif sesuai dengan kebutuhan sistem. Sistem running bersifat berdiri sendiri tanpa tergantung dengan komputer sedangkan parameter
komputer hanya digunakan untuk download perintah instruksi atau program.
Langkah-langkah untuk download komputer dengan mikrokontroler sangat mudah digunakan karena tidak menggunakan banyak perintah. Pada mikrokontroler tersedia fasilitas tambahan untuk pengembangan memori dan I/O yang disesuaikan dengan kebutuhan sistem. Harga untuk memperoleh alat ini lebih murah dan mudah didapat.
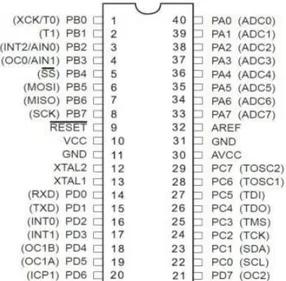
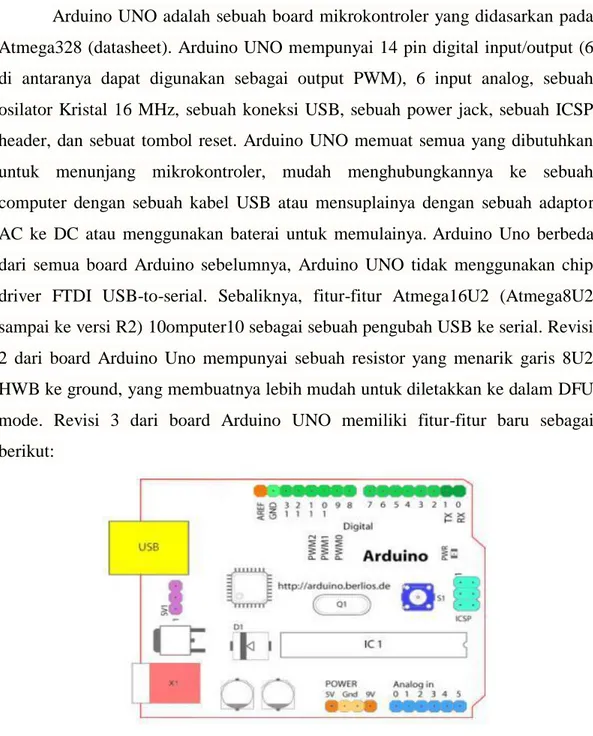
2.2 Arduino
Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada Atmega328 (datasheet). Arduino UNO mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino UNO memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah menghubungkannya ke sebuah computer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya. Arduino Uno berbeda dari semua board Arduino sebelumnya, Arduino UNO tidak menggunakan chip driver FTDI USB-to-serial. Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) 10omputer10 sebagai sebuah pengubah USB ke serial. Revisi 2 dari board Arduino Uno mempunyai sebuah resistor yang menarik garis 8U2 HWB ke ground, yang membuatnya lebih mudah untuk diletakkan ke dalam DFU mode. Revisi 3 dari board Arduino UNO memiliki fitur-fitur baru sebagai berikut:
Gambar 2.3 Arduino Uno
Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke depannya, shield akan dijadikan kompatibel/cocok dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya
Sirkit RESET yang lebih kuat
Atmega 16U2 menggantikan 8U2
“Uno” berarti satu dalam bahasa Italia dan dinamai untuk menandakan keluaran (produk) Arduino 1.0 selanjutnya. Arduino UNO dan versi 1.0 akan menjadi referensi untuk versi-versi Arduino selanjutnya. Arduino UNO adalah sebuah seri terakhir dari board Arduino USB dan model referensi untuk papan Arduino, untuk suatu perbandingan dengan versi sebelumnya, lihat indeks dari board Arduino.
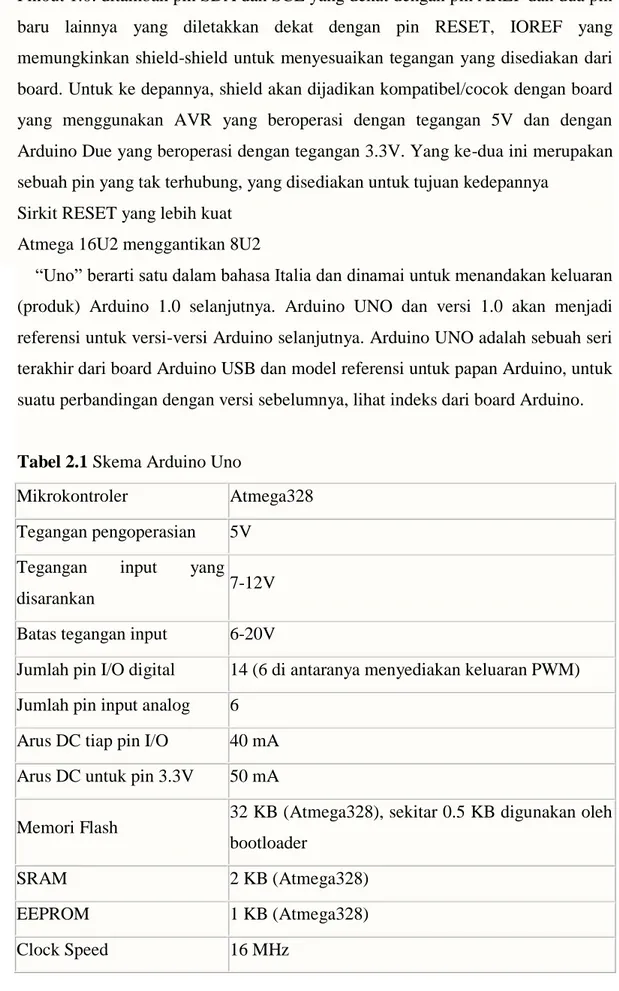
Tabel 2.1 Skema Arduino Uno
Mikrokontroler Atmega328
Tegangan pengoperasian 5V Tegangan input yang
disarankan 7-12V
Batas tegangan input 6-20V
Jumlah pin I/O digital 14 (6 di antaranya menyediakan keluaran PWM) Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA Arus DC untuk pin 3.3V 50 mA
Memori Flash 32 KB (Atmega328), sekitar 0.5 KB digunakan oleh bootloader
SRAM 2 KB (Atmega328)
EEPROM 1 KB (Atmega328)
Clock Speed 16 MHz
Referensi desain Arduino dapat menggunakan sebuah Atmega8, 168, atau 328, model saat ini menggunakan Atmega328, tetapi Atmega8 ditampilkan pada skema sebagai referensi. Konfigurasi pin 12ompute pada semua ketiga prosesor tersebut.
Daya (Power) Arduino UNO dapat disuplai melalui koneksi USB atau dengan sebuah power suplai eksternal.Sumber daya dipilih secara otomatis. Suplai eksternal (non-USB) dapat diperoleh dari sebuah adaptor AC ke DC atau battery.
Adaptor dapat dihubungkan dengan mencolokkan sebuah center-positive plug yang panjangnya 2,1 mm ke power jack dari board. Kabel lead dari sebuah battery dapat dimasukkan dalam header/kepala pin Ground (Gnd) dan pin Vin dari konektor POWER. Board Arduino UNO dapat beroperasi pada sebuah suplai eksternal 6 sampai 20 Volt. Jika disuplai dengan yang lebih kecil dari 7 V, kiranya pin 5 Volt mungkin mensuplai kecil dari 5 Volt dan board Arduino UNO 12omp menjadi tidak stabil. Jika menggunakan suplai yang lebih dari besar 12 Volt, voltage regulator 12omp kelebihan panas dan membahayakan board Arduino UNO. Range yang direkomendasikan adalah 7 sampai 12 Volt. Pin-pin dayanya adalah sebagai berikut:
VIN. Tegangan input ke Arduino board ketika board sedang menggunakan sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lainnya yang diatur). Kita dapat menyuplai tegangan melalui pin ini, atau jika penyuplaian tegangan melalui power jack, aksesnya melalui pin ini.
5V. Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada board. Board dapat disuplai dengan salah satu suplai dari DC power jack (7-12V), USB connector (5V), atau pin VIN dari board (7-12). Penyuplaian tegangan melalui pin 5V atau 3,3V membypass regulator, dan dapat membahayakan board.
Hal itu tidak dianjurkan.
3V3. Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus maksimum yang dapat dilalui adalah 50 mA.
GND. Pin ground.
Atmega328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader).
Atmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis (RW/read and written) dengan EEPROM library).
Input dan Output Setiap 14 pin digital pada Arduino Uno dapat digunakan sebagai input dan output, menggunakan fungsi pin Mode(), digital Write(), dan digital Read(). Fungsi-fungsi tersebut beroperasi di tegangan 5 Volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai fungsi-fungsi komputer:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan memancarkan (TX) serial data TTL (Transistor-Transistor Logic). Kedua pin ini dihubungkan ke pin-pin yang sesuai dari chip Serial Atmega8U2 USB-ke- TTL.
2. External Interrupts: 2 dan 3. Pin-pin ini dapat dikonfigurasikan untuk dipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatu perubahan nilai. Lihat fungsi attach Interrupt() untuk lebih jelasnya.
3. PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsi analog Write().
4. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakan SPI library.
5. LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13.
Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
Arduino UNO mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda). Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya dengan menggunakan pin AREF dan fungsi analog Reference(). Di sisi lain, beberapa pin mempunyai fungsi komputer:
TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library
Ada sepasang pin lainnya pada board: AREF. Referensi tegangan untuk input analog. Digunakan dengan analog Reference().
Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang
memblock sesuatu pada board.Lihat juga pemetaan antara pin Arduino dengan port Atmega328. Pemetaan untuk Atmega8,168,dan atmega328 adalah komputer.
Arduino UNO mempunyai sejumlah fasilitas untuk komunikasi dengan sebuah komputer, Arduino lainnya atau mikrokontroler lainnya. Atmega 328 menyediakan serial komunikasi UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 pada channel board serial komunikasinya melalui USB dan muncul sebagai sebuah port virtual ke software pada 14omputer.
Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan. Bagaimanapun, pada Windows, sebuah file inf pasti dibutuhkan. Software Arduino mencakup sebuah serial monitor yang memungkinkan data tekstual terkirim komputer dari board Arduino. LED RX dan TX pada board akan menyala ketika data sedang ditransmit melalui chip USB-to- serial dan koneksi USB pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah Software Serial library memungkinkan untuk komunikasi serial pada beberapa pin digital UNO. Atmega328 juga mensupport komunikasi I2C (TWI) dan SPI. Software Arduino mencakup sebuah Wire library untuk memudahkan menggunakan bus I2C, lihat dokumentasi untuk lebih jelas.
Arduino UNO dapat komputer dengan software Arduino (download).Pilih
“Arduino Uno dari menu Tools >Board (termasuk mikrokontroler pada board).
Untuk lebih jelas, lihat referensi dan tutorial. Atmega328 pada Arduino Uno hadir dengan sebuah bootloader yang memungkinkan kita untuk mengupload kode baru ke Atmega328 tanpa menggunakan pemrogram hardware eksternal. Atmega328 berkomunikasi menggunakan 14omputer STK500 asli (referensi, file Cheader) Kita juga dapat membypass bootloader dan program mikrokontroler melalui kepala/header ICSP (In-Circuit Serial Programming); lihat instruksi untuk lebih jelas Sumber kode firmware Atmega16U2 (atau 8U2 pada board revisi 1 dan revisi 2) tersedia. Atmega16U2/8U2 diload dengan sebuah bootloader DFU, yang dapat diaktifkan dengan:
Pada board Revisi 1: Dengan menghubungkan jumper solder pada belakang board (dekat peta Italy) dan kemudian mereset 8U2
Pada board Revisi 2 atau setelahnya: Ada sebuah resistor yang menarik garis HWB 8U2/16U2 ke ground, dengan itu dapat lebih mudah untuk meletakkan ke
dalam mode DFU. Kita dapat menggunakan software Atmel‟s FLIP (Windows) atau pemrogram DFU (Mac OS X dan Linux) untuk meload sebuah firmware baru. Atau kita dapat menggunakan header ISP dengan sebuah pemrogram eksternal (mengoverwrite bootloader DFU). Lihat tutorial user-contributed ini untuk informasi selengkapnya.
Reset Otomatis (Software) Dari pada mengharuskan sebuah penekanan fisik dari tombol reset sebelum sebuah penguploadan, Arduino Uno didesain pada sebuah cara yang memungkinkannya untuk direset dengan software yang sedang berjalan pada pada komputer yang sedang terhubung. Salah satu garis kontrol aliran hardware (DTR) dari Atmega328 dihubungkan ke garis reset dari Atmega328 melalui sebuah kapasitor 100 nanofarad. Ketika saluran ini dipaksakan (diambil rendah), garis reset jatuh cukup panjang untuk mereset chip.
Software Arduino menggunakan kemampuan ini untuk memungkinkan kita untuk mengupload kode dengan mudah menekan tombol upload di software Arduino.Ini berarti bahwa bootloader dapat mempunyai sebuah batas waktu yang lebih singkat, sebagai penurunan dari DTR yang dapat menjadi koordinasi yang baik dengan memulai penguploadan. Pengaturan ini mempunyai implikasi. Ketika Arduino Uno dihubungkan ke sebuah 15omputerlain yang sedang running menggunakan OS Mac X atau Linux, Arduino Uno mereset setiap kali sebuah koneksi dibuat dari software (melalui USB). Untuk berikutnya, setengah-detik atau lebih, bootloader sedang berjalan pada Arduino UNO. Ketika Arduino UNO komputer untuk mengabaikan data yang cacat/salah (contohnya apa saja selain sebuah penguploadan kode baru) untuk menahan beberapa bit pertama dari data yang dikirim ke board setelah sebuah koneksi dibuka. Jika sebuah sketch sedang berjalan pada board menerima satu kali konfigurasi atau data lain ketika sketch pertama mulai, memastikan bahwa software yang berkomunikasi menunggu satu detik setelah membuka koneksi dan sebelum mengirim data ini.
Arduino Uno berisikan sebuah jejak yang dapat dihapus untuk mencegah reset otomatis. Pada bsalah satu sisi dari jejak dapat disolder bersama untuk mengaktifkan kembali. Pad itu diberi label “RESET-RN” Kita juga dapat menonaktifkan reset otomatis dengan menghubungkan sebuah resistor 110 ohm dari tegangan 5V ke garis reset; lihat thread forum ini untuk lebih jelasnya.
Proteksi Aruslebih USB Arduino UNO mempunyai sebuah sebuah sekring reset yang memproteksi port USB komputer dari hubungan pendek dan arus lebih.
Walaupun sebagian besar komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan koneksi sampai hubungan pendek atau kelebihan beban hilang. Panjang dan lebar maksimum dari PCB Arduino UNO masing-masingnya adalah 2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas dimensinya. Empat lubang sekrup memungkinkan board untuk dipasangkan ke sebuah permukaan atau kotak.
Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil.(0.16”), bukan sebuah kelipatan genap dari jarak 100 mil dari pin lainnya.
2.3 Sensor Ultrasonik
Sensor komputer adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz. Sensor komputer terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima Di dalam robotika, sensor sonar mempunyai tiga tujuan yang berbeda, tetapi berhubungan,yaitu : Penghindaran rintangan (Obstacle avoidance), Pemetaan sonar (Sonar Mapping) dan Pengenalan objek (Object recognition). Prinsip Kerja dari sensor ultrasonic yaitu sinyal dipancarkan oleh pemancar komputer. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s.
Setelah sinyal tersebut sampai di penerima komputer, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Sensor jarak komputer ping adalah sensor 40 khz produksi parallax yang banyak digunakan untuk aplikasi atau kontes robot cerdas. Sensor SFR04 adalah sensor computer yang diproduksi oleh Devantech. Sensor ini merupakan sensor jarak yang presisi. Dapat melakukan pengukuran jarak 3 cm sampai 3 meter dan sangat mudah untuk dihubungkan ke mikrokontroler menggunakan sebuah pin Input dan pin Output. Modul Sensor Ultrasonik (sensor PING) merupakan input utama rangkaian yang memancarkan gelombang indicator setelah menerima trigger dari mikrokontroler. Setelah
menerima pantulan gelombang tersebut, modul sensor PING akan mengirimkan sinyal kembali ke mikrokontroler.
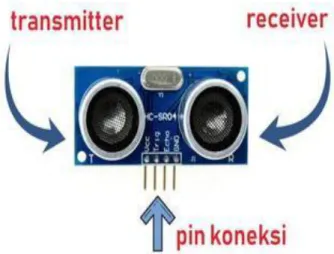
Gambar 2.4 Sensor Ultrasonik
Sensor komputer adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz. Sensor komputer terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah komputer piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar.
Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari komputer piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang komputer yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang komputer akan terjadi bila ada objek tertentu, dan pantulan gelombang komputer akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
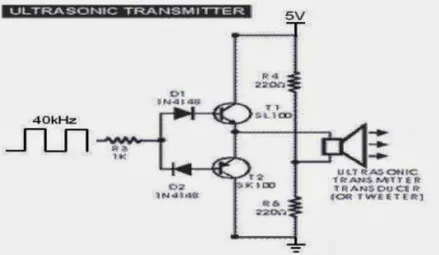
a. Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonic
Gambar 2.5 Rangkaian Pemancar Gelombang Ultrasonik Prinsip kerja dari rangkaian pemancar gelombang komputer tersebut adlah sebagai berikut :
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju rangkaian komputer dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah komputer dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati komputer D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektor T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati komputer D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V.
Sehingga pemancar komputer akan menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d – 2,5 V).
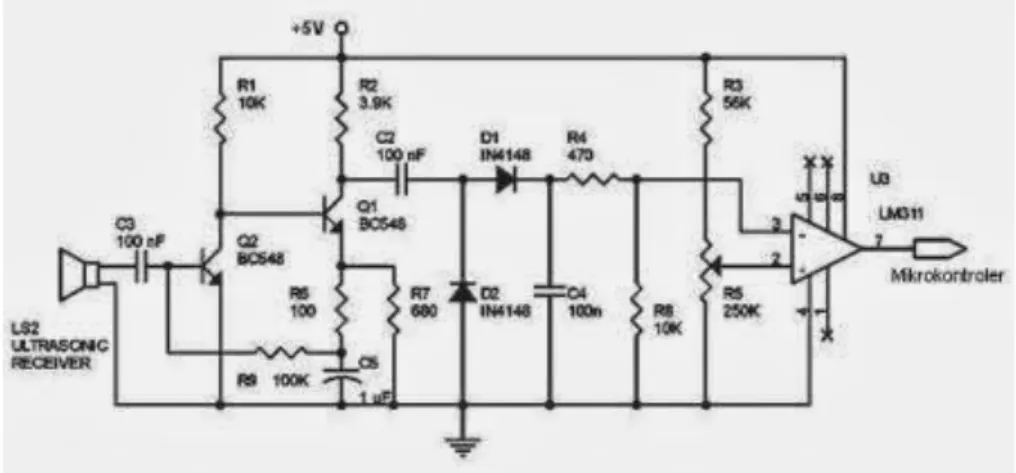
b. Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal komputer yang dipancarkan oleh pemancar komputer dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika „1‟) sedangkan jarak yang lebih jauh adalah low (logika‟0‟).Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).
Gambar 2.6 Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang komputer tersebut adalah sebagai berikut :
1. Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian 19ompu D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi
< 40kHz melalui rangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
6. Jadi ketika ada sinyal komputer yang masuk ke rangkaian, maka pada komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
2.3.1. Cara Kerja Sensor Ultrasonik
1. Sinyal dipancarkan oleh pemancar komputer. Sinyal tersebut berfrekuensi diatas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar komputer.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
3. Setelah sinyal tersebut sampai di penerima komputer, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus : S = 340.t/2 dimana S adalah jarak antara sensor komputer dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang komputer sampai diterima kembali oleh bagian penerima komputer.
Besar komputer sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran.
Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal komputer dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal komputer tersebut pada media rambat yang digunakannya, yaitu udara.
2.3.2 Sensor Jarak Ultrasonik HC-SR04
Sensor jarak ultrasonic HC-SR04 adalah sensor 40 KHz. HC-SR04 merupakan sensor komputer yang dapat digunakan untuk mengukur jarak antara penghalang
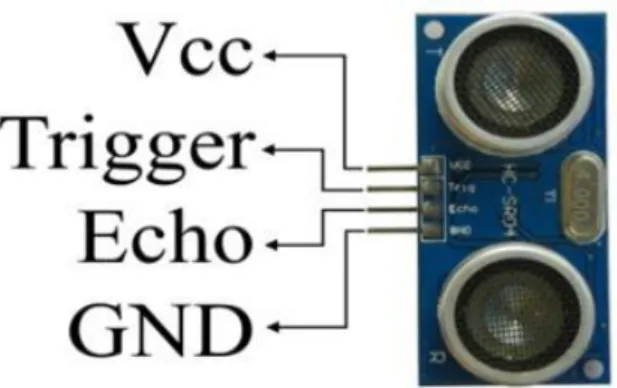
dan sensor. Konfigurasi pin dan tampilan sensor HC-SR04 diperlihatkan pada gambar.
Gambar 2.7 Sensor Hcsr-04
HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu ultrasonic transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter adalah memancarkan gelombang komputer dengan frekuensi 40 KHz kemudian ultrasonic receiver menangkap hasil pantulan gelombang komputer yang mengenai suatu objek.Waktu tempuh gelombang komputer dari pemancar hingga sampai ke penerima sebanding dengan 2 kali jarak antara sensor dan bidang pantul seperti yang diperlihatkan pada Gambar.
Gambar 2.8 Sensor Jarak Hcsr-04
Prinsip pengukuran jarak menggunakan sensor komputer HC-SR04 adalah, ketika pulsa trigger diberikan pada sensor, transmitter akan mulai memancarkan gelombang komputer, pada saat yang sama sensor akan menghasilkan output TTL
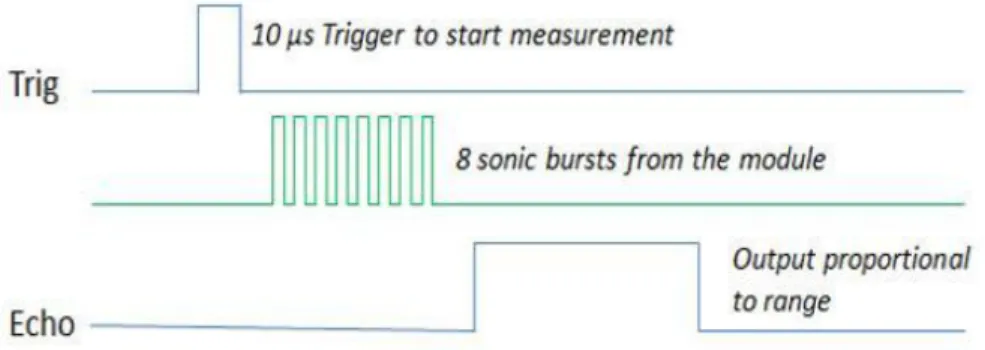
transisi naik menandakan sensor mulai menghitung waktu pengukuran, setelah receiver menerima pantulan yang dihasilkan oleh suatu objek maka pengukuran waktu akan dihentikan dengan menghasilkan output TTL transisi turun. Jika waktu pengukuran adalah t dan kecepatan suara adalah 340 m/s, maka jarak antara sensor dengan objek dapat dihitung dengan menggunakan Persamaan.S = 𝑡𝑥 340 𝑚/𝑠 2 Dimana : s = Jarak antara sensor dengan objek (m) t = Waktu tempuh gelombang komputer dari transmitter ke receiver (s) Pemilihan HC-SR04 sebagai sensor jarak yang akan digunakan pada penelitian ini karena memiliki fitur sebagai berikut; kinerja yang stabil, pengukuran jarak yang akurat dengan ketelitian 0,3 cm, pengukuran maksimum dapat mencapai 4 meter dengan jarak minimum 2 cm, ukuran yang ringkas dan dapat beroperasi pada level tegangan TTL Prinsip pengoperasian sensor komputer HC-SR04 adalah sebagai berikut ; awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan, kemudian berikan pulsa High (1) pada trigger selama 10 µs sehingga modul mulai memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga transisi naik terjadi pada output dan mulai perhitungan waktu hingga transisi turun terjadi, setelah itu gunakan Persamaan 2.1 untuk mengukur jarak antara sensor dengan objek. Timing diagram pengoperasian sensor komputer HC-SR04 diperlihatkan pada Gambar.
Gambar 2.9 Diagram pengoperasian sensor komputer HC-SR04
2.4 Power Supply
Pengertian Power Supply adalah sebagai alat atau perangkat keras yang mampu menyuplai tenaga atau tegangan listrik secara langsung dari sumber tegangan listrik ke tegangan listrik yang lainnya.Power supply biasanya
digunakan untuk komputer sebagai penghantar tegangan listrik secara langsung kepada komponen komponen atau perangkat keras lainnya yang ada di komputer tersebut, seperti hardisk, kipas, motherboard dan lain sebagainya. Power supply memiliki input dari tegangan yang berarus alternating current (AC) dan mengubahnya menjadi arus direct current (DC) lalu menyalurkannya ke berbagai perangkat keras yang ada dikomputer kita. Karena memang arus direct current (DC)-lah yang dibutuhkan untuk perangkat keras agar dapat beroperasi, direct current biasa disebut juga sebagai arus yang searah sedangkan alternating current merupakan arus yang berlawanan. Pengertian Power Supply secara umum dalam sebuah komputer adalah sebagai alat bantu komputer tegangan listrik pada komputer yang dapat mengubah tegangan listrik yang memiliki arus AC ke arus DC sehingga semua hardware yang membutuhkan tegangan listrik yang berarus DC mendapatkan tegangan listrik yang secara langsung diberikan oleh power supply ini. Power Supply adalah salah satu hardware di dalam perangkat komputer yang berperan untuk memberikan suplai daya. Biasanya komponen power supplay ini bisa ditemukan pada chasing komputer dan berbentuk persegi.
Pada dasarnya Power Supply membutuhkan sumber listrik yang kemudian diubah menjadi energi yang menggerakkan perangkat elektronik. Sistem kerjanya cukup sederhana yakni dengan mengubah daya 120V ke dalam bentuk aliran dengan daya yang sesuai kebutuhan komponen-komponen tersebut.Sesuai dengan pengertian power supply pada komputer, maka fungsi utamanya adalah untuk mengubah arus AC menjadi arus DC yang kemudian diubah menjadi daya atau energi yang dibutuhkan komponen-komponen pada komputer seperti motherboard, CD Room, Hardisk, dan komponen lainnya. Berdasarkan rancangannya, power supply dapat diklasifikasikan menjadi dua jenis, yaitu:
Power Supply/ Catu Daya Internal; yaitu power supply yang dibuat terintegrasi dengan motherboard atau papan rangkaian induk. Contohnya;
ampilifier, televisi, DVD Player; power supply-nya menyatu dengan motherboard di dalam chasing perangkat tersebut.
Power Supply/ Catu Daya Eksternal; yaitu power supply yang dibuat terpisah dari motherboard perangkat elektroniknya. Contohnya charger Laptop dan charger HP.
Mengacu pada pengertian power supply, perangkat keras ini berfungsi mengubah arus AC menjadi arus DC dan menyalurkannya ke berbagai komponen komputer di dalam chasing. Untuk membentuk tegangan maka dibutuhkan beberapa komponen, adapun komponen power supply adalah sebagai berikut:
1. Transformator
Ini merupakan komponen di dalam pada Power Supply yang digunakan untuk memindahkan tenaga listrik antar dua rangkaian listrik atau lebih melalui induksi elektromagnetik.
2. Dioda
Ini adalah gabungan dari dua kata elektroda, yaitu anoda dan katoda. Sifat dari dioda yaitu menghantarkan arus pada tegangan maju dan menghambat arus pada aliran tegangan balik.
3. Kapasitor
Kapasitor berfungsi sebagai penyempurna penyerahan dari tegangan arus AC ke tegangan arus DC.
4. Resistor
Resistor adalah perangkat yang membantu Power Supply dalam menurunkan tegangan, membagi tegangan, dan membatasi arus listrik yang masuk, sehingga akan dapat mengontrol perangkat-perangkat keras yang ada pada motherboard.
2.5 Motor Servo
Motor servo adalah Sebuah motor dengan sistem closed feedback dimana posisi dari motor akan dikonfirmasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari motor dc, rangkaian gear, potensiometer dan rangkaian kontrol. Untuk mengoperasikannnya yaitu dengan memberikan pulsa digital tertentu pada motor ini. Pada dasarnya penggunaan servo itu menggunakan cara yang samayaitu dengan memberikan lebar pulsa tertentu.
Hanya salah satu perbedaannya yaitu pada sudut putarnya adalah 180 derajat yang dapat dioperasikan dalam dua arah ( clock wise/counter clock wise).
Gambar 2.10 Motro Servo SG90
Hal paling utama dalam sistem pengontrolan robot berkaki yang sistem pergerakannya menggunakan motor servo adalah waktu pemberian data/lebar pulsa sinyal PWM pada motor servo dimana robot akan bergerak sesuai dengan posisi perputaran motor servo. Motor servo yang digunakan yaitu motor servo standar 1800 , motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 900 sehingga total defleksi sudut dari kanan – tengah – kiri adalah 1800 . Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 900 , maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 00 dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 1800 . Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 00 / netral). Sistem ini digunakan untuk mengontrol empat motor servo standar 1800 yang dipasang pada masing-masing kaki robot secara vertikal. Motor servo ini digunakan untuk menarik persendian pada kaki agar kaki-kaki robot dapat bergerak/terangkat dari bawah ke atas atau sebaliknya.
Untuk pengontrolan motor servo yang bergerak vertikal 1800 , prosesor utama (U1) mengirimkan data/sinyal pulsa (kontinyu) yang lebarnya 1.25 ms selama interval waktu tertentu sehingga sudut yang dicapai motor servo sebesar 00 , pada posisi ini keadaan kaki robot masih belum bergerak/terangkat.
2.6 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loudspeaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Pada umumnya, Buzzer yang merupakan sebuah perangkat audio ini sering digunakan pada rangkaian anti-maling, Alarm pada Jam Tangan, Bel Rumah, peringatan mundur pada Truk dan perangkat peringatan bahaya lainnya.
Jenis Buzzer yang sering ditemukan dan digunakan adalah Buzzer yang berjenis Piezoelectric, hal ini dikarenakan Buzzer Piezoelectric memiliki berbagai kelebihan seperti lebih murah, relatif lebih ringan dan lebih mudah dalam menggabungkannya ke Rangkaian Elektronika lainnya. Berikut ini adalah gambar bentuk dan struktur dasar dari sebuah Piezoelectric Buzzer.
Gambar 2.11 PiezoElectric Buzzer
3.1 Metodologi Perancangan 3.1.1 Tahap Persiapan
Adapun komponen yang digunakan dalam pembuatan alat tugas akhir ini yaitu:
1. Mikrokontroler ATmega328
ATMega 328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Pada alat ini, Mikrokontroler ATmega328 berfungsi sebagai pusat pengendali seluruh cara kerja dari sistem alat ini.
2. Sensor ultrasonik
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik). Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.
3. Buzzer
Buzzer adalah sebuah komponen elektronika yang dapat mengubah sinyal
listrik menjadi getaran suara. Pada umumnya, Buzzer yang merupakan sebuah perangkat audio ini sering digunakan pada rangkaian anti-maling, Alarm pada Jam Tangan, Bel Rumah, peringatan mundur pada Truk dan perangkat peringatan bahaya lainnya. Jenis Buzzer yang sering ditemukan dan digunakan adalah Buzzer yang berjenis Piezoelectric, hal ini dikarenakan Buzzer Piezoelectric memiliki berbagai kelebihan seperti lebih murah, relatif lebih ringan dan lebih mudah dalam menggabungkannya ke Rangkaian Elektronika lainnya. Buzzer yang termasuk dalam keluarga Transduser ini juga sering disebut dengan Beeper.
4. Power Supply
Catu daya atau power supply adaptor adalah sebuah peralatan penyedia tegangan atau sumber daya untuk peralatan elektronika dengan prinsip mengubah tegangan listrik yang tersedia dari jaringan distribusi transmisi listrik menuju level yang diinginkan sehingga berimplikasi pada pengubahan daya listrik. Dalam sistem pengubahan daya. Jika suatu catu daya bekerja dengan beban maka terdapat keluaran tertentu dan jika beban tersebut dilepas maka tegangan keluar akan naik, persentase kenaikan tegangan dianggap sebagai regulasi dari catu daya tersebut. Regulasi adalah perbandingan perbedaan tegangan yang terdapat pada tegangan beban penuh. Agar tegangan keluaran catu daya lebih stabil, dapat digunakan suatu komponen.
Dalam sistem pengubahan daya jika suatu catu daya bekerja dengan beban maka terdapat keluaran tertentu dan jika beban tersebut dilepas maka tegangan keluar akan naik, persentase kenaikan tegangan dianggap sebagai regulasi dari catu daya tersebut. Regulasi adalah perbandingan perbedaan tegangan yang terdapat pada tegangan beban penuh. Agar tegangan keluaran catu daya lebih stabil, dapat digunakan suatu komponen IC regulator. misalnya IC Regulator 7812 atau IC Regulator 7805.
5. Motor servo
Motor servo adalah motor yang mampu bekerja dua arah CW (Clock Wise) dan CCW (Counter Clock Wise) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal
PWM pada bagian pin kontrolnya. Servo biasa digunakan untuk steering/kemudi pada pesawat atau mobil RC, untuk lengan robot, untuk pengarah sensor dan untuk keperluan lain yang membutuhkan gerakan. Servo dapat digerakkan dengan mengirimkan pulsa tegangan 5V DC yang diulang setiap 20 milidetik.
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
3.1.2 Tahap Pembuatan Sistem 3.1.2.1 Perancangan PCB
Siapkan skema rangkaian yang akan di buat. Ubah skema rangkaian tersebut menjadi bentuk tata letak dan tata jalur pada kertas. Siapkan PCB polos.
Bersihkan lapisan tembaga yang menempel pada PCB dengan menggunakan amplas halus ( kertas gosok) dan air. Sehingga permukaan PCB akan terlihat bersih. Gambar tata jalur pada bagian sisi tembaga di PCB dengan menggunakan spidol permanen atau pun rugos. Lebar jalur yang digunakan adalah 0,8 s/d 1mm.
Jika menggunakan rugos , pilih pola jalur yang lurus dan tipis serta pola lobang.
Gunakan cutter untuk memotong jalur-jalur tersebut. Pastikan stiap jalur telah dibuat sudah sesuai dengan yang telah digambar skema rangkaian.Perhatikan jalur yang tersambung dan jalur yang tidak tersambung. Potong PCB sesuai dengan ukuran tata jalur yang telah di gambar. Agar proses etching (peleburan tembaga dengan larutan FeCl3) tidak memerlukan waktu lama. Larutkan tembaga pada PCB dengan menggunakan larutan FeCl3. Dengan wadah plastik dan air panas.
Pada umumnya, air panas dan air dingin dapat digunakan dalam proses etching, tetapi air panas dapat melarutkan tembaga lebih cepat daripada air dingin.
Masukkan FeCl3 secukupnya pada wadah plastik yang telah terisi dengan air panas, kemudian masukkan PCB ke larutan tersebut. Goyangkan wadah plastik secara perlahan untuk mempercepat proses pelarutan tembaga pada PCB.
Umumnya proses etching tidak memerlukan waktu lama.Jika tembaga pada PCB yang tidak terkena tinta telah luntur, maka proses etching telah selesai. Setelah proses etching selesai, keluarkan PCB dari larutan dan bilas dengan air. Gunakan kertas gosok untuk membersihkan tinta-tinta yang menempel pada PCB hingga jalur-jalur tembaga pada PCB terlihat. Lalu keringkan PCB. Siapkan bor listrik dengan mata bor diameter 0,8 s/d 1mm. Lalu lobangi jalur yang membentuk pola lobang( lingkaran). Setelah pengeboran selesai bersihkan PCB dengan kertas gosok kembali dan bilas dengan air.
Gambar 3.1 Layout PCB Mirkokontroler ATmega328 Atas
Gambar 3.2 Layout PCB Mirkokontroler ATmega328 Bawah
Gambar 3.3. Layout Rangkaian Motor Servo dan Buzzer 3.2 Perancangan Sistem
3.2.1 Diagram Blok
Gambar 3.4 Diagram Blok
3.2 Fungsi dari Setiap komponen yang Digunakan
1. Mikrokontroler berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program, dan terdiri dari CPU (Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
2. Power Supply berfungsi sebagai pemberi suatu tegangan serta arus listrik kepada komponen - komponen komputer lainnya yang telah terpasang dengan baik pada motherboard atau papan induk, sedang tujuan awal dari MIKROKONTROLER
SENSOR ULTRASONIK HC SR04
MOTOR SERVO
LCD DISPLAY 128X 160 POWER SUPLAY
BUZZER
penyaluran arus listrik ini adalah agar perangkat atau komponen - komponen komputer lainnya bisa berfungsi sebagaimana mestinya sesuai dengan tugasnya.
3. Sensor Ultrasonik Hcsr-04 berfungsi untuk mengukur jarak antara penghalang dan sensor.
4. Motor Servo berfungsi sebagai perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo).
5. Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara getaran listrik menjadi getaran suara.
3.2.2 Perancangan Rangkaian
3.2.2.1 Rangkaian Mikrokontroler ATMega328
Rangkaian ini merupakan otak dari alat yang dibuat.Rangkaian ini menggunakan mikrokontroler ATMega328 sebagai pusat dari pemrosesan data.
Berikut gambar rangkaian yang digunakan pada alat ini:
Gambar 3.5 Rangkaian Mikrokontroler ATMEGA 328
Rangkaian ini terbagi atas 2 bagian utama, yaitu rangkaian minimum mikrokontroler ATMega328 dan rangkaian komunikasi mikrokontroler.
Rangkaian minimum mikrokontroler terdiri dari rangkaian Reset yang dibentuk oleh R1, dan kemudian rangkaian pembangkit clock yang terdiri dari kristal Q1 dan 2 buah kapasitor C1 dan C2. Konektor J1 digunakan sebagai jalur pengisian bootloader mikrokontroler. C3 digunakan sebagai filter tegangan yang masuk ke mikrokontroler. LED1 diperlukan sebagai indikator ada atau tidaknya tegangan pada mikrokontroler Ketika sudah dihubungkan ke power supply. LED2 digunakan sebagai sarana pengujian rangkaian ketika rangkaian sudah dibuat.
Bagian lainnya adalah bagian komunikasi. Rangkaian ini digunakan sebagai jalur untuk memasukkan program ke memori mikrokontroler. Rangkaian ini dibangun dari IC CH340G yang merupakan konverter komunikasi USB ke UART-TTL. Ini diperlukan agar mikrokontroler yang hanya mempunyai fasilitas komunikasi serial UART-TTL dapat berkomunikasi dengan PC yang mempunyai fasilitas port USB. Sebagai pembangkit clock pada rangkaian komunikasi ini, digunakan kristal Q2, dan C4, C5.
3.2.2.2 Perancangan Rangkaian LCD
Berikut merupakan gambar rangkaian LCD yang digunakan pada alat yang dibuat:
Gambar 3.6 Rangkaian LCD
Rangkaian ini dibangun dari sebuah IC PCF8574T yang berperan untuk mengkonversi perintah yang didapat melalui komunikasi I2C menjadi logika digital di tiap pin outputnya (P0 s.d. P7). Logika – logika digital tersebut lah yang menjadi logika untuk mengaktifkan LCD.Dengan demikian, untuk mengendalikan LCD, mikrokontroler hanya membutuhkan 2 pin yaitu pin SDA dan SCL. Pin 1,2, dan 3 dari IC PCF8574T dihubungkan pada resistor pull-up yang mengakibatkan logikanya selalu bernilai 1. Sesuai dengan datasheet IC ini, jika di pin-pin tersebut diberika logika 1, maka address untuk pemrograman ic ini akan menjadi 0x27.
Trimpot R4 digunakan untuk mengatur kontras dari karakter yang muncul pada saat LCD dinyalakan.
3.2.2.3 Perancangan Rangkaian Power Supply
Berikut merupakan rangkaian power supply yang digunakan pada alat ini:
Gambar 3.7 Rangkaian Power Supply
Agar alat dapat digunakan, maka dibutuhkan sebuah catu daya yang memberikan daya pada seluruh rangkaian.Sensor, display dan mikrokontroler umumnya menggunakan tegangan 5V DC agar dapat bekerja. Untuk itu dibangun sebuah system power supply yang mempunyai output 5V DC.Rangkaian ini dibangun dari IC LM2576 yang merupakan ic converter penurun tegangan.
Rangkaian jenis ini dipilih karena lebih efisien dibanding dengan linear regulator biasa.LM2576 merupakan IC regulator switching yang mampu memberikan arus 3A pada tegangan 5V.Regulator jenis ini hanya memerlukan sedikit komponen tambahan untuk dapat dioperasikan.
3.2.2.4 Rangkaian Motor Servo
Sebagai actuator pada alat yang dibuat, digunakan motor servo. Motor servo digunakan karena penggunaannya yang mudah, dan torsi putaran relatif lebih besar jika dibanding motor jenis lainnya pada tegangan kerja yang sama.
Motor servo yang digunakan pada alat ini adalah motor servo MG995 yang mempunyai torsi maksimum 8,5 kgf.cm pada tegangan 4,8V DC. Putaran motor servo ini diatur oleh lebar pulsa yang masuk ke pin data motor ini. Untuk penggunaannya, cukup dengan menghubungkan pin data motor servo ke pin PWM pada mikrokontroler. Kemudian kita dapat mengatur lebar pulsa yang masuk ke motor servo melalui fitur PWM pada mikrokontroler.
Gambar 3.8 Motor Servo MG995
Tabel 3.1 Koneksi Motor Servo Ke Rangkaian Mikrokontroler Kabel Motor
Servo
Deskripsi Pin Mikrokontroler
Coklat Power
GND
GND
Oranye Data PWM
Merah Power +5V +5V
3.2.2.5 Rangkaian Sensor Ultrasonik
Sensor ultrasonic yang digunakan pada alat ini adalah sensor ultrasonic SR04.
Terdapat 4 pin pada sensor ini. Tidak diperlukan komponen tambahan untuk menghubungkan sensor ini dengan mikrokontroler yang digunakan.Berikut merupakan table koneksi sensor ini dengan mikrokontroler yang digunakan.
Tabel 3.2 Koneksi Antara Pin Sensor Ultrasonik dan Rangkaian Mikrokontroler Yang Digunakan
Pin Sensor Ultrasonik
Pin Mikrokontroler
Trig (Trigger) 3
Echo 2
VCC +5V
GND GND
Gambar 3.9 Sensor Ultrasonik Yang Digunakan
3.2.2.6 Modul LCD TFT 1.8 Inch 128x160
Untuk menampilkan hasil pendeteksian benda pada alat ini, digunakan modul LCD. Modul LCD yang digunakan adalah Modul LCD TFT 1.8 Inch dengan resolusi gambar 128x160. Untuk mengatur penampilan data pada lcd ini, lcd ini berkomunikasi dengan mikrokontroler menggunakan protocol SPI.
Secara hardware, tidak diperlukan komponen tambahan untuk menghubungkan modul lcd ini dengan mikrokontroler. Berikut merupakan gambar dari modul LCD ini dan table koneksi antara modul LCD ini dengan pin mikrokontroler yang digunakan.
Gambar 3.10 Modul LCD TFT 1.8 Inch 128x160
Tabel 3.3 Koneksi Antara Modul LCD TFT 1.8 Inch Dengan Mikrokontroler yang digunakan
Pin Module LCD TFT 1.8 Inch
Pin Rangkaian Mikrokontroler
LED 3.3 V
SCK 13
SDA 11
A0 atau DC 9
RESET 8
CS 10
GND GND
VCC +5V
3.2.3 Perancangan Perangkat Lunak Sistem 3.2.3.1 Flowchart
Inisialisasi sensor, servo dan display
Mulai
Posisikan servo ke 0°
Posisi servo + 1°
Jarak ≤300cm ? Tampilkan garis merah di LCD iya
Tidak