MODEL KAPAL
TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Teknik Universitas Sanata Dharma
Disusun Oleh :
SUVENDI HALIM
NIM : 035114026
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
A SHIP MODEL
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
to Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
of Sanata Dharma University
By :
SUVENDI HALIM
Student Number : 035114026
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
KENDALI JARAK JAUH PADA MODEL KAPAL
Disusun Oleh :
SUVENDI TIALIM
NIM: 035114026
telah disetujui oleh :
Pembimbins I
r Tanggal ) l S e p t t w r b e r 2 O O 7
Motto Hidup
Ketika satu pintu tertutup, pintu lain terbuka; namun terkadang kita melihat dan menyesali pintu tertutup tersebut terlalu lama hingga kita tidak melihat pintu lain yang telah terbuka.
Alexander Graham Bell
Jenius adalah 1% inspirasi dan 99% keringat. Tidak ada yang dapat menggantikan kerja keras.
Keberuntungan adalah sesuatu yang terjadi ketika kesempatan bertemu dengan kesiapan.
Thomas A. Edison
Jika Anda dapat memimpikannya, Anda dapat melakukannya. Ingatlah, semua ini diawali dengan seekor tikus,
Tanpa inspirasi ... .kita akan binasa.
Walt Disney
Kupersembahkan Kepada papa (alm) dan mama tercinta Abangku : Atong, Ahong, Jack Daniel
Memainkan model kapal di air adalah hal yang menyenangkan. Untuk mengendalikan model kapal tidak cocok menggunakan kabel tetapi lebih baik mengendalikannya dengan tanpa menggunakan kabel (nirkabel). Oleh karena itulah, penulis ingin membuat Kendali Jarak Jauh Pada Model Kapal dengan arah kendali: maju, mundur, belok kanan, belok kiri dan stop.
Tugas akhir ini membahas Kendali Jarak Jauh Pada Model Kapal dengan menggunakan basis mikrokontroler AT89S51. Untuk mengirimkan dan menerima perintah menggunakan modul transceiver 2,4 GHz. Modul ini dapat menjangkau sampai jarak 100 meter. Model kapal ini menggunakan 2 motor DC sebagai penggerak.
Alat ini terdiri dari 2 buah modul: modul master dan modul slave. Pada modul
master berfungsi sebagai pemberi perintah. Modul master ini terdiri dari 5 tombol yang berfungsi untuk perintah maju, perintah mundur, perintah belok kanan, perintah belok kiri dan perintah stop. Pada modul master juga dapat diatur pilihan kecepatan pada menu di LCD. Pilihan kecepatannya yaitu slow, medium dan fast. Pada modul
slave berfungsi untuk melaksanakan perintah untuk menjalankan 2 motor DC dan memberi indikasi 2 buah led.
Alat ini dapat dikendalikan dengan arah: maju (agak berbelok ke kanan depan), mundur (agak berbelok ke kanan belakang), belok kanan, belok kiri dan stop. Alat ini juga mempunyai 3 mode kecepatan: slow, medium dan fast. Arah gerakan maju dan mundur yang kurang akurat disebabkan rpm (Revolutions Per Minute) motor dan bentuk fisik baling-baling di sebelah kiri dan kanan yang tidak identik satu sama lain. Jangkauan kendali maksimal alat ini yaitu 125,9 meter.
Playing ship model on the water is fun. To control ship model is not suitable using cable but it is better to control it using wireless. Therefore, the writer wanted to make this Remote Control On A Ship Model which has the direction’s control: moving forward, moving back, turning right, turning left and stopping.
This paper discussed about Remote Control On A Ship Model based on AT89S51 microcontroller. To transmitting command and receiving command using transceiver 2,4 GHz module. This module can transmit over 100 meters distance. The ship’s model uses 2 DC motors as actuating device.
This project consists of two modules: master module and slave module. The master module is used for sending the commands. It has 5 buttons that are used for moving forward command, moving back command, turning right command, turning left command and stop command. In the master module, it can adjust the speed choices in the LCD menu. The speed choices are slow, medium and fast. The slave module is used to do the commands for spinning the DC motors and indicating two led.
This project can be controlled its ways for moving forward (quite turning right forward), moving back (quite turning right back), turning right, turning left and stopping. It also has 3 speed choices: slow, medium and fast. The moving forward and moving back direction, that are not accurate, are caused by the motor’s rpm (Revolutions Per Minute) and the shape of ship’s screw on the left and right which are not identical each other. The remote control of this project can transmit over 125.9 meters distance.
Puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa yang telah melimpahkan rahmat dan karunia-Nya, sehingga penulis dapat menyelesaikan tugas akhir berjudul “Kendali Jarak Jauh Pada Model Kapal ”.
Tugas akhir ini merupakan salah satu syarat untuk memperoleh gelar Sarjana Teknik pada Jurusan Teknik Elektro Universitas Sanata Dharma Yogyakarta. Penulisan tugas akhir ini didasarkan pada hasil-hasil yang penulis dapatkan selama proses perancangan, pembuatan, pengujian dan pengembangan alat.
Penulisan tugas akhir ini tidak lepas dari bantuan berbagai pihak. Oleh karena itu, penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Bapak Djoko Untoro Suwarno, S.Si., M.T. selaku pembimbing I yang telah meluangkan waktu, tenaga dan pikirannya untuk membimbing penulis.
2. Ibu Ir. Th. Prima Ari Setiyani, M.T. selaku pembimbing II yang dengan senang hati memberikan saran, ide, dukungan dan semangat.
3. Bapak Ir. Tjendro dan Bapak Petrus Setyo Prabowo, S.T. sebagai dosen penguji saat ujian kolokium yang telah memberikan tambahan ide dan revisi pada skripsi penulis.
4. Bapak Martanto, S.T., M.T. dan Wiwien Widyastuti, S.T., M.T. selaku dosen penguji saat ujian pendadaran yang telah memberikan tambahan ide dan revisi pada skripsi penulis.
5. Bapak dan Ibu dosen yang telah banyak memberikan pengetahuan dan bimbingan kepada penulis selama kuliah di Universitas Sanata Dharma.
6. Bapak Aris Sukardjito dan seluruh karyawan/wati Sekretariat Fakultas Teknik Universitas Sanata Dharma.
7. Ibunda penulis yang telah memberikan semangat dan doa yang tak pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
8. Kakakku Soeyanti, abang-abangku Atong, Ahong, Jack Daniel, dan keponakanku Vera Valentina yang telah memberikan semangat dan doa, juga semua keluarga yang telah memberikan semangat baik material maupun spiritual.
yang telah menemani penulis dalam suka maupun duka.
12.Laboran Teknik Elektro : mas Hardi, mas Suryono, mas Mardi, mas Broto dan mas Yusuf.
13.Teman-teman mahasiswa jurusan Teknik Elekro yang telah banyak membantu : Jeffry, Widyono, Suryo, Denis, Winarto, Cecep, Merry, Yo, Inggit, DC, Prater
dan semua pihak yang tidak dapat penulis sebutkan satu per satu.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari penulisan tugas akhir ini. Oleh karena itu, segala kritik dan saran yang bersifat membangun sangat penulis harapkan.
Akhir kata penulis berharap agar skripsi ini dapat bermanfaat bagi penulis maupun pembaca semuanya.
Yogyakarta, 5 November 2007
Penulis
Halaman Judul ... i
Halaman Judul dalam Bahasa Inggris... ii
Lembar Pengesahan oleh Pembimbing... iii
Lembar Pengesahan oleh Penguji ... iv
Lembar Pernyataan Keaslian Karya... v
Halaman Persembahan dan Motto Hidup ... vi
Intisari ... vii
Abstract... viii
Kata Pengantar... ix
Daftar Isi……….. xi
Daftar Gambar………. xiv
Daftar Tabel ……… xvi
Daftar Lampiran………... xviii
BAB I PENDAHULUAN………... 1
1.1 Latar Belakang Masalah………... 1
1.2 Tujuan dan Manfaat………... 2
1.3 Batasan Masalah………... 2
1.4 Metodologi Penelitian………... 2
1.5 Sistematika Penulisan………... 3
BAB II DASAR TEORI………... 4
2.1 Mikrokontroler AT89S51……….... 4
2.1.1 Diagram Blok AT89S51………..………….. 4
2.1.2 Fungsi Kaki-kaki (Pin Out) AT89S51………..………... 4
2.1.3 Organisasi Memori……….………..….. 7
2.1.4 Informasi Cepat Instruksi AT89S51……….. 9
2.1.5 SFR (Register Fungsi Khusus) pada Keluarga 51…………... 10
2.1.6 Timer/Counter………..…... 14
2.3.1 DDRAM……….………..………... 23
2.3.2 CGRAM……….………..…………... 24
2.3.3 CGROM……….………..…………... 25
2.3.4 Pin-pin Modul M1632……….………..………….... 25
2.3.5 Register………...………... 26
2.4 Motor DC……….………... 26
2.5 IC L293D………... 27
2.6 Light Emitting Diode (LED)... 28
2.7 Pulse Width Modulation (PWM) dan Duty Cycle... 29
2.8 Menghitung Nilai Error Duty Cycle... 30
BAB III PERANCANGAN PERANGKAT KERAS DAN PERANGKAT LUNAK KENDALI JARAK JAUH PADA MODEL KAPAL…... 31
3.1 Diagram Blok………...……….…………. 31
3.2 Perancangan Perangkat Keras untuk Mekanik pada Model Kapal .. 31
3.3 Perancangan Perangkat Keras Elektronik……….…... 33
3.3.1 Antarmuka Mikrokontroler dengan 5 Input untuk Modul Master... 33
3.3.2 Antarmuka Mikrokontroler dengan LCD M1632 untuk Modul Master... 34
3.3.3 Antarmuka Mikrokontroler dengan Modul DX-24..……... 35
3.3.4 Rangkaian Mikrokontroler dengan IC Driver Motor dan Dua LED Indikator pada Modul Slave... 35
3.3.5 Rangkaian Lengkap Perancangan Perangkat Keras....……….. 37
3.4 Perancangan Perangkat Lunak……….………... 37
3.4.1 Kerangka Utama Program Modul Master…………..….…... 38
3.4.2 Subrutin Play untuk Modul Master…..……….…….... 41
3.4.3 Subrutin Help untuk Modul Master………... 42
3.4.4 Diagram Alir Program Utama untuk Modul Slave…..…...….. 43
3.4.5 Diagram Alir Subrutin Play untuk Modul Slave…………... 43
3.4.6 Diagram Alir Inisialisasi Modul DX-24………..….……….... 45
3.4.10 Diagram Alir Pengiriman Data ke LCD.…………...…... 51
3.4.11 Subrutin Tunda Waktu……….………..………... 52
BAB IV HASIL DAN PEMBAHASAN... 53
4.1 Hasil Perancangan... 53
4.2 Analisa Data Perintah yang Diterima Modul Slave dari Modul Master... 53
4.3 Analisa Jarak untuk Data Perintah yang Diterima Modul Slave dari Modul Master... 55
4.4 Analisa Data Kecepatan pada Modul Slave... 55
4.5 Analisa Data RPM Motor 1 dan Motor 2 untuk Semua Perintah dan Pilihan Kecepatan... 56
4.6 Analisa Data Duty Cycle PWM dan Data Tegangan Average untuk Motor 1 dan Motor 2... 57
4.7 Analisa Arus yang Dibutuhkan Motor 1 dan Motor 2... 58
BAB V KESIMPULAN DAN SARAN... 62
5.1 Kesimpulan... 62
5.2 Saran... 62
DAFTAR PUSTAKA
Gambar 2.1 Diagram Blok MCS-51………... 5
Gambar 2.2 Pin-Out AT89S51………... 6
Gambar 2.3 Organisasi Program Memori……… 7
Gambar 2.4 Organisasi Data Memori……….………. 8
Gambar 2.5 Peta Register Fungsi Khusus-SFR (Special Function Register)... 11
Gambar 2.6 Bit-bit Pada Program Status Word (PSW) ……….……... 11
Gambar 2.7 Bit-bit Pada Register TCON……… 14
Gambar 2.8 Bit-bit Pada Register TMOD………... 14
Gambar 2.9 Bentuk Fisik dari Modul Transceiver 2,4 GHz……….….……….. 17
Gambar 2.10 Proses Pengiriman Data dengan Mode Shockburst………….….... 18
Gambar 2.11 Proses Pengiriman Data dengan Mode Shockburst dengan Kecepatan 10 Kbps…...……….. 18
Gambar 2.12 Flowchart Proses Pengiriman Data dengan Shockburst…….…... 19
Gambar 2.13 Flowchart Proses Penerimaan Data dengan Shockburst…….…... 20
Gambar 2.14 Bentuk Konfigurasi Data Modul Transceiver 2,4 GHz…………... 21
Gambar 2.15 Bentuk Paket Data yang Ditransmisikan oleh Modul Transceiver 2,4 GHz ………... 22
Gambar 2.16 Diagram Waktu untuk Konfigurasi Data pada Modul Transceiver 2,4 GHz ………... 24
Gambar 2.17 Diagram Waktu untuk Mengirim Data pada Modul Transceiver 2,4 GHz ………... 24
Gambar 2.18 Diagram Waktu Menerima Data pada Modul Transceiver 2.4GHz……….……..……….. 25
Gambar 2.19 DDRAM M1632……….. 25
Gambar 2.20 Skema Motor DC………..……..…... 27
Gambar 2.21 Simbol Motor DC……….... 27
Gambar 2.22 Pin Out L293D………... 28
Gambar 2.23 Simbol LED (Light Emitting Diode)... 29
Gambar 2.24 Rangkaian untuk LED ... 29
Gambar 3.4 Antarmuka Mikrokontroler dengan 5 Input……….….... 34
Gambar 3.5 Antarmuka Mikrokontroler dengan Modul M1632……... 34
Gambar 3.6 Antarmuka Mikrokontroler dengan Modul DX-24………….……. 35
Gambar 3.7 Rangkaian Mikrokontroler dengan IC Driver Motor L293D... 36
Gambar 3.8 Rangkaian Lengkap Perancangan Perangkat Keras Modul Master………... 38
Gambar 3.9 Rangkaian Lengkap Perancangan Perangkat Keras Modul Slave……… 38
Gambar 3.10 Kerangka Utama Program Modul Master ……….. 39
Gambar 3.11 Diagram Alir Subrutin Pengecekan Tampilan Pilihan Speed……. 40
Gambar 3.12 Diagram Alir Subrutin Play untuk Modul Master………... 41
Gambar 3.13 Diagram Subrutin Help untuk Modul Master….……….….... 42
Gambar 3.14 Diagram Alir Program Utama Modul Slave ………... 43
Gambar 3.15 Diagram Alir Subrutin Play untuk Modul Slave ………... 44
Gambar 3.16 Diagram Alir Subrutin Pengecekan Data Speed untuk Modul Slave……….... 45
Gambar 3.17 Diagram Alir Subrutin Inisialisasi Pemancar dan Penerima DX-24……….……….…... 46
Gambar 3.18 Diagram Alir Pengiriman Data Inisialisasi dan Data Perintah (Subrutin Kirim_kan)….………... 49
Gambar 3.19 Diagram Alir Pengiriman Data Perintah pada Modul Master…... 50
Gambar 3.20 Diagram Alir Program Penerima pada Modul Slave …………... 51
Gambar 3.21 Diagram Alir Pengiriman Data ke LCD M1632………... 52
Gambar 4.1 Hasil Perancangan untuk Modul Master dan Modul Slave... 53
Gambar 4.2 Hasil Perancangan Model Kapal saat Dijalankan di atas air... 54
Gambar 4.3 Salah Satu Tampilan Menu Utama pada Modul Master (Pilihan Play)... 54
Gambar 4.4 Duty Cycle PWM Motor 1 untuk Kecepatan Fast ... 61
Tabel 2.1 Fungsi Pin-pin Port 3 ……….…... 6
Tabel 2.2 Daftar Instruksi Transfer Data yang Mengakses Ruang Memori Data Internal ………... 9
Tabel 2.3 Instruksi Membaca Tabel Tengok ………..…... 9
Tabel 2.4 Bit-bit Register PSW beserta Fungsinya ……….…………... 12
Tabel 2.5 Pemilihan Bank Register R0-R7 ………... 12
Tabel 2.6 Fungsi Bit-bit pada Register TCON………... 13
Tabel 2.7 Fungsi Bit-bit pada Register TMOD ……….………... 14
Tabel 2.8 Mode Operasi Timer/Counter ………... 14
Tabel 2.9 Penentuan Power Pengiriman RF ………... 21
Tabel 2.10 Pin Out Modul Transceiver 2,4 GHz... 22
Tabel 2.11 Pin Out M1632 LCD Hitachi ………..…... 26
Tabel 2.12 Tabel Kebenaran IC L293D (satu kanal)... 28
Tabel 2.13 Beda Potensial untuk Berbagai LED... 29
Tabel 3.1 Tabel Arah Pergerakan pada Model Kapal ... 33
Tabel 3.2 Fungsi Tombol-tombol pada Modul Master... 34
Tabel 3.3 Keadaan led 1 dan led 2 saat menerima perintah dari modul master.... 37
Tabel 3.4 Data untuk Pilihan Kecepatan ……….………... 40
Tabel 3.5 Data untuk Perintah pada Model Kapal ………….……….………... 40
Tabel 3.6 Hasil Perhitungan Duty Cycle dan Vl... 45
Tabel 3.7 Nilai Awal Inisialisasi LCD M1632... 52
Tabel 4.1 Data Perintah yang Diterima Modul Slave dari Modul Master... 54
Tabel 4.2 Data Jarak untuk Data Perintah yang Diterima Modul Slave dari Modul Master... 55
Tabel 4.3 Data Kecepatan pada Modul Slave... 56
Tabel 4.4 Data RPM Motor 1 dan Motor 2 untuk Perintah Maju, Mundur, Belok Kanan dan Belok Kiri pada Sistem... 57
Tabel 4.5 Data Duty Cycle PWM alat... 57
Tabel 4.6 Duty Cycle PWM Perancangan... 57
Maju... 60 Tabel 4.10 Daya Tahan Baterai untuk Perintah Maju... 60 Tabel 4.11 Data Arus yang Dibutuhkan Motor 1 dan Motor 2 untuk Perintah
Mundur... 60 Tabel 4.12 Daya Tahan Baterai untuk Perintah Mundur... 60
Lampiran I Rangkaian Modul Master……… L1 Lampiran II Rangkaian Modul Slave……….. L2 Lampiran III Gambar Rancangan Mekanik untuk Model Kapal dan Keterangan
Ukuran Dimensinya……… L3
PENDAHULUAN
1.1 Latar Belakang Masalah
Jika kita ingin mengendalikan suatu alat elektronis dari jarak yang jauh dan dihubungkan dengan kabel, tentu saja akan memerlukan kabel yang panjang pula. Hal ini sangat merepotkan kita untuk merawat, membawa dan menyimpan kabel tersebut. Oleh karena itu, pengendalian jarak jauh sebuah mainan elektronis tanpa kabel akan sangat mempermudah pengguna untuk memainkannya.
Bagi orang-orang yang suka memancing, hal yang sangat membosankan yaitu menunggu umpan yang akan dimakan oleh ikan. Mungkin bagi perokok-perokok aktif, mereka akan sambil merokok untuk menunggu umpan yang akan dimakan oleh ikan-ikan. Kegiatan tersebut akan sangat merugikan kesehatan mereka dan orang-orang di sekitar mereka yang bukan perokok aktif. Alangkah baiknya saat menunggu umpan ikan tersebut, kita sambil bermain mainan kapal. Mengendalikan mainan kapal dari jarak yang jauh dari umpan ikan, tentu saja tidak akan mengganggu kegiatan memancing kita dan akan sangat menyenangkan.
Sebagian besar waktu anak-anak dihabiskan dengan bermain dan berteman. Bagi para orangtua yang sibuk bekerja biasanya akan menyebabkan hubungan yang renggang antara orangtua dengan anak-anak mereka. Tentu saja mereka
harus segera menemukan cara untuk mengatasi masalah tersebut. Menemani berekreasi ke danau, sungai atau kolam ikan dan mengajak mereka bermain kendali pada mainan kapal di waktu luang merupakan salah satu altenatif pengakraban yang mudah antara orangtua dengan si buah hati.
1.2 Tujuan dan Manfaat
Tujuan yang akan dicapai yaitu membuat suatu mainan pada model kapal yang dapat dikendalikan dari jarak yang jauh (maksimal 100 meter) dengan menggunakan komunikasi gelombang radio.
Manfaat yang akan dicapai adalah: 1. Untuk masyarakat umum
a. Masyarakat dapat menggunakannya sebagai salah satu alat permainan pada saat memancing.
b. Masyarakat dapat menggunakannya sebagai salah satu alat permainan bagi keluarga saat berekreasi khususnya ke wisata bahari.
2. Untuk perkembangan ilmu
a. Menambah literatur aplikasi mikrokontroler untuk sistem kendali, yaitu untuk pengendalian suatu alat melalui gelombang radio.
1.3
Batasan Masalah:
Alat yang akan dibuat ini mempunyai perumusan masalah sebagai berikut: 1. Pengiriman dan penerimaan perintah melalui Transceiver 2,4 GHz. 2. Sistem kendali diaplikasikan menggunakan mikrokontroler AT89S51. 3. Ada 3 keadaan kecepatan yaitu fast, medium dan slow.
4. Sistem penggerak menggunakan 2 motor DC dengan power supply 9 volt.
5. Kendali arah yaitu arah maju, mundur, belok kanan, belok kiri dan stop. Untuk arah pergerakan belok kanan atau belok kiri yaitu kapal berputar di tempat dengan arah ke kanan (searah jarum jam) atau ke kiri (berlawanan dengan arah jarum jam).
6. Jarak kendali maksimal yaitu 100 meter.
1.4 Metodologi Penelitian
pengiriman dan penerimaan perintah, perancangan kendali, perancangan pemrograman dan lain-lain.
1.5 Sistematika Penulisaan
Tugas akhir ini memiliki penulisan sebagai berikut:
BAB I : PENDAHULUAN
Berisi latar belakang penelitian, tujuan dan manfaat penelitian, batasan masalah, metodologi penelitian, dan sistematika penulisan.
BAB II : DASAR TEORI
Berisi studi pustaka tentang landasan teori penelitian: mikrokontroler AT89S51, Transceiver 2,4 GHz, LCD M1632, motor DC, IC L293D, LED, PWM dan duty cycle.
BAB III : PERANCANGAN ALAT
Berisi tentang blok diagram perancangan, perancangan perangkat keras (mekanik dan elektronik) dan perancangan perangkat lunak (software) dari alat yang akan dibuat.
BAB IV : HASIL DAN PEMBAHASAN
Berisi hasil perancangan, hasil pengujian dan analisa data
BAB V : KESIMPULAN DAN SARAN
DASAR TEORI
2.1 Mikrokontroler AT89S51
2.1.1 Diagram Blok AT89S51
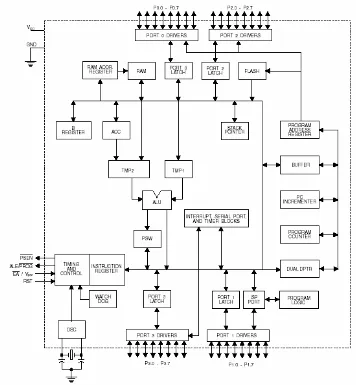
Diagram blok arsitektur AT89S51 ditunjukkan pada gambar 2.1. Pada diagram blok tersebut dapat disimpulkan bahwa untuk aplikasi yang tidak membutuhkan adanya RAM dan/atau ROM dengan skala besar, maka AT89S51 telah dapat dipergunakan dalam konfigurasi single chip. Fasilitas Parallel Port
yang dimiliki dapat dipergunakan untuk mengendalikan peralatan eksternal atau meng-input-kan data yang diperlukan. Port Serial dapat dipergunakan untuk mengakses sistem komunikasi data dengan dunia luar, misalnya dengan komputer IBM PC, atau peralatan lainnya baik langsung lewat kabel ataupun melalui modem dengan saluran telepon, radio, atau bahkan serat optik.
Timer/counter yang ada dapat dipergunakan untuk mencacah pulsa, menghitung lama pulsa, atau sebagai pewaktu umum. Sedangkan sistem interrupt membuat AT89S51 dapat dipakai pada aplikasi-aplikasi yang mendekati sistem dengan proses real-time. Rangkaian clock internal yang dimiliki AT89S51 menjadikan cukup hanya ditambahkan sebuah kristal osilator dan dua buah kapasitor untuk menghasilkan clock bagi seluruh sistem rangkaian.
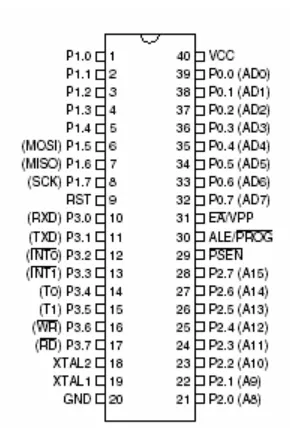
2.1.2 Fungsi Kaki-kaki (Pin Out) AT89S51
Gambar pin out AT89S51 ditunjukkan pada gambar 2.2. Fungsi kaki AT89S51 :
VSS: dihubungkan ke ground rangkaian
VCC: dihubungkan dengan tegangan catu +5 volt
beban TTL. Port 0 juga menerima dan mengeluarkan code byte selama proses pemrograman dan verifikasi ROM/EPROM internal.
Gambar 2.1. Diagram blok MCS-51
Port 1 : merupakan Port I/O 8 bit dua arah, yang dapat mengendalikan beban 4
TTL secara langsung. Setiap pin dapat diakses secara operasi tiap bit atau byte bergantung pemrogram. Port 1 juga menerima address
rendah selama proses pemrograman dan verifikasi ROM/EPROM internal.
Gambar 2.2. Pin-Out AT89S51
Port 3 : merupakan Port I/O 8 bit dua arah, yang dapat mengendalikan beban 4 TTL secara langsung. Setiap pin dapat diakses secara operasi tiap bit atau byte bergantung pemrograman. Masing-masing pin pada Port ini memiliki fungsi khusus yang ditunjukkan pada tabel 2.1.
Tabel 2.1 Fungsi pin-pin Port 3
Port Pin Fungsi alternatif P3.0 RXD (serial input port) P3.1 TXD (serial output port) P3.2 INT0 (external interrupt 0) P3.3 INT1 (external interrupt 1)
P3.4 T0 (timer/counter 0 external input) P3.5 T1 (timer/counter 1 external input) P3.6 WR (external data memory write strobe) P3.7 RD (external data memory read strobe)
RST : merupakan input untuk RESET
ALE : Address Latch Enable, digunakan untuk memberikan sinyal latch
pada alamat rendah pada multipleks bus address dan data. PSEN : merupakan sinyal read strobe untuk eksternal program memori
EA/VPP: merupakan input untuk mode program memori. Jika dihubungakan ke
XTAL1, XTAL2 : merupakan input untuk kristal clock.
2.1.3 Organisasi Memori
Pada keluarga MCS-51 pengalamatan memori dibedakan atas dua yaitu untuk program memori dan untuk data memori. Pemisahan antara program memori dan data memori merupakan ciri khas MCS-51. Masing-masing program memori dan data memori dapat mengalamati sampai 64 Kilobyte,
dengan masing-masing byte lebar datanya 8 bit.
• Program Memori
Program memori hanya dapat dibaca dan ditunjukkan pada gambar 2.3. Di sini tersimpan program yang akan dijalankan oleh AT89S51 dan data-data konstanta. Sinyal pembacaan EPROM eksternal. Pengaksesan program memori yang semuanya dari eksternal EPROM.
Gambar 2.3. Organisasi program memori
• Pemetaan Program Memori
Pemetaan program memori ditunjukkan sebagai berikut:
¾ Alamat 0000H merupakan awal program. Setelah reset, CPU akan
loncat pada alamat ini dan mengerjakan instruksi di dalamnya.
¾ Pada fungsi khusus alamat 3H dan seterusnya dengan interval 8 byte
• Data Memori
Data memori menempati alamat yang terpisah dari program memori dan
ditunjukkan pada gambar 2.4. Data memori merupakan tempat penyimpan data variabel, operasi stack dan sebagainya. Data memori dapat dibaca dan ditulis. Sinyal pembacaan untuk eksternal RAM berasal dari pin–RD dan untuk penulisan berasal dari pin –WR.
Gambar 2.4. Organisasi data memori
Alamat 00H-FFh (untuk 8051) merupakan alamat dari internal RAM yang dapat dialamati dalam dua mode. Pada alamat 00H-7FH dapat dialamati dalam mode direct maupun indirect addressing. Alamat 80H – FFH hanya dapat dialamati dalam mode direct addressing. Di luar alamat tersebut merupakan alamat eksternal RAM.
32 byte terendah data memori terbagi atas 4 buah bank yang masing-masing terdiri atas 8 buah register. Kombinasi dari bank ini ditentukan oleh register PSW. Register-register tersebut adalah R0 sampai R7 yang menempati alamat 00H – 1FH. Diatasnya merupakan segmen bit
addressable yang besarnya 16 byte, menempati alamat 20H sampai 2FH. Alamat berikutnya yaitu mulai 30H sampai 7FH dapat dibagi sebagai data RAM.
Setelah kondisi reset, kondisi baku register SP (stack Pointer) akan
register R0. Bila memakai lebih dari satu bank register maka SP harus diinisialisasi ke lokasi yang lain.
2.1.4 Informasi Cepat Instruksi AT89S51
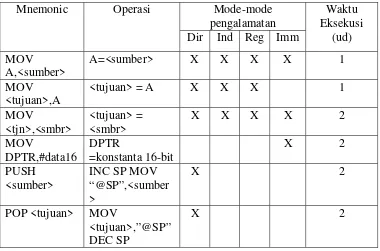
Pada tabel 2.2 ditunjukkan daftar instruksi transfer data yang mengakses ruang memori data internal serta mode pengalamatan yang terkait untuk pemindahan data antar lokasi di dalam ruang memori internal.
Tabel 2.2 Daftar instruksi transfer data yang mengakses ruang memori data internal
Mode-mode pengalamatan Mnemonic Operasi
Dir Ind Reg Imm
Waktu Eksekusi
(ud)
MOV A,<sumber>
A=<sumber> X X X X 1
MOV <tujuan>,A
<tujuan> = A X X X 1
MOV
<tjn>,<smbr>
<tujuan> = <smbr>
X X X X 2
MOV
DPTR,#data16
DPTR
=konstanta 16-bit
X 2
PUSH <sumber>
INC SP MOV “@SP”,<sumber >
X 2
POP <tujuan> MOV
<tujuan>,”@SP” DEC SP
X 2
Pada tabel 2.3 ditunjukkan instruksi yang dapat digunakan untuk membaca tabel tengok yang tersimpan dalam memori program.
Tabel 2.3 Instruksi membaca tabel-tengok
Instruksi Fungsi Waktu
eksekusi (ud) MOVC A,@A+DPTR Baca memori program di
lokasi (A+DPTR)
2
Keterangan : Smbr sumber
DPTR Data Pointer SP Stack Pointer
2.1.5 SFR (REGISTER FUNGSI KHUSUS) PADA KELUARGA 51
Sekumpulan SFR atau Special Function Register yang terdapat pada Mikrokontroler Atmel Keluarga 51 ditunjukkan pada gambar 2.5, pada bagian sisi kiri dan kanan dituliskan alamat-alamatnya dalam format heksadesimal.
Tidak semua alamat pada SFR digunakan, alamat-alamat yang tidak digunakan tidak diimplementasikan pada chip. Jika dilakukan usaha pembacaan pada alamat-alamat yang tidak terpakai tersebut akan menghasilkan data acak dan penulisannya tidak menimbulkan efek sama sekali. Pengguna perangkat lunak sebaiknya jangan menuliskan ‘1’ pada lokasi-lokasi ‘tak bertuan’ tersebut, karena dapat digunakan untuk mikrokontroler generasi selanjutnya. Dengan demikian, nilai-nilai reset atau non-aktif dari bit-bit baru ini akan selalu ‘0’ dan nilai aktifnya adalah ‘1’. Berikut akan dijelaskan secara singkat SFR-SFR beserta fungsinya:
Akumulator
ACC atau akumulator yang menempati lokasi E0h digunakan sebagai register untuk penyimpanan data sementara, dalam program, instruksi mengacunya sebagai register A (bukan ACC).
Register B
Register B (lokasi F0h) digunakan selama operasi perkalian dan pembagian, untuk instruksi lain dapat diperlakukan sebagai register scratch pad (“papan coret-coret”) lainnya.
Program Status Word (PSW)
Register PSW (lokasi D0h) berisikan informasi status program. Register
Gambar 2.5 Peta Register Fungsi Khusus–SFR (Special Function Register )
CY AC F0 RS1 RS0 OV - P
(MSB) (LSB) Gambar 2.6. Bit-bit pada Program Status Word (PSW)
Stack Pointer
Register SP atau Stack Pointer (lokasi 81h) merupakan register dengan
panjang 8-bit, digunakan dalam proses simpan dan ambil dari/ke stack. Nilainya akan dinaikkan sebelum data disimpan menggunakan instruksi PUSH dan
CALL. Walau stack bisa menempati lokasi di mana saja dalam RAM, register
SP akan selalu diinisialisasi ke 07h setelah adanya reset, hal ini menyebabkan
stack berawal di lokasi 08h.
Data Pointer
Register Data Pointer atau DPTR berupa DPTR untuk byte tinggi (DPH)
Dapat dimanipulasi sebagai register 16-bit atau sebagai dua register 8-bit yang terpisah.
Tabel 2.4 Bit-bit register PSW berserta fungsinya
Simbol Posisi Nama dan Arti CY PSW.7 Carry flag
AC PSW.6 Auxiliary carry flag, untuk operasi menggunakan bilangan BCD (binarycoded decimal)
F0 PSW.5 Flag 0, bisa digunakan untuk keperluan pemakai RS1 PSW.4 Bit 1 pemilih bank register *)
RS0 PSW.3 Bit 0 pemilih bank register *) OV PSW.2 Overflow flag
- PSW.1 Flag yang dapat didefinisikan oleh pemakai P PSW.0 Parity flag yang di-set atau di-clear oleh hardware
setiap siklus instruksi untuk memberikan kode
parity terhadap isi register Akumulator
*) RS1 dan RS0 menentukan pemilihan register bank sebagai berikut:
Tabel 2.5 Pemilihan bank register R0-R7
RS1 RS0 Bank Address Register R0-R7
0 0 0 00h-07h
0 1 1 08h-0fh
1 0 2 10h-17h
1 1 3 18h-1fh
Port 0, Port 1, Port 2 dan Port 3
P0, P1, P2 dan P3 masing-masing menempati lokasi 80h, 90h, A0h, dan
B0h merupakan pengunci-pengunci (latches), yang digunakan untuk
menyimpan data yang akan dibaca atau ditulis dari/ke port, untuk masing-masing Port 0, Port 1, Port 2 dan Port 3.
Serial Data Buffer
Control Register
Control register pada keluarga 51 yaitu register-register IP, IE, TMOD,
TCON, T2CON, T2MOD, SCON dan PCON yang berisi bit-bit kontrol dan status untuk sistem interupsi, Pencacah/Pewaktu dan port serial.
Register TCON (Timer/Counter Control)
Register yang memiliki address 088h berfungsi untuk mengontrol fungsi
Timer 1 dan Timer 0, mengatur respons MCS-51 terhadap level tegangan pada
input external interupt, serta memberikan tanpa flag jika telah ada sinyal
interrupt external. Bit-bit pada register TCON ditunjukkan pada gambar 2.7 dan fungsi bit-bit pada register TCON ditunjukkan pada tabel 2.6.
Tabel 2.6 Fungsi bit-bit pada register TCON
Simbol Posisi Nama dan arti
TF1 TCON.7 Timer 1 overflow flag. Bit ini di-set oleh hardware
pada saat terjadi overflow di timer/counter 1. Bit tersebut akan otomatis di-clear oleh hardware pada saat mikrokontroler mengeksekusi program pelayanan interruptTimer 1
TR1 TCON.6 Timer 1 run control bit, untuk membuat ON/OFF Timer/counter 1
TF0 TCON.5 Timer 0 overflow flag. Bit ini di-set oleh hardware
pada saat terjadi overflow di timer/counter 0. Bit tersebut akan otomatis di-clear oleh hardware pada saat mikrokontroler mengeksekuksi program pelayanan interrupt Timer 0
TR0 TCON.4 Timer 0 run control bit, untuk membuat ON/OFF Timer/counter 0
IE1 TCON.3 Interrupt Edge 1 = 1 menunjukkan adanya sinyal
interrupt pada pin external interrupt 1 IT1 TCON.2 Type interrupt 1
IT1=1 : falling edge triggered interrupt
IT1=0 : low level triggered interrupt
IE0 TCON.1 Interrupt Edge 0 = 1 menunjukkan adanya sinyal
interrupt pada pin eksternal interrupt 0 IT0 TCON.0 Type interrupt 0
IT0 = 1 : falling edge triggered interrupt
IT0 = 0 : low level triggered interrupt
Register TMOD (Timer/Counter Mode)
Fungsi dari bit-bit register TMOD dapat ditunjukkan pada tabel 2.7 dan mode operasi timer/counter dapat ditunjukkan pada tabel 2.8.
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
(MSB) (LSB) Gambar 2.7. Bit-bit pada register TCON
GATE C/-T M1 M0 GATE C/-T M1 M0
(MSB) (LSB)
Timer 1 Timer 0 Gambar 2.8. Bit-bit pada register TMOD
Tabel 2.7 Fungsi bit-bit pada register TMOD
Bit Fungsi GATE Untuk menentukan apakah timer/counter dikontrol oleh hardware
atau software
GATE = 1 : hardware control : timer/counter x aktif jika pin INTx dalam kondisi high dan TRx pada register TCON diaktifkan GATE = 0 : software control : timer/counter x aktif jika TRx pada register TCON diaktifkan
C/-T Counter/timer mode
M1 Selector mode
M0 Selector mode
Tabel 2.8 Mode operasi timer/counter
M1 M0 Mode Operasi
0 0 13-bit timer
0 1 16-bit timer/counter
1 0 8-bit auto-reload timer/counter
1 1 (Timer 0) : TL0 berfungsi sebagai 8–bit timer/counter yang dikontrol oleh control bit Timer 0 yang standard, sedangkan TH0 adalah 8-bit timer yang dikontrol oleh control bit
Timer 1. Pada mode ini Timer/counter 1 berhenti beroperasi
2.1.6 Timer/Counter
Mikrokontroler MCS-51 memiliki 2 buah timer/counter pada jenis 8051.
Timer/counter tersebut memiliki lebar data 16 bit. Perbedaan fungsi
clock internal, maka fungsi yang dijalankan adalah sebagai timer, sedangkan jika yang dicacah adalah pulsa eksternal, maka fungsinya adalah counter.
Mode Operasi
Timer/counter dapat dioperasikan dalam 4 mode. Pengaturan mode ini melalui bit-bit M1 dan M0 pada register TMOD. Fungsi Timer mencacah pulsa
clock internal dengan frekuensi 1/12 frekuensi osilator, sedangkan fungsi
counter mencacah pulsa clock eksternal melalui pin T0, T1 atau T2. Untuk lebih mudahnya, pada penjelasan berikutnya istilah timer/counter akan disingkat sebagai timer saja.
Mode 0:
Pada mode ini timer 1 bekerja dengan lebar data 13 bit, terdiri dari 8 bit tinggi pada register TH1 dan 5 bit rendah pada register TL1. Bit tertinggi sejumlah 3 pada register TL1 tidak dipergunakan dan isinya acak. Pada saat pencacahan mencapai data 07FFH (semua bit pada register timer 13 bit adalah 1) maka pada pencacahan berikutnya data pencacahan menjadi 0000h (terjadi
overflow). Di saat kondisi ini terjadi timer 1 men-set flag interrupt TF1 pada register TCON. Untuk mengaktifkan pencacahan pada timer 1, ada dua metode yang bisa dilakukan yaitu:
Sinyal trigger start timer oleh hardware:
Bit GATE pada register TMOD di-set ‘1’ dan bit TR1 pada register TCON diaktifkan. Timer/counter 1 aktif jika pin INT 1 dalam kondisi high.
Sinyal trigger start timer oleh software:
Bit GATE pada register TMOD di-clear. Timer/counter 1 aktif jika TR1 pada register TCON diaktifkan.
Pengaturan yang dilakukan pada timer 0 adalah indentik dengan timer 1. Mode 1:
Pada mode 1 timer bekerja dengan lebar data 16 bit. Pengaturan dan metode
kerjanya sama dengan mode 0.
Mode 2:
harga awal setelah terjadi overflow. Overflow sebagaimana pada mode 0 dan 1 akan men-set bit TF1 pada register TCON. Pengaturan yang dilakukan pada
timer 0 adalah identik dengan timer 1.
Mode 3:
Timer 1 pada mode 3 berada pada posisi hold (menggenggam) register pencacahannya dan berhenti bekerja. Sedangkan timer 0 bekerja sebagai dua
buah timer 8 bit, masing-masing adalah TH0 dan TL0. Pengaturan timer TL0 adalah melalui bit TR0, dan bit TF0 akan di-set jika terjadi overflow. Pada timer
TH0 pengaturannya adalah melalui bit TR1, dengan bit TF1 akan di-set jika
overflow.
Jika timer 0 bekerja dengan mode 3, maka timer 1 dapat bekerja dengan mode 0, 1 atau 2 kecuali dengan kondisi TF1 tidak dapat di-set oleh timer 1 jika terjadi overflow, karena TF1 di-set oleh timer TH0.
2.2 Modul
Transceiver
2,4 GHz (DX-24)
Mode pengiriman data untuk modul Transceiver 2,4 GHz adalah secara serial. Pada pengiriman data secara serial, data dikirim satu per satu, berganti per bit data. Pengiriman data serial modul ini menggunakan gelombang radio. Data yang akan dikirimkan ditumpangkan pada frekuensi pembawa dan dipancarkan di udara oleh pemancar. Pada penerima frekuensi pembawa yang mengandung data ditangkap dan dipisahkan dari data yang dibawa.
Modul tersebut dapat mengirimkan dan menerima data serial melalui media udara, dengan kecepatan 1 Mbps atau 250 Kbps dengan range frekuensi 2,4-2,52
GHz ISM band. Modul tersebut bekerja dengan supply 1,9-3 VDC. Dalam 1 modul terdapat sebuah pengiriman dan 2 buah penerima yang dapat digunakan secara simultan. Bentuk fisik dari modul TRF 2,4 GHz adalah seperti gambar 2.9. Data serial yang akan dipancarkan melalui RF diumpankan ke modul TRF-2,4 GHz oleh mikrokontroler secara syncronous serial. Begitu pula data yang diterima akan diambil oleh mikrokontroler secara syncronous serial.
Pada modul tersebut terdapat 2 macam mode proses pengiriman dan penerimaan data serial, yaitu mode Shockburst dan mode Direct. Mode
melalui jalur 2,4 GHz band tanpa memerlukan mikrokontroler berkecepatan tinggi untuk proses pengiriman data. Sedangkan mode Direct adalah mode pengiriman data secara konvensional, sehingga modul TRF 2,4 GHz bekerja seperti RF pada umumnya. Pada mode direct, data serial yang akan dikirimkan melalui RF haruslah berkecepatan 1 Mbps atau 250 Kbps, agar penerima dapat mendeteksi sinyalnya, sehingga memerlukan mikrokontroler yang berkecepatan tinggi pula. Agar dapat bekerja dengan mode yang diinginkan, modul TRF-2,4 GHz perlu
dikonfigurasi. Proses konfigurasi ini dapat dilakukan hanya dengan menggunakan 3 kabel interface, dengan kecepatan transfer datanya diatur oleh mikrokontroler, karena menggunakan transmisi data syncronous serial.
Gambar 2.9 Bentuk fisik dari modul Transceiver 2,4 GHz
Ketika TRF 2,4GHz dikonfigurasikan pada mode shockburst, proses pengiriman data adalah seperti gambar 2.10 dan gambar 2.11, dengan kecepatan transfer sebagai contoh adalah 10 Kbps. Pada proses pengiriman data seperti terdapat pada gambar 2.10 dan 2.11, pengiriman data digital yang berasal dari mikokontroler berjalan dengan kecepatan rendah, sedangkan pengiriman data RF berjalan pada kecepatan tinggi. Sehingga dengan memaksimalkan kecepatan pengiriman data pada jalur RF, maka mode shockburst dapat mengurangi konsumsi daya rata-rata. Selain itu, karena mode ini semua proses pengolahan sinyal berkecepatan tinggi telah ditangani oleh protokol RF modul, maka tidak memerlukan mikrokontroler berkecepatan tinggi untuk pengolahan sinyal.
2.2.1 Konfigurasi Transceiver 2,4 GHz
Modul Transceiver 2,4 GHz mempunyai 2 mode kerja dan mempunyai 125 kanal operasi dengan bandwidth masing-masing kanal 1 Mbps. Mode konfigurasi hanya memerlukan 3 jalur data, yaitu CS, CLK1 dan DATA1. Pada mode konfigurasi, data sebanyak 144 bit dikirimkan ke modul Transceiver 2,4 GHz secara serial sinkron, dengan mengirimkan MSB terlebih dahulu (bit ke 143). Bentuk konfigurasi data secara keseluruhan adalah pada gambar 2.14.
Gambar 2.10. Proses pengiriman data dengan mode shockburst
Gambar 2.11. Proses pengiriman data dengan mode shockburst dengan kecepatan 10 Kbps
Penjelasan dari data konfigurasi tersebut adalah, bit ke 143 sampai bit 120 diabaikan, bit ke 119 sampai 16 adalah bit konfigurasi untuk penggunaan modul dengan mode kerja shockburst, sedangkan bit ke 15 sampai bit ke 0 adalah bit konfigurasi secara umum, baik untuk mode kerja shockburst maupun mode kerja direct.
Penjelasan untuk konfigurasi data untuk mode kerja shockburst adalah, bit ke 119 sampai bit ke 112 adalah DATA2_W, yaitu bit yang menyatakan panjang payload yang akan dikirimkan ke penerima pada kanal 2. Bit 111
sampai 104 adalah DATA1_W, yaitu bit yang menyatakan panjang payload
40 bit. Bit ke 63 sampai 24, adalah ADDR1, yaitu alamat penerima untuk kanal 1, dengan panjang alamat sampai 40 bit. Bit ke 23 sampai 18 adalah ADDR_W, yaitu panjang bit yang digunakan untuk bit alamat pada ADDR2 dan ADDR1. Bit ke 17 adalah bit CRC_L yaitu bit untuk menentukan panjang dari CRC yang akan dikalkulasi oleh modul Transceiver 2,4 GHz. Jika bit ke 17 diberi logika 1 maka modul Transceiver akan mengkalkulasi 16 bit CRC. Bit ke 16 adalah bit CRC_EN, yaitu bit untuk mengaktifkan sistem kalkulasi dan pengecekan CRC
internal modul.
Gambar 2.12. Flowchart proses pengiriman data dengan shockburst
Bit ke 15 sampai 0 adalah bit konfigurasi modul secara umum, penjelasan dari bit-bit tersebut adalah, bit 15 adalah bit RX2_EN, yaitu bit untuk menentukan kanal penerima, apakah menggunakan kanal 1 atau kanal 2 sekaligus. Jika bit 15 diberi logika 1 maka modul Transceiver akan bekerja
bit untuk menentukan mode kerja modul, apakah bekerja dengan mode
shockburst atau direct. Jika bit ke 14 diberi logika 1 maka modul Transceiver
Gambar 2.13. Flowchart proses penerimaan data dengan shockburst
akan bekerja dengan mode shockburst, sebaliknya jika diberi logika 0 maka modul akan bekerja dengan mode direct. Bit ke 13 adalah bit untuk menentukan kecepatan data RF maksimum, jika diberi logika 1 maka kecepatan data adalah 1 Mbps, jika diberi logika 0 maka kecepatan data adalah 250 Kbps. Bit 12 sampai bit 10 adalah bit X0_F, yaitu bit untuk menentukan frekuensi kristal yang digunakan oleh modul Transceiver. Bit ke 9 dan 8 adalah bit untuk menentukan power pengiriman RF, seperti terdapat pada tabel 2.9. Sedangkan bit ke 7 sampai bit ke 1 adalah RF_CH#, yaitu bit untuk menentukan kanal RF yang akan digunakan untuk menghitung frekuensi kanal pada transmiter
memilih apakah modul Transceiver bekerja sebagai pengirim dan penerima. Jika berlogika 0 maka modul Transmiter bekerja sebagai pengirim sedangkan jika berlogika 1 maka modul Transceiver akan bekerja sebagai penerima.
Gambar 2.14. Bentuk konfigurasi data modul Transceiver 2,4 GHz
Tabel 2.9 Penentuan power pengiriman RF
RF OUTPUT POWER
D9 D8 P(dBm)
0 0 -20
0 1 -10
1 0 -5
1 1 0
Bentuk paket data yang ditransmisikan oleh modul Transceiver 2,4 GHz adalah seperti gambar 2.15, bentuk paket ini digunakan baik pada mode kerja
shockburst ataupun pada mode kerja direct. PREAMBLE adalah bit tambahan yang dipergunakan untuk sinkronisasi antara penerima dan pengirim.
ADDRESS adalah bit untuk menentukan alamat penerima. PAYLOAD adalah data yang dikirimkan, sedangkan CRC adalah kode untuk mengetahui telah banyak terjadi perubahan data pada proses pengiriman. Untuk mode kerja
shockburst, bagian PREAMBLE dan CRC telah ditangani oleh modul
Transceiver, sehingga pengguna hanya mengirimkan alamat tujuan dan data saja, sedangkan pada mode kerja direct, semua ditentukan sendiri oleh pengguna, mulai dari PREAMBLE sampai CRC, walaupun begitu CRC dapat tidak dipergunakan.
Gambar 2.15. Bentuk paket data yang ditransmisikan oleh modul Transceiver 2,4 GHz
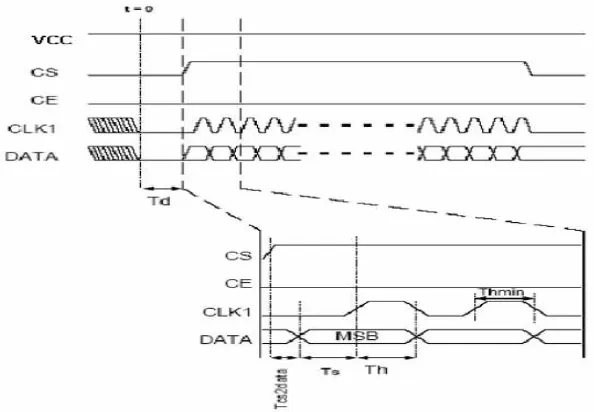
Diagram waktu untuk konfigurasi data adalah seperti pada gambar 2.16.
Sedangkan untuk mengirim dan menerima data dengan mode shockburst adalah seperti gambar 2.17 dan 2.18.
2.2.2 Pin Out Modul Transceiver 2,4 GHz (DX-24)
Pin out modul Transceiver 2,4 GHz ditunjukkan pada tabel 2.10.
Tabel 2.10 Pin out modul Transceiver 2,4 GHz
Pin Modul DX-24 Nama Tipe/Arah
1 GND Power
2 VCC (5V) Power
3 CE Input
4 DR2 Output
5 CLK2 Input
6 DATA2 Input/Output
7 CS Input
8 DR1 Output
9 CLK1 Input
Keterangan:
CS : Chip Select berfungsi untuk mengaktifkan pengaturan konfigurasi DX-24. CE : Chip Enable berfungsi untuk mengaktifkan pemancar atau penerima pada
DX-24.
CLK1 : Clock Input untuk TX atau RX kanal 1. DATA1 : RX Data untuk kanal 1 atau TX Data Input. DR1 : Indikator data telah diterima pada RX kanal 1.
CLK2 : Clock Input untuk RX kanal 2. DATA2 : RX Data untuk kanal 2.
DR2 : Indikator data telah diterima pada RX kanal 2.
Untuk pengaturan konfigurasi, pin-pin yang digunakan yaitu CE(0b), CS(1b), CLK1 dan DATA1. Untuk pengiriman data lewat pemancar (TX), pin-pin yang digunakan yaitu CS(0b), CE(1b), CLK1 dan DATA1. Sedangkan untuk penerima (RX), pin-pin yang digunakan yaitu CS(0b), CE(1b), CLK1, DR1 (untuk kanal 1), DATA1 (untuk kanal 1) dan untuk penerima kanal 2, pin-pin yang digunakan yaitu CS(0b), CE(1b), CLK2, DR2 dan DATA2.
Pada TX hanya ada 1 kanal yang dapat digunakan. Sedangkan untuk RX, ada 2 kanal yang dapat digunakan yaitu kanal 1 dan kanal 2.
2.3 Modul LCD M1632
M1632 merupakan modul LCD dengan tampilan 16 x 2 baris dengan
konsumsi daya yang rendah. Modul ini dilengkapi dengan mikrokontroler yang didisain khusus mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali LCD ini mempunyai CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random AccessMemory) dan DDRAM (Display Data Random Access Memory).
2.3.1 DDRAM
Gambar 2.16. Diagram waktu untuk konfigurasi data pada modul Transceiver 2,4 GHz
Gambar 2.17. Diagram waktu untuk mengirim data pada modul Transceiver 2,4 GHz
2.3.2 CGRAM
Gambar 2.18. Diagram waktu untuk menerima data pada modul Transceiver 2,4 GHz
Gambar 2.19. DDRAM M1632
2.3.3 CGROM
CGROM merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga pengguna tidak dapat mengubah lagi. Namun karena ROM bersifat permanen, maka pola karakter tersebut tidak akan hilang walaupun power supply tidak aktif.
2.3.4 Pin-pin Modul M1632
Tabel 2.11. Pin Out M1632 LCD Hitachi
No. Nama Pin Deskripsi
1 VCC +5V
2 GND 0V
3 VEE Tegangan Kontras LCD
4 RS Register Select, 0=Register Perintah, 1= Register Data
5 R/W 1=Read, 0=Write
6 E Enable Clock LCD, logika 1 setiap kali
pengiriman atau pembacaan data 7 D0 Data Bus 0
8 D1 Data Bus 1 9 D2 Data Bus 2 10 D3 Data Bus 3 11 D4 Data Bus 4 12 D5 Data Bus 5 13 D6 Data Bus 6 14 D7 Data Bus 7 15 VBL+ 4-4.2 volt
16 VBL- GND
2.3.5 Register
HD44780, mempunyai dua buah Register yang aksesnya diatur dengan menggunakan kaki RS. Pada saat RS berlogika 0, maka register yang diakses adalah Register Perintah dan pada saat RS berlogika 1, maka register yang diakses adalah Register Data. Untuk penulisan data ke register dilakukan dengan memberi perintah logika 0 pada R/W dan logika 1 pada E disertai data yang akan dikirimkan. Untuk pembacaan data pada register dilakukan dengan memberi perintah logika 1 pada R/W dan logika 1 pada E. Untuk penulisan atau pembacaan pada register 4 bit interface dilakukan 4 nibble tinggi dahulu, kemudian disusul oleh 4 nibble rendah. Sedangkan penulisan atau pembacaan pada register 8 bit interface dilakukan langsung dengan 8 bit.
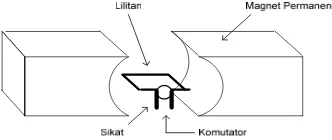
2.4 Motor DC
buatan. Karena berada dalam medan magnet permanen maka terjadilah perpotongan medan magnet sehingga lilitan menerima gaya tolak dan mendorong lilitan untuk berputar.
Gambar 2.20. Skema motor DC
Pada gambar 2.20 saat lilitan berputar maka komutator juga akan ikut berputar, komutator adalah sebuah plat tembaga berbentuk cincin yang terbelah. Komutator ini berfungsi membalik arah arus dalam lilitan sehingga terjadi perubahan arah arus yang menyebabkan lilitan jangkar berputar terus. Arus listrik masuk melalui sikat dan dengan mengubah arah arus pada sikat, maka dapat menentukan putaran motor searah putaran jarum jam (Clock Wise, CW) atau berlawanan arah putaran jarum jam (Counter Clock Wise, CCW). Simbol motor DC ditunjukkan pada gambar 2.21.
Gambar 2.21. Simbol Motor DC
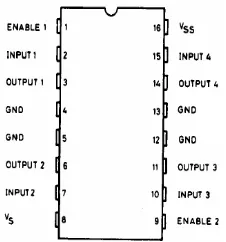
2.5 IC L293D
Gambar 2.22. Pin Out L293D
Tabel 2.12. Tabel kebenaran IC L293D (satu kanal)
Input Enable (*) Output
H H H
L H L
H L Z
L L Z
Z = High Output Impedance
(*) Relatif dengan kanal yang digunakan
2.6
Light Emitting Diode
(LED)
LED adalah dioda semikonduktor yang memancarkan spektrum cahaya sempit yang tersebar ketika dibias tegangan maju pada sambungan p-n. LED adalah sumber daerah yang kecil, sering dengan ditambahkan cahaya ekstra ke chip untuk membentuk pola radiasi. Warna cahaya yang terpancar bergantung pada komposisi dan kondisi dari bahan semikonduktor yang digunakan. Simbol led ditunjukkan pada gambar 2.23. Arus maksimal yang dibutuhkan led pada umumnya yaitu 20 mA. Sehingga nilai resistor yang paling kecil dapat dihitung pada persamaan 2.5. Pada umumnya led, standar yaitu paket 3 mm atau 5 mm, sesuai dengan beda potensial yang diukur. Beda potensial atau tegangan maju bergantung pada bahan kimia, suhu dan arus dari led itu. Beda potensial led untuk tiap warna ditunjukkan pada tabel 2.13. Gambar rangkaian untuk led ditunjukkan pada gambar 2.24.
I V
Rmin= R_MIN ...(2.4)
mA Vled V
R
20
Keterangan:
V adalah tegangan catudaya (volt). Vled adalah beda tegangan pada led.
Rmin adalah hambatan yang diserikan dengan led (Ohm,Ω). I adalah arus (Ampere)
Gambar 2.23. Simbol LED (Light Emitting Diode)
0 R 3
R m in
D 11 LED
BT1 V (c at uday a)
1 2
Gambar 2.24. Rangkaian untuk led
Tabel 2.13 Beda potensial untuk berbagai warna led
Warna Beda Potensial (volt) Infrared 1,6
Merah 1,8 sampai 2,1 Jingga 2,2
Kuning 2,4 Hijau 2,6
Biru 3 sampai dengan 3,5 Putih 3 sampai dengan 3,5 Ultraviolet 3,5
2.7
Pulse Width Modulation
(PWM) dan
Duty Cycle
o
mengontrol atau mengendalikan besar daya yang diberikan ke beban. Kendali PWM yaitu dengan meng-on atau meng-off-kan sumber daya ke beban dengan cepat. Tegangan DC dikonversi menjadi sinyal gelombang kotak (tegangan on
mendekati tegangan sumber daya dan tegangan off sama dengan ground). Dengan mengatur duty cycle sinyal PWM, daya rata-rata dapat bervariasi dan oleh karena itu, kecepatan beban juga dapat bervariasi.
Duty cycle (D) adalah perbandingan antara durasi pulsa n (τon) dan
periode (T) gelombang kotak. Persamaan untuk menghitung duty cycle (dalam persentase) dapat dihitung dengan persamaan 2.6. Untuk menghitung tegangan
pada beban (misal motor DC), Vl, digunakan persamaan 2.7.
% 100 % 100 × + = × = off on on on T D τ τ τ τ ...(2.6) Vin D
Vl = × ……….(2.7)
Keterangan:
D = Duty cycle (%)
on
τ = Durasi waktu on
T = Periode gelombang kotak
off
τ = Durasi waktu off
l
V = Nilai tegangan yang diberikan kepada beban
in
V = Nilai tegangan dari catu daya
2.8 Menghitung Nilai
Error Duty Cycle
Rumus untuk menghitung error duty cycle ditunjukkan pada persamaan 2.8.
n perancanga cycle duty Nilai pengukuran cycle duty Nilai n perancanga cycle duty Nilai cycle duty Error _ _ _ _ _ _ _ _ _ _
PERANCANGAN PERANGKAT KERAS DAN
PERANGKAT LUNAK KENDALI JARAK JAUH
PADA MODEL KAPAL
Secara garis besar pengendalian remote pada model kapal terdiri dari 2 bagian, yaitu bagian perangkat keras dan bagian perangkat lunak. Bagian perangkat keras terdiri atas interfacing mikrokontroler AT89S51 dengan input dan output serta mekanik pada model kapal. Bagian perangkat lunak berupa program di dalam AT89S51 untuk menangani input dan output.
3.1 Diagram Blok
Diagram blok terdiri dari diagram blok untuk modul master dan modul
slave. Diagram blok modul master dapat dilihat pada gambar 3.1 dan diagram blok modul slave dapat dilihat pada gambar 3.2. Untuk diagram blok modul
master, masukan terdiri dari 5 buah tombol dan output berupa tampilan di LCD M1632 dan modul pemancar dx-24. Untuk diagram blok modul slave, input
berasal dari modul penerima dx-24 sedangkan output berupa IC driver motor L293D yang mengendalikan 2 buah motor DC dan 2 led untuk indikator penerimaan data. Modul master diistilahkan penulis untuk pengendalian
pergerakan pada model kapal dari pemancar. Sedangkan modul slave
diistilahkan penulis untuk pengendalian pergerakan motor DC pada penerima.
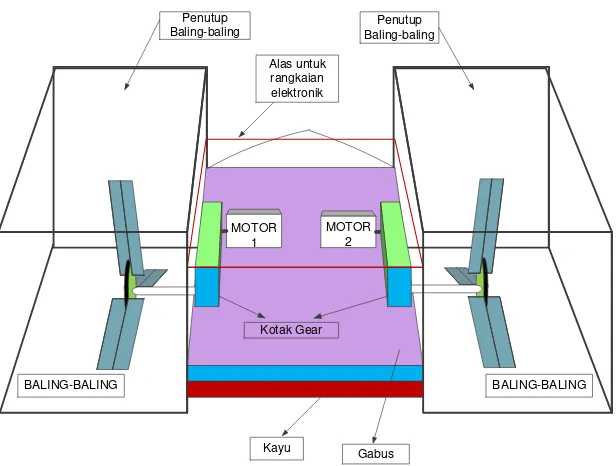
3.2 Perancangan Perangkat Keras Untuk Mekanik Pada Model
Kapal
Gambar 3.1 Diagram blok modul master
Gambar 3.2 Diagram blok modul slave
Tabel 3.1 menunjukkan arah pergerakan pada model kapal yang ditentukan
dari putaran motor 1 dan motor 2. Arah pergerakan pada model kapal ada empat
yaitu maju, mundur, belok kanan dan belok kiri. Jika motor 1 berputar CW
(Clock Wise) dan motor 2 berputar CCW (Counter Clock Wise), maka arah
gerakan kapal akan maju. Sebaliknya, jika motor 1 berputar CCW dan motor 2
berputar CW, maka arah gerakan kapal akan mundur. Jika kedua motor berputar
CW, maka arah gerakan kapal akan belok kanan. Jika kedua motor berputar
CCW, maka arah gerakan kapal akan belok kiri.
Kedua motor dikendalikan oleh sebuah mikrokontroler. Mikrokontroler akan
menerima input data perintah dari modul master melalui penerima (receiver)
dx-24 dan memprosesnya. Setelah itu, mikrokontroler akan mengeluarkan output
untuk mengendalikan kedua arah putaran motor melalui sebuah IC driver motor
MOTOR 2
BALING-BALING Penutup
Baling-baling Baling-balingPenutup
Alas untuk rangkaian elektronik
Gabus MOTOR
1
Kotak Gear
BALING-BALING
Kayu
Gambar 3.3. Konstruksi model kapal tampak atas
Tabel 3.1. Tabel arah pergerakan pada model kapal
Putaran Motor 1 Putaran Motor 2 Arah Gerakan Pada Model Kapal
CW CCW Maju
CCW CW Mundur
CW CW Belok Kanan
CCW CCW Belok Kiri
Keterangan :
CW (Clock Wise)
CCW (Counter Clock Wise)
3.3 Perancangan Perangkat Keras Untuk Elektronik
3.3.1 Antarmuka Mikrokontroler Dengan 5 Input Untuk Modul Master
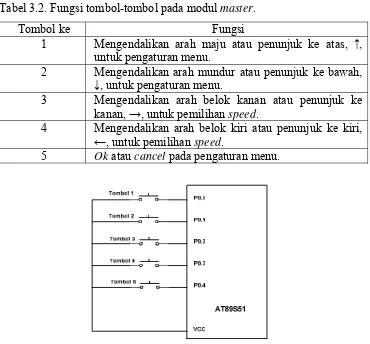
Gambar 3.4 merupakan antarmuka mikrokontroler dengan 5 buah input.
Kelima input ini terdiri dari 5 buah tombol. Fungsi tombol-tombol pada modul
master ditunjukkan pada tabel 3.2.
Untuk port 0 pada AT89S51 hanya dapat digunakan current sink jika port 0
digunakan sebagai input ke mikrokontroler. Current sink yaitu arus yang berasal
dari power supply luar (VCC) masuk ke beban TTL (misal Port 0).
Jenis tombol yang digunakan adalah tombol push to make. Tombol push to
Tombol push to make akan kembali ke posisi normally open (off) jika tombol
tersebut tidak ditekan.
Tabel 3.2. Fungsi tombol-tombol pada modul master.
Tombol ke Fungsi
1 Mengendalikan arah maju atau penunjuk ke atas, ↑,
untuk pengaturan menu.
2 Mengendalikan arah mundur atau penunjuk ke bawah,
↓, untuk pengaturan menu.
3 Mengendalikan arah belok kanan atau penunjuk ke
kanan, →, untuk pemilihan speed.
4 Mengendalikan arah belok kiri atau penunjuk ke kiri,
←, untuk pemilihan speed.
5 Ok atau cancel pada pengaturan menu.
Gambar 3.4. Antarmuka mikrokontroler dengan 5 input
3.3.2 Antarmuka Mikrontroler Dengan LCD M1632 Untuk Modul Master
Antarmuka mikrokontroler dengan LCD M1632 ditunjukkan pada gambar
3.5. Pengiriman data ke register perintah dan register data digunakan 4 bit (P2.7,
P2.6, P2.5 dan P2.4). Untuk pengaturan pengiriman data digunakan pin P3.5,
pin P3.3, dan pin P3.4.
3.3.3 Antarmuka Mikrokontroler Dengan Modul DX-24
Antarmuka mikrokontroler dengan modul pemancar-penerima modul dx-24
ditunjukkan pada gambar 3.6. Antarmuka mikrokontroler dengan modul dx-24
terdiri dari 8 bit dan menggunakan sumber daya yang sama yaitu 5 volt.
Gambar 3.6. Antarmuka mikrokontroler dengan modul dx-24
Untuk modul master dan modul slave, konfigurasi modul dx-24
menggunakan pin-pin yang sama yaitu CE(0b), CS(1b), CLK1 dan DATA1.
Pada saat konfigurasi, DATA1 berfungsi sebagai input bagi modul dx-24.
Untuk pengiriman data pada modul master, pin-pin yang akan digunakan yaitu
CS(0b), CE(1b), CLK1 dan DATA1. Pada saat pengiriman data pada modul
master, DATA1 berfungsi sebagai input bagi modul dx-24. Untuk penerimaan
data pada modul slave, pin-pin yang digunakan yaitu CS(0b), CE(1b), CLK1,
DR1 dan DATA1. Pin DR1 pada modul slave berfungsi sebagai indikator ke
mikrokontroler bahwa ada data yang telah diterima. Untuk penerimaan data
pada modul slave, DATA1 sebagai output dari modul dx-24.
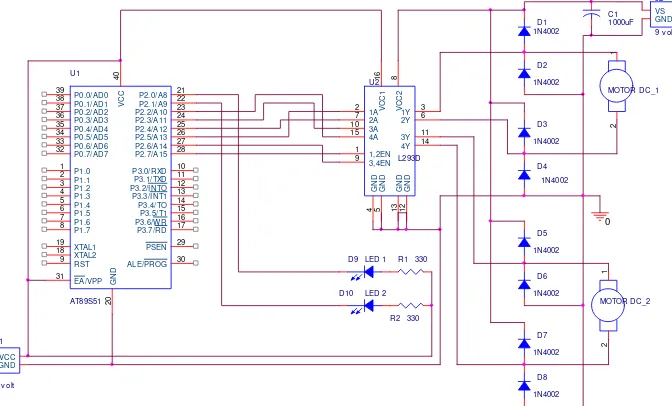
3.3.4 Rangkaian Mikrokontroler Dengan IC Driver Motor Dan Dua LED
Indikator Pada Modul Slave
Gambar 3.7 merupakan rangkaian mikrokontroler dengan IC driver motor
L293D. Ada 6 bit yang digunakan untuk mengendalikan IC driver motor
tersebut. Keenam bit itu yaitu 2 bit pengendali enable dan 2 bit pengendali
motor pertama serta 2 bit lagi sebagai pengendali motor kedua. Untuk pasangan
mengamankan tegangan balik dari motor DC ke sumber daya. Tegangan balik
terjadi ketika tegangan pada motor DC menjadi nol saat sedang dihidupkan.
0 U1 AT89S51 9 18 19 20 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA/VPP VC C P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 MOTOR DC_1 1 2 D1 1N4002 MOTOR DC_2 1 2 D3 1N4002 D2 1N4002 D4 1N4002 D6 1N4002 D5 1N4002 D7 1N4002 D8 1N4002 R1 330
D10 LED 2 D9 LED 1
R2 330 J1
5 v olt
GND VCC
J2 9 v olt
VS GND U2 L293D 2 7 10 15 1 9 3 6 11 14 16 8
4 5 13 12
1A 2A 3A 4A 1,2EN 3,4EN 1Y 2Y 3Y 4Y VC C 1 VC C 2 GN D GN D GN D GN D C1 1000uF
Gambar 3.7. Rangkaian mikrokontroler dengan IC driver motor L293D
Untuk led 1 dan led 2 berfungsi sebagai indikator untuk penerimaan data
dari modul master. Dengan menggunakan persamaan 2.5, dapat dihitung nilai
resistor minimum yang digunakan. Besar catudaya adalah 5 volt dan nilai
tegangan untuk led yaitu 2 volt.
Ω = − = 150 20 2 5 min mA volt volt R
Nilai resistor minimum adalah 150Ω. Nilai resistor yang digunakan adalah
330Ω (lebih besar dari 150Ω dan tersedia di pasaran). Untuk menghitung arus
yang terpakai oleh led, digunakan persamaan 2.4. Beda nilai catudaya dengan
tegangan led adalah 3 volt. Nilai resistor minimal diganti nilai resistor yang
telah dipilih yaitu 330Ω. Jadi nilai arus yang melalui led adalah 9,09 mA.
I Vled V
Rmin= −
Ketika modul slave menerima perintah maju atau belok kanan, maka led 1
akan on dan led 2 akan off. Ketika modul slave menerima perintah mundur atau
belok kiri, maka led 1 akan off dan led 2 akan on. Jika data yang diterima stop,
maka led 1 dan led 2 akan on. Keadaan led 1 dan led 2 saat menerima perintah
dari modul master ditunjukkan pada tabel 3.3.
Untuk power supply kedua motor berasal dari VS pada IC L293D yaitu
sebesar 9 volt. Sedangkan VSS merupakan logic supply voltage untuk
menghidupkan IC driver motor L293D dan besarnya yaitu 5 volt.
Tabel 3.3. Keadaan led 1 dan led 2 saat menerima perintah dari modul master
No. Terima Perintah Led 1 Led 2
1. Maju atau belok
kanan
on off
2. Mundur atau Belok
kiri
off on
3. Data stop on on
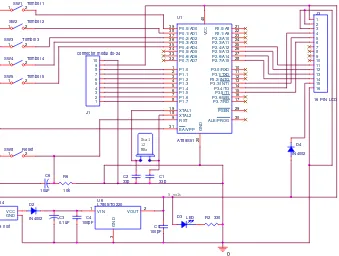
3.3.5 Rangkaian Lengkap Perancangan Perangkat Keras
Pada gambar 3.8 merupakan rangkaian lengkap untuk perancangan
perangkat keras modul master. Sedangkan rangkaian lengkap untuk
perancangan perangkat keras modul slave ditunjukkan pada gambar 3.9.
Masing-masing rangkaian dilengkapi dengan IC regulator 5 volt (L7805CV).
Nilai kapasitor 0,1uF dan 100pF pada IC regulator tersebut digunakan untuk
mengurangi noise dari sumber daya.
3.4 Perancangan Perangkat Lunak
Perangkat lunak yang dirancang terdiri dari 2 buah yaitu perangkat lunak
untuk modul master dan perangkat lunak untuk modul slave. Pada perangkat
lunak modul master berfungsi untuk mengolah masukan input dari 5 buah
tombol, menampilkan output di LCD dan mengirimkan data sesuai yang
diperintahkan ke modul slave melalui modul pemancar dx-24. Sedangkan
perangkat lunak modul slave berfungsi untuk mengolah penerimaan perintah
dari pemancar dan output-nya berupa pengendalian 2 motor DC melalui IC
0
SW5 Tombol 5
1 2
SW4 Tombol 4
1 2
SW3 Tombol 3
1 2
SW2 Tombol 2
1 2
SW1 Tombol 1
1 2 U1 AT89S51 9 18 19 20 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA/VPP VC C P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 SW8 Reset 1 2 C4 100pF C3 0.1uF U6 L7805/TO220 1 3 2 VIN GN D VOUT D2 IN4002 C5 100pF J1
connector modul dx-24
1 2 3 4 5 6 7 8 9 10
D3 LED R2 330
J3
16 PIN LCD
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 D4 1N4002 C6 10uF R6 10k C1 33p C2 33p J4
9 v olt
GND VCC Xtal 12 MHz 5 volt
Gambar 3.8. Rangkaian lengkap perancangan perangkat keras modul master
0 U2 L7805/TO220 1 3 2 VIN GN D VOUT D1 1N4002 C1 0.1uF C2 100pF U1 AT89S51 9 18 19 20 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA/VPP VC C P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 C3 100pF D2 LED R1 330
MOTOR DC 1
1
2
MOTOR DC 2
1
2
J1 9 v olt
GND VCC C4 10uF R2 10k C7 1000uF C5 33pF C6 33pF D11 LED D12 LED R3 330 R4 330 J2
Connector Modul DX24i
1 2 3 4 5 6 7 8 9 10 SW2 Reset 1 2 U4 L293D 2 7 10 15 1 9 3 6 11 14 16 8
4 5 13 12
1A 2A 3A 4A 1,2EN 3,4EN 1Y 2Y 3Y 4Y VC C 1 VC C 2 GN D GN D GN D GN D D3 1N4002 D4 1N4002 D5 1N4002 D6 1N4002 D7 1N4002 D8 1N4002 D10 1N4002 D9 1N4002 J4 9 v olt
VS GND
Xtal 12 MHz
Gambar 3.9. Rangkaian lengkap perancangan perangkat keras modul slave
3.4.1 Kerangka Utama Program Modul Master
Pada gambar 3.10 merupakan kerangka utama program modul master.
Mula-mula dilakukan subrutin inisialisasi Transceiver 2,4 GHz dan LCD M1632.
Kemudian ditampilkan petunjuk awal untuk memilih pada menu utama ini.
Menu utama di modul master ini terdiri dari pilihan play, pilihan speed dan
di LCD serta tombol 5 berfungsi untuk oke (setuju) atas pilihan yang
ditampilkan di LCD. Khusus untuk pilihan speed, digunakan tombol 3 dan 4
untuk mengatur pilihan kecepatan (speed). Keadaan speed ada tiga yaitu slow,
medium dan fast. Pada menu pilihan play terdiri dari pengiriman perintah maju,
perintah mundur, perintah belok kanan, perintah belok kiri dan perintah stop
kemudian keluar dari menu pilihan play. Untuk menu yang terakhir yaitu pilihan
help yang akan menampilkan fungsi masing-masing tombol di LCD. Setelah
subrutin play atau subrutin help selesai dijalankan, program akan kembali
menjalankan dari tampilan awal LCD.
Tampilan awal LCD
Tekan tombol1,2,atau
5? Tampilan Play
Subrutin Play
Subrutin Help
Tampilan Help
Tekan tombol1,2 atau 5? B A Tekan tombol 1 atau
2? Tekan tombol 3 atau 4? Subrutin tampilan speed Tekan tombol 5? A A
Data_speed = Data_speed + 1
Data_speed = Data_speed - 1
B A C C 5 1 2 1 2 Tidak 1 atau 2 3 4 Tidak 3 atau 4 Ya Tidak 2 1 5
Inisialisasi DX-24 dan LCD Mulai
Diagram alir subrutin pengecekan tampilan LCD untuk pilihan speed
ditunjukkan pada gambar 3.11. Untuk subrutin pengecekan tampilan pilihan
speed ini, program akan mengecek data slow, medium dan fast. Jika tidak ada
yang cocok, maka program menganggap pilihan speed-nya adalah fast. Jika data
yang dibandingkan cocok, maka datanya akan disimpan oleh program dan
pilihan kecepatannya akan ditampilkan di LCD. Kemudian subrutin ini selesai.
Untuk data speed dan data perintah pergerakan ditunjukkan pada tabel 3.4 dan
tabel 3.5.
Mulai
Data Slow? Simpan Data slow Tampilkan di
LCD
Data Fast? Simpan Data Fast Tampilkan di
LCD Data Medium? Simpan Data Medium Tampilkan di
LCD Selesai C Ya Tidak Ya Ya Ya Tidak Tidak C Tidak Data Slow?
Gambar 3.11. Diagram alir subrutin pengecekan tampilan pilihan speed
Tabel 3.4. Data untuk pilihan kecepatan (speed)
BIT KE-3 BIT KE-2 SPEED
0 1 Slow
1 0 Medium
1 1 Fast
Tabel 3.5. Data untuk perintah pada model kapal
BIT KE-1 BIT KE-0 (LSB) PERINTAH
0 0 Maju
0 1 Mundur
1 0 Belok Kanan
3.4.2 Subrutin Play untuk Modul Master
Gambar 3.12 merupakan diagram alir dari subrutin play untuk modul
master. Mula-m