BAB 2 BAB 2
LANDASAN TEORI LANDASAN TEORI
2.1
2.1 Program Program tujuan gandatujuan ganda
Program tujuan ganda merupakan variasi khusus dari program linear. Analisisnya Program tujuan ganda merupakan variasi khusus dari program linear. Analisisnya bertujuan untuk meminimumkan jarak antara at
bertujuan untuk meminimumkan jarak antara at au deviasi deviasi terau deviasi deviasi terhadap tujuan atauhadap tujuan atau sasaran yang telah ditetapkan dengan usaha yang dapat ditempuh untuk mencapai sasaran yang telah ditetapkan dengan usaha yang dapat ditempuh untuk mencapai tujuan secara memuaskan sesuai dengan syarat ikatan yang ada, yang membatasinya tujuan secara memuaskan sesuai dengan syarat ikatan yang ada, yang membatasinya berupa sumber daya yan
berupa sumber daya yang tersedia, teknologi yang ada, kendala tujuan dan sg tersedia, teknologi yang ada, kendala tujuan dan sebagainya.ebagainya. (Nasendi
(Nasendiet al et al , 2005)., 2005).
Dalam keadaan di mana seorang pengambil keputusan dihadapkan kepada Dalam keadaan di mana seorang pengambil keputusan dihadapkan kepada suatu persoalan yang mengandung beberapa tujuan, sehingga program linear tak dapat suatu persoalan yang mengandung beberapa tujuan, sehingga program linear tak dapat membantunya untuk memberikan pertimbagan secara rasional, karena program linear membantunya untuk memberikan pertimbagan secara rasional, karena program linear terbatas pada satu tujuan (tujuan tunggal), maka untuk menyelesaikannya diperlukan terbatas pada satu tujuan (tujuan tunggal), maka untuk menyelesaikannya diperlukan program tujuan ganda.
program tujuan ganda. Program tujuan ganda Program tujuan ganda berusaha untuk berusaha untuk meminimumkan deviasimeminimumkan deviasi berbagai
berbagai tujuan, tujuan, sasaran sasaran atau atau target target yang tyang telah elah ditetapkan ditetapkan dan dan program program tujuan tujuan gandaganda juga
juga akan akan mencoba mencoba untuk untuk memuaskan memuaskan atau atau memenuhi memenuhi target target yang yang telah telah ditentukanditentukan menurut skala prioritas masing-masing.
menurut skala prioritas masing-masing.
2.1.1
2.1.1 Konsep Dasar Konsep Dasar Program Program tujuan gandatujuan ganda
Agar memahami dengan baik bidang yang dipelajari, pembaca selalu harus mengerti Agar memahami dengan baik bidang yang dipelajari, pembaca selalu harus mengerti istilah-istilah dan lambing-lambang khusus yang digunakan. Berikut ini adalah istilah-istilah dan lambing-lambang khusus yang digunakan. Berikut ini adalah definisi dari beberapa istilah dan lambing yang biasa digunakan pada program tujuan definisi dari beberapa istilah dan lambing yang biasa digunakan pada program tujuan ganda.
Decision variables: seperangkat variable yang tak diketahui (dalam model program tujuan ganda dilambangkan dengan
, di mana j = 1,2,…,n) yang akan dicari nilainya. (variable keputusan).Righthand side values (RHS): nilai-nilai yang biasanya menunjukkan ketersediaan sumberdaya (dilambangkan dengan
) yang akan ditentukan kekurangan atau kelebihan penggunaannya. (nilai sisi kanan)Goal : keinginan untuk meminimalkan angka penyimpangan dari suatu nilai RHS pada suatu kendala tujuan tertentu. (tujuan).
Goal Constrain: yaitu suatu tujuan yang diekspresikan dalam persamaan matematik dengan memasukkan variable simpangan. (kendala tujuan)
Preemtive Priority Factor : suatu sistem urutan (yang dilambangkan dengan
, di mana
= 1,2,…
,
dan K menunjukkan banyaknya tujuan dalam model) yang memungkinkan tujuan-tujuan disusun secara ordinal dalam model program tujuan ganda. Sistem urutan menempatkan tujuan-tujuan dalam susunan dengan hubungan seperti berikut:
1 >
2 >>>
1 merupakan tujuan yang paling penting.
2 merupakan tujuan yang kurang penting dan seterusnya.Deviational variables: variable-variabel yang menunjukkan kemungkinan penyimpangan negatif dari suatu nilai RHS kendala tujuan (dalam model program tujuan ganda dilambangkan dengan
−
, di mana
= 1,2,…
,
dan m adalah banyaknya kendala tujuan dalam model) atai penyimpangan positif dari suatu nilai RHS (dilambangkan dengan
+. Variabel-variabel ini serupa dengan slack variabel dalam program linear. (variabel simpangan).Differential weight : timbangan matematika yang diekspresikan dengan angka kardinal (dilambangkan dengan
di mana
= 1,2,…
,
;
= 1,2,…
,
) dan digunakan untuk membedakan variabel simpangan i di dalam suatu tingkat prioritas k . (Bobot). Technological coefficient : nilai-nilai numerik (dilambangkan dengan
) yang menunjukkan penggunaan nilai
per unit untuk menciptakan
. (koefisien teknologi).Program tujuan ganda biasanya digunakan untuk menyelesaikan permasalahan linear dengan memasukkan berbagai tujuan yang dinyatakan sebagai goal dalam
formulasi modelnya. Setiap tujuan direpresentasikan secara numerik, Tujuan inilah yang ingin dicapai. Tetapi, berbagai tujuan tidak selalu dapat dicapai bersamaan , penyimpangan (deviasi) dari tujuan dapat terjadi. Maka dalam formulasi program tujuan ganda, tujuan dalam numerik untuk setiap tujuan harus ditetapkan terlebih dahulu. Kemudian solusi yang ingin dicapai adalah meminimumkan jumlah penyimpangan tujuan-tujuan ini terhadap masing-masing tujuannya.
Perbedaan utama antara program linear dan program tujuan ganda terletak pada struktur fungsi tujuannya. Dalam linear programming funsi tujuannya hanya mengandung satu tujuan, sedangkan program tujuan ganda satu fungsi tujuan atau beberapa fungsi tujuan digabungkan dalam sebuah fungsi tujuan. Hal ini dapat dilakukan dengan mengekspresikan tujuan itu dalam bentuk sebuah kendala, memasukkan suatu variabel simpangan dalam kendala itu, untuk menggambarkan seberapa jauh tujuan itu dapat dicapai, dan menggabungkan variabel simpangan dalam fungsi tujuan. Tujuan dalam program linear dapat maksimalkan atau minimalkan, sedangkan tujuan dalam program tujuan ganda adalah meminimalkan penyimpangan- penyimpangan dari tujuan-tujuan tertentu. Berarti semua masalah program tujuan
ganda adalah masalah meminimalkan.
2.1.2 Unsur-Unsur Program tujuan ganda
Setiap program tujuan ganda paling sedikit terdiri dar i tiga komponen, yaitu:
1. Fungsi Tujuan
Fungsi tujuan dalam program tujuan ganda umumnya adalah masalah minimisasi karena dalam program tujuan ganda terdapat variabel deviasi di dalam fungsi tujuan yang harus diminimumkan. Hal ini merupakan konsekuensi logis dari adanya vaiabel deviasi dalam fungsi kendala tujuan. Sehingga fungsi tujuan dalam program tujuan ganda adalah minimisasi penyimpangan atau minimisasi variabel deviasi.
Fungsi tujuan dalam program tujuan ganda ada tiga jenis:
a. Minimumkan 1 m i i i Z d d
Fungsi tujuan di atas gigunakan apabila variabel deviasi dalam suatu permasalahan tidak dibedakan menurut prioritas atau bobot.
b. Minimumkan 1 ( ) untuk 1, 2,..., m k i i i Z P d d k K
Fungsi tujuan di atas digunakan apabila urutan dari tujuan diperlukan tetapi variabel deviasi setiap tingkat prioritas dari tujuan memiliki kepentingan yang sama. c. Minimumkan 1 ( ) untuk 1, 2,..., m ki k i i i Z W P d d k K
Fungsi tujuan di atas digunakan apabila tujuan-tujuan diurutkan berdasarkan
prioritas dan dibedakan dengan diberikan bobot yang berlainan W ki.
2. Kendala Tujuan
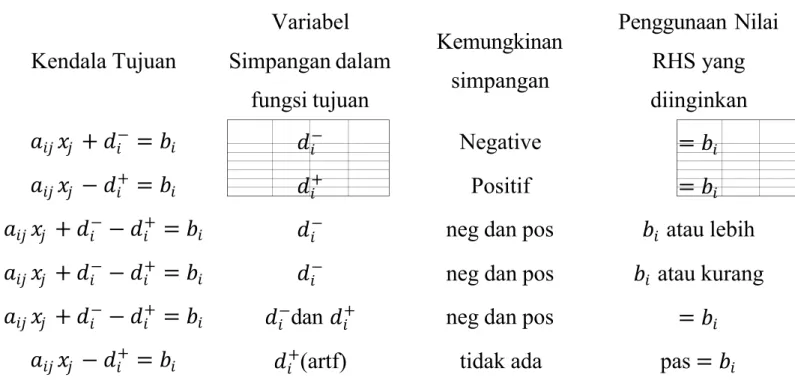
Ada enam jenis kendala tujuan yang berlainan. Maksud setiap jenis kendala itu ditentukan oleh hubungannya dengan fungsi tujuan. Setiap kendala tujuan harus memiliki satu atau dua variabel simpangan yang ditempatkan pada fungsi tujuan. Dimungkinkan adanya kendala-kendala yang tidak memiliki variabel simpangan. Kendala-kendala ini sama seperti kendala persamaan linear.
Tabel 2.1. Jenis-jenis kendala t ujuan Kendala Tujuan Variabel Simpangan dalam fungsi tujuan Kemungkinan simpangan Penggunaan Nilai RHS yang diinginkan
+
−
=
−
Negative =
−
+ =
+ Positif =
+
−
−
+ =
−
neg dan pos
atau lebih
+
−
−
+ =
−
neg dan pos
atau kurang
+
−
−
+ =
−
dan
+ neg dan pos =
−
+ =
+(artf) tidak ada pas=
Sumber: Mulyono, Sri. 1991.
Operation Research
. Lembaga Penerbit Fakultas ekonomi Universitas Indonesia, Jakarta.3. Kendala Non-Negatif
Seperti dalam program linear, variabel-variabel model program tujuan ganda biasanya bernilai lebih besar atau sama dengan nol. Semua model program tujuan ganda terdiri dari variabel simpangan dan variabel keputusan, sehingga pernyataan non negatif dilambangkan sebagai:
,
−
,
+≥
04. Kendala Stuktural
Selain tiga komponen, program tujuan ganda terkadang juga mengandung kendala struktural. Kendala struktural yaitu kendala-kendala lingkungan yang tidak berhubungan langsung dengan tujuan-tujuan dari masalah yang dipelajari. Variabel simpangan tidak dimasukkan dalam kendala ini, karena itu kendala ini tidak diikutsertakan dalam fungsi tujuan.
2.1.3 Asumsi Model Program Tujuan Ganda
Sebelum merumuskan model, perlu diketahui bahwa model program tujuan gandamemerlukan sejumlah asumsi. Jika dalam membuat modeldari suatu masalah tentu asumsi-asumsi tidak dapat dipenuhi, maka program tujuan ganda bukan merupakan model yang cocok untuk masalah yang sedang dipelajari. Jadi asumsi model membatasi penerapan program tujuan ganda.
1. Addivitas dan linearitas
Diasumsikan bahwa proporsi penggunaan
yang ditentukan oleh
harus tetap benar tanpa memperhatikan nilai solusi
yang dihasilkan. Artinya, LHS dari kendala tuuan harus sama dengan RHS. Dalam kehidupan sehari-hari, hubungan sinergistik dapat menyebabkan penyimpangan asumsi ini. Suatu contoh adalah ketika seseorang ditempatkan dalam suatu lingkungan yang kompetitif. Prosedur model lain, seperti program stokastik, cocok untuk memodelkan jenis persoalan ini.2. Divisibilitas
Diasumsikan bahwa nilai-nilai
,
−
,
+ yang dihasilkan dapat dipecah. Artinya, kita dapat menyelesaikan jumlah pecahan nilai
dan menggunakanjumlah pecah sumber daya dalam situasi itu. Asumsi ini tidak membatasi penggunaan model program tujuan ganda, karena prosedur solusi program
tujuan yang lain, yaitu program tujuan integer, dapat mencari solusi integer. 3. Terbatas
Diassumsikan bahwa nilai
,
−
,
+ yang dihasilkan terbatas. Artinya, kita tidak dapat memiliki nilai variabel keputusan, sumber daya, atau penyimpangan tujuan yang tak terbatas. Segalanya dalam dunia ini terbatas. 4. Kepastian dan periode waktu statisDiasumsikan bahwa parameter model program tujuan ganda seperti
,
,
,
diketahui dengan pasti dan mereka akan tetap statis selama periode perencanaan di mana hasil model digunakan.2.1.4 Perumusan Masalah Program Tujuan
Agar mengerti bagaimana merumuskan suatu masalah program tujuan ganda, perlu diketahui prosedur perumusan. Kemudian diterapkan prosedur itu pada beberapa situasi persoalan yang berlainan.
1. Prosedur Perumusan
Perumusan suatu masalah program tujuan ganda sangat mirip deengan perumusan sebuah masalah program linear. Penjelasan variabel keputusan
,koefisien
, dan nilai sisi kanan
, diperlukan baik pada program linear maupun program tujuan ganda. Langkah-langkah perumusan program tujuan ganda meliputi beberapa tahap.a. Tentukan variabel keputusan
Kuncinya adalah menyatakan dengan jelas variabel keputusan yang tak diketahui. Makin tepat definisi akan makin mudah pekerjaan pemodelan yang lain.
b. Nyatakan sistem kendala
Kuncinya adalah menentukan nilai-nilai sisi kanan dan kemudian menentukan koefisien teknologi yang cocok dan variabel keputusan yang diikut sertakan dalam kendala. Juga perhatikan jenis penyimpangan yang diperbolehkan dari
nilai RHS. Jika penyimpangan diperbolehkan dua arah, tempatkan hanya satu variabel simpangan yang tepat pada kendala yang bersangkutan.
c. Tentukan prioritas utama
Kuncinya adalah membuat urutan tujuan-tujuan. Biasanya urutan tujuan merupakan pernyataan preferensi individu. Jika persoalannya tidak memiliki urutan tujuan, lewati langkah ini dan kemudian kelangkah berikutnya.
d. Menentukan bobot
Disini kuncinya adalah membuat urutan didalam suatu tujuan tertentu, jika tidak diperlukan lewati langkah ini.
e. Nyatakan fungsi tujuan
Pilih variabel simpangan yang benar untuk dimasukkan dalam fungsi tujuan. Tambahkan prioritas dan bobot yang tepat jika diperlukan.
f. Nyatakan keperluan non-negatif
Langkah ini merupakan bagian resmi dari perumusan program tujuan ganda.
Prosedur formulasi ini merupakan salah satu pendekatan yang mungkinbermanfaat dalam perumusan model program tujuan ganda.
2. Model Tujuan Tunggal
Program tujuan ganda dan program linear memiliki hubungan. Sebuah program linear dapat diubah menjadi program tujuan ganda dengan model
tujuan tunggal.
Bentuk umum model tujuan tunggal: Suatu persamaan linear:
=
=1 Kendala:
=1
≤
atau≥
≥
0,
= 1,2,…
,
,
= 1,2,…
,
Diubah menjadi Program tujuan ganda: Min
+ +
−
Kendala
=1
+
−
−
+ =
=1
≤
atau≥
,
+,
−
≥
0,
= 1,2,…
,
,
= 1,2,…
,
3. Model banyak tujuan
Ada 3 jenis model banyak tujuan, yaitu: a. Tujuan banyak tanpa prioritas.
Bentuk umum: Min
+ +
−
=1 Kendala
=1
+
−
−
+ =
=1
≤
atau≥
,
−
,
+≥
0,
= 1,2,…
,
,
= 1,2,…
,
b. Tujuan banyak dengan prioritas. Model umum: Min
+ +
−
=1 Kendala
=1
+
−
−
+ =
=1
≤
atau≥
,
−
,
+≥
0,
= 1,2,…
,
,
= 1,2,…
,
c. Tujuan banyak dengan prioritas dan bobot.Model umum: Min
+,
++
,−
−
=1 Kendala
=1
+
−
−
+ =
=1
≤
atau≥
,
−
,
+≥
0,
= 1,2,…
,
,
= 1,2,…
,
2.2 TransportasiMetode transportasi adalah metode yang digunakan untuk mengatur distribusi dari sumber-sumber yang menyediakan produk yang sama, ke tempat-tempat yang membutuhkan produk tersebut secara optimal. (Fien Zulkarnaen,2004).
Ciri-ciri khusus metode transportasi
Terdapat sejumlah sumber dan sejumlah tujuan.
1. Jumlah yang didistribusikan dari setiap sumber dan yang diminta oleh setiap tujuan adalah tertentu.
2. Jumlah yang dikirim atau diangkut dari suatu sumber ke suatu tujuan sesuai dengan permintaan atau kapasitas sumber. Jumlah permintaan dan persediaan harus seimbang, dan apabila tidah seimbang maka harus
ditambahkan variabel dummy.
4. Jumlah variabel dasar
+−
1, di mana m jumlah sumber dan n jumlah tujuan. Apabila kurang maka harus di tambahkan variabel dasar dengan nilai nol.Model matematika untuk transportasi berdasarkan Nasendi dan Affendi (2005): Minimumkan:
=
=1
=1 Batasan:
=
;
= 1,2,…
,
=1
=
;
= 1,2,…
,
=1
≥
0 Keterangan:
= Variabel pengambil keputusan,produk yang diangkut dari sumber i ke tujuan j.
= Jumlah yang disediakan untuk diangkut (jumlah persediaan) di sumber i.
= Jumlah yang diminta untuk didatangkan (jumlah permintaan) di titik tujuan j.
= Ongkos pengangkutan per unit produk
. m = Jumlah sumber.n = Jumlah tujuan.
2.3 Himpunan Fuzzy
Dalam kehidupan sehari-hari sering digunakan himpunan tegas, yaitu himpunan yang terdefinisi secara tegas, dalam arti bahwa untuk setiap elemen dalam semestanya selalu dapat ditentukan secara tegas apakah merupakan anggota dari himpunan itu atau tidak. Dengan kata lain, terdapat batas yang tegas antara unsur-unsur yang merupakan anggota dan unsur-unsur yang tidak merupakan anggota dr suatu
0 1 0,5 0,25 25 35 40 45 50 55 65muda Setengah baya tua
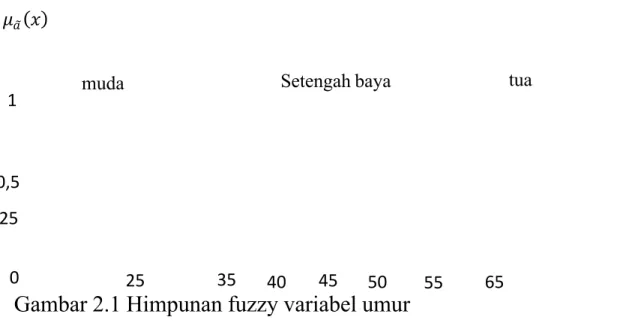
himpunan. Tetapi dalam kenyataannya tidak semua himpunan yang ada dalam kehidupan sehari-hari tidak semua terdefinisi secara tegas.. Misalnya himpunan orang kaya, mahasiswa pandai, tinggi badan, umur dan sebagainya. Pada himpunan umur, tidak dapat ditentukan secara tegas apakah seseorang muda, setengah baya atau tua, tanpa mendefinisikannya. Misalnya variabel umur dibagi menjadi 3 kategori yaitu: Muda umur < 35 tahun
Setengah baya 35 ≤ umur ≤ 55 tahun
Tua umur > 55 tahun.
Pemakaian himpunan tegas untuk menyatakan umur sangat tidak adil, karena adanya perubahan kecil saja sudah mengakibatkan kategori yang cukup signifikan.
Himpunan fuzzy digunakan untuk mengantisipasi hal tersebut. Seseorang dapat masuk dalam 2 himpunan yang berbeda, misalnya muda dan setengah baya, setengah baya dan tua, dan sebagainya. Seberapa besar eksistensinya dalam himpunan tersebut, dapat dilihat pada nilai keanggotaan nya.
Gambar 2.1 Himpunan fuzzy variabel umur
Pada gambar dapat dilihat bahwa seseorang yangberusia 40 tahun termasuk dalam himpunan muda dengan µmuda(40) = 0,25, namun dia juga termasuk dalam himpunan setengah baya dengan µstgahbaya(40) = 0,5. Begitu juga dengan seseorang yang berumur 50 tahun, termasuk dalam himpunan setengah baya dengan µstghbaya(50) = 0,25, namun dia juga termasuk dalam himpunan tua dengan µtua(50) = 0,5.
1
2
31
0
2.3.1 Fungsi Keanggotaan
Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaan atau derajat keanggotaan
yang memiliki interval antara 0 sampai 1. 1. Fungsi Keanggotaan Segitiga
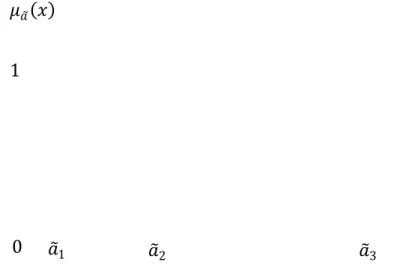
Sebuah fungsi anggota himpunan kabur dikatakan fungsi keanggotaan segitiga jika mempunyai tiga buah parameter, yaitu a
1, dana 2 a
3 adalah bilangan real dengan
1 <
2 <
3 dinyatakan sebagai berikut:
=−
1
(
2−
1), untuk
1≤≤
2
3−
3−
2
, untuk
2≤≤
30, untuk yang lain
Gambar berikut merupakan gambar bilangan fuzzy dengan fungsi keanggotaan segitiga
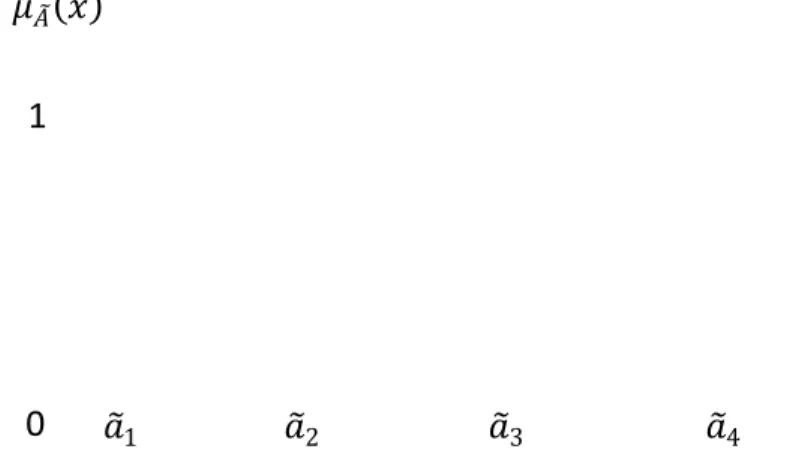
Gambar 2.2. Bilangan Fuzzy dengan Fungsi keanggotaan Segitiga 2. Fuzzy Keanggotaan Trapezoidal
Suatu bilangan fuzzy
= (
1,
,
3,
4) adalah trapezoidal, dinotasikan(
1,
2,
3,
4)di mana
1,
2,
3 dan
4 adalah bilangan real dan fungsi keanggotaan1
0
1
2
3
4
=−
1
(
2−
1), untuk
1≤≤
2 1, untuk
2≤≤
3
4−
4−
3
, untuk
3≤≤
40, untuk yang lain
Bilangan fuzzy trapezoidal direpresentasikan oleh 4 bilangan real yaitu
1,
2,
3,
4 di mana (
1 <
2 <
3 <
4). Lihat Gambar 2.3.Gambar 2.3 Bilangan Fuzzy dengan Fungsi keanggotaan Trapezoidal
2.3.2 Permasalahan Fuzzy transportasi
Model transportasi sangat penting bagi perencanaan produksi, parameter-parameter pada model transportasi adalah biaya, nilai persediaan, dan nilai permintaan. Pada prakteknya besar biaya, nilai permintaan dan jumlah persediaan pada suatu transportasi tidak dapat diketahui secara pasti. Apabila hal ini terjadi, maka salah satu solusinya dapat dicari dengan menggunakan operasi fuzzy.
Pada bagian ini, besarnya biaya ditetapkan secara eksak, sedangkan jumlah persediaan dan permintaan belim diketahui secara pasti. Ketidakjelasan ini bisa
disebabkan oleh kurangnya informasi atau kebijakan khusus dari suatu perusahaan. Pada masalah transportasi biasa dengan nilai persediaan dan permintaan yang bernilai integer akan selalu menghasilkan solusi yang juga bernilai integer. Pada fuzzy integer transportation problem, dibutuhkan suatu algoritma khusus untuk mendapatkan suatu nilai integer yang optimal.
Formulasi permasalahan fuzzy transportasi adalah sebagai berikut: Minimumkan:
=
=1
=1 =
1,
2,
3,
4
=
(
) Batasan:
≅
;
= 1,2,…
,
=1
≅
;
= 1,2,…
,
=1
≥
0 Keterangan:
= Variabel pengambil keputusan, jumlah produk yang diangkut dari sumber i ke tujuan j.
= Jumlah yang disediakan untuk diangkut (jumlah persediaan) di sumber i, berupa bilangan fuzzy.
= Jumlah yang diminta untuk didatangkan (jumlah permintaan) di titik tujuan j, berupa bilangan fuzzy.
= Ongkos pengangkutan per unit produk
m = Jumlah sumber.
n = Jumlah tujuan.
2.4 Pengenalan Software QM for Windows
Program QM for windows merupakan paket program komputer untuk menyelesaikan persoalan-persoalan metode kuantitatif, managemet sains atau riset operasi. QM for
windows merupakan gabungan dari program terdahulu DS dan POM for Windows, jadi jika dibandingkan dengan program POM for Windows, modul-modul yang tersedia di QM for Windows lebih banyak. Namun ada modul-modul yang hanya
tersedia di program POM for Windows atau hanya tersedia di program DS for Windows.
Program-program QM for Windows, DS for Windows dan POM for Windows, diterbitkan oleh Prentice Hall (www.prentice-hall.com), dan sebagian program merupakan bawaan dari beberapa buku terbitan Prentice Hall. Tampilan sementara
( splash) setelah program QM for Windows dijalankan tampak pada Ga mbar 2.1
Gambar 2.4 Tampilan sementara ( splash) dari program QM for Windows Setelah tampilan sementara, akan muncul tampilan seperti Gambar 2.2.
Gambar 2.6 Pilihan Modul yang tersedia pada QM for Windows
Gambar 2.7 Baris menu (menu bar ) sebelum dipilih Modul
Gambar 2.8 Baris Menu (menu bar ) setelah dipilih suatu Modul
Gambar 2.9 baris tool (tool bar ) sebelum dipilih Modul
Gambar 2.11 Ruang Instruksi