SISTEM MONITORING MENGGUNAKAN ROBOT CCTV BERBASIS ARDUINO DENGAN SISTEM KENDALI SMARTPHONE ANDROID
DAN INTERNET
Yudi Adrian1, Minar Winda2, Amiruddin Tumanggor 3
Program Studi Manajemen Informatika, AMIK Multicom, Pematangsiantar Corresponding Author : Yudi Adrian
Abstract: Room monitoring system using CCTV cameras that were placed at specific points in a room. Then the catch of the camera will be displayed on the monitor located in another room. Room monitoring system conventional this has the disadvantage that in the case of the monitoring distance and image capture by camera CCTV limited because it can not move. The problem of image capture by camera CCTV is considered important because the results of the CCTV footage can provide information to users and can be evidence of acts of a crime. To overcome this, we need a development of technologies that can help overcome the shortcomings of the monitoring system of the conventional. The use of robots CCTV that can be controlled using a smartphone via the internet is expected to make the system monitoring room to be better. Robot CCTV is a robot that is assembled with the aim to be able to do the monitoring room that can move automatically and manually. This Robot move according to the wishes of the user-controlled through your android smartphone connected to the robot wirelessly via the internet. In this research, the robot CCTV is still a prototype and use the mikrokontorler Arduino Uno R3. The results obtained from the testing of this system is the robot can move in accordance with the user controls such as moving in automatic and manual mode and the camera can move horizontally and vertically.
Keywords: Arduino Uno R3, prototype, Robotic CCTV, android, wireless
Abstrak: Sistem monitoring ruangan menggunakan kamera CCTV yang ditempatkan pada titik-titik tertentu pada suatu ruangan. Kemudian hasil tangkapan kamera akan ditampilkan pada monitor yang terletak di ruangan lain. Sistem monitoring ruangan konvensional ini memiliki kelemahan yaitu dalam hal jarak pemantauan dan pengambilan gambar oleh kamera CCTV yang terbatas karena tidak dapat bergerak. Masalah pengambilan gambar oleh kamera CCTV dianggap penting karena hasil rekaman CCTV dapat memberikan informasi kepada penggunanya serta dapat menjadi alat bukti dari tindak suatu kejahatan. Untuk mengatasi hal tersebut, maka diperlukan suatu pengembangan teknologi yang dapat membantu mengatasi kekurangan dari sistem monitoring konvensional tersebut. Penggunaan robot CCTV yang dapat dikendalikan menggunakan smartphone melalui internet diharapkan dapat membuat sistem monitoring ruangan menjadi lebih baik. Robot CCTV adalah robot yang dirakit dengan tujuan untuk dapat melakukan pemantauan ruangan yang dapat bergerak secara otomatis dan manual. Robot ini bergerak sesuai keinginan pengguna yang dikendalikan melalui smartphone android yang terhubung ke robot secara wireless via internet. Pada penelitian ini robot CCTV masih bersifat prototype dan menggunakan mikrokontorler Arduino Uno R3. Hasil yang diperoleh dari pengujian sistem ini adalah robot dapat bergerak sesuai dengan kontrol pengguna seperti bergerak pada mode otomatis dan manual dan kamera dapat bergerak horizontal dan vertikal.
Kata kunci: Arduino Uno R3, prototype, Robot CCTV, android, wireless A. PENDAHULUAN
Camera CCTV stands for Closed Circuit Television. Today,CCTV camera used for surveillance in areas that require guard such as highways, estates and buildings such as housing, offices, factories, banks, shops, schools and others. In accordance with the
protect the employees or workers of the customer (customer) of a false accusation for example, exchange of goods that have been disabled.
In general, the system of monitoring a room using the CCTV camera that is placed on certain corners. Furthermore, the results of the catch of the cctv camera will be displayed on the monitor located in another room. This monitoring system has shortcomings in terms of distance monitoring is limited. Other shortcomings is the retrieval of images obtained from CCTV camera due to be placed on the position or a certain angle in a room. These deficiencies made it difficult uncovered a case of crime. Such as the case of coffee cyanide Mirna that is considered still not yet revealed the truth because of the limitations of shooting in such cases obstructed by certain objects.
With the absence of such limitations,there is a development of technologies that can help overcome the shortcomings of the CCTV cameras. One of them is with the use of the robot. Robot CCTV is a Robot that is equipped CCTV cameras that can be used as a monitoring tool of a room or location . Robot CCTV can replace the role of CCTV having limitations in terms of the distance of the monitoring, taking pictures and in terms of mobility.
B. METODE PENELITIAN
Metodologi penelitian yang digunakan pada penelitian ini adalah: Studi Literatur dimana pada tahap ini dilakukan pengumpulan bahan referensi yang berkaitan dengan robot CCTVdari buku-buku, artikel, makalah, jurnal, dan sumber lainnya. Analisis; pada tahap ini dilakukan analisis terhadap hasil studi literatur untuk mendapatkan pemahaman mengenairobot CCTV. Perancangan; pada tahap ini dilakukan perancangan perangkat keras danperangkat lunak robot. Implementasi; pada tahap ini dilakukan pembangunan model robot dan pengkodean perangkat lunak sesuai dengan kebutuhan akan sistem pemantauan ruangan menggunakan CCTV. Pengujian; pada tahap ini dilakukan pengujian terhadap robot yang dibangun dalam melakukan pemantauan runagan menggunakan kamera CCTV dan Penyusunan Laporan; pada tahap ini dilakukan penulisan laporan mengenai seluruh penelitian yang telah dilakukan.
C. HASIL DAN PEMBAHASAN Implementasi Sistem
Setelah dilakukan analisis dan perancangan pada bab sebelumnya, proses yang akan dilakukan berikutnya adalah implementasi sistem sesuai dengan perancangan yang telah dibuat. Perangkat elektronika dapat dilakukan dengan dua cara yaitu menggunakan papan protoboard atau menggunakan PCB. Printed Circuit Board (PCB) digunakan untuk mendapatkan rangkaian elektronika yang stabil, dengan menggunakan PCB pada sistem ini diharapkan perangkat tidak menimbulkan bug ke dalam sistem dan mempermudah pengerjaan dalam merangkai. Untuk itu pada implementasi dari sistem ini digunakan PCB. Kerangka robot CCTV diimplementasikan menggunakan bahan plastik keras (acrilyc) dengan ketebalan lebih kurang 5 mm. Bahan acrilyc dipilih karena bahannya yang cukup kuat, relatif ringan, mudah dalam pengerjaannnya serta mudah didapat. Secara keseluruhan bahan yang digunakan untuk membuat kerangka robot adalah acrilyc 5 mm dan baut dengan diameter 4 mm. Perangkat lunak diimplementasikan dengan bahasa pemrograman C (CodeVisionAVR dan arduino).
Implementasi Konstruksi Utama
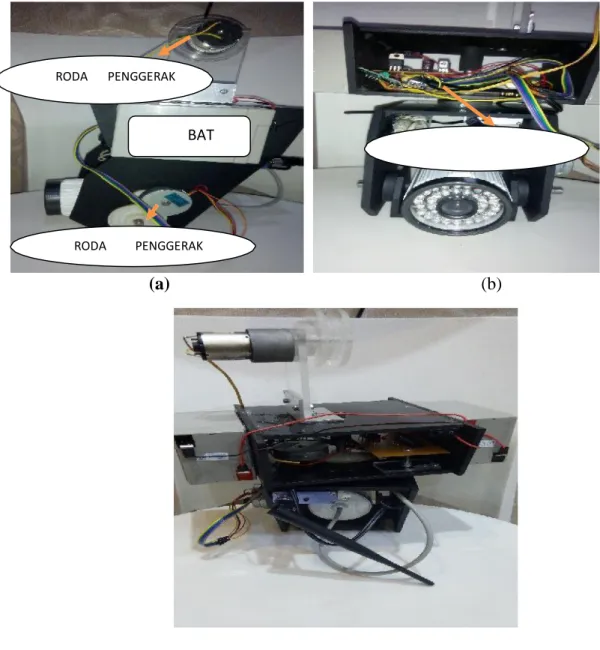
Kerangka robot dibuat dengan 2 tingkat, dimana tingkat pertama digunakan untuk menempatkan kamera, motor stepper, wireless receiver video. Kemudian pada tingkat kedua digunakan untuk menempatkan rangkaian robot seperti arduino, baterai, motor DC. Untuk ukuran kerangka utama dibuat dengan panjang 23 cm dan lebar 24 cm, serta tinggi
robot kurang lebih 34 cm. Berikut gambar tahap implementasi kerangka robot dapat dilihat pada Gambar 4.1.
(a) (b)
(c)
Gambar 4.1 Implementasi kerangka robot CCTV (a) Kerangka Bagian Samping (b) Kerangka Bagian Depan (c) Kerangka Bagian Belakang
Implementasi Konstruksi Aktuator
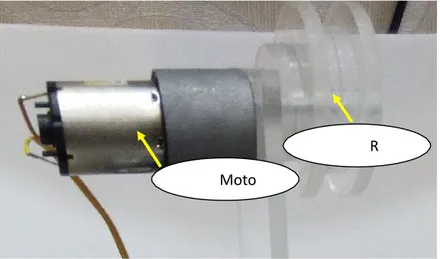
Robot CCTV menggunakan satu motor DC, dan 2 motor stepper sebagai aktuator yang digunakan sebagai penggerak robot dan kamera. Aktuator ini diimplementasikan menggunakan motor DC. Motor DC yang digunakan dapat bekerja dengan tegangan 12 volt. Untuk roda robot menggunakan bahan acrylic yang memiliki diameter 4,5 cm dan lebar 2 cm yang dapat dilihat pada Gambar 4.2.
KERANGKA UTAMA RODA PENGGERAK ROBOT BAT E R A I RODA PENGGERAK KAMERA
Mikrokont roler
Gambar 4.2 Implementasi Aktuator Gear
Implementasi Board Mikrokontroller (main board)
Rangkaian dasar yang digunakan untuk mengoperasikan sebuah mikrokontroler disebut sebagai rangkaian sistem minimum. Rangkaian sistem minimum terdiri dari rangkaian osilator (cystal), sistem reset dan catu daya. Berdasarkan rangkaian sistem minimum tersebut dibuat suatu board yang berfungsi untuk menggabungkan fungsi dasar dan fungsi pengendalian yaitu board mikrokontroller dapat dilihat pada Gambar 4.3.
Gambar 4.3 Implementasi Board Mikrokontroller
R o d a Moto r D C
Driver mot
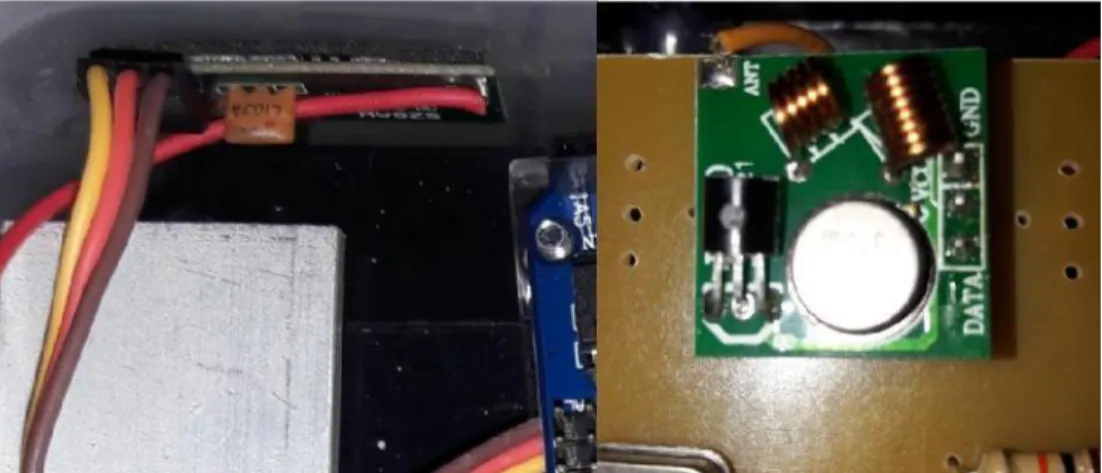
or L293D Implementasi Module FST4 dan CZS3
Module FST4 dan CZS3 berfungsi untuk melakukan koneksi antara arduino ke robot maupun sebaliknya dalam menerima perintah dari user. Implementasi Module dapat dilihat pada Gambar 4.4.
Gambar 4.4 Implementasi Module FST4 dan CZS3
Implementasi Board Driver Motor DC
IC L293D memiliki rangkaian dasar untuk beroperasi (sistem minimum) juga diimplementasikan dalam PCB yang disebut board driver motor DC. Board driver ini nantinya akan menerima masukan dari mikrokontroller dan memberikan respon terhadap motor DC. Layout driver motor dapat dilihat pada Gambar 4.5.
Implementasi Perangkat Lunak
Implementasi Module Program Mikrokontroler
Module program mikrokontroler dibuat menggunakan bahasa pemrogramman C dengan Arduino sebagai compiler. Program *.c dikompilasi menjadi file *.ino yang kemudian di-upload ke dalam mikrokontroler melalui di-uploader Arduino. Berikut gambar pembuatan program dengan Arduino seperti pada Gambar 4.6.
Gambar 4.6 Tampilan Program Arduino
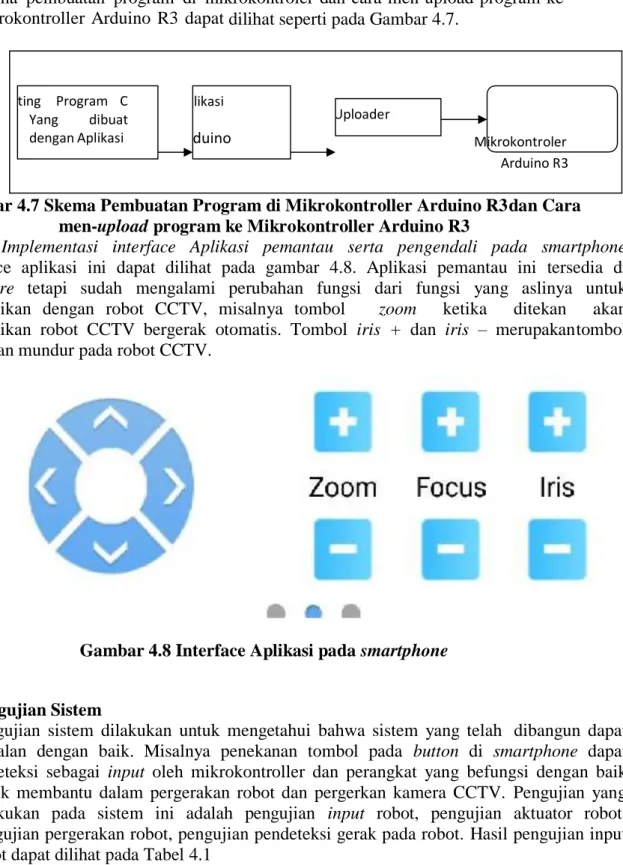
Skema Pembuatan Program di Mikrokontroller Arduino Uno R3 dan Cara mendownload Program ke Mikrokontroller Arduino Uno R3
Dapat kita lihat dari skema Gambar 4.7 bagaimana Program C yang dibuat untuk menggerakkan Robot dibuat di Komputer dengan menggunakan Aplikasi Arduino. Kemudian akan disimpan di Mikrokontroler Arduino R3, melalui uploader inilah kita akan menyalurkan listing program C ke mikrokontroler.
Mikrokontroler Arduino R3 Uploader Aplikasi Arduino Listing Program C Yang dibuat dengan Aplikasi
Skema pembuatan program di mikrokontroler dan cara men-upload program ke Mikrokontroller Arduino R3 dapat dilihat seperti pada Gambar 4.7.
Gambar 4.7 Skema Pembuatan Program di Mikrokontroller Arduino R3 dan Cara men-upload program ke Mikrokontroller Arduino R3
Implementasi interface Aplikasi pemantau serta pengendali pada smartphone Interface aplikasi ini dapat dilihat pada gambar 4.8. Aplikasi pemantau ini tersedia di playstore tetapi sudah mengalami perubahan fungsi dari fungsi yang aslinya untuk disesuaikan dengan robot CCTV, misalnya tombol zoom ketika ditekan akan menjadikan robot CCTV bergerak otomatis. Tombol iris + dan iris – merupakan tombol maju dan mundur pada robot CCTV.
Gambar 4.8 Interface Aplikasi pada smartphone
Pengujian Sistem
Pengujian sistem dilakukan untuk mengetahui bahwa sistem yang telah dibangun dapat berjalan dengan baik. Misalnya penekanan tombol pada button di smartphone dapat terdeteksi sebagai input oleh mikrokontroller dan perangkat yang befungsi dengan baik untuk membantu dalam pergerakan robot dan pergerkan kamera CCTV. Pengujian yang dilakukan pada sistem ini adalah pengujian input robot, pengujian aktuator robot, pengujian pergerakan robot, pengujian pendeteksi gerak pada robot. Hasil pengujian input robot dapat dilihat pada Tabel 4.1
Tabel 4.1 Hasil Pengujian Robot Secara Keseluruhan
Nama Pengujian
Jumlah pengujian dengan menekan tombol
5x 10x 15x
ROBOT
Kanan Berhasil Berhasil Berhasil Kiri Berhasil Berhasil Berhasil Bergerak
otomatis
Berhasil Berhasil Berhasil
KAMERA
Atas Berhasil Berhasil Berhasil Bawah Berhasil Berhasil Berhasil Kanan Berhasil Berhasil Berhasil Kiri Berhasil Berhasil Berhasil Pengujian Aktuator dan Pergerakan Robot
Pengujian aktuator robot menyangkut pada bagian penggerak motor dengan Module program. Pengujian ini dilakukan untuk melihat apakah pergerakan robot sesuai dengan Module program yang dibuat, jika Module program memanggil rutin program ‘kiri()’, maka robot CCTV akan bergerak ke sebelah kiri, dan menandakan tahap pengujian ini sudah berfungsi dengan baik. Pengujian ini dapat dilihat pada Gambar 4.9.
Gambar 4.9 Pengujian Aktuator Robot (a) Posisi Lurus (b) Posisi Kiri
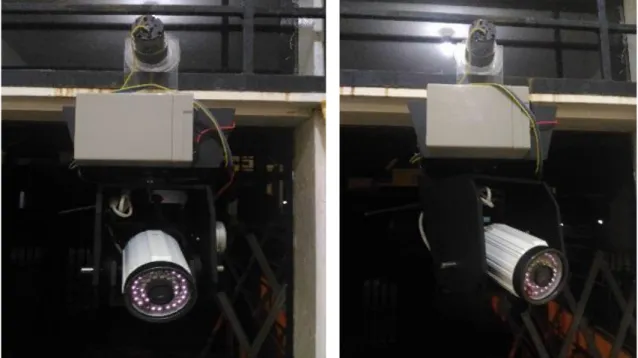
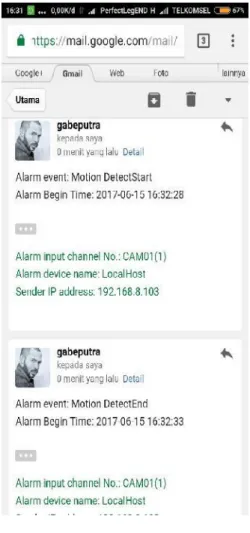
Pengujian Pendeteksi gerak
Pada pengujian ini akan dilihat apakah pendeteksi gerak pada robot CCTV sudah dapat digunakan untuk mendeteksi gerakan dan mengirim email peringatan ketika mendeteksi pergerakan suatu objek. Pendeteksi gerak pada robot harus dinyalakan terlebih dahulu pada DVR, pendeteksi gerakan ini dapat diatur sesuai dengan sensitivitas, area yang ingin dideteksi, jam, channel kamera. Jika terdeteksi adanya gerakan maka secara otomatis, email peringatan akan dikirim dari DVR ke email penerima. Gambar 4.10 merupakan email peringatan yang dikirim ketika terdeteksi gerakan dari suatu objek.
Gambar 4.10 Pengujian Pendeteksi gerak (a) Deteksi gerak berhasil (b) Email peringatan
Pengujian jarak maksimal dari koneksi internet antara smartphone dan robot CCTV Pengujian jarak ini dilakukan untuk mengetahui jarak maksimal yang dapat dicapai smartphone dan robot CCTV untuk tetap terhubung melalui koneksi internet. Pengujian ini dilakukan di dalam ruangan dengan kondisi modem wifi berada di dekat robot CCTV. Dapat dilihat pada Gambar 4.11, pada jarak 15 meter koneksi smartphone dan robot masih dapat terhubung. Pada jarak 20 meter, koneksi antara smartphone dan robot tidak dapat dijangkau.
Gambar 4.11 Grafik tingkat keberhasilan komunikasi kendali smartphone terhadap jarak
Pengujian kamera pada Robot
Kamera pada robot berfungsi untuk menampilkan pandangan didepan robot yang membantu user dalam melakukan monitoring terhadap suatu ruangan. Pada pengujian ini akan diperlihatkan tampilan dari padangan di depan robot melalui smartphone Android. Hasil pengujiannya dapat kita lihat pada Gambar 4.12.
Gambar 4.12 Pengujian kamera yang ditampilkan melalui Smartphone D. KESIMPULAN
Berdasarkan hasil Penelitian diatas maka dapat disimpulkan sebagai berikut :
1. Robot CCTV yang dikendalikan menggunakan smartphone Android berbasis arduino berhasil dirakit dengan baik.
2. Pada saat robot bergerak secara otomatis, maka Robot dapat bergerak secara otomatis selama 1 periode, dan robot juga dapat bergerak secara manual dengan menekan tombol arah seperti kanan, kiri melalui smartphone.
3. Robot akan bergerak untuk monitoring sesuai pengendalian dari pengguna dengan bantuan kamera pada robot yang ditampilkan pada smartphone.
Daftar Pustaka
Di Paola, D., Milella, A., Cicirelli, G., & Distante, A. (2010). An autonomous mobile robotic system for surveillance of indoor environments. International Journal of Advanced Robotic Systems, 7(1), 19-26.
Gargenta, M. 2011. Learning Android. United States of America: O‟Reilly Media. Grunberg, David. 2010. Development of an Autonomous Dancing Robot. International.
Journal of Hybrid Information Technology: Department of Electrical and Computer Engineering 2(3) : 33 - 44.
Hermawan S, Stephanus. 2011. Mudah Membuat Apliklasi Android. Andi : Yogyakarta.
Palembang.
Kumir,Sumat. 2012. Development and Research Implementation of Remote Object Monitoring Through Video Streaming Based on Android Mobile. International Journal of Internet Computing.
Kurniadi. 2007. Perancangan Robot Penghindar Dinding dengan menggunakan Sensor Infra Merah berbasis Mikrokontroler AT89S51. Skripsi. Universitas Sumatera Utara. Lee, H. T., Lin, W. C., & Huang, C. H. (2011). Indoor surveillance security robot with
a self-propelled patrolling vehicle. Journal of Robotics, 2011.
Leonardy, W. 2013. Aplikasi Mobile Robot Pemantau melalui internet dengan Mobile Phone berbasis Android. Jurnal : Teknik & Ilmu Komputer, vol.2, No.8.
Mengenal Arduino Uno R3. 2017. ecadio.com, Mikrokontroler ATmega 328. 2013. atmel.com,
Nughrahendi, F. 2014. Perancangan Sistem Kendali PD menggunakan Metode Tunning Logika Fuzzy pada Keseimbangan Ballbot. Skripsi. Universitas Gadjah Mada.
Nurmaini, Siti. 2012. Modeling of Mobile Robot System with Control Strategy Based on Type-2 Fuzzy Logic. International Journal of Information and Communication Technology Research. Computer Engineering Department, Faculty of Computer Science, Sriwijaya University. 3(2) : 235-241. ISSN: 2223- 4985.
Parker, A. J., McKinney Jr, E. C., Christianson, T. M., Thalheimer, R. J., Lau, S. F., Duncan, M., & Taylor, C. E. (2003). U.S. Patent No. 6,507,773. Washington, DC:U.S.Patent and Trademark Office.
Pendhari, D. P., & Jajulwar, K. K. (2012). Design of mobile robot for Indoor Monitoring System using SLAM Technique. International Journal of Computer Science & Applications (TIJCSA), 1(2).
Piyare,Rajeev and Ro Lee,Seong . 2013. Smart Home Control and Monitoring System using Smartphone. ICCA,ASTL Vol.24, pp. 83-86,SERSC.
Rahmansyah, M. F. 2014. Protipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroler ATMega32 Menggunakan Algoritma Fuzzy. Skripsi. Universitas Sumatera Utara.
Reddy, S. S., & Sameera, E. D. Indoor Human/Robot Monitoring System with PIR Sensory Fusion Using Wireless Communication.
Safaat, H. N. 2012. Pemrograman Aplikasi Mobile Dan Tablet PC Berbasis Android. Bandung: Informatika Bandung.
Suyadhi,Taufiq Dwi Septian. 2010. Buku Pintar Robotika Bagaimana Merancang Dan Membuat Robot Sendiri. Yogyakarta: Andi Offset.
Syahrul. 2011. Motor Stepper: Teknologi, Metoda dan Rangkaian Kontrol. Bandung: Jurnal Majalah Ilmiah Unikom. Vol. 6, No.2:187-202.
Waroh, A.P.Y. 2014. Analisa dan Simulasi Sistem Pengendalian Motor DC. (Online) http://ejournal.unsrat.ac.id/index.php/JIS/article/view/5935/5788
Yunifa & Arif, M. 2011. Hardware control pada robot pemindah bunga. Jurnal MATICS 4(4).