2
6
JREC
Journal of Electrical and Electronics Vol 1. No.2
Motor Stepper pada Mesin Labelling
Lidemar
1 `, Seta Samsiana
2, Sri Marini
2Program Studi Teknik Elektro
1Fakultas Teknik Universitas Hasanudin (UNHAS)
Program Studi Teknik Elektro
2Fakultas Teknik Universitas Islam “45” (UNISMA)
Jl. Cut Meutia No. 83 Bekasi, Indonesia
Telp. 021-88344436, 021-8802015 Ext. 124
ABSTRAK
Dalam mendapatkan tingkat keakuratan yang tinggi serta sudut putar yang tepat maka digunakanlah
motor stepper sebagai penggerak untuk mesin labeling. Mesin labeling adalah mesin industri yang
berfungsi memberi label pada kemasan produk yang diinginkan. enggunaan motor stepper memiliki
beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara lain
sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur., motor dapat
langsung memberikan torsi penuh pada saat mulai bergerak, posisi dan pergerakan repetisinya dapat
ditentukan secara presisi, memiliki respon yang sangat baik terhadap mulai, stop dan berba lik
(perputaran),sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada
motor DC,dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke
porosnya, frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
2
7
JREC
Journal of Electrical and Electronics Vol 1. No.2
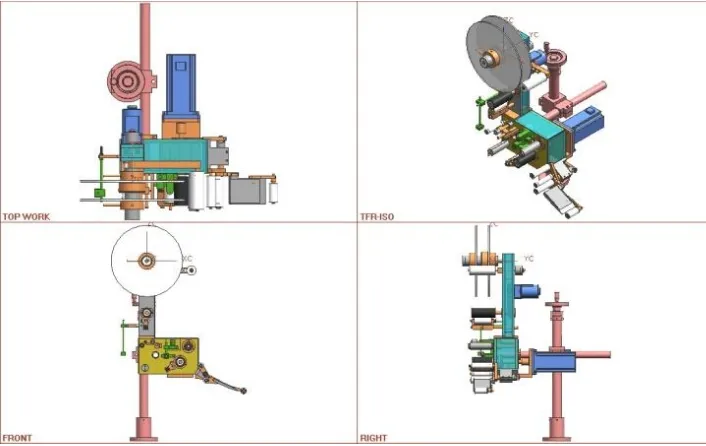
I. Mesin Labelling
Mesin labeling adalah mesin industri yang berfungsi memberi label pada kemasan produk yang diinginkan. Mesin ini merupakan penunjang mesin – mesin utama produksi.
Gambar 1.1 Mesin Labelling
Prinsip Kerja
Apabila sensor pembaca kemasan telah medapati sinyal karena posisi kemasan maka sensor ini akan memberikan input kepada motor stepper untuk berputar menarik label sesuai dengan program yang diberikan, untuk memberhentikan putaran motor digunakan sensor photoelektrik yang membaca posisi label sehingga sesuai dengan yang diinginkan. Proses kerja ini akan terus berulang selama mesin dihidupkan .
Komponen Utama
Untuk merancang mesin labelling ini dibutuhkan banyak part – part elektrik, namun komponen utamanya terdiri dari 3 komponen yaitu:
1. Motor Stepper. 2. Sensor Photo Elektrik
3. PLC ( Programmable Logic Controller ).
II. Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara lain adalah :
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi.
Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran).
Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC.
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya.
Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
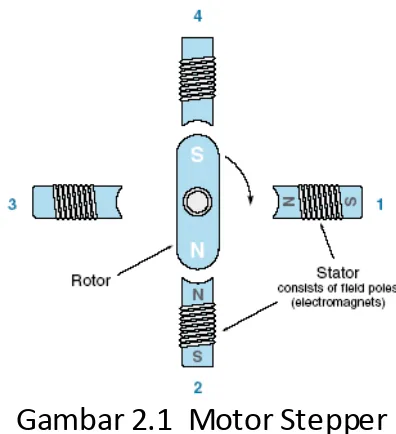
Motor stepper adalah motor DC yang khusus berputar dalam suatu derajat yang tetap yang disebut step (langkah). Satu step antara 0,9 sampai 90°. Motor stepper terdiri dari rotor dan stator. Rotor adalah permanen maget sedangkan stator adalah elektromagnet. Rotor akan bergerak jika stator diberi aliran listrik. Aliran listrik ini membangkitkan medan magnet dan membuat rotor menyesuaikan dengan kutub magnet yang dimilikinya.
Motor stepper digunakan khusus menentukan posisi batang motor tanpa harus
2
8
JREC
Journal of Electrical and Electronics Vol 1. No.2
mempergunakan sensor posisi. Hal ini dapat dilakukan dengan cara menghitung jumlah step yang harus diberikan dari posisi acuan. Ukuran dari
step ditentukan oleh jumlah rotor dan kutub stator. Tidak ada kesalahan kumulatif yaitu kesalahan sudut tidak terus bertambahan dengan meningkatnya step.
Gambar 2.1 Motor Stepper
Pada dasaranya terdapat 3 tipe motor stepper yaitu:
1. Motor stepper tipe Variable reluctance (VR)
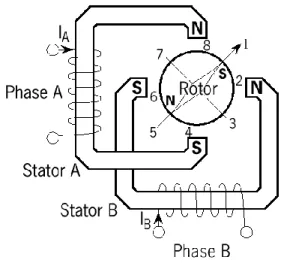
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator. Berikut ini adalah penampang melintang dari motor stepper tipe variable reluctance (VR):
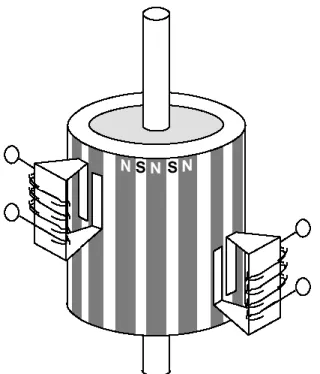
Gambar 2.2 Penampang Melintang dari Motor Stepper Tipe Variable Reluctance (VR) 2. Motor stepper tipe Permanent
Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan (perhatikan gambar 4.3). Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper tipe permanent magnet:
2
9
JREC
Journal of Electrical and Electronics Vol 1. No.2
Gambar 2.3 Ilustrasi Sederhana dari Motor Stepper Tipe Permanent Magnet (PM) 3. Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunakan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang dari motor stepper tipe hibrid:
Gambar 2.4 Penampang Melintang dari Motor Stepper Tipe Hybrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan (perhatikan gambar 2.5).
3
0
JREC
Journal of Electrical and Electronics Vol 1. No.2
Gambar 2.5 Motor Stepper dengan Lilitan Unipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya (perhatikan gambar 4.7). Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2.6. Motor Stepper dengan Lilitan Bipolar
Motor Stepper & Driver
Pada mesin labeling ini motor yang digunakan adalah motor stepper Type Hybrid 5-Phase,0.72°/Step,DC 4.37V,1.4A. Sebuah motor stepper digunakan untuk mencapai posisi yang tepat melalui kontrol digital. Motor bekerja dengan akurat sinkronisasi dengan output sinyal pulsa dari controller untuk pengemudi. Stepper motor, dengan kemampuan mereka untuk menghasilkan torsi tinggi pada kecepatan rendah dan meminimalkan getaran, sangat ideal untuk
aplikasi yang membutuhkan posisi cepat
melalui jarak pendek.
Stepper motor mengaktifkan posisi akurat dengan mudah. Mereka digunakan dalam berbagai jenis peralatan untuk sudut rotasi akurat dan kontrol kecepatan menggunakan sinyal pulsa. Stepper motor menghasilkan torsi tinggi dengan tubuh yang kompak, dan ideal untuk akselerasi cepat dan respon. Berikut merupakan beberapa fitur dan kelebihan motor stepper 5-Phase,0.72°/Step,DC 4.37V,1.4A
Positioning Akurat di Langkah Halus Motor stepper berputar dengan sudut langkah tetap, seperti perputaran jam. Sudut ini disebut "sudut langkah dasar". Oriental Motor menawarkan motor stepper dengan sudut langkah dasar 0,36 °, 0,72 °, 0,9 ° dan 1,8 °.
Gambar 2.7 Sudut Langkah Dasar
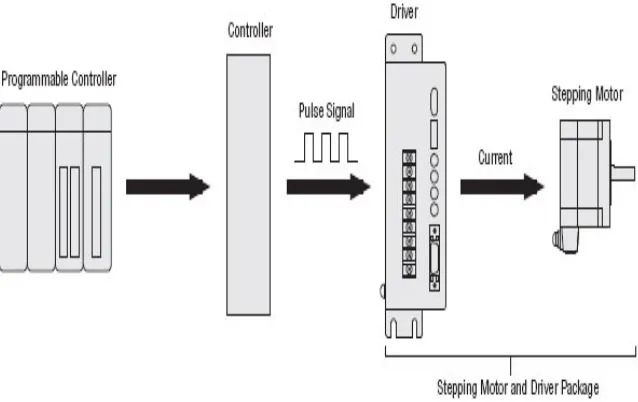
Mudah Control dengan Sinyal Pulse Sebuah konfigurasi sistem untuk penentuan posisi akurasi tinggi ditunjukkan di bawah ini. Sudut rotasi dan kecepatan dari motor stepper dapat dikontrol dengan akurasi yang tepat dengan menggunakan sinyal pulsa dari controller.
3
1
JREC
Journal of Electrical and Electronics Vol 1. No.2
Gambar 2.8 Konfigurasi System Motor Stepper.
Sinyal pulsa
Sebuah sinyal pulsa atau sinyal listrik yang tegangan perubahan berulang kali antara ON dan OFF . Setiap ON / OFF siklus dihitung sebagai satu pulsa. Perintah dengan satu pulsa menyebabkan poros output motor untuk berbelok dengan satu langkah. Tingkat sinyal yang sesuai dengan tegangan ON dan OFF kondisi yang disebut sebagai "H" dan "L" pada masing-masing level.
Gambar 2.9 Siklus Sinyal Pulsa
Besarnya Rotasi adalah Sebanding dengan Jumlah Pulsa.
Jumlah Rotasi motor stepper berputar sebanding dengan jumlah sinyal pulsa (jumlah pulsa) yang diberikan kepada driver. Hubungan rotasi stepper motor (sudut rotasi dari poros motor keluaran) dan nomor pulsa dinyatakan sebagai berikut:
Gambar 2.10. Hubungan antara Pulsa dengan Sudut Rotasi.
Kecepatan Motor Proporsional dengan Kecepatan Pulse.
Kecepatan dari motor stepper sebanding dengan kecepatan sinyal pulsa (frekuensi denyut) yang diberikan kepada driver. Hubungan kecepatan pulsa [Hz] dan kecepatan motor [r / min] dinyatakan sebagai berikut:
Gambar 2.11 Hubungan antara Kecepatan Motor dengan Frekuensi
Membangkitkan Torsi Tinggi dengan Tubuh Compact.
Stepper motor menghasilkan torsi tinggi dengan tubuh yang kompak. Fitur-fitur ini memberikan akselerasi yang sangat baik dan respon yang baik, yang pada gilirannya membuat motor ini cocok untuk torsi-menuntut aplikasi mana motor harus mulai
3
2
JREC
Journal of Electrical and Electronics Vol 1. No.2
dan sering berhenti. Untuk memenuhi kebutuhan torsi lebih besar pada kecepatan rendah, Oriental Motor juga telah diarahkan motor menggabungkan desain yang kompak dan torsi yang tinggi.
Loop Tertutup Stepper Motor dan Driver Package – Alpha Step
AlphaStep terdiri dari produk paket yang dirancang untuk menarik keluar fitur maksimal dari motor stepper. Paket-paket ini biasanya beroperasi serentak dengan perintah pulsa, tapi ketika akselerasi tiba-tiba atau perubahan beban terjadi, mode kontrol unik memelihara operasi positioning. Model AlphaStep juga dapat output posisi penyelesaian dan sinyal alarm, yang meningkatkan kehandalan dari peralatan yang dioperasikan.
Gambar 2.12. Stepper Motor dengan Sistem Konfigurasi Loop Tertutup
Pulsa Paket Masukan
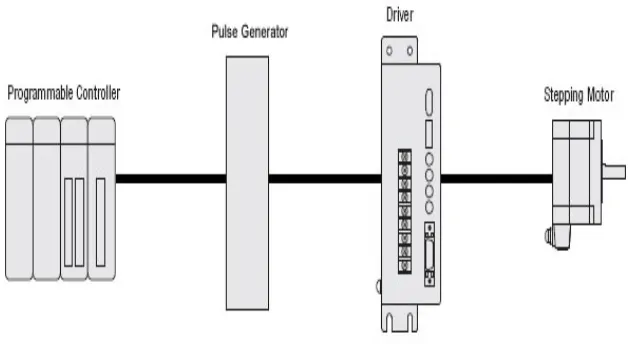
Motor dapat dikendalikan dengan menggunakan generator pulsa yang diberikan oleh pengguna. Data operasi adalah input ke generator pulsa sebelumnya. Pengguna kemudian memilih data operasi pada host pengontrol yang dapat diprogram, maka masukan perintah operasi.
Gambar 2.13. Konfigurasi Sistem Penggerak
Built –in Pengendali
Built-in fungsi generasi pulsa memungkinkan motor harus dikontrol melalui komputer yang terhubung secara langsung atau pengontrol yang dapat diprogram. Karena tidak ada generator pulsa terpisah yang diperlukan, driver jenis ini menghemat ruang dan menyederhanakan kabel.
Gambar 2.14 Pengendali Motor Stepper ( tanpa pulsa generator )
III. Sensor Photo Elektrik.
Sensor ini menggunakan elemen peka cahaya untuk mendeteksi benda-benda dan terdiri dari transmitter/emitor (sumber cahaya) dan penerima (receiver). Terdapat 4 jenis sensor fotolistrik yang tersedia :
1. Pemantulan Langsung (Direct Reflection)
3
3
JREC
Journal of Electrical and Electronics Vol 1. No.2
Transmitter dan receiver ditempatkan bersama-sama dan menggunakan cahaya yang dipantulkan langsung dari objek untuk melakukan deteksi. Pemilihan photosensor jenis ini harus mempertimbangkan warna dan tipe permukaan objek (kasar, licin, buram, terang). Dengan permukaan buram, jarak sensing akan dipengaruhi oleh warna objek. Warna-warna terang berpengarh terhadap jarak sensing maksimum dan warna gela berpengaruh terhadap jarak sensing minimum. Jika permukaan obyek mengkilap, efek permukaan yang lebih penting daripada warna. Pada data tehnik (katalog), jarak sensing yang tertera merupakan uji dengan menggunakan i kertas putih (matte).
2. Refleksi dengan reflektor (Reflection with Reflector)
Transmitter dan receiver ditempatkan bersama-sama dan membutuhkan reflektor. Obyek terdeteksi karenan memotong cahaya antara sensor dan reflektor sehingga receiver tidak menerima cahaya. Photocells ini memungkinkan jarak sensing lebih jauh. Dengan adanya reflector sinar yang dipancarkan akan dipantulkan sepenuhnya ke receiver.
3. Pemantulan terpolarisasi dengan reflektor (Polarized Reflection with Reflector)
Mirip dengan Pemantukan dengan reflektor, photocells ini menggunakan perangkat anti-refleks. Jadi reflector tidak mengkilap. Sensor ini mendasarkan fungsi pada sebuah pita cahaya terpolarisasi, memberikan keuntungan dan deteksi akurat bahkan ketika permukaan obyek sangat mengkilap. Data teknik tidak ada karena sangat dipengaruhi oleh pemantulan acak (benda apa saja).
4. ThroughBeam
Transmitter dan Receiver ditempatkan secara terpisah dan deteksi obyek terjadi ketika memotong sinar antara transmitter dan receiver sehingga receiver
kehilangan cahaya sesaat. Photocells ini memiliki jarak sensing terpanjang.
Gambar 3.1 Jenis Sensor Photo Elektrik
Tipe output : Light ON / Dark ON:
a. Light ON : Receiver menerima sinar maka output/keluaran ON, ketika sinar terpotong oleh object maka output/keluaran OFF
b. Dark ON : Receiver menerima sinar maka output/keluaran OFF, ketika sinar terpotong oleh object maka output/keluaran ON
Pada tipe Direct Reflection, output NO adalah untuk Light On dan output NC adalah untuk Dark On. Untuk tipe sensor yang lain, output NO adalah Dark On dan output NC adalah Light On.
Sensing Distance (Sn):
Ruang/jarak di mana keberadaan objek dapat dirasakan. Untuk tipe Direct Reflection itu adalah jarak maksimum antara fotosel dan objek. Untuk tipe reflection itu adalah jarak antara unit dan reflektor.
Power On Delay:
Ini adalah selang waktu yanng dibutuhkan antara tersedianya daya dan
3
4
JREC
Journal of Electrical and Electronics Vol 1. No.2
operasi pada output. Hal ini untuk
menghindari switching (pensaklaran kejut) yang tidak diinginkan saat sensor
diberisupply.
Output:
Outputnya open colector PNP dan NPN
IV. PLC ( Programmable Logic Controller )
PLC ( Programmable Logic Controller ) yaitu kendali logika terprogram merupakan suatu piranti elektronik yang dirancang untuk dapat beroperasi secara digital dengan menggunakan memori sebagai media penyimpanan intruksi – intruksi internal untuk menjalankan fungi – fungsi logika, seperti fungsi pencacah, fungsi urutan proses, fungsi pewaktu, fungsi aritmatika, dan fungsi yang lainnya dengan cara memprogramnya. Program – program dibuat kemudian dimasukkan dalam PLC melalui programmer/monitor. Pembuatan program dapat menggunakan computer sehingga dapat mempercepat hasil pekerjaan. Fungsi lain pada PLC dapat digunakan untuk memonitor jalannya proses pengendalian yang sedang berlangsung, sehingga dapat dengan mudah dikenali urutan kerja (work squence) proses pengendalian yang terjadi pada saat itu.
Pada mesin labeling ini PLC yang digunakan adalah PLC FP Sigma dari Panasonic dengan type FPG - C32T2H – A dengan spesifikasi AFPG2643H - A
FP∑ - C32 Control Unit.
Gambar 4.1 Unit Kontrol FP Sigma
FP-Sigma
FP-Sigma fitur teknologi kontrol yang sangat terbaru dan desain struktur kompak. Hal ini dapat berkomunikasi dengan semua produk otomatisasi pabrik utama. Tentu saja Anda dapat program FP-Sigma menggunakan perangkat lunak kami FPWIN Pro (sesuai dengan IEC 61131-3), dan ini kompatibel dengan semua kontrolerPanasonic. Beberapa kelebihan yang dimiliki antara lain :
Program memori yang besar ( 32 k perintah )
Data memori yang besar ( 32 k kata ).
Efisiensi fungsi control gerak.
50 kHz counter input cepat.
100kHz output pulsa.
Perintah posisi nyaman.
Waktu pemprosesan cepat 0.32µs/basic command
Real-time clock
Desain kompak (W 30 x H 90 x D 60mm)
Kinerja komunikasi tinggi untuk 3 serial interface mungkin pada CPU.
MODBUS RTU Master / Slave standar di semua CPU
3
5
JREC
Journal of Electrical and Electronics Vol 1. No.2
Kaset komunikasi
FPG-COM2 Penggunaan kaset komunikasi menyediakan hingga 3 port komunikasi serial dalam satu unit FP-Sigma (RS232 atau RS485). Tidak ada ruang tambahan diperlukan untuk ekspansi kaset: Anda hanya plug mereka ke CPU.
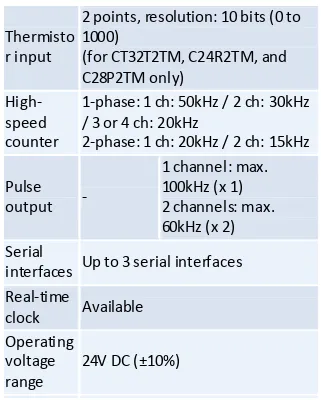
Berikut merupakan data spesifikasi dari PLC FP Sigma : PLC type FPG-C24R2H-A FPGC24R2 HTM FPG-C28P2H-A FPGC28P2 HTM FPG-C32T2H-A FPGC32T2 HTM Number of inputs 16 16 16 Number of outputs 8 relay 12 transistor PNP 16 transistor NPN Output capacity 2A 4x0.5A and 8x0.3A 4x0.3A and 12x0.1A Digital I/Os (max.) 376 (192 / 184) 380 (192 / 188) 384 (192 / 192) Analogue I/Os (max.) 40 inputs / 28 outputs Processing
speed 0.32µs/step (basic instruction)
Memory Memory type Flash-ROM Programm e capacity 32000 steps Data register 32765 words (expandable to 1024k words) Special functions Potentiom eter (Volume) input
2 points, resolution: 10 bits (0 to 1000)
(for CT32T2, C24R2, and C28P2 only)
Thermisto r input
2 points, resolution: 10 bits (0 to 1000) (for CT32T2TM, C24R2TM, and C28P2TM only) High-speed counter 1-phase: 1 ch: 50kHz / 2 ch: 30kHz / 3 or 4 ch: 20kHz 2-phase: 1 ch: 20kHz / 2 ch: 15kHz Pulse output - 1 channel: max. 100kHz (x 1) 2 channels: max. 60kHz (x 2) Serial
interfaces Up to 3 serial interfaces Real-time clock Available Operating voltage range 24V DC (±10%)
Tabel 4.2 Spesifikasi PLC FP Sigma Panasonic. Berikut adalah diagram tangga program mesin Labelling :
3
6
JREC
Journal of Electrical and Electronics Vol 1. No.2
Bahasa pemrograman yang digunakan oleh PLC ini berupa diagram tangga dan kode mnemonic. Perangkat lunak yang digunakan dalam pemrograman PLC, yaitu FPWIN GR V 2.00. FPWIN GR merupakan perangkat lunak yang hanya dapat digunakan untuk pemrograman PLC NAiS.
3
7
JREC
Journal of Electrical and Electronics Vol 1. No.2
United Nations Environment Programme.2006.Pedoman Efisiensi Energi untuk Industri di Asia.India.UNEP
Himaone.Dasar Motor Stepper.[
http://www.himaone.net/] (10 Juni 2013)
2011.Photo Electric Sensor.
[http://au2mation.blogspot.com/2011/09/ph
otoelectric-sensor.html] (15 Juni 2013)
Stepper Motors & Driver.
[http://www.orientalmotor.com/products/ste pper-motors/index.html] (13 Juni 2013)
Powerful Compact PLC FP- Sigma.
[http://www.panasonic-electric-works.com/peweu/en/html/fpsigma.php] (13 Juni 2013)
Husanto, dan Thomas. 2007. PLC (Programmable Logic Control) FP Sigma. Yogyakarta : ANDI