BAB 2
TINJAUAN PUSTAKA
2.1 Mikrokontroler
Mikokontroler merupakan sebuah sistem komputer yang seluruh atau sebagian besar
elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip
microcomputer. Mikrokontroler merupakan sebuah sistem komputer yang
mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan PC
(Personal Computer) yang memiliki beragam fungsi. Perbedaan yang lainnya adalah
perbandingan RAM dan ROM yang sangat berbeda antara computer dengan
mikrokontroler. Dalam mikrokontrolerROM jauh lebih besar dibandingkan RAM,
sedangkan dalam computer atau PC, RAM jauh lebih besar disbanding ROM.
Setelah mengalami perkembangan, teknologi mikrokontroler mengalami
peningkatan yang terjadi pada tahun 1996 s/d 1998 ATMEL mengeluarkan teknologi
mikrokontroler terbaru berjenis AVR (Alf and Vegard’s Risc processor) yang
menggunakan teknologi RISC (Reduce Instruction Set Computer) dengan keunggulan
lebih banyak dibandingkan pendahulunya, yaitu mikrokontroler jenis MCS.
Mikrokontroler jenis MCS memiliki kecepatan frekuensi kerja 1/12 kali frekuensi
osilator yang digunakan sedangkan pada kecepatan frekuensi kerja AVR sama
dengan kecepaatan frekuensi kerja osilator yang digunakan. Jadi apabila
menggunakan frekuensi osilator yang sama, maka AVR mempunyai kecepatan kerja
12 kali lebih cepat dibandingkan dengan MCS. Dalam peancangan alat ini
mikrokontroler yang digunakan adalah ATMEGA8 yang merupakan produksi
ATMEL yang berjenis AVR.
AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC
yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler dengan
konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan
maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan ATmega8L
2.1.1 Memori AVR ATMega8
Memori atmega terbagi menjadi tiga yaitu :
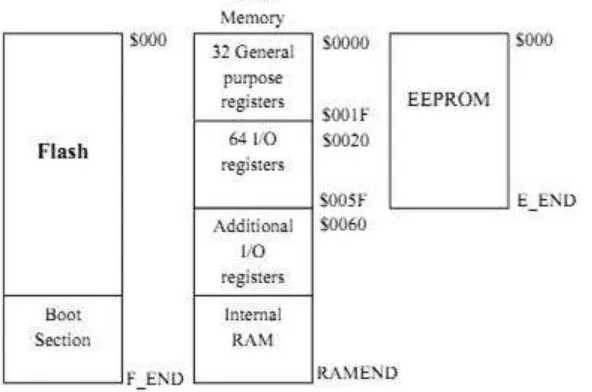
a. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada. Kata
flash menunjukan jenis ROM yng dapat ditulis dan dihapus secara elektrik. Memori
flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian
aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian
yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis
bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
Gambar 2.1 Peta Memory ATMEGA8
b. Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan program.
Memori data terbagi menjadi empat bagian yaitu : 32 GPR (General Purphose
Register) adalah register khusus yang bertugas untuk membantu eksekusi program
oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus
melibatkan GPR.
Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik
komputer sahari-hari GPR dikenal sebagai “chace memory”.I/O register dan
Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan
berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan
lain-lain.
Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagai SFR
(Special Function Register).
c. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off),
digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu
daya.
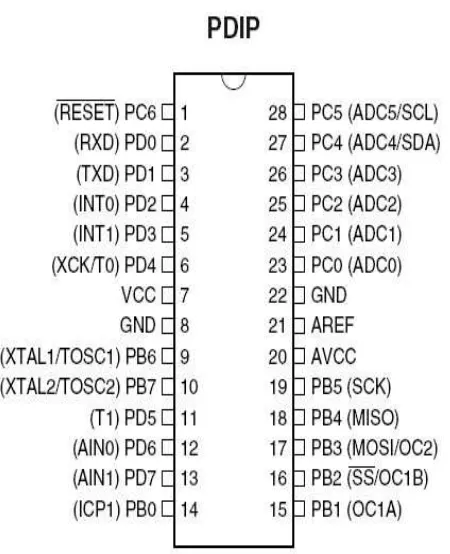
2.1.2 Pin Pada Mikrokontroler ATMega8
ATmega8 memiliki 28 pin, yang masing-masing pin nya memiliki fungsi yang
berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan
fungsi dari masing-masing kaki ATmega8.
a. VCC Merupakan supply tegangan digital.
b. GND Merupakan ground untuk semua komponen yang membutuhkan
grounding.
c. Port B (PB7...PB0) Didalam Port B terdapat XTAL1, XTAL2, TOSC1,
TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan
B.7. Tiap pin dapat digunakan sebagai input maupun output. Port B
merupakan sebuah 8-bit bi- directional I/O dengan internal pull-up resistor.
Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal
diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan.
Khusus PB6 dapat digunakan sebagai input Kristal (inverting oscillator
amplifier) dan input ke rangkaian clock internal, bergantung pada pengaturan
Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7
dapat digunakan sebagai output Kristal (output oscillator amplifier)
bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber
dapat digunakan sebagai I/O atau jika menggunakan maka PB6 dan PB7
(TOSC2 dan TOSC1) digunakan untuk saluran input timer.
Tabel 2.1. Fungsi Alternatif Port B
d. Port C (PC5…PC0) Port C merupakan sebuah 7-bit bi-directional I/O port
yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin nya
hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai
keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap
arus (sink) ataupun mengeluarkan arus (source). ADC 6 channel
(PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10bit. ADC dapat kita
gunakan untuk mengubah input yang berupa tegangan analog menjadi data
digital. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada
PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain
yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer
nunchuck, dll.
e. RESET/PC6 Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi
sebagai pin I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin
yang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak
diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level
pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun
clock-nya tidak bekerja. RESET merupakan salah satu pin penting di
mikrokontroler, RESET dapat digunakan untuk merestart program. Pada
ATMega8 pin RESET digabungkan dengan salah satu pin IO (PC6). Secara
default PC6 ini di disable dan diganti menjadi pin RESET. Kita dapat
melakukan konfigurasi di fusebit untuk melakukan pengaturannya.
Tabel 2.2. Fungsi Alternatif Port C
f. Port D (PD7…PD0) Port D merupakan 8-bit bi-directional I/O dengan
internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain.
Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada
port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut
dengan I/O.
USART (TXD dan RXD) merupakan jalur data komunikasi serial
dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial,
sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk
menerima data serial. Interrupt (INT0 dan INT1) merupakan pin dengan
fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan
sebagai selaan dari program, misalkan pada saat program berjalan kemudian
terjadi interupsi hardware/software maka program utama akan berhenti dan
akan menjalankan program interupsi. XCK dapat difungsikan sebagai sumber
clock external untuk USART, namun kita juga dapat memanfaatkan clock dari
CPU, sehingga tidak perlu membutuhkan external clock. T0 dan T1 berfungsi
sebagai masukan counter external untuk timer 1 dan timer 0. AIN0 dan AIN1
keduanya merupakan masukan input untuk analog comparator.
g. Avcc, Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini
harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan
untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja
disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC
digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter.
Gambar 2.2. Konfigurasi Pin Atmega8
2.1.3 Komunikasi Serial Pada ATMega8
Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2 dan Pin 3 untuk
melakukan komunikasi data antara mikrokontroler dengan mikrokontroler ataupun
mikrokontroler dengan komputer.
USART dapat difungsikan sebagai transmisi data sinkron, dan asinkron.
Sinkron berarti clock yang digunakan antara transmiter dan receiver satu sumber
clock.
Sedangkan asinkron berarti transmiter dan receiver mempunyai sumber clock
sendiri-sendiri. USART terdiri dalm tiga blok yaitu clock generator, transmiter, dan
receiver.
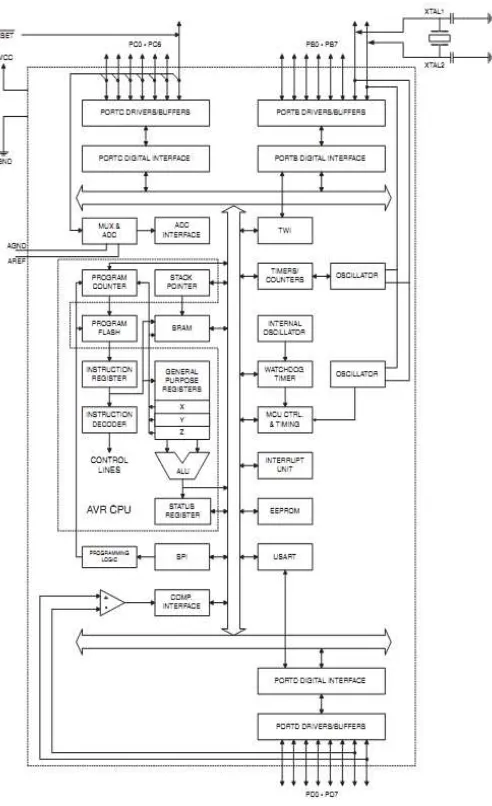
Gambar 2.3. Blok Diagram ATmega8 2.1.5 Kelebihan Mikrokontroler AVR ATMega8
Mikrokontroler AVR ATmega8 merupakan CMOS dengan konsumsi daya rendah,
mempunyai 8-bit proses data (CPU) berdasarkan arsitektur AVR RISC. Dengan
mengeksekusi instruksi dalam satu (siklus) clock tunggal, ATmega8 memiliki
kecepatan data rata-rata (throughputs) mendekati 1 MIPS per MHz, yang
memungkinkan perancang sistem dapat mengoptimalkan konsumsi daya dan
kecepatan pemrosesan. Berikut kelebihan yang dimiliki ATmega8 :
Seperti yang disebutkan Atmel dalam websitenya "The low-power Atmel 8-bit
AVR RISC-based microcontroller... The device supports throughput of 16 MIPS at 16
MHz and operates between 2.7-5.5 volts". AVR (Alf (Egil Bogen) and Vegard
(Wollan) 's Risc processor) mengeluarkan ATmega8 dengan fitur yang sangat
menarik untuk dicoba. Selama ini Penulis masih merasakan bahwa ATmega8 sangat
bagus dalam hal kinerja, cocok untuk penelitian, pembuatan produk, bahkan untuk
pembelajaran Robotik. Disamping kinerjanya yang handal, ATmega8 juga hemat
energi (daya rendah), karena mampu beroperasi pada tegangan 2,7 sampai 5,5 Volt,
dan hanya mengkonsumsi arus sebesar 3,6 mA.
2. Kemajuan Arsitektur RISC
Mikrokontroler AVR memiliki arsitektur Reduced Instruction Set Computing
(RISC) atau "set instruksi Komputasi yang disederhanakan". Arsitektur Reduced
Instruction Set Computing (RISC) atau "Set instruksi Komputer yang
disederhanakan" pertama kali digagas oleh John Cocke, peneliti dari IBM di
Yorktown, New York pada tahun 1974 saat ia membuktikan bahwa sekitar 20%
instruksi pada sebuah prosesor ternyata menangani sekitar 80% dari keseluruhan
kerjanya.
Komputer pertama yang menggunakan konsep RISC ini adalah IBM PC/XT
pada era 1980-an. Istilah RISC sendiri pertama kali dipopulerkan oleh David
Patterson, pengajar pada University of California di Berkely . Atmel AVR adalah
jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan
instrumentasi.
Mikrokontroler AVR ini memiliki arsitektur RISC delapan bit, di mana semua
instruksi dikemas dalam kode 16-bit (16 bits word) dan sebagian besar instruksi
dieksekusi dalam 1 (satu ) siklus clock.
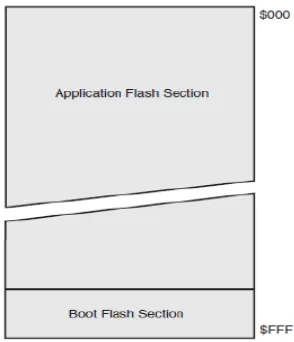
3. Daya Tahan Tinggi dan Segmen Memori non-volatile.
Mikrokontroler AVR memiliki daya tahan data (retensi data) 20 tahun ketika
suhu mencapai 85°C atau 100 tahun ketika suhu mencapai 25°C. ATmega8 memiliki
(seperti file .hex) sehingga cukup untuk diterapkan dalam penelitian skala kecil -
menengah.
Di samping memori Flash, ATmega8 juga memiliki 512 Byte EEPROM yang
dapat menampung data meskipun dalam keadaan OFF. Mikrokontroler ini juga
memiliki 1K Byte Internal SRAM sehingga proses data bisa lebih cepat.
Gambar 2.4 Flash ATmega8
Kelebihan lainnya dari ATmega8 adalah :
a. Dapat diisi data (write) dan dihapus (eraser) sampai 10.000 kali (untuk Flash)
dan 100.000 kali untuk EEPROM
b. Memiliki daya tahan data (retensi data) 20 tahun ketika suhu mencapai 85°C
atau 100 tahun ketika suhu mencapai 25°C
c. Terdapat pilihan Kode Boot Section dengan Lock Bits independen
d. Sistem keamanan data dengan mengunci program untuk Software Security
2.2 Sensor Ultrasonik
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan
gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di
hingga 400 KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan
unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah
kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan
dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas
tegangan yang diberikan dan ini disebut dengan efek piezoelectric.
Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi
gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya). Pantulan
gelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan gelombang
ultrasonik akan diterima kembali oleh unit sensor penerima. Selanjutnya unit sensor
penerima akan menyebabkan diafragma penggetar akan bergetar dan efek
piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang
sama.
Untuk lebih jelas tentang prinsip kerja dari sensor ultrasonik dapat dilihat
prinsip dari sensor ultrasonik pada gambar 2.4 berikut.
Gambar 2.5 Sensor Ultrasonik
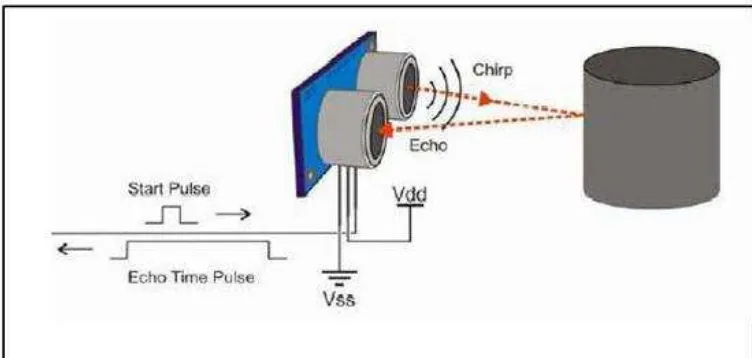
Besar amplitudo sinyal elektrik yang dihasilkan unit sensor penerima
pemancar dan sensor penerima. Proses sensoring yang dilakukan pada sensor ini
menggunakan metode pantulan untuk menghitung jarak antara sensor dengan objek
sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah
waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian
pengirim sampai diterima oleh rangkaian penerima, dengan kecepatan rambat dari
sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara. Prinsip
pantulan dari sensor ulrasonik ini dapat dilihat pada gambar 2.5 berikut ini.
Gambar 2.6 Prinsip Pemantulan Ultrasonik
2.2.1 Sensor Ultrasonik HC-SR04
HC-SR04 merupakan sensor ultrasonik yang dapat digunakan untuk
mengukur jarak antara penghalang dan sensor. Sensor ini mampu mendeteksi jarak
tanpasentuhan langsung dengan akurasi yang tinggi dan pembacaan yang stabil.
Sensor ini beroperasi tidak terpengaruh cahaya matahari atau alat pendeteksi jarak
lainnya. Sensor ini sudah tersedia modul transmitter dan receiver gelombang
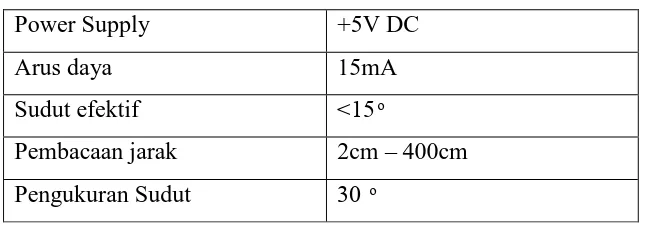
ultrasonic. Berikut ini spesifikasi dari sensor HC-SR04
Tabel 2.4 Spesifikasi sensor HC-SR04
Power Supply +5V DC
Arus daya 15mA
Sudut efektif 15
Pembacaan jarak 2cm – 400cm
Pengukuran Sudut 30
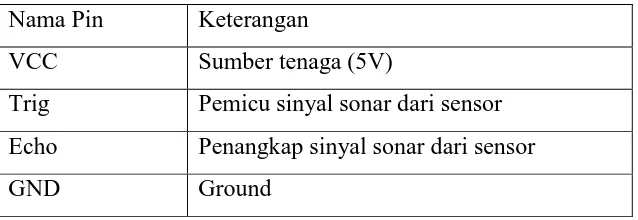
Nama Pin Keterangan
VCC Sumber tenaga (5V)
Trig Pemicu sinyal sonar dari sensor
Echo Penangkap sinyal sonar dari sensor
GND Ground
Konfigurasi pin dan tampilan sensor HC-SR04 diperlihatkan pada gambar di
bawah ini
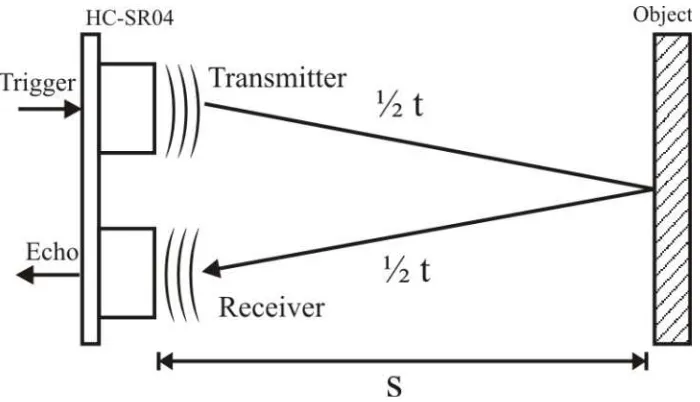
Gambar 2.7 Konfigurasi pin dan tampilan sensor ultrasonik HC-SR04 HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu ultrasonic
transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter adalah
memancarkan gelombang ultrasonik dengan frekuensi 40 KHz kemudian ultrasonic
receiver menangkap hasil pantulan gelombang ultrasonik yang mengenai suatu objek.
Waktu tempuh gelombang ultrasonik dari pemancar hingga sampai ke penerima
sebanding dengan 2 kali jarak antara sensor dan bidang pantul seperti yang
Gambar 2.8 Prinsip kerja HC-SR04
Prinsip pengukuran jarak menggunakan sensor ultrasonik HC-SR04 adalah, ketika
pulsa trigger diberikan pada sensor, transmitter akan mulai memancarkan gelombang
ultrasonik, pada saat yang sama sensor akan menghasilkan output TTL transisi naik
menandakan sensor mulai menghitung waktu pengukuran, setelah receiver menerima
pantulan yang dihasilkan oleh suatu objek maka pengukuran waktu akan dihentikan
dengan menghasilkan output TTL transisi turun. Jika waktu pengukuran adalah t dan
kecepatan suara adalah 340 m/s, maka jarak antara sensor dengan objek dapat
dihitung dengan menggunakan Persamaan 2.1.
2.1
Dimana :
s = Jarak antara sensor dengan objek (m)
t = Waktu tempuh gelombang ultrasonik dari transmitter ke receiver (s)
Pemilihan HC-SR04 sebagai sensor jarak yang akan digunakan pada
penelitian ini karena memiliki fitur sebagai berikut; kinerja yang stabil, pengukuran
jarak yang akurat dengan ketelitian 0,3 cm, pengukuran maksimum dapat mencapai 4
meter dengan jarak minimum 2 cm, ukuran yang ringkas dan dapat beroperasi pada
Prinsip pengoperasian sensor ultrasonik HC-SR04 adalah sebagai berikut ;
awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan, kemudian
berikan pulsa High (1) pada trigger selama 10 μs sehingga modul mulai
memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga transisi
naik terjadi pada output dan mulai perhitungan waktu hingga transisi turun terjadi,
setelah itu gunakan persamaan 2.1 untuk mengukur jarak antara sensor dengan objek.
Timing diagram diperlihatkan pada gambar berikut.
Gambar 2.9 Timing diagram pengoperasian sensor ultrasonik HC-SR04
2.3 RS232 to RS485 Converter 2.3.1 Komunikasi Serial RS232
Perangkat yang menggunakan kabel serial untuk komunikasi di bagi menjadi
dua kategori. Yaitu DCE (Data Communications Equipment) dan DTE (Data
Terminal Equipment). Peralatan komunikasi adalah perangkat seperti modem,
adaptor, dll.
Komunikasi serial merupakan hal yang penting dalam system embedded, karena
dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler
dengan devais lainnya. Port serial pada mikrokontroler terdiri atas dua pin yaitu RXD
standard tegangan yang berbeda dengan serial port mikrokontroler, sehingga agar
sesuai dengan RS-232 maka dibutuhkan suatu rangkaian level converter, IC yang
digunakan bermacam-macam, tapi yang paling mudah dan sering digunakan ialah IC
MAX232/HIN232. Pada mikrokontroler AVR ATmega 16, pin PD0 dan PD1
digunakan untuk komunikasi serial USART (Universal Syncronous and Asyncronous
Seial Receiver and Transmitter) yang mendukung komunikasi full duplex komunikasi
2 arah.
Pada prinsipnya, komunikasi serial ialah komunikasi dimana pengiriman data
dilakukan per bit, sehingga lebih lambat dibandingkan komunikasi parallel seperti
pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa
contoh komunikasi serial ialah mouse, scanner, dan system akuisisi data yang
terhubung ke port COM1/COM2.
Devais pada komunikasi serial port dibagi menjadi 2 kelompok yaitu Data
Communication Equipment (DCE). Contoh dari DCE ialah, Modem, plotter, scanner,
dll. Sedangkan contoh dari DTE ialah terminal di komputer. Spesifikasi elektronik
dari serial port merujuk pada Electronic Industry Association (EIA):
Space‖ (logika 0) ialah tegangan antara +3 hingga +25V.
‖Mark‖ (logika 1) ialah tegangan antara -3 hingga -25V.
Daerah antara +3V hingga -3V tidak didefenisikan /tidak terpakai Tegangan open circuit tidak boleh melebihi 25V.
Arus hubungan singkat tidak boleh melebihi 500A.
Port serial sering digunakan untuk interfacing komputer dan mikrokontroler,
karena kemampuan jarak pengiriman data dibandingkan port paralel. Berikut contoh
program assembly untuk komunikasi serial antara 2 PC. Untuk komunikasi ini, anda
cukup menghubungkan :
Pin TxD ke pin RxD komputer lain
Pin RxD dihubungkan ke pin TxD komputer lain RTS dan CTS dihubungkan singkat
GND dihubungkan ke GND komputer lain
2.3.2 Komunikasi Serial RS485
RS485 adalah teknik komunikasi data serial yang dikembangkan tahun 1983
dimana dengan teknik ini komunikasi data dilakukan pada jarak yang cukup jauh
yaitu 1,2 km. berbeda dengan komunikasi RS232 yang mampu berhubungan secara
one to one, maka komunikasi RS485 selain dapat digunakan komunikasi multidrop
yaitu berhubungan secara one to many dengan jarak yang jauh, teknik ini juga dapat
digunakan untuk menghubungkan 32 unit beban sekaligus hanya dengan
menggunakan dua buah kabel saja tanpa memerlukan referensi ground yang sama
antara unit yang satu dengan unit yang lainnya.
Bus RS485 adalah mode transmisi balanced differential. Bus ini hanya
mempunyai dua sinyal, A dan B dengan perbedaan tegangan antara keduanya. Karena
line A sebagai referensi terhadap B maka sinyal akan high bila mendapat input low,
demikian pula sebaliknya. Pada komunikasi RS485 semua peralatan elektronik
berada pada posisi penerima hingga salah satu memerlukan untuk mengirimkan data,
maka peralatan tersebut akan berpindah ke mode pengirim, mengirimkan data dan
kembali ke mode peneima. Setiap kali peralatan elektronik tersebut hendak
mengirimkan data, maka terlebih dahulu harus diperiksa, apakah jalur yang akan
digunakan sebagai media pengiriman data tersebut tidak sibuk. Apabila jalur masih
sibuk, maka peralatan tersebut harus menunggu hingga jalur sepi. Agar data yang
dikirimkan hanya sampai kepada peralatan elektronik yang dituju, misalkan ke salah
satu Slave, maka terlebih dahulu pengiriman tersebut diawali dengan Slave ID dan
dilanjutkan dengan data yang dikirimkan. Peralatan elektronik yang lain akan
menerima data tersebut, namun data yang diterima tidak mempunyai ID yang sama
dengan Slave ID yang dikirimkan, maka peralatan tersebut harus menolak atau
mengabaikan data tersebut. Namun bila Slave ID yang dikirimkan sesuai dengan ID
dari peralatan elektronik yang menerima, maka data selanjutnya kan diambil untuk
2.3.3 Kecepatan Transfer Data RS485
Gambar 2.10 Grafik kecepatan transfer data vs panjang kabel data 2.3.4 Topologi Jaringan RS485
Gabar 2.11 Topologi jaringan RS485
2.3.5 Rangkaian Half-Duplex pada RS485
Half duflex artinya pada satu saat hanya ada 1 node yang mengirim data secara
Gambar 2.12 Rangkaian RS485 dengan ic max485 2.3.6 Penjelasan kaki ic max485
kaki 1 digunakan untuk menerima data , kaki ini dihubungkan dengan pin Rx dari comm port /rs232 dari Pc atau Rx dari microcontroller.
kaki 2 (RE) digunakan untuk kontrol penerimaan data jika diberi 0 maka siap menerima data jika 1 maka tidak bisa menerima data.
kaki 3 (DE) digunakan untuk kontrol pengiriman data jika pc atau mikrokontroler ingin mengirim data maka kaki ini harus diberi logika 1.
kaki 4 digunakan untuk jalur pengiriman data , kaki ini dihubungkan ke Tx dari pin comm port rs232 atau Tx mikrokontroler.
kaki 5 di hubungkan ke ground.
kaki 6 dihubungkan dengan kaki 6 dari ic max485 node lainnya melalui kable data, biasanya dinamakan jalur A
kaki 7 dihubungkan dengan kaki 7 dari ic max485 node lainya melalui kabel data, biasanya dinamakan jalur B.
kaki 2 pada master biasanya dihubungkan ke 0 / ground . Artinya master selalu siap menerima data.
Secara pemrograman Rs485 persis sama dengan rs232 , hanya perlu ditambah
perintah untuk membuat kaki 3 (DE) dari ic max485 diset menjadi 1 ketika akan
mengirim data .
Jika kita ingin mengirim data dari komputer lewat program visual basic 6 bisa
dengan baris perintah :
MSComm1.RTSEnable = False
dan sebaliknya ketika penerimaan data kaki 2 (RE) dari ic max485 diset ke
0. dengan baris perintah :
MSComm1.RTSEnable = True
sebelumnya jangan lupa hubungkan pin RTS pada serial port PC kita dengan Pin
3 (DE ) dari ic max485 seperti tampak pada contoh jaringan Rs485 gambar dibawah
ini:
Penjelasan Rangkaian diatas:
a. Master pada rangkaian diatas adalah sebuah PC dan sebagai slavenya adalah
2 buah microcontroller.
b. IC Max232 digunakan merubah tegangan dari 12v port serial PC ke TTL (5
volt) . karena tegangan yang keluar dari Comm port PC kita 12v , sedangkan
max485 menggunakan tegangan TTL (5v). Ada cara yang lebih praktis yaitu
dengan menggunakan modul Rs232 to rs485.
c. Kaki RE ic max485 dihubungkan ground artinya PC sebagai master selalu
siap (defaultnya) menerima data
d. Pada ujung kabel data jangan lupa diberi tahanan 120 ohm supaya sinyal
tidak mantul.
e. Pada slave misalnya sebuah Microcontroller dgn Icmax485 , gabungkan kaki
RE dan DE dari max485 lalu hubungkan ke pin tertentu misal portD.7
maka ketika Mikrokontroler akan mengirim data , portD.7 harus dibuat 1
terlebih dahulu sebelum microcontroller mengirim data .
PortD.7 = 1; // DE dan RE dibuat 1 putchar(„a‟); // kirim data „a‟
PortD.7=0; // DE dan Re = 0 ( kembalikan ke default siap terima data)
2.3.8 Kelebihan dan kekurangan komunikasi RS485
Berikut ini beberapa kelebihan dan kekurangan menggunakan komunikasi
serial RS485.
Tabel 2.6 Kelebihan dan kekurangan komunikasi dengan RS485
Kelebihan Kekurangan
1. Antarmuka yang popular, sehingga
banyak piranti yang telah mendukung
hingga 1000 feet
3. Tahan terhadap noise dan perbedaan
tegangan
4. Diimplementasikan pada hardware dan
software
Rangkaian Buzzeratau yang biasa disebut sebagai rangkaian alarm pengingat pesan
dan tanda pastinya sudah sering ditemukan di beberapa perangkat elektronik di pasar.
Pada era teknologi modern ini, pastinya alarm sudah tersedia di beberapa perangkat
elektronik seperti ponsel dan juga jam memiliki alarm sebagai tanda peringatan.
Rangkaian alarm atau tanda pengingat ini sudah menjadi salah satu penunjang
penting dan tidak dapat dipisahkan di beberapa perangkat elektronik tersebut.
Gambar 2.14 Simbol dan Bentuk Fisik buzzer
Rangkaian tanda pengingat ini berfungsi untuk mendeteksi gerakan dan juga
cahaya yang bisa membantu Anda mencegah kasus pencurian. Pada skema rangkaian
buzzerini terdapat komponen penting yaitu Timer IC NE 555. Untuk komponen R4
LDR memiliki fungsi untuk mendeteksi atau melakukan penginderaan cahaya yang
ini adalah cara menerima cahaya yang masuk. Apabila cahaya terang, tingkat
resistensi dari LDR ini akan rendah dan tidak membuat rangkaian tersebut
mengalirkan arus ke arah buzzer atau speaker yang terdapat di dalam rangkaian
tersebut
Hal kebalikannya justru terjadi jika LDRmenerima cahaya rendah atau gelap
sama sekali. Hasilnya, tingkat resistansi menjadi lebih tinggi sehingga bisa
menimbulkan aliran ke arah komponen buzzer. Bersamaan dengan keadaan tingkat
resistansi yang tinggi, nantinya komponen IC akan terpicu dan mendorong buzzer
untuk menghasilkan suara yang nyaring dan mendeteksi adanya gangguan.
Rangkaian ini juga bisa menggunakan cahaya sebagai alat pengaktifannya jika relay