TUGAS AKHIR
PENGENDALI FAKTOR DAYA BEBAN INDUKTIF
BERBASIS MIKROKONTROLER ATMEGA32
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh :
Markus Indrayana
NIM : 045114029
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
Inductive Load Power Factor Controller
Based On ATmega32 Microcontroller
FINAL PROJECT
In partial fullfilment of the requirements
For the degree of Sarjana Teknik
Electrical Engineering Study Program
Electrical Engineering Department
Science and Technology Faculty Sanata Dharma University
By :
MARKUS INDRAYANA
NIM : 045114029
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
vi
HALAMAN PERSEMBAHAN DAN MOTTO
Kupersembahkan karya tulis ini kepada :
•
ALLAH TRI-TUNGGAL
•
KEDUA ORANG TUA-KU
•
KEEMPAT SAUDARA SAUDARIKU
•
TEMAN – TEMAN ELEKTRO (SEMUA ANGKATAN)
•
RAKYAT INDONESIA
MOTTO :
viii
INTISARI
Beban induktif yang terhubung dengan instalasi listrik dapat menyebabkan penurunan faktor daya. Penurunan faktor daya akan menurunkan efisiensi penggunaan daya. Efisiensi penggunaan daya yang rendah dapat ditingkatkan. Peningkatan efisiensi penggunaan daya ini dapat dilakukan dengan meningkatkan nilai faktor daya sehingga mendekati satu. Cara peningkatan nilai faktor daya yaitu dengan mengurangi daya reaktif induktif. Pengurangan daya reaktif induktif ini dapat dilakukan dengan menghubungkan secara paralel kapasitor pada beban. Daya reaktif kapasitif yang diserap oleh kapasitor akan mengurangi daya reaktif total. Berkurangnya daya reaktif total akan memperkecil daya nyata yang digunakan, sehingga faktor daya meningkat. Dalam penelitian ini peningkatan faktor daya beban induktif dilakukan dengan cara penambahan kapasitor terkendali.
Penambahan kapasitor terkendali dilakukan dengan menambahkan sejumlah kapasitor. Jumlah kapasitor yang diperlukan dihitung oleh mikrokontroler ATmega32. Banyaknya jumlah kapasitor yang ditambahkan ditentukan oleh hasil deteksi informasi daya. Informasi daya yang dibutuhkan adalah nilai tegangan; nilai arus; faktor daya; daya nyata; daya rerata dan daya kuadratur. Nilai tegangan dan arus diperoleh dengan
men-sampling nilai tegangan dan arus menggunakan ADC internal mikrokontroler ATmega32 dan penyearah presisi. Sedangkan nilai faktor daya dihitung berdasar hasil deteksi jeda waktu sinyal tegangan dan arus. Jeda waktu tersebut dicatat berdasar hasil cacahan pewaktu 16 bit mikrokontroler.
Dari hasil – hasil pengujian didapatkan fakta bahwa pengendali faktor daya dapat mendeteksi informasi daya untuk proses pengendalian faktor daya. Dalam hasil – hasil pengujian deteksi informasi daya didapatkan jangkauan deteksi arus antara 0,203 Arms
sampai 5,32 Arms dengan nilai rerata error 4,867%; jangkauan deteksi tegangan antara
8,99 Vrms sampai 233,8 Vrms dengan nilai rerata error 2,343%; jangkauan deteksi daya
nyata antara 10,34 VA sampai 1170,4 VA dengan nilai rerata error 7,208%. Perbandingan deteksi faktor daya pengendali faktor daya dengan hasil pengukuran faktor daya menggunakan tang ampere MX200 menghasilkan rerata error sebesar 7,91% dan
error maksimal sebesar 17,14%. Dalam pengujian pengendalian faktor daya pengendali faktor daya dapat mengendalikan nilai faktor daya sehingga nilai faktor daya mendekati satu.
ix
ABSTRACT
The inductive load that connected to the electric line may cause power factor degradation. Power factor degradation makes power consumption efficiency lower. Low power consumption efficiency could be improved. Power consumption efficiency improvement could be done with power factor improvement so that come near one. Power factor improvement method is reduces inductive reactive power. Inductive reactive power reduction could be done with connecting parallel capacitor in to the load. Capacitive reactive power that absorbed by capacitor will reduce used total inductive reactive power. The total reactive power reduction will reduces used apparent power, so power factor will be increase. In this research inductive load power factor improvement is done with controlled capacitor addition.
Controlled capacitor addition is done with adding the amount of capacitors. The amount of capacitor needed is calculated by ATmega32 microcontroller. The added capacitor amount will determined by power information detection result. Needed power information are; voltage value; current value; power factor; apparent power; real power; and reactive power. Voltage and current value were got by sampling the voltage and current value using internal ADC of ATmega32 and precision rectifier. Then power factor value is calculated based on voltage signal and current signal delay detection result. Delay time recorded based on microcontroller’s 16 bit timer counting result.
From results of the test were got facts that power factor controller could detect power information for power factor control process. In the results of the power information detection test were got current detection range between 0,203 Arms to 5,32
Arms with average error value 4,867%; voltage detection range between 8,99 Vrms to 233,8
Arms with average error value 2,343 %; apparent power detection range between 10,344
VA to 1170 VA with average error value 7,208%. Comparison between power factor controller’s power factor detection with power factor measurement results using clamp on meter MX200 resulting 7,91% average error value and 17,14% maximum error value. In the power factor control test power factor controller could control power factor value so that come near one.
x
KATA PENGANTAR
Puji syukur saya panjatkan kepada Allah Bapa, Putera dan Roh Kudus, oleh karena berkat-Nya penulis dapat menyelesaikan tugas akhir ini dengan baik.
Dalam penyelesaian tugas akhir ini penulis sungguh menyadari bahwa begitu banyak pihak yang telah membantu dengan cara mereka masing – masing, bahkan ketika saya meragukan tugas akhir ini akan terselesaikan. Oleh sebab itu penulis mengucapkan banyak terima kasih kepada :
1. Kedua orang tuaku yang telah mendukung saya dengan penuh kasih dalam tugas akhir ini.
2. Martanto, S.T., M.T. selaku pembimbing I yang telah dengan sabar membimbing saya dalam penyelesaian tugas akhir ini.
3. Bernadeta Wuri Harini, S.T., M.T. selaku Ketua Jurusan Tenik Elektro sekaligus sebagai pembimbing II yang berusaha meluangkan waktu untuk memberikan bimbingan yang sangat berharga.
4. Yosef Agung Cahyanta, S.T., M.T. selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma.
5. Seluruh dosen Jurusan Teknik Elektor Universitas Sanata Dharma.
6. Seluruh laboran Jurusan Teknik Elektor Universitas Sanata Dharma yang dengan sabar dan baik hati memberikan dukungan yang amat penting.
7. Kawan – kawan Jurusan Teknik Elektro yang selalu memberikan semangat dan inspirasi.
xi
9. Semua kawan forum AVR GCC dalam situs http://www.avrfreaks.net, yang telah memberikan contoh source code dan masukan – masukannya.
10. Banyak pihak yang tak mungkin saya sebutkan satu – persatu, yang telah mendukung saya secara langsung maupun tidak.
Dengan rendah penulis sangat menyadari bahwa alat dan karya tulis yang dibuat ini penuh dengan kekurangan dan cacat. Oleh sebab itu penulis mengharapkan kritik dan saran yang membangun kepada setiap pembaca. Akhir kata, semoga tugas akhir ini berguna bagi seluruh Rakyat Indonesia tercinta ini.
Yogyakarta, 31 Januari 2010
xii
DAFTAR ISI
Halaman
JUDUL... i
HALAMAN PERSETUJUAN OLEH PEMBIMBING...iii
HALAMAN PENGESAHAN OLEH PENGUJI... iv
HALAMAN PERNYATAAN KEASLIAN KARYA...v
HALAMAN PERSEMBAHAN DAN MOTTO... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS... vii
INTISARI...viii
ABSTRACT... ix
KATA PENGANTAR...x
DAFTAR ISI... xii
DAFTAR GAMBAR...xviii
DAFTAR TABEL...xxiii
DAFTAR LAMPIRAN...xxv
BAB I. PENDAHULUAN 1.1. Latar Belakang Masalah ...1
1.2. Tujuan dan Manfaat...3
1.3. Batasan Masalah ...3
1.4. Metodologi Penelitian...4
xiii
BAB II. DASAR TEORI
2.1. Tegangan dan Arus Sinusoida ...7
2.1.1. Nilai Sesaat ...7
2.1.2. Harga Efektif...8
2.2. Daya dalam Keadaan Tunak Sinusoida ...8
2.2.1. Daya Rerata...9
2.2.2. Daya Reaktif ...10
2.2.3. Faktor Daya...10
2.2.4. Segitiga Daya Kompleks...10
2.2.5. Jaringan yang Terhubung Paralel...11
2.3. Perbaikan Faktor Daya ...12
2.4. Resistor Terhubung Seri ...15
2.5. Transformator ...16
2.5.1. Transformator Arus...17
2.5.1.1.Effek Pemasangan Rt...18
2.6. Penguat Operasional Sabagai Pembanding Tak Membalik...19
2.7. Penguat Operasional Sebagai Penyearah Presisi dengan Penguatan...20
2.8. Optoisolator ...20
2.9. Mikrokontroler ATmega32...22
2.9.1. Penempatan Pin...22
2.9.1.1.Fungsi Alternatif Port – port I/O...22
1.9.1.1.1. Port A ...22
1.9.1.1.2. Port B ...23
1.9.1.1.3. Port C ...24
xiv
2.9.2. Peta Memori...25
2.9.2.1.Memori Flash yang Dapat Diprogram Secara ISP ...25
2.9.2.2.Memori Data SRAM...26
2.9.2.3.Memori Data EEPROM...27
2.9.2.4.Register I/O...29
2.9.3. Alamat Vector...29
2.9.4. Register CPU ...30
2.9.5. Register untuk Port I/O ...32
2.9.6. Analog Comparator...35
2.9.7. Analog to Digital Converter (ADC) ...37
2.9.8. Timer/Counter1...39
2.10.Modul LCD LMB162A ...44
2.10.1. Pin – pin Modul LCD ...44
2.10.2. Register Instruksi (IR) dan Register Data (DR)...45
2.10.3. Display Data RAM (DDRAM)...45
2.10.4. Code Generator ROM (CGROM)...46
2.10.5. Code Generator RAM (CGRAM)...46
2.11. Analisa Statistik ...46
2.11.1. Analisa Statistika Sederhana...46
2.11.2. Regresi Linear...47
2.11.2.1.Kriteria Kecocokan “Terbaik” (Best Fit)...48
2.11.2.2.Kecocokan Kuadrat Terkecil Garis Lurus ...48
2.11.2.3.Pengukuran Galat Regresi Linear ...49
xv
3.2. Perancangan Perangkat Keras...52
3.2.1. Sensor Arus...52
3.2.2. Perancangan Penyearah Presisi dengan Penguatan Untuk Transfor- mator Arus ...55
3.2.3. Pemilihan Transformator Tegangan ...56
3.2.4. Perancangan Penyearah Presisi dengan Penguatan Pada Transfor- mator Tegangan ...57
3.2.5. Perancangan Zerocrossing Detector...58
3.2.6. Perancangan Bank Kapasitor ...58
3.2.7. Perancangan Antarmuka Mikrokontroler ...61
3.2.7.1.Antarmuka Penyearah Presisi dengan ADC Internal Mikrokontroler ATmega32 dan Zero Crossing Detector dengan Mikrokontroler ATmega 32...62
3.2.7.2.Antarmuka Mikrokontroler ATmega32 dengan Penampil LCD ...63
3.2.7.3.Antarmuka Mikrokontroler ATmega32 dengan Tombol – tombol kendali ...64
3.2.7.4.Antar Muka Mikrokontroler ATmega32 dengan Penggerak Bank Kapasitor...64
3.3. Perancangan Program ...65
3.3.1. Diagram Alir Program Utama...65
3.3.2. Inisialisasi LCD ...66
3.3.3. Subrutin “cari_vrms” ...66
3.3.4. Subrutin “cari_irms” ...67
3.3.5. Subrutin “sampling”...68
xvi
3.3.7. Subrutin “cari_thetha” ...70
3.3.8. Subrutin “_tombol”...73
3.3.9. Subrutin “tampil” ...74
3.3.10. Proses “kendalikan_pf”...75
3.3.11. Proses Pemformatan Data Jumlah Kapasitor...77
3.4. Metodologi Pengujian Kinerja Pengendali Faktor Daya ...78
BAB IV. HASIL DAN PEMBAHASAN 4.1. Hasil Pengujian Deteksi Informasi Daya...79
4.1.1. Hasil Pengujian Deteksi Arus(rms) ...79
4.1.2. Hasil Pengujian Deteksi Tegangan (rms) ...81
4.1.3. Hasil Pengujian Deteksi Daya Nyata...83
4.1.4. Hasil Pengujian Deteksi Faktor Daya ...85
4.2. Pengujian Unjuk Kerja Pengendali Faktor Daya...89
4.3. Hasil Perancangan Perangkat Keras Alat ...102
4.4. Analisa Perangkat Lunak...105
4.4.1. Inisialisasi Program...106
4.4.2. Fungsi Penanganan Tombol Kendali (“_tombol()”)...106
4.4.3. Fungsi “_tampil()” ...107
4.4.4. Fungsi “sampling()”...111
4.4.5. Fungsi “cari_vrms()” ...112
4.4.6. Fungsi “cari_irms()” ...112
4.4.7. Fungsi “catat_waktu()” ...113
4.4.8. Fungsi “cari_thetha()”...114
4.4.9. Fungsi Penanganan Sela Pembanding Analog...115
xvii
4.4.11. Fungsi Penanganan Sela Over Flow...116
4.4.12. Program Utama ...116
4.5. Pengujian Perangkat Keras ...118
4.5.1. Bagian Sensor Arus – Zerocrosing Detector – Gerbang Logika Or ...119
4.5.1.1.Perbandingan Gelombang Arus Beban dengan Gelombang Keluaran Sensor Arus...119
4.5.1.2.Perbandingan Sinyal Arus Beban dengan Sinyal Keluaran Zerocrossing Detector...121
4.5.1.3.Perbandingan Keluaran Gerbang Logika Or dengan Keluaran Sensor Arus...122
4.5.2. Bagian Sensor Tegangan – Zerocrosing Detector – Gerbang Logika Or...124
a) Perbandingan Keluaran Zerocrosing Detector dengan Keluaran Sensor Tegangan...124
b) Perbandingan Keluaran Gerbang Logika Or dengan Keluaran Sensor Tegangan...125
4.5.3. Bagian Sensor Arus– Penyearah Presisi dengan Penguatan ...126
4.5.4. Bagian Sensor Tegangan – Penyearah Presisi dengan Penguatan ...128
BAB V. PENUTUP 5.1. Kesimpulan ...130
5.2. Saran ...131
DAFTAR PUSTAKA
xviii
DAFTAR GAMBAR
Halaman
Gambar 2.1. Sinyal Sinusoida...7
Gambar 2.2. Segitiga Daya Untuk Beban Induktif ...11
Gambar 2.3. Segitiga Daya Untuk Beban Kapasitif ...11
Gambar 2.4. Rangkaian Beban Listrik...12
Gambar 2.5. Pemasangan Kapasitor Pada Perbaikan Faktor Daya ...13
Gambar 2.6. Perubahan Segitiga Daya pada Perbaikan Faktor Faya ...13
Gambar 2.7. Resistor Terhubung Seri...15
Gambar 2.8. Transformator Ideal dengan Beban...16
Gambar 2.9. Transformator Arus...17
Gambar 2.10. Transformator Arus dengan Resistor Burden...17
Gambar 2.11. Gambar Rangkaian Ekuivalen Transformator dengan Beban Pendekatan Skunder Dibawa ke Primer ...18
Gambar 2.13. Penguat Operasional Sebagai Pembanding Tak Membalik ...19
Gambar 2.14. Penguat operasional Penyearah Presisi Gelombang Penuh ...20
Gambar 2.15. Optoisolator Dalam Kemasan IC ...21
Gambar 2.16. Konfigurasi Dasar Optoisolator ...21
Gambar 2.17. Penempatan Pin Mikrokontroler ATmega32 ...22
Gambar 2.18. Peta Memori Progam ...26
Gambar 2.19. Peta Memori SRAM...26
Gambar 2.20. Eeprom Address Register...27
Gambar 2.21. EEPROM Data Register – EEDR ...27
xix
Gambar 2.23. SREG ...30
Gambar 2.24. Register X, Y, dan Z ...32
Gambar 2.25. Stack Pointer ...32
Gambar 2.26. Blok Diagram AnalogComparator...35
Gambar 2.27. Special Function Input / Output Register...36
Gambar 2.28. Analog Comparator Control and Status Register...36
Gambar 2.29. Blok Diagram ADC Internal ...38
Gambar 2.30. ADMUX...38
Gambar 2.31. ADCSRA ...39
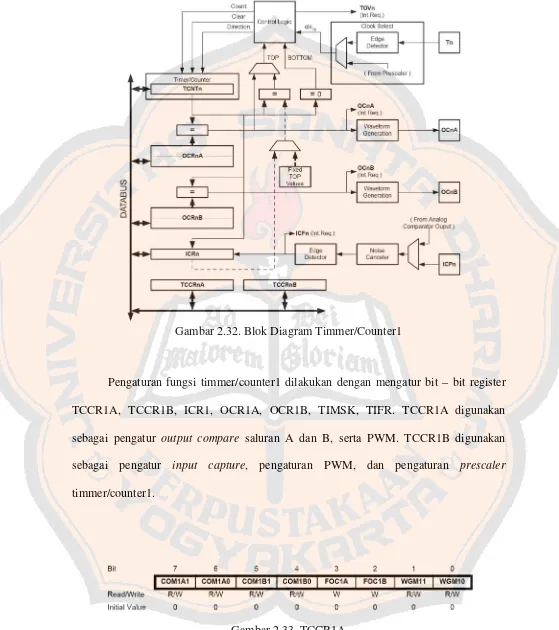
Gambar 2.32. Blok Diagram Timmer/Counter1 ...40
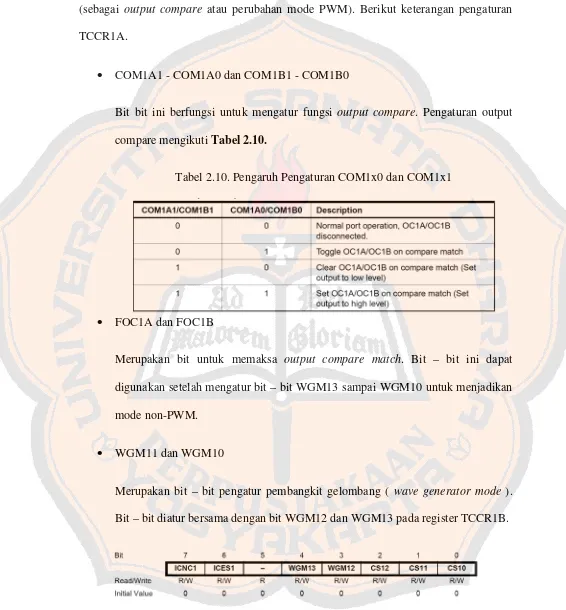
Gambar 2.33. TCCR1A ...40
Gambar 2.34. TCCR1B...41
Gambar 2.35. TIMSK ...43
Gambar 2.36. TIFR ...43
Gambar 2.37.(a) Modul LCD LMB162A (Tampak Depan)...44
Gambar 2.37.(b) Modul LCD LMB162A (Tampak Belakang)...44
Gambar 3.1. Blok Diagram Pengendali Faktor Daya ...50
Gambar 3.2. Pemasangan Transformator Arus...53
Gambar 3.3. Penyearah presisi dengan penguatan...56
Gambar 3.4. Penyearah Presisi dengan Penguatan ...58
Gambar 3.5. Rangkaian Zero Crossing Detector...58
Gambar 3.6. Bank Kapasitor...61
Gambar 3.7. Antarmuka Penyearah Presisi dan Zero Crossing Detector dengan Mikrokontroler ATmega32...63
xx
Gambar 3.9. Antarmuka Mikrokontroler ATmega32 dengan Tombol Kendali ...64
Gambar 3.10. (a) Antarmuka mikrokontroler ATmega32 dengan bank kapasitor Mikrokontroler dipisahkan Secara Optis ...65
Gambar 3.10. (b) Antarmuka Mikrokontroler ATmega32 dengan Bank Kapasitor, Lanjutan Antarmuka Mikrokontroler ATmega32 dengan Bank Kapasitor ...65
Gambar 3.11. Garis Besar Diagram AlirProgram...66
Gambar 3.12. Sinyal dan Hasil Konversi ADC pada Deteksi Nilai Tegangan...67
Gambar 3.13. Sub Rutin “cari_vrms” ...67
Gambar 3.14. Sinyal dan Hasil Konversi ADC pada Deteksi Nilai Arus...68
Gambar 3.16. Subrutin “sampling”...69
Gambar 3.17. Surutin “Catat_waktu” ...70
Gambar 3.18. Hubungan Hasil Cacahan Pewaktu dengan Sudut, Letak Kuadran dan Sifat Impedansi ...72
Gambar 3.19. Diagram Alir Subrutin “cari_thetha” ...73
Gambar 3.20. Proses Untuk Memilih Mode ...74
Gambar 3.21. Subrutin “tampil” ...75
Gambar 3.22. Subrutin “kendalikan_pf” ...76
Gambar 3.23. Proses Pemformatan Data Jumlah Kapasitor ...77
Gambar 3.24. Proses “tunda_1_detik”...78
Gambar 4.1.Grafik Hasil Pengujian Deteksi Arus...81
Gambar 4.2.Grafik Error Deteksi Arus Alat ...81
Gambar 4.3. Grafik Perbandingan Hasil Ukur Acuan dengan Deteksi Alat ...83
Gambar 4.4.Grafik Error Deteksi Tegangan ...83
xxi
Gambar 4.6. Grafik Error Deteksi Daya Nyata dibandingkan dengan Hasil Kali
Hasil Pengukuran Tegangan dan Arus Menggunakan Alat Ukur Acuan ...85
Gambar 4.7. Grafik Error Deteksi Faktor Daya Mode Non-Aktif dalam Persen...87
Gambar 4.8. Grafik Error Deteksi Faktor Daya Mode Aktif dalam Persen...87
Gambar 4.9. Grafik Tiga Dimensi Hasil Pengendalian faktor Daya ...95
Gambar 4.10. Grafik tiga dimensi hasil pengendalian faktor daya teoritis ...100
Gambar 4.11. Grafik Perbandingan Peningkatan Faktor Daya...101
Gambar 4.12. Pengendali Faktor Daya ...103
Gambar 4.13. Panel Depan Pengendali Faktor Daya...103
Gambar 4.14. Penampil dan Cara Penampilan Informasi Daya Secara Umum...104
Gambar 4.15. (a) Penampilan Informasi Daya (Daya Nyata, Daya Rerata, dan Mode Kendali)...104
Gambar 4.15. (b) Penampilan Informasi Daya (Daya Nyata, Faktor Daya, dan Mode Kendali)...104
Gambar 4.15. (c) Penampilan Informasi Daya (Faktor Daya dan Mode Kendali) ...104
Gambar 4.15. (d) Penampilan Informasi Daya (Nilai Tegangan dan Arus) ...104
Gambar 4.15. (e) Penampilan Informasi Daya (Jumlah Kapasitor Terpasang, Daya Kuadratur dan Mode Kendali) ...104
Gambar 4.16. Bagian dalam Bank Kapasitor...105
Gambar 4.17. Skema Pengujian Sensor Arus ...119
Gambar 4.18. Gelombang Sinyal Arus Beban Dibandingkan dengan Gelombang Sinyal Keluaran Sensor Arus (lima mili detik /div)...120
xxii
Gambar 4.20. Perbandingan Sinyal Arus Beban dengan Sinyal Keluaran Zerocrossing
Detector (2,5 mili detik/div) ...121 Gambar 4.21. Perbandingan Sinyal Arus Beban dengan Sinyal Keluaran Zerocrossing Detector (satu mili detik/div)...122 Gambar 4.22. Beda Waktu Antara Sinyal Arus Beban dengan Sinyal Zerocrosing
Detector...123 Gambar 4.23. Deteksi pemotongan garis nol volt sinyal arus beban lebih dari satu kali dalam satu siklus sinyal arus beban ...124 Gambar 4.24. Jeda Waktu Antara Sinyal Tegangan Jala – jala dan Zerocrosing
Detector...125 Gambar 4.25. Jeda Waktu Antara Sinyal Tegangan Beban dengan Keluaran Gerbang logika OR ...126 Gambar 4.26. Gelombang Keluaran Sensor Arus Dibandingkan dengan Keluaran
xxiii
DAFTAR TABEL
Halaman Tabel 2.1. Fungsi Alternatif Port A ...23 Tabel 2.2. Fungsi Alternatif Port B...24 Tabel 2.3. Fungsi Alternatif Port C...24 Tabel 2.4. Fungsi Alternatif Port D ...25 Tabel 2.5. Alamat Vektor ATmega32...29 Tabel 2.6 Efek Nilai DDx dan Pin x ...33 Tabel 2.7. SFIOR ...34 Tabel 2.8. Sumber – sumber Pemicu ADC...34 Tabel 2.9 Pengaturan ACIS1 dan ACIS0 ...35 Tabel 2.10. Pengaruh Pengaturan COM1x0 dan COM1x1 ...41 Tabel 2.11. Daftar Clock Pewaktu/Pencacah0...42 Tabel 2.12. Simbol dan Nama Pin ...45 Tabel 2.13. Alamat Posisi Karakter ...46 Tabel 3.1 Konfigurasi Jumlah Kapasitor Terbobot Bank Kapasitor...61 Tabel 4.1. Perbandingan Hasil Deteksi Arus dengan Alat Ukur Acuan (Digital
Multimeter Sanwa PC510)...80 Tabel 4.2. Tabel Perbandingan Hasil Deteksi Tegangan dengan Multimeter Digital Sanwa PC510 ...82 Tabel 4.3. Data Perbandingan Antara Deteksi Daya Nyata pada Alat dengan Hasil
xxiv
Tabel 4.6. Perbandingan Hasil Deteksi Faktor Daya Mode Non-Aktif dengan Mode Aktif ...88 Tabel 4.6. Perbandingan Hasil Deteksi Faktor Daya Mode Non-Aktif dengan Mode Aktif ...88 Tabel 4.7. Perbandingan Hasil Deteksi Faktor Daya pada Alat dengan Alat Ukur Tang Ampere Metrix MX200 ...89 Tabel 4.8. Data Unjuk Kerja Pengendali Faktor Daya dengan Variasi Beban mode
Non-Aktif...90 Tabel 4.9. Data Unjuk Kerja Pengendali Faktor Daya dengan Variasi Beban Mode Aktif ...91 Tabel 4.10. Data Unjuk Kerja Pengendali Faktor Daya dengan Variasi Beban Mode Aktif (Perubahan Informasi Daya)...92 Tabel 4.11. Unjuk Kerja Pengendali Faktor Daya dengan Variasi Kondisi Beban...93 Tabel 4.12. Hasil Perhitungan Teoritis Perbaikan Faktor Daya Variasi Beban
(non-aktif) ...96 Tabel 4.13. Hasil Perhitungan Teoritis Perbaikan Faktor Daya Variasi Beban
Mode-Aktif ...97 Tabel 4.14. Hasil Perhitungan Teoritis Perbaikan Faktor Daya Variasi Beban
Mode-aktif (Perubahan nilai faktor daya)...98 Tabel 4.15. Hasil Perbaikan Faktor Daya Teoritis dengan Pengubahan Kondisi
xxv
DAFTAR LAMPIRAN
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Beban instalasi listrik dapat bersifat resistif, induktif, kapasitif maupun merupakan kombinasi dari ketiga sifat tersebut. Namun pada umumnya beban instalasi listrik bersifat resistif – induktif [1]. Sebagai contoh umum beban antara lain motor listrik (pompa air, kipas angin, lemari es, dan penyejuk udara), transformator (regulator tegangan, balast
lampu fluoresent, dan catu daya peralatan elektronik). Faktor daya resistif – induktif menyababkan daya yang diserap beban tidak hanya daya rerata (true power) P namun juga daya reaktif (reactive power) Q. Daya nyata (apparent power) S tidak hanya terdiri dari daya rerata P, tetapi daya nyata terdiri dari daya rerata P dan daya reaktif Q.
Daya rerata P digunakan untuk membangkitkan cahaya, gerak atau torsi, panas dan lain – lain dalam penggunaan daya listrik. Sedangkan daya reaktif Q digunakan umtuk membangkitkan medan magnet (fluks magnetik) [2]. Pada sisi lain, perusahaan listrik (PLN) menyediakan daya berupa daya nyata S yang terbatas, hal ini ditandai dengan pembatasan arus listrik yang pada MCB [3]. Faktor daya adalah perbandingan antara daya rerata dan daya nyata [5]. Besarnya faktor daya merupakan tingkat efisiensi penggunaan daya yang disediakan. Semakin kecil faktor daya maka semakin kecil pula efisiensi penggunaan daya yang terjadi.
Banyaknya beban terhubung dengan instalasi listrik yang berkembang dinamis (sesuai kebutuhan pengguna) menyebabkan perubahan faktor daya. Bertambahnya daya reaktif total beban akan cenderung memperkecil faktor daya sehingga memperburuk
efisiensi pemggunaan daya. Untuk faktor daya turun dari 1,0 ke 0,9 saja menyebabkan peningkatan arus 15% dari yang dibutuhkan untuk beban yang sama [6].
Efisiensi daya instalasi listrik yang buruk dapat diperbaiki. Perbaikan efisiensi ini dapat dilakukan dengan meningkatkan faktor daya, yaitu dengan mengurangi daya reaktif induktif. Pengurangan daya reaktif induktif ini dapat dilakukan dengan menambahkan kapasitor pada beban, daya reaktif kapasitif (berlawanan dengan daya reaktif induktif) yang diserap oleh kapasitor akan mengurangi daya reaktif total. Berkurangnya daya reaktif total akan memperkecil daya nyata yang digunakan, sehingga faktor daya meningkat.
Pada prakteknya masyarakat biasanya berusaha membuat daya yang digunakan lebih efisien dengan menghubungkan kapasitor secara paralel dengan beban tertentu saja dengan harapan dapat meningkatkan faktor daya beban sehingga meningkatkan efisiensi daya instalasi listrik (plant sistem tiga fasa perbaikan faktor daya dapat menghemat tagihan biaya listrik karena sistem penagihan dihitung dalam kVAh [6]). Cara ini sangat berguna apabila dilakukan dalam instalasi rumah tinggal yang biasanya memiliki ukuran yang kecil. Namun apabila instalasi listrik berukuran besar dan beban berkembang dinamis menurut kebutuhan, cara ini tidak praktis. Karena setiap beban terhubung minimal dengan satu kapasitor, sehingga akan membutuhkan banyak kapasitor di setiap beban. Padahal kapasitor tidak seluruhnya digunakan pada saat itu juga, karena beban tidak selalu aktif dan kapasitor terpasang secara permanen.
mungkin. Alat ini meningkatkan faktor daya dengan menghubungkan kapasitor paralel yang diperlukan ke dalam instalasi listrik secara dinamis sesuai kebutuhan saat itu juga.
1.2. Tujuan dan Manfaat
Penelitian ini memiliki tujuan yaitu menghasilkan pengendali faktor daya yang mampu meningkatkan faktor daya dan mampu memantau faktor daya dan daya nyata instalasi listrik serta menampilkannya.
Penelitian ini memberikan manfaat bagi masyarakat dan kemajuan teknologi. Manfaat – manfaat yang diberikan antara lain :
A. Meningkatkan efisiensi pemakaian daya yang disediakan perusahaan listrik (PLN). B. Menghasilkan referensi penelitian di bidang ilmu teknik tenaga listrik.
1.3. Batasan Masalah
Agar penelitian yang diajukan mempunyai arah dan batasan yang jelas maka penelitian diarahkan dengan pemberian batasan – batasan masalah yang jelas. Berikut batasan – batasan masalah yang menjadi acuan dalam pembuatan alat:
a) Pengendali faktor daya meningkatkan efisiensi pemakaian daya yang disediakan PLN dengan cara mengendalikan faktor daya beban instalasi listrik.
b) Beban instalasi listrik diasumsikan bersifat induktif.
d) Sistem instalasi satu fasa dengan daya beban maksimal satu kilo Volt Ampere (1 KVA). Asumsi tegangan jala – jala stabil pada 220 Vrms (maksimal 240 Vrms) dan
frekuensi jala – jala tetap pada 50 hertz.
e) Tegangan instalasi listrik yang digunakan diasumsikan tidak mengalami gangguan atau distirsi sinyal, sehingga gelombang sinyal listrik berbentuk fungsi sinusoida murni.
f) Perancangan pengendali faktor daya mengabaikan efek transien dan harmonisa yang ditimbulkan pada saat penambahan kapasitor [7].
g) Menggunakan LCD sebagai penampil.
h) Pengendali faktor daya dikendalikan oleh mikrokontroler ATmega32.
1.4. Metodologi Penelitian
Penelitian ini merupakan kegiatan rancang bangun alat. Agar perancangan dapat berjalan dengan baik maka diperlukan suatu studi, referensi dan masukan. Berikut merupakan metodologi penelitian yang dilakukan :
1) Studi kepustakaan yang mencakup literatur – literatur, gambar-gambar dan manual yang didapat dari perpustakaan, buku, dan internet.
2) Perancangan hardware dan software.
3) Pembuatan hardware dan software berdasar hasil perancangan.
4) Pengambilan data kinerja alat yang telah dibuat (pengujian), dengan menggunakan alat yang presisi.
5) Menganalisa hasil pengujian yang diperoleh dan membandingkannya dengan teori yang ada.
1.5. Sistematika Penulisan
Penulisan laporan penelitian mengacu pada sistematika penulisan. Berikut adalah sistematika penulisan yang digunakan :
BAB I : PENDAHULUAN
Dalam bab ini dipaparkan mengenai latar belakang masalah pengambilan judul, tujuan dan manfaat penelitian, batasan masalah, metodologi penelitian, dan sistematika penulisan.
BAB II : DASAR TEORI
Perancangan alat dalam penelitian ini mempunyai dasar teori – dasar teori yang diperlukan untuk menjadi acuan perancangan. Bab ini memuat dasar teori – dasar teori yang diperlukan.
Adapun dasar teori yang diperlukan untuk penyusunan tugas akhir antara lain dasar teori mengenai statistika sederhana, regresi linear, daya dalam domain waktu (ac), tegangan sesaat, tegangan efektif, arus sesaat, arus efektif, daya nyata, daya kuadratur, daya rerata, segutiga daya, perbaikan faktor daya, tranformator tegangan, transformator arus, zero crossing detector, penyearah presisi dengan penguatan, LCD, mikrokontroler ATmega32.
BAB III : PERANCANGAN PENELITIAN
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi hasil pengujian dan pembahasan dari pengujian yang telah dilakukan.
BAB V : KESIMPULAN DAN SARAN
BAB II
DASAR TEORI
2.1. Tegangan dan Arus Sinusoida
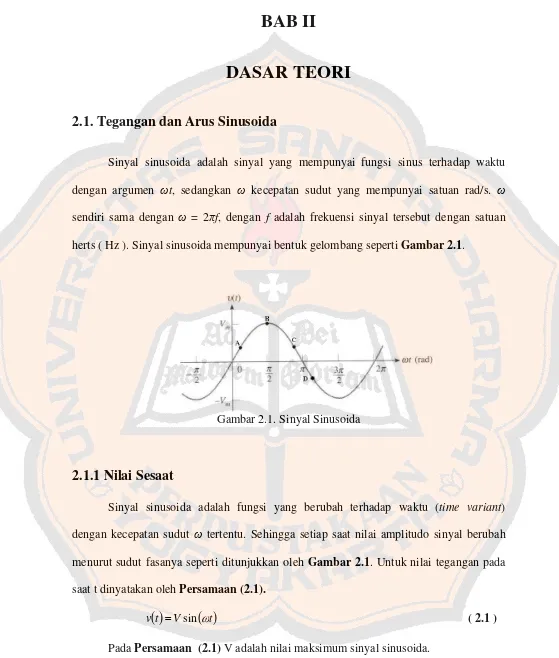
Sinyal sinusoida adalah sinyal yang mempunyai fungsi sinus terhadap waktu dengan argumen ωt, sedangkan ω kecepatan sudut yang mempunyai satuan rad/s. ω sendiri sama dengan ω = 2πf, dengan f adalah frekuensi sinyal tersebut dengan satuan herts ( Hz ). Sinyal sinusoida mempunyai bentuk gelombang seperti Gambar 2.1.
Gambar 2.1. Sinyal Sinusoida
2.1.1 Nilai Sesaat
Sinyal sinusoida adalah fungsi yang berubah terhadap waktu (time variant) dengan kecepatan sudut ω tertentu. Sehingga setiap saat nilai amplitudo sinyal berubah menurut sudut fasanya seperti ditunjukkan oleh Gambar 2.1. Untuk nilai tegangan pada saat t dinyatakan oleh Persamaan (2.1).
( )
t V( )
tv = sin ω ( 2.1 )
Pada Persamaan (2.1) V adalah nilai maksimum sinyal sinusoida.
2.1.2 Harga Efektif
Sebuah fungsi periodis f(t) dengan periode T, mempunyai nilai rata – rata (rms) yang dihitung dengan Persamaan (2.2) :
( )
∫
= T
rms F t dt
T F
0 2
1
( 2.2 )
Untuk sinyal sinusoida maka tegangan efektifnya dapat dihitung dengan Persamaam
(2.3). P rms V V 2 1
= ( 2.3 )
Apabila sinyal sinusoida terdistorsi menjadi beberapa sinyal harmonisa maka tegangan effektif sinyal tersebut merupakan rerata akar kuadrat dari jumlahan tegangan effektif kuadrat sinyal – sinyal harmonisa. Berikut Persamaan (2.4), persamaan tegangan efektif sinyal fundamental dengan n harmonisa.
2 ) ( 2 ) 2 ( 2 ) 1 ( 2 ) 0 ( 2 n rms rms rms rms dc
rms V V V V V
V = + + + +L+ ( 2.4 )
Secara diskret harga efektif (rms) dihitung dengan Persamaan(2.5)[9,10,11].
n
x
x
n i n rms∑
==
1 2( 2.5 )
Nilai xn merupakan data – data hasil pengukuran, sampling ataupun hasil
pencatatan statistik. xn dapat berupa nilai sesaat dari sebuah fungsi yang dicuplik.
2.2. Daya dalam Keadaan Tunak Sinusoida
( ) ( ) ( )
t v t itp = × ( 2.6 )
Sebuah tegangan v=VPcosωtyang diberikan kepada impedansi tertentu Z akan menimbulkan suatu arus i=IPcos
(
ωt−θ)
. Daya sesaat yang diserap pada impedansi tersebut adalah :( )
t =V ωtI(
ωt−θ)
p Pcos Pcos ( 2.7 )
(
)
(
)
(
θ ω θ)
θ ω ω − + = − = t I V t t I V P P P P 2 cos cos 2 1 cos cosKarena suku cos
(
2ωt−θ)
memiliki nilai rata – rata nol, maka daya sesaat dapat dituliskan sebagai :θ
cos 2
1 )
(t VPIP
p = ( 2.8 )
Dengan mensubstitusikan VP =VEff × 2 dan IP =IEff × 2 maka daya rerata dapat
dirumuskan sebagai θ cos Eff Eff I V
P= × ( 2.9 )
2.2.1. Daya Nyata
Daya nyata “S” ialah daya total (jumlahan dari komponen – komponen dayanya) yang diserap suatu beban (berupa suatu impedansi). Daya ini bersifat kompleks karena terdiri dari daya rerata “P” dan daya kuadratur “Q”. Kedua jenis daya tersebut berbeda sehingga tidak boleh dijumlahkan secara langsung. Daya ini dirumuskan sebagai
Eff
Eff I
V
S = × ( 2.10 )
2 2
Q P
S = + ( 2.11 )
2.2.2. Daya Reaktif
Jika sebuah impedansi terdapat komponen induktansi atau kapasitansi atau keduanya maka sebagian energi disimpan dalam komponen tersebut selama satu siklus kemudian dikembalikan lagi kepada sumber. Daya yang terjadi dalam pertukaran energi ini disebut sebagai daya reaktif yang dinyatakan oleh Q dan didefinisikan sebagai
θ
sin
Eff
Eff I
V
Q= × ( 2.12 )
Satuan daya reaktif adalah volt – ampere reaktif (var). Daya reaktif dapat bersifat kapasitif maupun induktif. Daya reaktif pada umumnya induktif dan digunakan sebagai pembangkit fluks magnetik pada mesin – mesin listrik dan transformator.
2.2.3. Faktor Daya
Perbandingan daya rerata terhadap daya nyata disebut faktor daya (pf) [5]. Faktor daya dapat pula dinyatakan sebagai
θ
cos
=
pf ( 2.13 )
Faktor daya dapat bernilai antara -1 (kapasitif) hingga 1 (induktif). Sewaktu menyebutkan faktor daya lazim memasukkan tanda θ. Faktor daya pf > 0 jika arus tertinggal dari tegangan, sedangkan pf < 0 jika arus mendahului tegangan.
2.2.4. Segitiga Daya, Daya Kompleks
jQ P
S = + ( 2.14 )
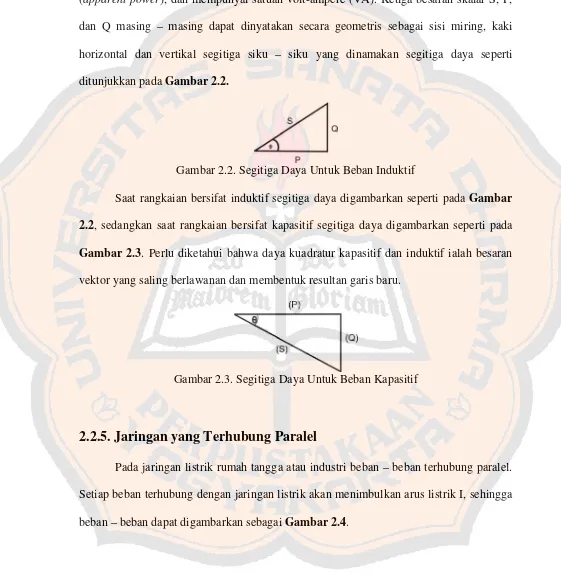
Besarnya daya kompleks dihitung dengan Persamaan (2.11). S dinamakan daya semu (apparent power), dan mempunyai satuan volt-ampere (VA). Ketiga besaran skalar S, P, dan Q masing – masing dapat dinyatakan secara geometris sebagai sisi miring, kaki horizontal dan vertikal segitiga siku – siku yang dinamakan segitiga daya seperti ditunjukkan pada Gambar 2.2.
Gambar 2.2. Segitiga Daya Untuk Beban Induktif
Saat rangkaian bersifat induktif segitiga daya digambarkan seperti pada Gambar 2.2, sedangkan saat rangkaian bersifat kapasitif segitiga daya digambarkan seperti pada
Gambar 2.3. Perlu diketahui bahwa daya kuadratur kapasitif dan induktif ialah besaran vektor yang saling berlawanan dan membentuk resultan garis baru.
Gambar 2.3. Segitiga Daya Untuk Beban Kapasitif
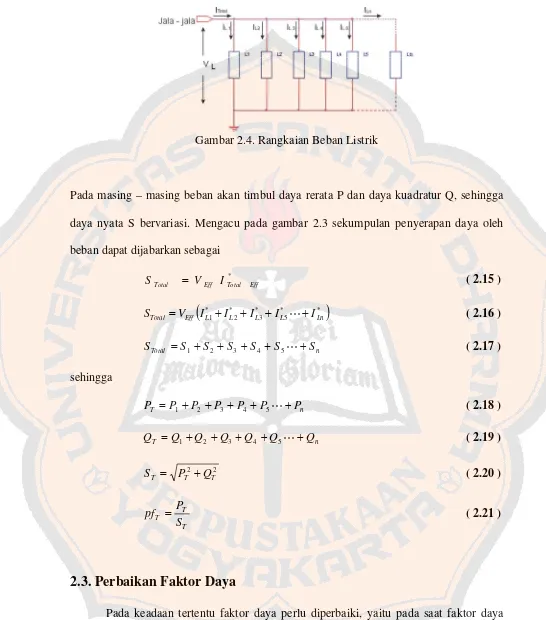
2.2.5. Jaringan yang Terhubung Paralel
Gambar 2.4. Rangkaian Beban Listrik
Pada masing – masing beban akan timbul daya rerata P dan daya kuadratur Q, sehingga daya nyata S bervariasi. Mengacu pada gambar 2.3 sekumpulan penyerapan daya oleh beban dapat dijabarkan sebagai
*
Eff Total Eff
Total V I
S = ( 2.15 )
(
* *)
5 * 3 * 2 *1 L L L Ln L
Eff
Total V I I I I I
S = + + + L+ ( 2.16 )
n
Total S S S S S S
S = 1+ 2 + 3 + 4 + 5L+ ( 2.17 )
sehingga
n
T P P P P P P
P = 1+ 2 + 3 + 4 + 5L+ ( 2.18 )
n
T Q Q Q Q Q Q
Q = 1 + 2 + 3 + 4 + 5L+ ( 2.19 )
2 2
T T
T P Q
S = + ( 2.20 )
T T T
S P
pf = ( 2.21 )
2.3. Perbaikan Faktor Daya
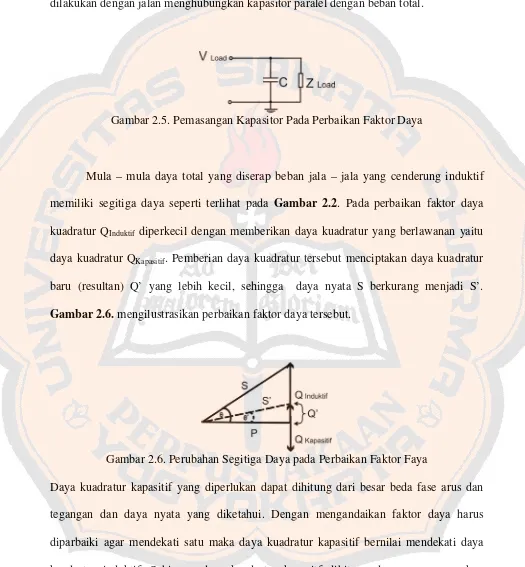
tinggi. Daya kuadratur induktif dikurangi dengan memberikan daya kuadratur kapasitif yang berlawanan dengan daya kuadratur induktif. Pemberian daya kuadratur kapasitif dilakukan dengan jalan menghubungkan kapasitor paralel dengan beban total.
Gambar 2.5. Pemasangan Kapasitor Pada Perbaikan Faktor Daya
Mula – mula daya total yang diserap beban jala – jala yang cenderung induktif memiliki segitiga daya seperti terlihat pada Gambar 2.2. Pada perbaikan faktor daya kuadratur QInduktif diperkecil dengan memberikan daya kuadratur yang berlawanan yaitu
daya kuadratur QKapasitif. Pemberian daya kuadratur tersebut menciptakan daya kuadratur
baru (resultan) Q’ yang lebih kecil, sehingga daya nyata S berkurang menjadi S’.
Gambar 2.6. mengilustrasikan perbaikan faktor daya tersebut.
Gambar 2.6. Perubahan Segitiga Daya pada Perbaikan Faktor Faya
S
QC =sin(θ)* ( 2.22 )
Atau dapat juga dihitung dari nilai daya nyata dan faktor daya (pf).
S pf
QC =sin(cos−1( ))* ( 2.23 )
Sedangkan nilai kapasitor yang dibutuhkan dapat dihitung dengan persamaan.
(
)
⎟⎟⎠⎞ ⎜⎜ ⎝ ⎛ × × × = f v Q C C π2 ( 2.24 )
Bila beberapa kapasitor dengan nilai tertentu digunakan untuk memperbaiki faktor daya maka jumlah kapasitor yang diperlukan dapat dihitung dengan persamaan.
Qc
S pf
nC sin(cos ( ))*
1
−
= ( 2.24 )
dengan ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ × × × = C f v Qc π 2 1 2
( 2.25 )
Nilai faktor daya hasil perbaikan faktor daya dengan menggunakan beberapa kapasitor dengan nilai tertentu dapat dihitung dengan persamaan.
2 2 *) ( ) ( ' Qc Qi pf S pf S pf − + × ×
= ( 2.26 )
Qc* merupakan daya yang diserap sejumlah kapasitor dengan nilai tertentu yang terpasang
untuk perbaikan faktor daya.
C
C nC Q
Q *= * ( 2.27 )
Daya nyata yang terjadi setelah perbaikan faktor daya dapat dihitung dengan menggunakan rumus sebagai berikut
(
) (
2)
2*
' S pf Qi Qc
Perbaikan faktor daya akan menimbulkan penurunan daya nyata, penurunan tersebut dapat dihitung dengan persamaan.
'
S S S = −
∆ ( 2.29 )
2.4. Resistor Terhubung Seri ( Pembagi Tegangan )
Gambar 2.7. Resistor Terhubung Seri
Sebuah susunan dua atau lebih resistor terhubung seri dikenal sebagai pembagi
tegangan. Pada Gambar 2.7 terdapat tiga resistor terhubung seri. Pada ujung – ujung rangkaian resistor tersebut diberikan tegangan catu sebesar V, karena itu terjadi arus ITotal
yang besarnya dihitung dengan
c b a Total R R R V I + +
= ( 2.30 )
Dengan menggunakan prinsip hukum Ohm tegangan masing – masing resistor dapat dihitung dengan.
n Total
R I R
V
n = × ( 2.31 )
Karena resistansi total seri dihitung dengan rumus
n c
b a
Total R R R R
R = + + +L+ ( 2.32 )
maka tegangan total VTotal = V dapat dihitung dengan
Total Total
Total V I R
V = = × ( 2.33 )
Dari hukum Ohm perbandingan tegangan untuk tiap – tiap resistor dituliskan sebagai
Total n Total Total n Total Total R R R R I R I V V n = × ×
2.5. Transformator
Transformator ialah alat khusus yang digunakan untuk memindah ( transferring ) daya listrik AC dari rangkaian satu kepada rangkain lainnya tanpa mengubah frekuensi listrik. Pada bentuk paling sederhana, transformator terdiri dari dua lilitan (primer dan skunder) yang terlilit pada inti yang saling menginduksi.
Gambar 2.8. Transformator Ideal dengan Beban
Transformator ideal dengan beban dapat digambarkan seperti pada Gambar 2.8
[12]. Pada transformator ideal berlaku persamaan perbandingan lilitan, tegangan, dan arus antara lilitan primer dan skunder sebagai berikut.
1 2 2 1
I I V V N N a
S
P = =
= ( 2.35 )
dengan :
a : Perbandingan antara lilitan primer dengan lilitan skunder NP : Jumlah lilitan primer
NS : Jumlah lilitan skunder
V1 : Tegangan lilitan primer
V2 : Tegangan lilitan skunder
I1 : Arus lilitan primer
2.5.1 Transformator Arus
Transformator sensor arus (biasa disebut transformator arus) pada dasarnya adalah transformator standar yang kumparan primernya dihubungkan secara seri dengan penghantar yang membawa arus AC. Pada kumparan skunder terjadi arus biasanya diakhiri oleh resistor. Tegangan skunder yang dihasilkan berbanding lurus terhadap arus pada kumparan skunder.
Prinsip Kerja Transformator Arus
Rangkaian transformator arus ditunjukkan oleh Gambar 2.9.
Gambar 2.9. Transformator Arus
Pada beberapa teknik pengukuran arus, besaran arus dirubah ke dalam bentuk tegangan. Proses pengubahan ini dilakukan dengan cara memasang resistor beban (burden resistor) secara paralel dengan lilitan skunder, sehingga terbentuk sebuah rangkaian seperti Gambar 2.10 [13].
Besarnya tegangan yang terjadi dapat dihitung dengan Persamaan (2.36) yaitu.
t S
O I R
V = × ( 2.36 )
2.5.1.1 Efek Pemasangan Rt
Pada saat pemasangan Rt maka transformator arus akan berperilaku seperti transformator pada umumnya (transformator daya) yang mendapat beban, dimana transformator arus dapat digambarkan seperti pada Gambar 2.11 [12,13].
I R 2 Z' 2 X1 V' R' X E' I' E 1 1 O 2 2 O 1 I 2 1 = L R X' O V
Gambar 2.11. Gambar Rangkaian Ekuivalen Transformator dengan Beban Pendekatan Skunder Dibawa ke Primer
Pada Gambar 2.11 berlaku rumus :
X’2=X2×a2 ( 2.37 ) R’2
2 2 a
R ×
= ( 2.38 )
R’L=RL×a2 ( 2.39 ) Z’L
2
a ZL×
= ( 2.40 )
X’L= XL×a2 ( 2.41 ) IO
2 2
w
m I
I +
= ( 2.42 )
I’2 =I2×a ( 2.43 ) E’2 =V1−I'2
(
R1+ jX1)
( 2.44 )1
2 1 2 '
' V I ZO
V = − ( 2.45 )
Dengan :
Im =IOsinΦO ( 2.46 ) Iw= IOcosΦO ( 2.47 )
1 1
1 O O
O R jX
Z = + ( 2.48 ) RO1 =R1+R'2 ( 2.49 )
2 1 '
1 jX jX
XO = + ( 2.50 )
Impedansi antara ujung masukan dan keluaran transformator dihitung dengan
(
)
⎟⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ + + + = m L Z Z Z Z Z 1 ' 1 1 ' 21 ( 2.51 )
dengan :
Z1 =R1 + jX1 ( 2.52 )
Z’2 = R’2 + jX’2 ( 2.53 )
Zm = RO + jXO ( 2.54 )
Zm merupakan impedansi penguatan.
2.6. Penguat operasional Sebagai Pembanding Tak Membalik
Pembanding yang dibuat dari penguat operasional memiliki konfigurasi seperti pada Gambar 2.13.
Gambar 2.13. Penguat Operasional Sebagai Pembanding Tak Membalik
Pada Gambar 2.13. tegangan referensi sebesar nol volt (ground). Penguat operasional memiliki penguatan open loop yang mendekati tak berhingga sehingga saat terjadi perbedaan antara tegangan referensi dengan tegangan masukan pada tegangan keluaran akan terjadi tegangan yang amat besar. Namun karena dibatasi oleh kemampuan penguat operasional yang hanya mampu menghasilkan tegangan keluaran sebesar tegangan catu maka akan terjadi tegangan saturasi positif atau negatif. Berikut deskripsi matematis tegangan keluaran pembanding.
Sat
O V
V =− Untuk V_In<VReff ( 2.55 )
Sat
O V
2.7. Penguat operasional Sebagai Penyearah Presisi Dengan Penguatan
Penyearah presisi terdiri dari sebuah penguat operasional sebagai penyearah setengah gelombang kuadran ke empat dan penguat penjumlah membalik. Penyearah ini dapat menyearahkan tegangan masukan tanpa harus terpotong oleh tegangan buka dioda yang digunakan.
Penguatan penyearah presisi dapat diatur dengan perbandingan Rf dan R. Besarnya penguatan ditentukan dengan Persamaan (2.49):
R Rf Av=
( 2.57 )
Apabila Rf = R maka penguatan yang terjadi sebesar satu kali.
Gambar 2.14. Penguat operasional Penyearah Presisi Gelombang Penuh
2.8. Optoisolator
Komponen ini pada dasarnya terdiri dari dua komponen yaitu, dioda LED dan transistor foto. Dioda LED berfungsi memancarkan cahaya yang ditangkap oleh transistor
foto. Transistor yang terpapar cahaya akan dapat mengalirkan arus dengan memberikan bias tegangan.
Gambar 2.15. Optoisolator Dalam Kemasan IC (Dua Pasang)
Gambar 2.16. Konfigurasi Dasar Optoisolator
2.9. Mikrokontroler ATmega32
2.9.1. Penempatan Pin
Mikrokontroler ATmega32 dengan kemasan plasitk PDIP 40 pin memiliki konfigurasi pin seperti nampak pada Gambar 2.17. berikut.
Gambar 2.17. Penempatan Pin Mikrokontroler ATmega32
2.9.1.1 Fungsi Alternatif Port – Port I/O
Setiap port pada mikrokontroler ini mempunyai fungsi alternatif selain sebagai I/O digital. Penggunaan fungsi lain selain sebagai I/O digital dapat dilakukan setelah terlebih dahulu mengatur register yang diperlukan [16].
2.9.1.1.1 Port A
Tabel 2.1. Fungsi Alternatif Port A
2.9.1.1.2 Port B
Fungsi alternatif port B selain sebagai I/O digital adalah:
• SCK SPI bus Serial Clock. Digunakan saat download program ke chip memori.
• MISO SPI bus Master Input/Slave Output. Digunakan saat download program ke chip memori.
• MOSI SPI bus Master Output/Slave Input. Digunakan saat download program ke chip memori.
• SS SPI Slave Select Input. Digunakan saat download program ke chip
memori.
• AIN1 Pembanding analog masukan negatif.
• AIN0 Pembanding analog masukan positif.
• OC0 Timmer/Counter1 Output Compare Match Output.
• INT2 Masukan interupsi eksternal 2.
• T1 Timer/Counter1 masukan eksternal pencacah.
• T0 Timer/Counter0 masukan eksternal pencacah.
• XCK USART Eksternal Clock Input/Output.
Tabel 2.2. Fungsi Alternatif Port B
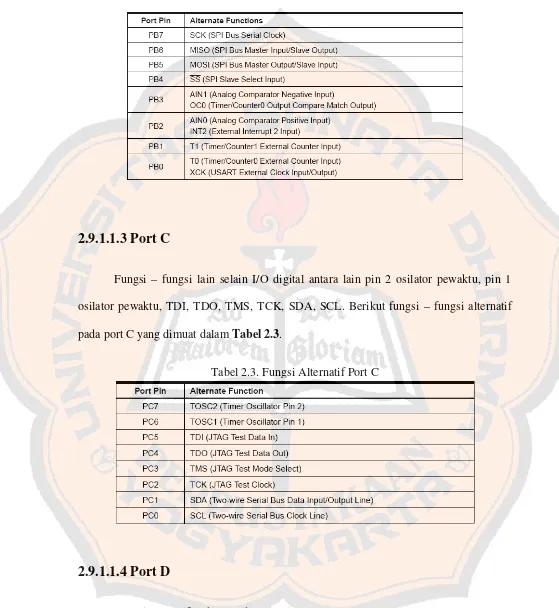
2.9.1.1.3 Port C
Fungsi – fungsi lain selain I/O digital antara lain pin 2 osilator pewaktu, pin 1 osilator pewaktu, TDI, TDO, TMS, TCK, SDA, SCL. Berikut fungsi – fungsi alternatif pada port C yang dimuat dalam Tabel 2.3.
Tabel 2.3. Fungsi Alternatif Port C
2.9.1.1.4 Port D
pin Timer/Counter1 Input Capture. Fungsi alternatif secara detil dijabarkan dalam Tabel
2.4.
Tabel 2.4. Fungsi Alternatif Port D
2.9.2 Peta Memori
ATmega32 terdapat memori flash sebesar 32 KB yang dapat diprogram ( saat ) di dalam sistem (ISP) untuk penyimpanan program, SRAM 2 KB, dan 1024 byte EEPROM.
2.9.2.1 Memori
Flash
yang Dapat Diprogram Secara ISP
Gambar 2.18. Peta Memori Progam
2.9.2.2 Memori Data SRAM
Pada mikrokontroler ATmega32 terdapat SRAM data internal sebesar dua KB. SRAM tersebut dibedakan menjadi tiga yaitu X, Y, dan Z. Pada file register, register – register R26 sampai R31 fasilitas Addressing PointerRegisters tak langsung. Pengalamatan langsung mencaoai seluruh SRAM. Mode pengalamatan dengan Displacement mencapai 63 lokasi alamat dari basis alamat yang diberikan oleh register Y atau Z. Gambar 2.23. menunjukkan peta memori SRAM.
2.9.2.3 Memori Data EEPROM
ATmega32 berisi 1024 byte memory data EEPROM. Memory ini diorganisasikan sebagai ruang data yang terpisah yang dapat dibaca dan ditulis secara byte tunggal. Alamat EEPROM dialamati dari nol sampai 1023. EEPROM diakses menggunakan EEPROM Access Register.
a. EEPROM Address Register
– EEARH dan EEARL
Gambar 2.20. Eeprom Address Register
EEPROM Address Register (EEARL dan EEARH) menunjukkan alamat pada ke 1024 ruang EEPROM. Data dialamati antara 0 sampai 1023.
b. EEPROM Data Register
–EEDR
Gambar 2.21. EEPROM Data Register – EEDR
c. EEPROM Control Register – EECR
Gambar 2.22. EEPROM Control Register – EECR
• Bit 7 sampai 4: Bit – bit yang dicadangkan untuk pengembangan
Bit – bit yang dicadangkan pada ATmega32 akan selalu dibaca sebagai nol.
• Bit 3 – EERIE: EEPROM Ready Interrupt Enable
Memberi nilai satu pada EERIE mengaktifkan EEPROM Ready Interrupt bila I bit pada SREG satu. Memberi nilai nol pada EERIE menonaktifkan EEPROM Ready Interrupt. EEPROM Ready Interrupt membangkitkan sela konstan bila EEWE di-nol-kan.
• Bit 2 – EEMWE: EEPROM Master Write Enable
Apabila EEMWE bernilai nol akan menyebabkan penulisan pada EEPROM depat dilakukan. Bila bernilai nol pemberian nilai satu pada register EEWE tidak akan menyebabkan perubahan.
• Bit 1 – EEWE: EEPROM Write Enable
Bila melakukan penulisan data pada EEPROM maka harus bernilai satu.
• Bit 0 – EERE: EEPROM Read Enable
2.9.2.4 Register I/O
Register I/O mempunyai jangkauan alamat $00 sampai $1F. Register ini dapat dimanipulasi bit dengan perintah SBI dan CBI secara langsung. Daftar lengkap tentang register ini dapat dilihat pada “register summary” pada data sheet ATmega32.
2.9.3. Alamat Vektor
Alamat vektor merupakan alamat program yang dituju bila terjadi sela. ATmega32 mempunyai 21 alamat vektor untuk berbagai sela, Tabel 2.5 menunjukkan alamat – alamat interupsi yang disediakan.
2.9.4. Register CPU
• Status Register – SREG
Status register berisi satu global interupt mask, satu bit storage, dan enam register bendera (flag register).
Gambar 2.23. SREG
Keterangan :
• Bit tujuh – I : Global Interupt Enable
Bit ini bila bernilai satu akan mengaktifkan sela ( interupt ) global.
• Bit enam – T : Bit Copy Storage
Pada instksi BLD ( Bit LoaD ) dan BST ( Bit STore ) menggunakan bit T sebagai sumber atau tujuan bit yang dioperasikan.
• Bit lima – H : Half Carry Flag
Half Carry Flag H menandakan terjadinya hakf carry pada beberapa operasi matematis.
• Bit empat – S : Bit tanda, S = N ⊕ V
Bit tanda yang selalu berlaku operasi logika exclusive or antara
• Bit tiga – V : Two’s Complement Overflow Flag
Two’s Complement Overflow Flag V mendukung aritmatika
komplemen dua.
• Bit dua – N : Negative Flag
Menandakan adanya hasil negatif suatu operasi matematis atau logika.
• Bit satu – Z : Zero Flag
Zero Flag Z menandakan hasil berupa angka nol dalam operasi matematis atau logika.
• Bit nol – C : Carry Flag
Carry Flag C menandakan terjadi bawaan pada operasi logika atau aritmatika.
• General Purpose Register File
Register ini mempunyai feature yang mendukung aritmatika delapan bit dan 16 bit. Berikut feature – feature register tujuan umum:
o Satu operand keluaran delapan bit dan satu masukan hasil delapan bit. o Dua operand keluaran delapan bit dan satu satu masukan hasil delapan bit. o Dua operand keluaran delapan dan bit satu masukan hasil 16 bit
o Satu operand keluaran 16 bit dan satu masukan hasil 16 bit.
Register X, Register Y, Register Z
untuk pengalamatan tak langsung Data Space. Ke tiga register alamat tak langsung X, Y, dan Z digambarkan dalam Gambar 2.24.
Gambar 2.24. Register X, Y, dan Z
• Stack Pointer
Stack pointer secara umum digunakan untuk menyimpan data sementara, untuk menyimpan variabel lokal, dan untuk menyimpan alamat return setelah interupsi, dan panggilan (call). Stack pointer diimplementasikan sebagai dua register delapan bit dalam register I/O.
Gambar 2.25. Stack Pointer
2.9.5. Register untuk
Port I/O
ATmega32 memiliki empat port I/O ( Port A, Port B, Port C, dan Port D ).
Pada setiap port terdapat tiga register yang sama bagi masing – masing port, yaitu:
• Port A Data Register – PORTx
• Port A Data Direction Register – DDRx
Isi dari register ini menentukan arah/fungsi port I/O, yaitu masukan atau keluaran. Apabila bit pin ke n satu maka pin ke n berfungsi sebagai keluaran, sedangkan bila bernilai nol maka pin ke n akan berfungsi sebagai masukan.
• Port A Input Pins Address – PINx
Merupakan alamat pin yang bersangkutan.
Tabel 2.6 Efek Nilai DDx dan Pin x
DDxn PORTxn I/O Pull-up Keterangan
0 0 1 1
0 1 0 1
Masukan Masukan Keluaran Keluaran
Tidak Ya Tidak Tidak
Tri-State ( Impedansi tinggi )
Pin Xn akan menjadi sumber jika Pulled-down Push-pull keluaran nol
Push-pull keluaran satu
Keterangan :
x : menandakan port x ( x = A, B, C, atau D )
n : index bit ke n ( n = nol sampai tujuh dengan tujuh sebagai MSB )
•
Special Function Input / Output Register ( SFIOR )Tabel 2.7. SFIOR
Bit n 7 6 5 4 3 2 1 0
Nama ADTS2 ADTS1 ADTS0 - ACME PUD PSR2 PSR10
Sifat R/W R/W R/W R R/W R/W R/W R/W
Nilai awal 0 0 0 0 0 0 0 0
o ADTS2 sampai ADTS0
ADTS ( ADC Triger Select ) digunakan sebagai bit – bit pemilih sumber
pemicu ADC. Sumber – sumber yang bisa dipilih antara lain di perlihatkan dalam Tabel 2.8.
Tabel 2.8. Sumber – sumber Pemicu ADC
o ACME
ACME ( Analog Comparator Multiplexer Enable ), bit yang mengatur keaktifan multiplekser pembanding analog. Multiplekser ini berfungsi untuk memilih saluran mana saja yang digunakan untuk masukan negatif pembanding.
o PUD
PUD (Pull-Up Disable) berfungsi untuk mengaktur keaktifan pull-up
o PSR2 dan PSR10
PSR (PreScaler Reset) berfungsi untuk me-reset nilai prescaler
pewaktu/pencacah. PSR2 untuk timer/counter2 dan PSR10 untuk timer/counter1 dan timer/counter0.
2.9.6. Analog Comparator
Analog comparator membandingkan antara masukan positif dan negatif. Masukan positif dan negatif ini dapat berasal dari pin AIN0 dan AIN1 atau tegangan acuan internal (Bandgap Reference) dan keluaran multiplexer ADC. Keluaran pembanding dapat digunakan sebagai pembangkit interupsi pembanding analog (Analog Comparator IRQ), maupun sebagai pemicu capture trigger pewaktu 16 bit (Timmer/Counter1).
Gambar 2.26. Blok Diagram AnalogComparator
Pembanding analog diatur melalui dua register yaitu:
Masukan negatif pembanding analog dapat berasal AIN1 atau dari keluaran ADC multiplexer. Apabila ACME di beri nilai satu maka keluaran ADC diberikan pada masukan negatif pembanding, sedangkan jika ACME bernilai nol maka AIN0 menjadi masukan negatif pembanding. Pengaktifan ACME untuk memilih saluran masukan negatif pembanding harus bersamaan dengan pengaturan ADEN pada ADCSRA. Bit – bit SFIOR ditunjukkan oleh
Gambar 2.31.
Gambar 2.27. Special Function Input / Output Register 2. Analog Comparator Controland Status Register – ACSR
Pengaturan pembanding analog dilakukan dengan mengatur ACSR. Bit – bit ACSR ditunjukkan oleg Gambar 2.32.
Gambar 2.28. Analog Comparator Control and Status Register
• ACD ( Analog Comparator Disable ).
Apabila bernilai satu maka akan mematikan pembanding analog.
• ACBG ( Analog Comparator Bandgap Select ).
Bila bernilai satu maka tegangan referensi yang dipilih adalah tegangan referensi internal (tegangan referensi bandgap).
Merupakan keluaran pembanding analog, bernilai nol atau satu.
• ACI (Analog Comparator Inteupt Flag)
Bernilai satu jika terjadi interupsi pembanding analog yang ditentukan oleh ACIS1 dan ACIS0.
• ACIC (Analog Comparator Input Capture Enable)
Bila bernilai satu mengaktifkan picuan input capture timer1 yang dipicu oleh pembanding analog.
• ACIS1 dan ACIS0 ( Analog Comparator Interupt Mode Select )
Menentukan peristiwa pembanding analog mana yang memicu interupsi.
Tabel 2.9 menjelaskan pengaturan agar peristiwa pembanding analog mana yang memicu interupsi.
Tabel 2.9 Pengaturan ACIS1 dan ACIS0
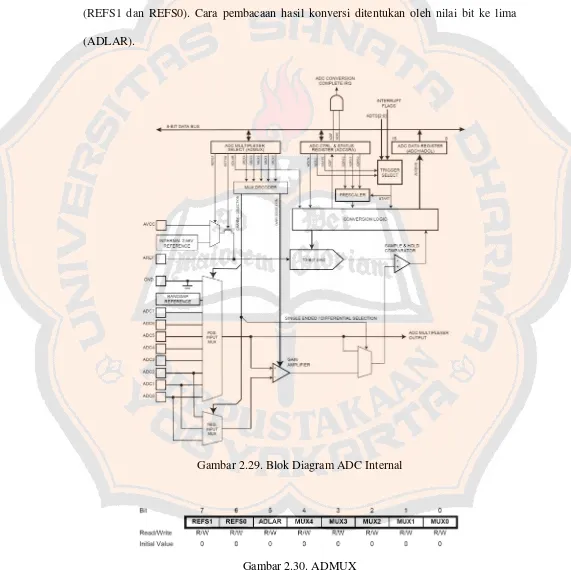
2.9.7. Analog-to-Digital
Converter
( ADC )
Pemilihan saluran masukan, pemilihan tegangan referensi, serta cara pembacaan hasil konversi diatur dalam register ADMUX. Pemilihan saluran ADC dilakukan dengan mengatur bit ke empat sampai bit ke nol ADMUX ( MUX3 sampai Mux0 ). Pemilihan tegangan referensi dilakukan dengan mengatur bit ke tujuh dan bit ke enam ADMUX (REFS1 dan REFS0). Cara pembacaan hasil konversi ditentukan oleh nilai bit ke lima (ADLAR).
Gambar 2.29. Blok Diagram ADC Internal
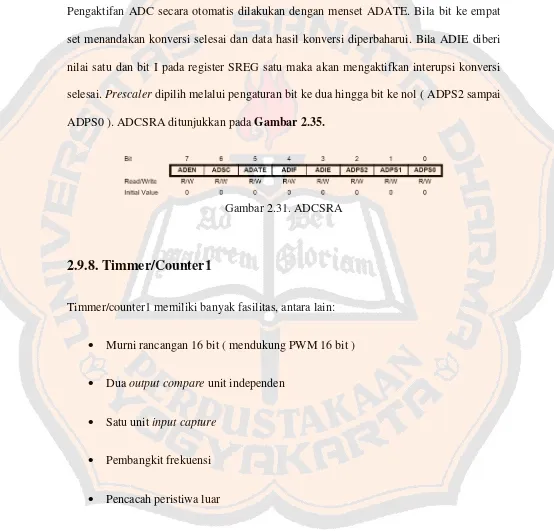
Pengaktifan ADC, memulai konversi, aktifasi picu otomatis ADC, ADCInterrupt Flag, aktifasi interupsi ADC, serta prescaler ADC diatur dalam register ADCSRA. Pengaktifan ADC dilakukan dengan menset bit ke tujuh ADCSRA ( ADEN ). Untuk memulai konversi dilakukan dengan menset bit ke enam ADCSRA ( ADSC ). Pengaktifan ADC secara otomatis dilakukan dengan menset ADATE. Bila bit ke empat set menandakan konversi selesai dan data hasil konversi diperbaharui. Bila ADIE diberi nilai satu dan bit I pada register SREG satu maka akan mengaktifkan interupsi konversi selesai. Prescaler dipilih melalui pengaturan bit ke dua hingga bit ke nol ( ADPS2 sampai ADPS0 ). ADCSRA ditunjukkan pada Gambar2.35.
Gambar 2.31. ADCSRA
2.9.8. Timmer/Counter1
Timmer/counter1 memiliki banyak fasilitas, antara lain:
• Murni rancangan 16 bit ( mendukung PWM 16 bit )
• Dua output compare unitindependen
• Satu unit input capture
• Pembangkit frekuensi
• Pencacah peristiwa luar
Gambar 2.32. Blok Diagram Timmer/Counter1
Pengaturan fungsi timmer/counter1 dilakukan dengan mengatur bit – bit register TCCR1A, TCCR1B, ICR1, OCR1A, OCR1B, TIMSK, TIFR. TCCR1A digunakan sebagai pengatur output compare saluran A dan B, serta PWM. TCCR1B digunakan sebagai pengatur input capture, pengaturan PWM, dan pengaturan prescaler
timmer/counter1.
Pengaturan TCCR1A mengakibatkan perubahan fungsi pewaktu/pencacah (sebagai output compare atau perubahan mode PWM). Berikut keterangan pengaturan TCCR1A.
• COM1A1 - COM1A0 dan COM1B1 - COM1B0
Bit bit ini berfungsi untuk mengatur fungsi output compare. Pengaturan output compare mengikuti Tabel 2.10.
Tabel 2.10. Pengaruh Pengaturan COM1x0 dan COM1x1
• FOC1A dan FOC1B
Merupakan bit untuk memaksa output compare match. Bit – bit ini dapat digunakan setelah mengatur bit – bit WGM13 sampai WGM10 untuk menjadikan mode non-PWM.
• WGM11 dan WGM10
Merupakan bit – bit pengatur pembangkit gelombang ( wave generator mode ). Bit – bit diatur bersama dengan bit WGM12 dan WGM13 pada register TCCR1B.
Pengaturan TCCR1B mengakibatkan perubahan fungsi pewaktu/pencacah (sebagai input capture atau perubahan mode PWM). Berikut fungsi bit – bit pada TCCR1B.
• ICNC1 ( Input Capture Noise Canceller )
Bila bernilai satu akan mengaktifkan input capture noise canceller. Sangat berguna untuk menekan effek sinyal derau.
• ICES1 ( Input Capture Edge Select )
Menentukan sudut sinyal peicu. Bila bernilai satu maka rissing edge memicu input
capture, sedangkan bila bernilai nol maka falling edge akan memicu input capture.
• WGM13 dan WGM12 (Wave Generator Mode)
Diatur bersamaan dengan WGM11 dan WGM10 pada TCCR1A. Berguna untuk megatur mode PWM atau pembangkit gelombang.
• CS12, CS11 dan CS10 (Clock Select)
Berfungsi memilih clock yang dipakai dengan mengatur prescaler pewaktu. Tabel
prescaler diperlihatkan oleh Tabel 2.11.
Beberapa aplikasi memerlukan suatu manipulasi interupsi. Pemgaturan interupsi timer/counter1 dilakukan dengan mengatur TIMSK. Pada TIMSK terdapat bit – bit untuk mengatur timer/counter1 seperti Gambar 2.39 :
Gambar 2.35. TIMSK
• TICIE1 (Timer/Counter1 Input Capture Interupt Enable)
Bila bernilai satu akan mengaktifkan interupsi input capture.
• OC1E1A dan OCIE1B (Output Compare Match Interupt Enable) saluran A dan B
Bila bernilai satu akan mengaktifkan interupsi output compare match untuk saluran A dan B.
• TOIE1 (Timer Overflow Interupt Enable)
Bila bernilai satu akan mengaktifkan interupsi timer/counter1 overflow (limpahan cacahan).
Pengaktifan suatu interupsi akan mengakibatkan perubahan flag tertentu pada TIFR. Berikut flag – flag yang akan berubah jika terjadi interupsi tertentu berkaitan dengan timer/counter1.
Gambar 2.36. TIFR
• ICF1 (Input Capture Flag )
timer/counter1 mencapai cacahan teratas.
• OCF1A dan OCF1B (Output Compare Match Flag ) saluran A dan B
Akan bernilai satu jika terjadi compare match.
• TOV1 ( Timer/Counter1 Overflow Flag )
Akan bernilai satu jika timer/counter1 overflow.
2.10. Modul LCD LMB162A
Modul LCD LMB162A nampak pada Gambar 2.41. (a) dan Gambar 2.41. (b). Modul LCD ini menggunakan controller KS0066 yang setara dengan controller
HD4780U buatan Hitachi yang sama – menggunakan antarmuka delapan bit atau empat but.
( a ) ( b )
Gambar 2.37. Modul LCD LMB162A ( a ) Tampak Depan ( b ) Tampak Belakang
2.11.1. Pin – Pin Modul LCD
Tabel 2.12. Simbol dan Nama Pin
2.10.2. Register Instruksi (IR) dan Register Data (DR)
Controller LCD memiliki dua register yaiu register instruksi (IR) dan register data (DR). IR bersifat write only, digunakan untuk menyimpan kode perintah tampilan. DR bersifat baca/tulis (read/write) digunakan untuk menyimpan data yang akan dibaca atau tulis dari atau ke DDRAM atau CGRAM.
2.10.3. Display Data RAM (DDRAM)
Register ini menyipan data tampilan yang direpresentasikan dalam delapan bit
Tabel 2.13. Alamat Posisi Karakter
Posisi karakter 1 2 3 4 … 11 12 13 14 15 16
Baris 1 00 01 02 03 … 0A 0B 0C 0D 0E 0F
Alamat DDRAM
Baris 2 40 41 42 43 … 4A 4B 4C 4D 4E 4F
2.10.4. Code Generator ROM (CGROM)
Merupakan memory yang menyimpan pola karakter – karakter yang telah ditentukan oleh produsen penampil, memory ini tidak dapat dirubah oleh pengguna (permanen).
2.10.5. Code Generator RAM (CGRAM)
Berfungsi untuk menyimpan pola karakter yang diinginkan oleh pengguna.
Memory ini bersifat sementara, ketika catu daya hilang maka pola – pola karakter di dalamnya akan hilang. Memory yang tidak digunakan dapat dipakai sebagai RAM tujuan umum ( general purpose RAM ) [19].
2.11. Analisa Statistik
Analisa statistik digunakan untuk menyampaikan informasi tentang ciri – ciri
kumpulan data, seperti rerata, simpangan baku dan lain – lain.
2.11.1. Analisa Statistika Sederhana
1. Rerata ( mean )
data dibagi jumlah titik (n); atau di mana penjumlahabnnya dimulai dari i = 1 sampai n.
n y
y =
∑
i ( 2.58 )2. Simpangan Baku
Sebaran data di sekitar rerata merupakan simpangan baku ( sy ). sy dihitung
dengan Persamaan (2.59).
1
− =
n S s t
y ( 2.59 )
Dengan St adalah jumlah total kuadrat sisa – sisa ( residu ) antara butir data
dan rerata, dan dirumuskan sebagai.
(
)
∑
−= 2
y y
St i ( 2.60 )
3. Ragam ( varians / kuadrat simpangan baku )
Penyebaran data juga dapat dinyatakan sebagai kuadrat simpangan baku (s2y),
dinamakan varians (ragam).
1
2
− =
n S
sy t ( 2.61 )
2.12. Regresi Linear
E x a a
y = 0 + 1 + ( 2.62 )
Dengan :
a0 : Perpotongan (intercept)
a1 : Kemiringan (slope)
E : Galat atau sisa (residu)
Galat (residu) dinyatakan dengan menyusun ulang Persamaan (2.62) menjadi
Persamaan (2.63).
x a a y
E = − 0 − 1 ( 2.63 )
2.12.1 Kriteria Kecocokan “Terbaik” (Best Fit)
Suatu strategi untuk mencocokkan garis “terbaik” melalui data adalah meminimalkan jumlah galat – galat sisa [17]. Salah satunya seperti pada Persamaan (2.64).
(
)
∑
∑
= = − − = = n i n i i ir e y a a x
S 1 1 2 1 0 2
( 2.64 )
2.12.2 Kecocokan Kuadrat Terkecil Garis Lurus
Persamaan normal untuk menentukan a0 dan a1 diperlihatkan dalam Persamaan
(2.65).
(
)
∑
∑
∑
∑ ∑
− − = 2 2 1 i i i i i i x x n y x y x na ( 2.65 )
Dari persamaan diatas dipakai untuk mencari nilai a0 dengan Persamaan ( 2.66 ).
x a y
2.12.3 Pengukuran Galat Regresi Linear
Untuk kasus – kasus di mana (1) besaran di sekeliling garis mempunyai beraran serupa sepanjang keseluruhan rentang data dan (2) distribusi titik – titik ini di sekitar garis