Model Kendali Berbasis Perilaku Pada Robot Berkaki Hexapod 3 DOF
Teks penuh
Gambar


Dokumen terkait
Pergerakan dari robot berdasarkan pada koordinat sumbu X, sumbu Y, dan sumbu Z, dimana robot akan berjalan menuju koordinat yang ditentukan apabila telah menerima inputan dari port
Prinsip kerja dari Prototipe Robot Line Follower Berkaki yaitu mengantar nampan makanan ke meja pelanggan dengan mengikuti garis sesuai nomor meja.Perangkat ini
Berdasarkan seluruh pengujian dan uraian laporan perancangan Robot line follower dengan kendali logika fuzzy, dapat diambil kesimpulan yang mungkin dapat dijadikan
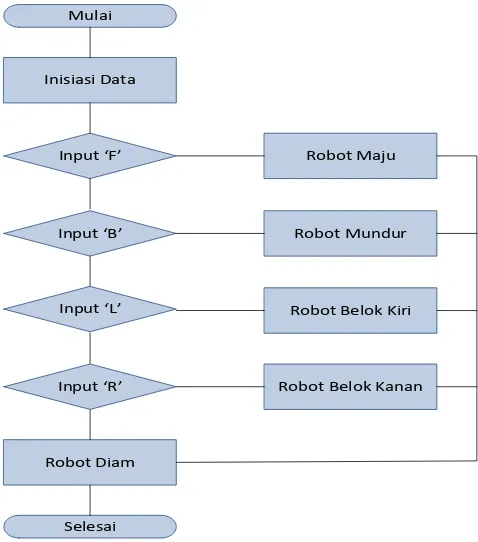
Pengujian ini dilakukan untuk melihat apakah pergerakan robot sesuai dengan Module program yang dibuat, jika Module program memanggil rutin program ‘kiri()’, maka
Dapat dilihat rute pergerakan robot sebelum menggunakan algoritma Fuzzy dan wall follower, jarak Robot dengan dinding bagian kanan belum beraturan , memiliki nilai
Dapat dilihat rute pergerakan robot sebelum menggunakan algoritma Fuzzy dan wall follower, jarak Robot dengan dinding bagian kanan belum beraturan , memiliki nilai error
Berdasarkan seluruh pengujian dan uraian laporan perancangan Robot line follower dengan kendali logika fuzzy, dapat diambil kesimpulan yang mungkin dapat dijadikan
Berdasarkan perancangan, pengujian, dan analisis yang telah dilakukan, maka dapat disimpulkan hal-hal yaitu dari hasil pengujian terhadap PLC (Programmable Logic
