T : Waktu (s)
BAB 3
PERANCANGAN DAN PEMBUATAN
Rangkaian dan Pengujian Sistem Control Aliran Air dengan Mikrokontroler ATMega8535 Dan Pemrograman C ini memiliki beberapa rangkaian-rangkaian dan perancangannya serta sistem flowchartnya, diantaranya :
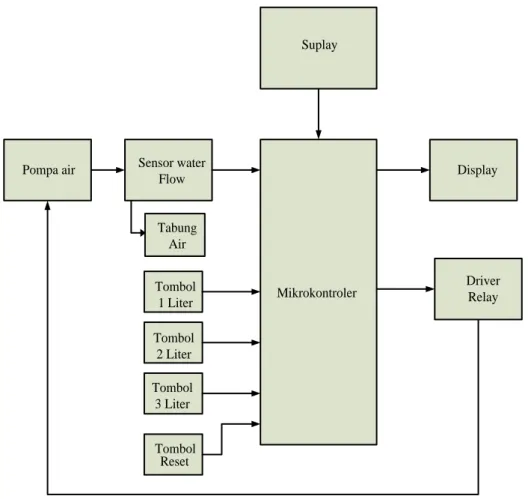
3.1. Diagram Blok Rangkaian
Mikrokontroler Suplay
Sensor water Flow
Pompa air Display
Driver Relay Tombol Reset Tombol 1 Liter Tombol 2 Liter Tombol 3 Liter Tabung Air
Gambar 3.1.Diagram Blok Sistem 3.1.1. Fungsi Tiap Blok
1. Blok mikrokontroller : Mengkonversi data dari sensor ke LCD. 2. Blok Sensor Water flow : Sebagai Sensor untuk memberikan pulsa ke
Mikrokontroler.
3. Blok Pompa air : Sebagai Pompa, untuk mengalirkan air ke Sensor.
4. Blok Display : Sebagai output tampilan dari Sensor. 5. Blok power supply : Sebagai penyedia tegangan ke sistem dan
Sensor.
6. Blok Relay : Sebagai saklar untuk menghidupkan dan mematikan pompa apabila inputan = output kecepatan kendaraan melebihi batas. 7. Blok tombol set1 : Sebagai inputan 1 aliran yang akan di
Pompa.
8. Blok tombol set2 :sebagai inputan 2 aliran yang akan di Pompa.
9. Blok tombol set3 :sebagai inputan 3 aliran yang akan di Pompa.
10.Blok Reset :untuk memberi nilai awal pada nilai liter.
3.2. Prinsip Kerja dari Rangkaian
Air dipompa melewati sensor aliran maka sensor akan mengeluarkan pulsa dari aliran dan pulsa yang dihasilkan dari sensor water flow diproses oleh
mikrokontroler dengan komunikasi counter dengan 514 counter = 1 liter. Setiap pulsa high memberikan 1 counter data dari sensor dikalibrasi dan ditampilkan pada LCD sesuai yang telah di set.
3.3. Rangkaian Power Supplay Adaptor ( PSA )
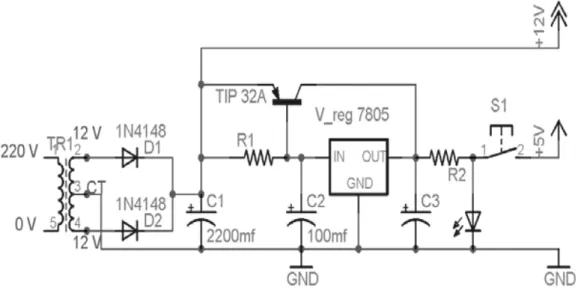
Rangkaian ini berfungsi untuk memberikan supply tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke relay. Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2.Rangkaian Power Supplay Adaptor (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya.LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak
akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.4. Rangkaian Mikrokontroller ATMega8535
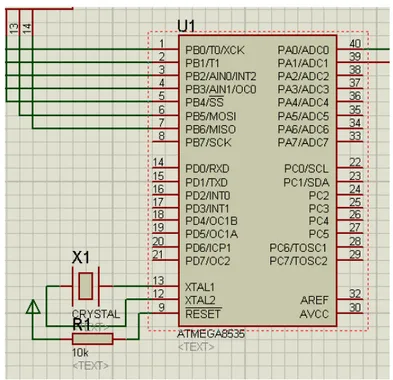
Rangkaian sistem minimum mikrokontroler ATMega8535 dapat dilihat pada gambar 3.3 di bawah ini :
Gambar 3.3. Rangkaian sistem minimum mikrokontroler ATMega8535 Dari gambar 3.3, Rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada.Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535.Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
Pin 12 dan 13 dihubungkan ke XTAL 8 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam
(aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke Jack 10 Pin header sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.5. Perancangan Rangkaian LCD (Liquid Crystal Display)
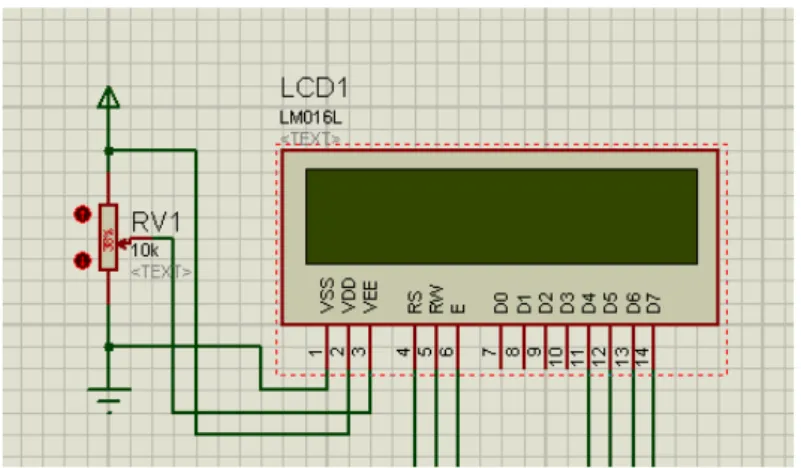
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16x2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan potensio sebesar 5 KΩ untuk mengatur kontras karakter yang tampil.Gambar 3.4 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Gambar 3.4.Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubung ke PC.0... PC.6, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai komunikan two slave dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega8535.
3.6. Perancangan sensor Water Flow
Pada rangkaian ini sensor terhubung ke PORTB.1, yaitu sebagai counter, sensor water flow akan menghasilakan pulsa apabila di aliri cairan, setiap pulsa yang masuk ke mikrokontroler akan dip proses dan di kalibrasi.
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect.Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais.
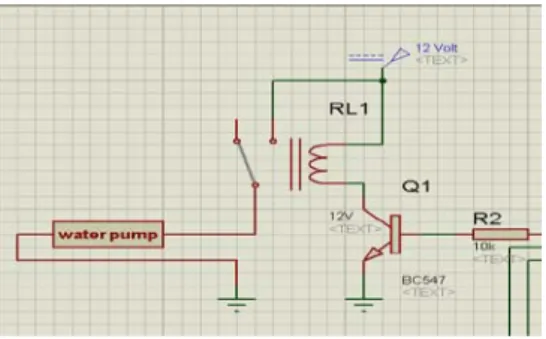
3.7. Perancangan Relay dan Pompa
Gambar 3.6.Relay dan Pompa
Komponen utama dari rangkaian ini adalah relay. Relay ini memisahkan tegangan rendah dari rangkaian dengan tegangan tinggi dari beban yang dihubungkan dengan sumber tegangan 12 volt DC
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negative relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik logam yang mengakibatkan saklar terhubung.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay digunakan transistor type PNP. Dari gambar dapat dilihat bahwa negative relay dihubungkan ke kolektor akan terhubung ke emitor dimana emitor langsung terrhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mwngakibatkan relay aktif. Sebaliknya jika transistor tidakaktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 9 volt, keadaan ini menyebabkan tidak aktifKumparan pada relay akan menghasilkam tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut .Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
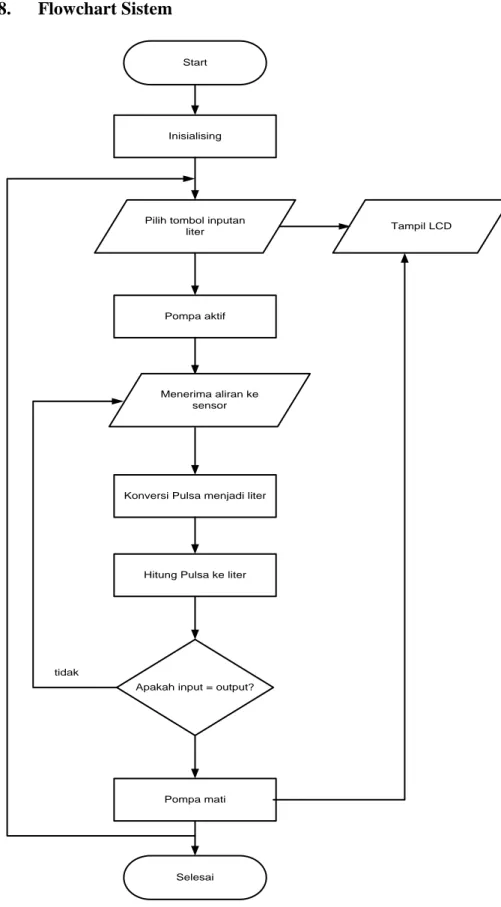
3.8. Flowchart Sistem
Start
Selesai Inisialising
Apakah input = output? Pilih tombol inputan
liter Tampil LCD
Pompa aktif
Konversi Pulsa menjadi liter
Hitung Pulsa ke liter
tidak
Pompa mati Menerima aliran ke
sensor
BAB 4
HASIL DAN PEMBAHASAN
Berikut ada beberapa Pengujian Rangkaian serta Program Lengkap dari Rangkaian dan Pengujian Sistem Kontrol Aliran Air dengan Mikrokontroler ATMega8535 dan Pemograman C, diantaranya adalah :
4.1. Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt.Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan tidak murni sebesar +9 Volt dan +12 Volt, tetapi +8.97Volt dan +12.03 Volt. Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak murni.Selain itu, tegangan jala-jala listrik yang digunakan tidak stabil.
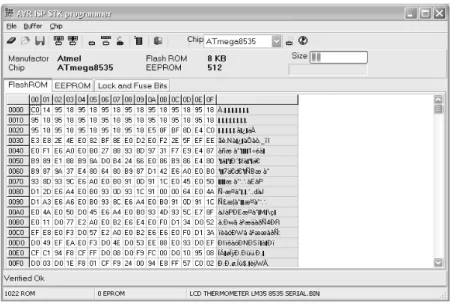
4.2. Pengujian Rangkaian Mikrokontroler ATMega8535
Karena pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega8535.
Gambar 4.1.Informasi Signature Mikrokontroler
ATMega menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.3. Interfacing LCD 2x16
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan. LCD dihubungkan langsung ke Port D dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.Display karakter pada LCD diatur oleh pin EN, RS dan RW: Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set ( high ) pada dua jalur kontrol yang lain RS dan RW. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika low (0), maka informasi pada bus data
akandituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
Berdasarkan keterangan di atas maka kita sudah dapat membuat progam untuk menampilkan karaker pada display LCD. Adapun program yang diisikan ke mikrokontroller untuk menampilkan karakter pada display LCD adalah sebagai berikut: #include <mega8535.h> #include <stdio.h> #include <delay.h> #include <alcd.h> void main(void) { PORTA=0xff; DDRA=0x0F; PORTB = 0X03; DDRB = 0X8F; PORTD.7 = 1; DDRD.7 = 0; lcd_init(16); lcd_gotoxy(0,0); lcd_putsf("Tes LCD"); }
diaktifkan, maka pada LCD akan menampilkan status sensor dan pemberitahuan apabila menerima sms .
4.4. Pengujian Rangkaian Sensor Water Flow
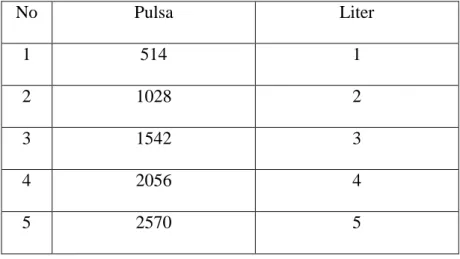
Pengujian rangkaian water flow sensor ini yaitu sensor akan menghasilkan pulsa setiap aliran yang di lewati sensor. Setip pulsa akan di kalibrasi dengan dalam satuan liter, setelah diuji pada sensor saya ini untuk mendapatkan pulsa dalam 1 liter, yaitu sensor menghasilkan pulsa sebanyak 514 pulsa, untuk mengkalibrasi dalam satuan liter, setiap pulsa di bagi dengan 514, maka akan dapat satuan liter.
Tabel 4.1. Tabel Pengujian Pulsa Water Flow Sensor
No Pulsa Liter 1 514 1 2 1028 2 3 1542 3 4 2056 4 5 2570 5
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect. Ketika air mengalir melalui pipa dalam sensor ini, maka akan mengenai rotor, dan membuatnya berputar. Kecepatan putar rotor akan berubah ketika kecepatan aliran air berubah pula. Output dari sensor hall-effect akan sebanding dengan pulsa yang digenerate rotor. Pulsa ini akan di hubungkan ke counter pada
mikrokontroler dengan 514 counter = 1 liter. Untuk mendapatkan perliter, setiap counter di bagi dengan 514.
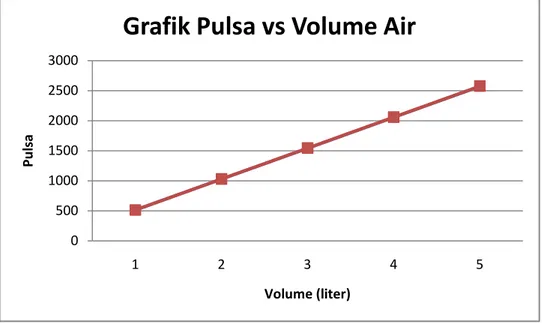
Gambar 4.2. Grafik Pulsa Sensor Terhadap Volume Air
Dari grafik perbandingan antara pulsa terhadap volume air, dapat disimpulkan bahwa pulsa keluaran dari sensor berbanding lurus terhadap volume air. Dengan katalain semakin besar pulsa yang dihasilkan, semakin besar juga volume air yang dialirkan. Demikian juga terhadap volume airnya. Semakin banyak volume airnya, maka semakin besar juga pulsa yang dihasilkan oleh sensornya.
4.5. Pengujian Rangkaian Relay dan Pompa Air
Pada pengujian rangkaian relay, yaitu dengan memberi tegangan pada basis transistor, yang di gunakan pada driver relay. Transistor pada rangkaian ini di gunakan sebagai swiching, artinya apabila basis di beri tegangan maka colektor
0 500 1000 1500 2000 2500 3000 1 2 3 4 5 Pu ls a Volume (liter)
pengujian relay. Yaitu memberikan tegangan pada basis transistor dengan mikrokontroler. #include <mega8535.h> #include <delay.h> void main(void) { DDRA=0x01; PORTA=0x01; DDRB=0x00; PORTB=0x00; DDRC=0x00; PORTC=0x00; DDRD=0x00; PORTD=0x00; while (1) { PORTB.0=1; delay_ms(1000); PORTB.0=0; delay_ms(1000); } }
Setelah Program di atas di download ke mikrokontroler, secara otomatis relay akan mengalami kondisi terbuka dan tertutup selama 1 detik.
4.6 Program Lengkap
Berikut adalah program yang bekerja dalam rangkaian yang dibuat. Apabila program dibawah di download ke mikrokontroler, maka rangkaian yang dibuat dapat bekerja dengan baik.
/****************************************************** *
This program was created by the CodeWizardAVR V3.12 Advanced Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com Project : Version : Date : 05/07/2015 Author : Company : Comments:
Chip type : ATmega8535 Program type : Application AVR Core Clock frequency: 8.000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 128
******************************************************* /
#include <stdlib.h> #define reset PIND.7 #define t1 PIND.4 #define t2 PIND.5 #define t3 PIND.6 #define pump PORTD.3
// Alphanumeric LCD functions #include <alcd.h>
unsigned char temp[8];
int data,set1=0, set2=0, set3=0, state=0, loop, waktu; float liter=0;
char buff[8];
// Declare your global variables here
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=Out Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (1<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=0 Bit2=P Bit1=P Bit0=P
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (1<<PORTA2) | (1<<PORTA1) | (1<<PORTA0);
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (1<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(1<<PORTC7) | (1<<PORTC6) | (1<<PORTC5) | (1<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (1<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTD=(1<<PORTD7) | (1<<PORTD6) | (1<<PORTD5) |
(1<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: T1 pin Falling Edge // Mode: Normal top=0xFFFF
// OC1A output: Disconnected // OC1B output: Disconnected // Noise Canceler: Off
// Input Capture on Falling Edge // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10); TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (1<<CS12) | (1<<CS11) | (0<<CS10); TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00; // Timer/Counter 2 initialization
// Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF
// OC2 output: Disconnected ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00; OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
// USART initialization // USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization // Analog Comparator: Off
// connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
SFIOR=(0<<ACME);
// ADC initialization // ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
// SPI initialization // SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
// Alphanumeric LCD initialization // Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu: // RS - PORTC Bit 0 // RD - PORTC Bit 1 // EN - PORTC Bit 2 // D4 - PORTC Bit 3 // D5 - PORTC Bit 4 // D6 - PORTC Bit 5 // D7 - PORTC Bit 6 // Characters/line: 16 lcd_init(16);
while (1) { if (reset==0){pump=0;state=0;set1=0;data=0,liter=0; loop=0;} while (state==0) { lcd_gotoxy(0,0); lcd_putsf("Pilih Pengisian"); delay_ms(50); if (t1==0){set1=1;state=1;} if (t2==0){set2=1;state=1;} if (t3==0){set3=1;state=1;} lcd_clear(); } while (set1==1) { data=TCNT1; liter=data*0.0019455;//0.0019455=1/514; ftoa(liter,2,temp); if (liter>=1) { pump=0; liter=1; } else { pump=1; loop++;
lcd_gotoxy(0,0); lcd_putsf("waktu :"); lcd_gotoxy(13,0); lcd_putsf("ms"); lcd_gotoxy(8,0); lcd_puts(buff); delay_ms(50); } ftoa(liter,2,temp); lcd_gotoxy(8,1); lcd_puts(temp); lcd_gotoxy(13,1); lcd_putsf("L"); lcd_gotoxy(0,1); lcd_putsf("Volume:"); if (reset==0){pump=0;state=0;set1=0;data=0,liter=0;TCNT1=0 ; loop=0;} } while (set2==1) { data=TCNT1; liter=data*0.0019455;//0.0019455=1/514; ftoa(liter,2,temp); if (liter>=2) { pump=0; liter=2; } else { pump=1;
loop++; waktu=loop*0.05464*100; itoa(waktu,buff); lcd_gotoxy(0,0); lcd_putsf("waktu :"); lcd_gotoxy(13,0); lcd_putsf("ms"); lcd_gotoxy(8,0); lcd_puts(buff); delay_ms(50); } ftoa(liter,2,temp); lcd_gotoxy(8,1); lcd_puts(temp); lcd_gotoxy(13,1); lcd_putsf("L"); lcd_gotoxy(0,1); lcd_putsf("Volume:"); if (reset==0){pump=0;state=0;set2=0;data=0,liter=0;TCNT1=0 ;loop=0;} } while (set3==1) { data=TCNT1; liter=data*0.0019455;//0.0019455=1/514; ftoa(liter,2,temp); if (liter>=3) { pump=0;
else { pump=1; loop++; waktu=loop*0.05464*100; itoa(waktu,buff); lcd_gotoxy(0,0); lcd_putsf("waktu :"); lcd_gotoxy(13,0); lcd_putsf("ms"); lcd_gotoxy(8,0); lcd_puts(buff); delay_ms(50); } ftoa(liter,3,temp); lcd_gotoxy(8,1); lcd_puts(temp); lcd_gotoxy(13,1); lcd_putsf("L"); lcd_gotoxy(0,1); lcd_putsf("Volume:"); if (reset==0){pump=0;state=0;set3=0;data=0,liter=0;TCNT1=0 ;loop=0;} } } }
4.7. Pengujian Alat
Pengujian ini dilakukan untuk mengukur unjuk kerja sistem dalam pengukuran laju aliran fluida. Pengujian dilakukan dengan mengalirkan air melalui water flow sensor YF-S201 dan selanjutnya ditampung dengan gelas ukur. Dengan asumsi bahwa laju aliran air oleh pompa dianggap konstan, maka referensi pengukuran laju aliran adalah volume air terukur pada gelas ukur dibagi dengan waktu yang diperlukan.Ketidak-pastian pengukuran volumetrik dan pengukuran waktu dianggap tidak signifikan dibanding ketidak-pastian alat ukur yang dibuat sehingga dapat diabaikan. Kedua asumsi ini diambil karenaterkadang terjadi eror pada chip mikrokontroler, sehingga dalam pembacaan program yangdimasukkan terjadi kesalahan. Namun hingga Tugas Akhir ini diselesaikan, perangkat ini belum dapat diselesaikan dengan baik.
4.8. Analisis Data Pengukuran Laju Aliran Air (Debit)
Debit air adalah kecepatan aliran zat cair per satuan waktu. Untuk dapat menemukan debit air maka kita harus mengetahui satuan ukuran volume dan satuan ukuran waktu terlebih dahulu, karena debit air berkaintan erat dengan satuan volume dan satuan waktu.
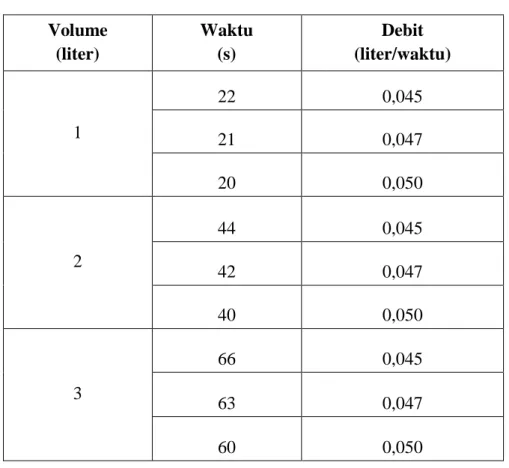
Tabel 4.2. Pengukuran Waktu Aliran Air Volume (liter) Waktu (s) Debit (liter/waktu) 1 22 0,045 21 0,047 20 0,050 2 44 0,045 42 0,047 40 0,050 3 66 0,045 63 0,047 60 0,050
Dari Table 4.2. dapat ditentukan debit dari tiap pengukuran dan debit rata-rata antara lain :
1. Untuk volume 1 liter
Pengukuran Pertama 1 v = s liter 22 1 = 0,045 l/ s Pengukuran Kedua 2 v = s liter 21 1 = 0,047 l/ s Pengukuran Ketiga 3 v = s liter 20 1 = 0,050 l/ s
Gambar 4.3. Grafik Pengukuran Debit Dalam 1 Liter
2. Untuk volume 2 liter
Pengukuran Pertama 4 v = s liter 44 2 = 0,045 l/ s Pengukuran Kedua 5 v = s liter 42 2 = 0,047 l/ s Pengukuran Ketiga 6 v = s liter 40 2 = 0,050 l/ s 19 19,5 20 20,5 21 21,5 22 22,5 0,045 0,047 0,050 wa ktu (s eko n) Debit (l/s)
Gambar 4.4. Grafik Pengukuran Debit Dalam 2 Liter
3. Untuk volume 3 liter
Pengukuran Pertama 7 v = s liter 66 3 = 0,045 l/ s Pengukuran Kedua 8 v = s liter 63 3 = 0,047 l/ s Pengukuran Ketiga 9 v = s liter 60 3 = 0,050 l/ s 38 39 40 41 42 43 44 45 0,045 0,047 0,050 W aktu (s eko n) Debit (l/s)
Gambar 4.5. Grafik Pengukuran Debit Dalam 3 Liter
Debit rata – rata dari pengukuran antara lain :
rata Vrata− = 9 9 8 7 6 5 4 3 2 1 v v v v v v v v v + + + + + + + + = 9 050 , 0 047 , 0 045 , 0 050 , 0 047 , 0 045 , 0 050 , 0 047 , 0 045 , 0 + + + + + + + + = 0,0473 l / s 57 58 59 60 61 62 63 64 65 66 67 0,045 0,047 0,050 W aktu (s eko n) Debit (l/s)
Tabel 4.3. Pengukuran Laju Air
Volume (Liter) Waktu (s) Debit (Liter/Waktu)
1 22 0,045 21 0,047 20 0,050 2 44 0,045 42 0,047 40 0,050 3 66 0,045 63 0,047 60 0,050
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam tugas proyek ini :
1. Water flow yang digunakan adalah tipe YF-S201 berfungsi sebagai sensor
hall effectuntuk pengukuran aliran air.
2. Mikrokontroller ATMega8535 untuk memproses data dari Water Flow sensor YF-S201dan ditampilkan ke Display LCD.
3. Hasil sensor menghasilkan debit air rata-rata 0,0473 liter/detik
5.2. Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu :
1. Diperlukan rancangan yang lebih teliti lagi pada alat agar rangkaian ini dapat bekerja lebih sempurna.
2. Agar debit air lebih maksimum maka diperlukan untuk mengubah sistem deteksi pada water flow sensor.