Elektro
PENS
Teknik Telekomunikasi Vol.2, No.1, 2013
Politeknik Elektronika Negeri Surabaya
Pembuatan Sistem
Pendeteksi Kecepatan Kendaraan untuk
Mengatasi Kemacetan Lalu Lintas sebagai Bagian Dari
Itelligent Transportation System
(ITS).
Muhammad Farid Ghozi, Mike Yuliana dan Rahardhita Widyatra Sudibyo
Program Studi D4 Teknik Telekomunikasi Departemen Teknik Elektro Politeknik Elektronika Negeri Surabaya Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111
Tel: (031) 594 7280; Fax: (031) 594 6114
Email:[email protected], [email protected], [email protected]
Abstrak
Kemacetan, bukan lagi sebuah masalah yang lumrah disebut-sebut di berbagai kota besar, termasuk Surabaya. Kemacetan adalah hal biasa yang sering ditemukan disetiap sudut jalan kota metropolitan. Di Surabaya, kemacetan sering sekali ditemui disepanjang jalan A. Yani, jalan Raya Kedung Baruk, dan jalur – jalur padat lainnya. Kemacetan ini terjadi karena semakin meningkatnya volume kendaraan bermotor yang ada di Surabaya. Berbagai macam solusi sudah dicoba untuk mengatasi kemacetan lalu lintas ini.
Pada penelitian ini dirancang sebuah system pendeteksi kecepatan dengan microcontroller AtMega16 alat ini bertujuan untuk mendapatkan suatu system yang nantinya bisa digunakan untuk mendeteksi kecepatan, yang kemudian dapat memutuskan kondisi suatu jalan sedang mengalami kemacetan atau tidak, seperti yang sering terjadi di Surabaya saat ini. Untuk masa yang akan datang, system ini sangat dibutuhkan, mengingat semakin banyaknya jalan yang mengalami kemacetan.
Dari penelitian ini dihasilkan sebuah system yang dapat mendeteksi kecepatan kendaraan dengan menggunakan proximity sensor dengan kecepatan maksimum yang dapat dideteksi sebesar 108 km/jam. Pemilihan yang tepat dalam penggunaan sensor akan berpengaruh terhadap hasil yang dicapai. Sensor jenis optical laser merupakan salah satu pilihan untuk mendapatkan hasil yang presisi. Dimana untuk peletakkan sensor dari pinggir jalan maksimal 30 cm dan dengan ketinggian ±80 cm. Jalan bisa dikatakan dalam kondisi macet, apabila kecepatan rata – rata kendaraan kurang dari 10 km/jam. Untuk pengolahan data dari microcontroller digunakan program Delphi yang digunakan untuk pembuatan server, program server berfungsi untuk menghitung kecepatan rata – rata dan penentuan kondisi jalan.
Kata kunci : Laser optical, Mikrokontroller, Delphi.
1. Pendahuluan
Perkembangan teknologi transportasi yang semakin hari semakin pesat menyebabkan pengguna alat-alat transportasi bebas memilih alat transportasi sesuai kondisi dan kebutuhan. Salah satu perkembangan teknologi transportasi mengacu pada kendaraan yang melaju di jalan raya, baik itu kendaraan bermotor tidak bermotor. Penelitian sebelumnya tentang deteksi kemacetan menggunakan mikrokontroler telah dilakukan oleh Anton Yuniarto, Jurusan Teknik Elektronika Universitas Muhamadiyah Surakarta[2]. Dimana pada penelitian tersebut
Pada penelitian sebelumnya untuk mengukur kecepatan kendaraan di jalan tol menggunakan mikrokontroller AT89S51 telah dilakukan oleh Drs. Bisman Perangin – angin, M. Eng.Sc, FMIPA Universitas Sumatra Utara[12].
Dimana pada penelitian tersebut, mikrokontroller menggunakan dua buah sensor yang berfungsi untuk mengaktifkan dan mematikan timer yang ada dalam mikrokontroller tersebut. Sensor 1 berfungsi untuk mengaktifkan timer mikrokontroller dan sensor 2 berfungsi untuk menghentikan timer mikrokontroller. Mikrokontroller akan membaca kecepatan kendaraan setiap 1 ms. Mikrokontroller juga berfungsi untuk mendeteksi kendaraan yang melebihi batas kecepatan dan menghitung jumlah kendaraan.
Pada tugas akhir ini akan dibuat alat untuk mendeteksi kemacetan lalulintas menggunakan mikrokontroler dengan mengacu pada kecepatan mobil yang dideteksi oleh proximity sensor semakin kecil kecepatan mobil, mengindikasikan bahwa lalulintas sedang padat.
2. Metode
.1 Skenario Implementasi Sistem
Pada perangkat keras, terdiri dari dua buah sensor yang terhubung melalui portA pin 1 dan Port A pin 2 microcontroller. Sensor yang digunakan yaitu proximity sensor yang berfungsi untuk mendeteksi kendaraan yang melewati sensor satu dan sensor dua. Ketika sensor satu aktif ,maka microcontroller mulai menyalakan timer. Timer akan berhenti ketika sensor kedua telah aktif. Waktu yang telah didiapatkan dari sensor 1 dan sensor 2 pada microcontroller akan digunakan untuk menghitung kecepatan kendaraan yang melewati kedua sensor. Kecepatan yang didapatkan selanjutnyadikirimkan keserverintelligent transportation system. Di dalam server data akan ditampung sampai sepuluh data kecepatan kendaraan sebelum dilakukan perhitungan lebih lanjut. Data yang telah disimpan di dalam server kemudian diolah untuk mendapatkan kecepatan rata – rata untuk menentukan kondisi jalan.
Gambar 1. Skenario implementasi dari keseluruhan sistem.
2.2 Perhitungan kecepatan kendaraan yang dideteksi oleh sensor dan perhitungan kecepatan rata - rata
Untuk menghitung kecepatan kendaraan yang bergerak, maka digunakan rumus :
V
=
s
∆ t
… … … …
..
(
1
)
Dimana :
V : Kecepatan kendaraan (m/s, km/h).
s : Jarak yang ditempuh oleh kendaraan(m, km).
Δt : total waktu yang dibutuhkan. Yang didapatkan dari t2 - t1 (s,h).
Misalkan untuk menempuh jarak 1 meter, sebuah mobil didapatkan t1 bernilai 0,1 detik dan t2 bernilai 0,3 detik. Dimana dengan mengacu pada persamaan 1, maka kita bisa menghitungnya sebagai berikut :
V
=
1
m
0.3
−
0.1
s
… …… … …
(
2
)
maka didapatkan nilai kecepatannya sebesar :
V
=
5
m
/
s
Pada tugas akhir ini, dikumpulkan sampai sebanyak sepuluh kecepatan kendaraan yang kemudian dihitung nilai rata – ratanya dengan menggunakan rumus:
Vavg
=
∑
n=1n=10
Vn
n
… … …… …
(
3
)
Dimana :
Vavg : Kecepatan rata – rata.
n : Banyaknya kecepatan yang akan dihitung. Vn : Nilai kecepatan ke-n.
Misalkan didapatkan 10 buah mobil dengan kecepatan berbeda – beda seperti berikut ini : V1 = 20.5 km/jam. V6 = 20.1 km/jam.
V2 = 20.4 km/jam. V7 = 20.9 km/jam.
V3 = 20.8 km/jam. V8 = 20.6 km/jam.
V4 = 20.2 km/jam. V9 = 20.3 km/jam.
V5 = 20.7 km/jam. V10 = 21.0 km/jam.
Maka untuk menghitung kecepatan rata – rata dari 10 mobil tersebut adalah :
Vavg
=
V
1
+
V
2
+
V
3
++
V
4
+
V
5
+
V
6
+
V
7
+
V
8
+
V
9
+
V
10
n
…
(
4
)
Vavg
=
20.5
+
20 .4
+
20.8
+
20.2
+
20 .7
+
20.1
+
20.9
+
20.6
+
20.3
+
21.0
10
…
(
5
)
Maka kecepatan rata – ratanya adalah : Vavg= 20.55 km/jam
2.3 Bahan dan Alat
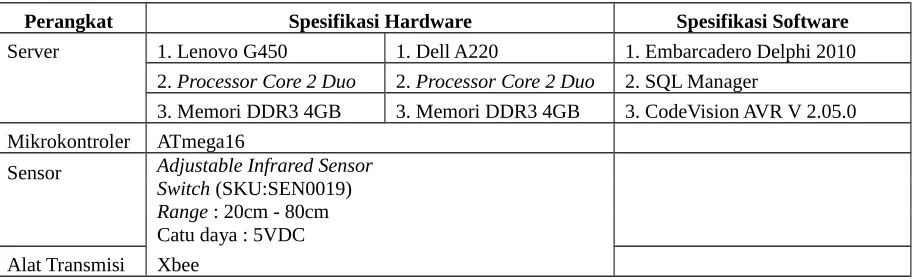
Perangkat yang diperlukan untuk pembuatan system ini adalah sebuah personal computer (PC), sebuah microcontroller yang telah dilengkapi dengan dua buah sensor, dan dua buah Xbee yang berfungsi untuk mengirimkan dan menerima data kecepatan. Spesifikasi dari semua perangkat tersebut seperti pada Tabel 1:
Tabel 1 Spesifikasi perangkat yang digunakan
Perangkat Spesifikasi Hardware Spesifikasi Software
Server 1. Lenovo G450 1. Dell A220 1. Embarcadero Delphi 2010 2. Processor Core 2 Duo 2. Processor Core 2 Duo 2. SQL Manager
3. Memori DDR3 4GB 3. Memori DDR3 4GB 3. CodeVision AVR V 2.05.0 Mikrokontroler ATmega16
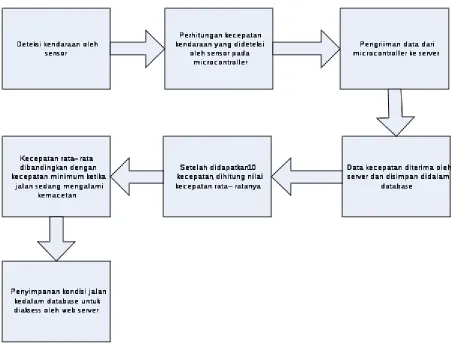
Gambar 2. Blok Diagram penentuan status jalan
Dengan menghitung kecepatan rata – rata dari sepuluh kendaraan yang melewati sensor, kemudian membandingkan kecepatan rata – rata tersebut dengan kecepatan rata – rata minimum kendaraan ketika jalan dalam kondisi macet. Apabila kecepatan rata – rata lebih kecil atau sama dengan kecepatan rata – rata minimum ketika jalan sedang macet, maka bisa ditentukan kalau jalan tersebut sedang mangalami kemacetan.
3. Hasil
Pengujian dilakukan pada jalan A. yani Surabaya tepatnya ditaman pelangi, dan Jalan raya kedung baruk 500 meter dari perempatan merr. Dari kedua jalan tersebut didapatkan hasil kecepatan rata – rata dibawah 10 km/jam ketika jalan sedang mengalami kemacetan. Sehingga dapat diambil keputusan bahwa apabila kecepatan rata – rata dari sepuluh kendaraan kurang dari 10 km/jam, maka bisa dikatakan bahwa jalan sedang dalam kondisi macet. Contoh pembacaan data oleh microcontroller, dapat dilihat pada Gambar 3.
Dari hasil pengujian untuk peletakan sensor dari pinggir jalan maksimal 30 cm dengan ketinggian ± 80 cm. ini dimaksudkan supaya sensor dapat mendeteksi semua kendaraan yang melewati sensor baik pagi, siang, dan malam hari. Jarak antara sensor dengan lampu lalulintas minimal 500 meter. Supaya sensor tidak terkena antrian dari lampu lalulintas. Mikrokontroller hanya mampu menghitung kecepatan kendaraan maksimal 108 km/jam. Ini karena mikrokontroller hanya memiliki ketelitian timer sampai dengan 10 ms.
4. Diskusi
Terdapat beberapa kelemahan dan kelebihan dari system yang dibuat. Kelebihan dari system ini yaitu dapat mendeteksi kecepatan secara otomatis dengan menggunakan sensor. System juga dapat menentukan kondisi jalan sedang mengalami kemacetan atau tidak. Selain mempunyai kelebihan, Dalam system ini juga terdapat beberapa kelemahan. Kelemahan pada system ini, hanya mampu mendeteksi kecepatan sampai dengan 108 km/jam. Jarak antara benda yang dideteksi dengan posisi sensor, hrus kurang dari 80 cm, karena sensor hanya mampu mendeteksi sampai dengan 80 cm. jarak antara server dan microcontroller idealnya kurang dari 2 meter, karena xbee hanya mampu mengirimkan data yang paling baik sejauh 175 cm secara line of sight (LOS). Oleh karena itu diperlukan beberapa pengembangan sebagai berikut :
1. Kecepatan yang dideteksi harus bisa diatas 108 km/jam. Sehingga dapat mendeteksi kecepatan diatas 108 km/jam.
2. Sensor yang digunakan mempunyai jarak maksimum lebih dari 200 cm, sehingga bisa mendeteksi kenderaan yang lewat menjadi lebih sensitif.
3. Untuk pengiriman, sebaiknya digunakan modem rakom, supaya jarak antara server dan pengukuran kecepatan dengan menggunakan microcontroller dapat diambil kesimpulan yaitu:
1. Microcontroller ini hanya mampu untuk mengukur kecepatan maksimum sampai dengan ± 108 km/jam. Dikarenakan microcontroller hanya mampu melakukan interval sampai ketelitian 10 ms.
2. Untuk dapat menambahkan kecepatan maksimum diatas 108 km/jam, maka jarak antara sensor satu dan sensor dua dapat dilebarkan
3. Semakin lebar jarak antara kedua sensor, maka nilai kecepatan yang didapatkan akan semakin tidak akurat apabila untuk diimplementasikan pada proyek akhir ini.
4. Kecepatan minimum kendaraan ketika sedang mengalami kemacetan yaitu 10 km/jam.
Ucapan terima kasih
Penulis mengucapkan terimakasih kepada Bapak/Ibu dosen pembimbing yang telah membimbing, memberikan saran dan pengetahuan yang terbaik pada penelitian ini. Terima kasih juga penulis sampaikan kepada seluruh staf PT. Data Integra dinamika yang telah banyak memberikan support.
Daftar Pustaka
[1]. Agfianto Eko Putra, “Tutorial PemrogramanMikrokontroler AVR denganWinAVR GCC (ATMega16/32/8535)”, 2010
[2]. Anton Yuniarto,”Deteksi Kepadatan Lalulintas Menggunakan Sensor Ultrasonik Pada Persimpangan Jalan Berbasis Mikrokontroler”, Surakarta, 2008
[3]. Ardi Winoto, “Mikrokontroler AVR ATmega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR”, Revisi, Informatika, Bandung, 2010
_page2.htm
[5]. http://iklimkarbon.com/2010/05/04/sistem-transportasi-intelijen-intelligent-transportation-systems-its/ [6]. http://www.dfrobot.com/wiki/index.php?title=
djustable_Infrared_Sensor_Switch_%28SKU:SEN0019% 29
[7]. http://technologination.blogspot.com/2011/11/tutorial-telemetri-24-ghz-dengan-x-bee.html
[8]. Sholihul Hadi, “MENGENAL MIKROKONTROLER AVR ATMega16”, IlmuKomputer.Com, 2003 -2008
[9]. http://kuliah.andifajar.com/sensor-proximity/ [10]. http://id.wikipedia.org/wiki/Radar_kecepatan
[11]. http://blog.ub.ac.id/vanino/2012/06/28/aplikasi-its-intelligent -transportation-system-pada-gps/