35
3.1 WAKTU DAN LOKASI PENELITIAN
Penelitian dilaksanakan pada bulan Maret 2011 sampai dengan Maret 2012. Kegiatan penelitian terdiri dari dua bagian, yaitu pembuatan alat dan uji coba alat. Pembuatan alat dilakukan di Workshop Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Sedangkan uji coba alat dilakukan di watertank Laboratorium Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor dan kolam renang Tirta Ayu Babakan Lio, Darmaga, Bogor.
3.2 ALAT DAN BAHAN
Alat dan bahan yang digunakan dalam pembuatan mini ROV mencakup perangkat keras (hardware) dan perangkat lunak (software). Alat yang digunakan dalam penelitian ini adalah laptop, Codevision AVR 2.05.0, Google Sketch Up 7, Delphi 7, bor listrik, obeng, solder listrik, multimeter digital, gerinda listrik, DT-I/O USB DT-I/O MODULE, PC-Link USBer, USB TV STICK, USB2.0 TV BOX, power supply 1A, Downloader K125R, gergaji besi, gunting, penggaris, dan busur derajat. Fungsi masing-masing alat dapat dilihat pada Lampiran 1. Bahan yang digunakan adalah DT-AVR Low Cost Micro System, ATmega32A, CMPS-10, Hitachi H48C 3-Axis Accelerometer, resistor 4,7 KΩ, EMS 5A H-Bridge, EMS 2A DUAL H-Bridge, adaptor 1 ampere, adaptor 2 ampere, adaptor 5 ampere, jack power supply, 1/3” Sony CCD IR Color Digital Camera, kepala kabel co axial, motor dari bilge pump 500 GPH (12VDC 2 A), motor dari bilge pump 750 GPH (12VDC 5A), baling-baling berdiameter 7 cm, akrilik, baut, konektor, pipa
stainless steel, pipa PVC, cat besi, kuas, pengencer cat, klem gantung, klem, kabel LAN, kabel AC, tali tis, amplas, lem epoxy, selotip pipa, dan lem PVC. Informasi lengkap mengenai bahan-bahan yang digunakan dapat dilihat ada Lampiran 2.
3.3 RANCANGAN ALAT
Mini ROV yang dikembangkan memiliki dimensi total panjang 80 cm, lebar 62,5 cm, dan tinggi 45 cm. Mini ROV dirancang agar dapat menyelam hingga kedalaman 10 meter. Mini ROV ini terdiri dari beberapa unit fungsional yang secara keseluruhan terpadu dalam satu mikrokontroler yaitu mikrokontroler ATmega32A. Gambar 30 merupakan sistem kerja tiap komponen yang terdapat dalam mini ROV dan tegangan sumber yang mungkin untuk dibuat.
Gambar 30. Desain sistem kerja tiap komponen pada mini ROV
Pada mini ROV ini terdapat “mata” yang menggunakan sensor kamera (dengan keluaran berupa video) yang berfungsi untuk melihatkan kondisi di dalam air. Pengukuran arah mini ROV menggunakan sensor kompas digital CMPS10 yang dapat menentukan arah hingga 360° dengan ketelitian 0,1°. Sudut pitch dan
roll juga menggunakan sensor CMPS10. Sudut pitch dan roll yang diperoleh
akan memiliki rentang nilai -90° – +90° dengan ketelitian 1,4°. Pada mini ROV Kompas Magnetik CMPS10 Sensor 3D-AXIS H48C KOMPUTER Kamera CCD TV TUNER Power supply 12 V 1 A Motor DC Modul driver motor Power supply 12 V 2 A USB TO SERIAL Motor DC Modul driver motor Power supply 12 V 5 A Kamera CCD TV TUNER Power supply 12 V 1 A Power Supply 12 V 1 A Mikrokontroler
PORT A PORT B PORT C PORT D
ini juga disematkan sensor accelerometer H48C untuk melihat gaya gravitasi yang bekerja pada 3 sumbu (sumbu X, sumbu Y, dan sumbu Z) dengan ketelitian 0,1 g. Sensor suhu digital DS1820 juga ditempatkan di dalam komparemen untuk meihat perubahan suhu di dalam kompartemen.
3.4 DESAIN KERJA
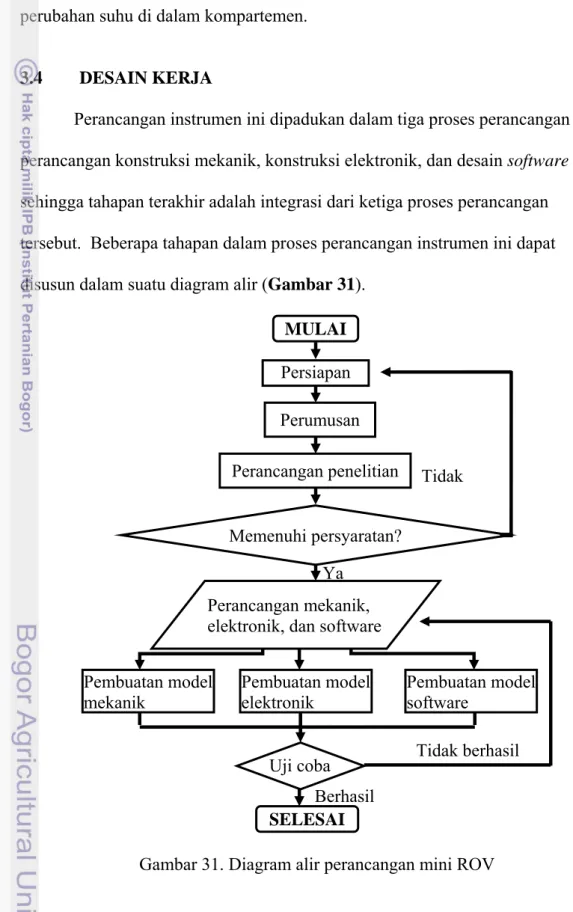
Perancangan instrumen ini dipadukan dalam tiga proses perancangan yaitu perancangan konstruksi mekanik, konstruksi elektronik, dan desain software sehingga tahapan terakhir adalah integrasi dari ketiga proses perancangan tersebut. Beberapa tahapan dalam proses perancangan instrumen ini dapat disusun dalam suatu diagram alir (Gambar 31).
Gambar 31. Diagram alir perancangan mini ROV Persiapan
Perumusan Perancangan penelitian
Memenuhi persyaratan?
Perancangan mekanik, elektronik, dan software
MULAI Tidak Ya Pembuatan model mekanik Pembuatan model elektronik Pembuatan model software
Uji coba Tidak berhasil Berhasil
3.5 PEMBUATAN DESAIN
Desain dan rancangan ROV dibuat dengan menggunakan software desain Google Sketch Up 7 (Gambar 32). Pembuatan desain ini dimaksudkan untuk memudahkan proses pembuatan konstruksi alat hingga tata letak komponen.
Gambar 32. Tampilan Google Sketch Up 7
3.6 RANCANG BANGUN PERANGKAT KERAS
Perangkat keras yang dibuat meliputi semua bagian yang menutupi
komponen elektronika sehingga tidak terjadi kerusakan pada komponen tersebut. Pembuatan perangkat keras disesuaikan dengan rancangan yang telah dibuat. Tahapan kerja yang dilakukan adalah sebagai berikut:
(1) Pembuatan kerangka,
(2) Pembuatan kompartemen elektronik, (3) Pembuatan kompartemen kamera.
3.6.1 Pembuatan kerangka
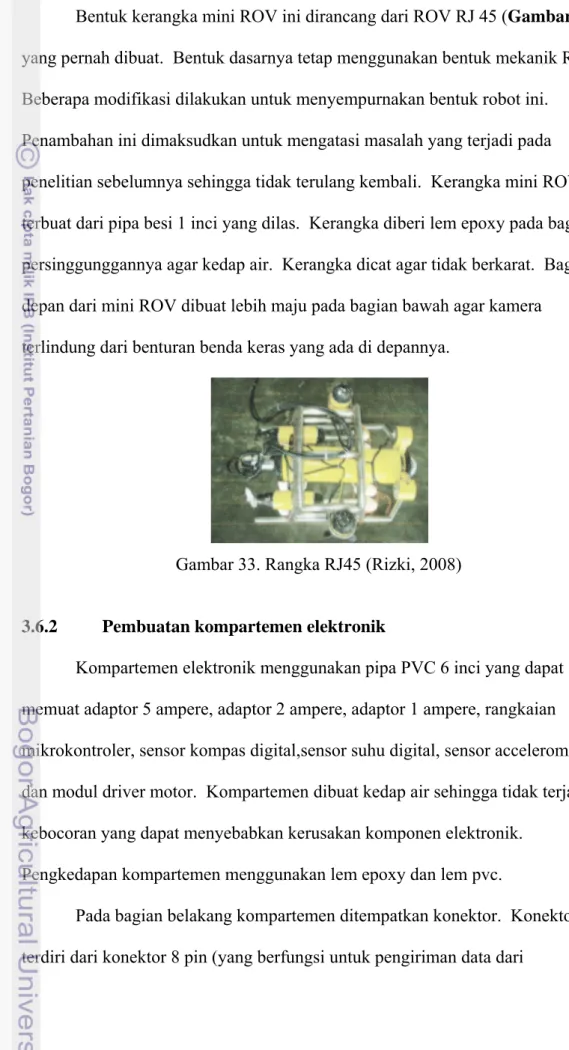
Bentuk kerangka mini ROV ini dirancang dari ROV RJ 45 (Gambar 33) yang pernah dibuat. Bentuk dasarnya tetap menggunakan bentuk mekanik RJ 45. Beberapa modifikasi dilakukan untuk menyempurnakan bentuk robot ini.
Penambahan ini dimaksudkan untuk mengatasi masalah yang terjadi pada penelitian sebelumnya sehingga tidak terulang kembali. Kerangka mini ROV terbuat dari pipa besi 1 inci yang dilas. Kerangka diberi lem epoxy pada bagian persinggunggannya agar kedap air. Kerangka dicat agar tidak berkarat. Bagian depan dari mini ROV dibuat lebih maju pada bagian bawah agar kamera
terlindung dari benturan benda keras yang ada di depannya.
Gambar 33. Rangka RJ45 (Rizki, 2008)
3.6.2 Pembuatan kompartemen elektronik
Kompartemen elektronik menggunakan pipa PVC 6 inci yang dapat memuat adaptor 5 ampere, adaptor 2 ampere, adaptor 1 ampere, rangkaian mikrokontroler, sensor kompas digital,sensor suhu digital, sensor accelerometer, dan modul driver motor. Kompartemen dibuat kedap air sehingga tidak terjadi kebocoran yang dapat menyebabkan kerusakan komponen elektronik.
Pengkedapan kompartemen menggunakan lem epoxy dan lem pvc.
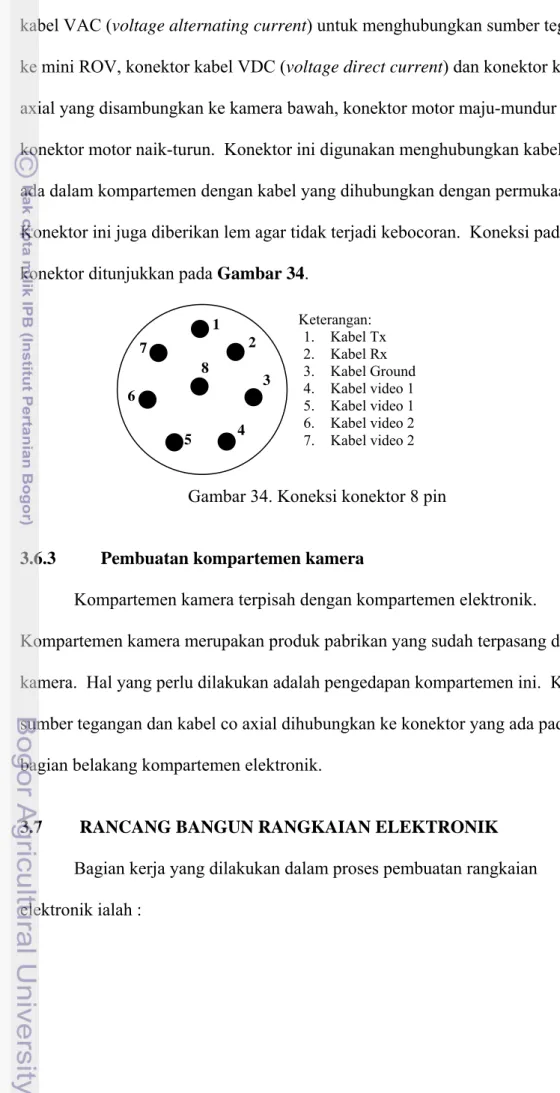
Pada bagian belakang kompartemen ditempatkan konektor. Konektor terdiri dari konektor 8 pin (yang berfungsi untuk pengiriman data dari
mikrokontroler dan pengiriman data video dari kamera 1 dan kamera 2), konektor kabel VAC (voltage alternating current) untuk menghubungkan sumber tegangan ke mini ROV, konektor kabel VDC (voltage direct current) dan konektor kabel co axial yang disambungkan ke kamera bawah, konektor motor maju-mundur dan konektor motor naik-turun. Konektor ini digunakan menghubungkan kabel yang ada dalam kompartemen dengan kabel yang dihubungkan dengan permukaan. Konektor ini juga diberikan lem agar tidak terjadi kebocoran. Koneksi pada konektor ditunjukkan pada Gambar 34.
Gambar 34. Koneksi konektor 8 pin
3.6.3 Pembuatan kompartemen kamera
Kompartemen kamera terpisah dengan kompartemen elektronik.
Kompartemen kamera merupakan produk pabrikan yang sudah terpasang dengan kamera. Hal yang perlu dilakukan adalah pengedapan kompartemen ini. Kabel sumber tegangan dan kabel co axial dihubungkan ke konektor yang ada pada bagian belakang kompartemen elektronik.
3.7 RANCANG BANGUN RANGKAIAN ELEKTRONIK
Bagian kerja yang dilakukan dalam proses pembuatan rangkaian elektronik ialah : Keterangan: 1. Kabel Tx 2. Kabel Rx 3. Kabel Ground 4. Kabel video 1 5. Kabel video 1 6. Kabel video 2 7. Kabel video 2 1 2 3 4 5 6 7 8
(1) Pembuatan skematik rangkaian, merupakan proses penyusunan rencana sambungan komponen dalam bentuk gambar;
(2) Penyolderan, dilakukan pada komponen pada PCB ataupun pada penyambungan antar komponen serta antar kabel.
Rangkaian elektronik yang dibuat sesuai dengan Gambar 30. Pembuatan robot bawah air ini menggunakan mikrokontroler ATmega32A. Datasheet mikrokontroler ini dapat dilihat pada Lampiran 3. Rangkaian sirkuit dasar mikrokontroler ATmega32A menggunakan modul buatan Innovative Electronics (Lampiran 4). Modul sudah memiliki jalur input/output 32 pin, jalur komunikasi serial RS232 dengan konektor RJ11, dan terdapat port untuk pemograman secara ISP. Modul ini memudahkan pengguna dalam menempatkan sambungan
komponen ke mikrokontroler.
Sensor CMPS10 yang digunakan merupakan modul (Gambar 35) yang diproduksi oleh Devantech Ltd. Modul ini memiliki 5 pin keluaran dimana pin 1 merupakan VCC dan pin 5 merupakan pin Ground. Pin yang dihubungkan ke mikrontroler ATmega32A adalah pin 2 (SCL) dan pin 3 (SDA). Pembacaan data CMPS10 dengan mikrokontroler ATmega32A menggunakan jenis komunikasi I2C. Komunikasi I2C menggunakan 2 pin pada salah satu PORT Mikrokontroler ATmega32A. Port yang digunakan adalah PortA pin 6 dan pin 7. Pin 6 berfungsi untuk jalur SDA dan pin 7 berfungsi untuk jalur SCL pada CMPS10. Pada penghubungan pin ini digunakan pull up resistor sebesar 4,7 KΩ yang berfungsi untuk membuat keadaan logika pada jalur DATA tetap pada kondisi HIGH ketika tidak ada sinyal dari ATmega32A. Informasi lebih lengkap dapat dilihat pada
Gambar 35. Modul kompas dan penghubungannya dengan pull up resistor
Sensor 3D Accelerometer yang digunakan adalah modul yang dibuat oleh Parallax Inc. Pin yang terhubung pada mikrokontroler ATmega32A adalah pin 1 (CLK), pin 2 (DIO), dan pin 5 (CS). Pin 1 terhubung pada PORT B pin 0, pin 2 pada PORT B pin 1, pin 5 terhubung pada pin 2 (Gambar 36). Lampiran 6 memberikan informasi jelas mengenai modul sensor accelerometer.
Gambar 36. Penghubungan pin H48c dengan pin mikrokontroler Sensor suhu yang digunakan adalah sensor suhu DS1820. Kaki DS1820 yang dihubungkan ke mikrokontroler adalah kaki Data (DQ). Pada jalur
mikrokontroler-DS1820 diberikan pull up resistor sebesar 4,7 kΩ (Gambar 37). Informasi lebih lengkap terdapat pada Lampiran 7.
Modul driver motor yang digunakan terdiri dari EMS 2A Dual H-Bridge
dan EMS 5A H-Brigde. Kedua modul merupakan produk Innovative Electronics. Manual kedua produk dapat dilihat pada Lampiran 8 dan Lampiran 9.
EMS 2A Dual H-Bridge digunakan sebagai saklar otomatis bagi 2 buah motor bilge pump 500 GPH (gallons per hour). Koneksi modul EMS 2A Dual H-Bridge dapat dilihat pada Gambar 38.
PORTB.0 PORTB.1
Pa adalah pin PORTC.3 dihubungk (M2IN2) k terminal y 2A), pin V pada kabe Gambar 37 Ga ada Interface n 1 (M1IN1) , pin 5 (VC kan pada mi ke PORTC. yang dihubu V MOT (terh el motor 1), 7. Penghubu ambar 38. K e Header 1 ( ) ke PORTC C), dan pin ikrokontrole 1, dan pin 4 ungkan adal hubung pad pin M1 OU ungan D182 Koneksi EM (J3), Pin ya C.6, pin 2 (M n 6 (GND). er ialah pin 4 (EN2) ke ah pin MGN da VCC ada UT2 (terhubu 20 dengan p S 2A Dual ang dihubun M1IN2) ke Pada Interf 1 (M2IN1) PORTC.2. ND (terhubu aptor 2A), p ung pada ka PO in mikrokon H-Bridge ngkan pada m PORTC.7, face Header ) ke PORTC Pada Powe ung pada G in M1 OUT abel motor ORTB.1 ntroler mikrokontr pin 4 (EN1 r 2 (J1), pin C.0, pin 2 er & Con (J2 Ground adap T1 (terhubun 1), pin M2 oler ) ke yang 2), ptor ng
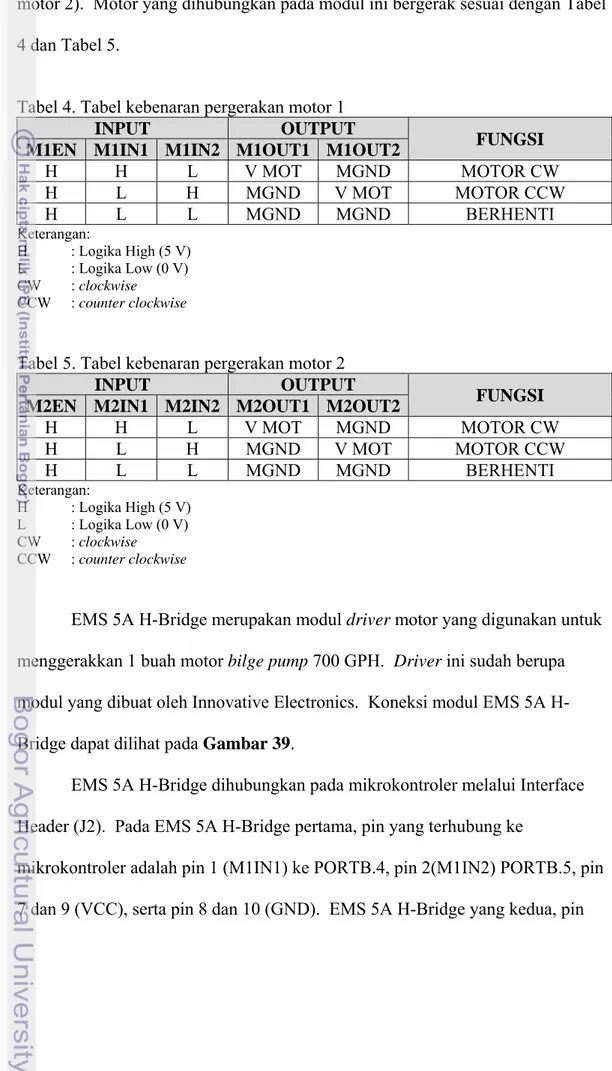
OUT1 (terhubung pada kabel motor 2), dan pin M2 OUT2 (terhubung pada kabel motor 2). Motor yang dihubungkan pada modul ini bergerak sesuai dengan Tabel 4 dan Tabel 5.
Tabel 4. Tabel kebenaran pergerakan motor 1
INPUT OUTPUT
FUNGSI
M1EN M1IN1 M1IN2 M1OUT1 M1OUT2
H H L V MOT MGND MOTOR CW H L H MGND V MOT MOTOR CCW H L L MGND MGND BERHENTI Keterangan: H : Logika High (5 V) L : Logika Low (0 V) CW : clockwise CCW : counter clockwise
Tabel 5. Tabel kebenaran pergerakan motor 2
INPUT OUTPUT
FUNGSI
M2EN M2IN1 M2IN2 M2OUT1 M2OUT2
H H L V MOT MGND MOTOR CW H L H MGND V MOT MOTOR CCW H L L MGND MGND BERHENTI Keterangan: H : Logika High (5 V) L : Logika Low (0 V) CW : clockwise CCW : counter clockwise
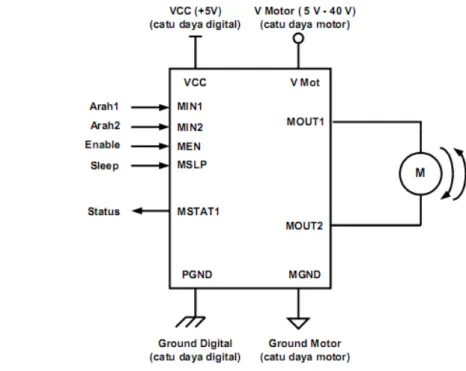
EMS 5A H-Bridge merupakan modul driver motor yang digunakan untuk menggerakkan 1 buah motor bilge pump 700 GPH. Driver ini sudah berupa modul yang dibuat oleh Innovative Electronics. Koneksi modul EMS 5A H-Bridge dapat dilihat pada Gambar 39.
EMS 5A H-Bridge dihubungkan pada mikrokontroler melalui Interface Header (J2). Pada EMS 5A H-Bridge pertama, pin yang terhubung ke
mikrokontroler adalah pin 1 (M1IN1) ke PORTB.4, pin 2(M1IN2) PORTB.5, pin 7 dan 9 (VCC), serta pin 8 dan 10 (GND). EMS 5A H-Bridge yang kedua, pin
yang terhubung ke mikrokontroler adalah pin 1 (M1IN1) ke PORTB.6, pin
2(M1IN2) PORTB.7, pin 7 dan 9 (VCC), serta pin 8 dan 10 (GND). Pin 4 (MEN) dihubungkan dengan pin VCC pada EMS 2A Dual H-Bridge.
Gambar 39. Koneksi modul EMS 5A H-Bridge
Pada Power & Con (J1), terminal yang dihubungkan adalah pin MGND (terhubung pada Ground adaptor 5A), pin V MOTOR (terhubung pada VCC adaptor 5A), pin MOUT1 (terhubung pada kabel motor1) dan pin MOUT2 (terhubung pada kabel motor1). Motor yang dihubungkan pada modul ini bergerak sesuai dengan Tabel 6.
Tabel 6. Tabel Kebenaran Pergerakan Motor
INPUT OUTPUT
FUNGSI
MEN MIN1 MIN2 MOUT1 MOUT2
H H L V MOT MGND MOTOR CW H L H MGND V MOT MOTOR CCW H L L MGND MGND BERHENTI Keterangan: H : Logika High (5 V) L : Logika Low (0 V) CW : clockwise CCW : counter clockwise
3.8 RANCANG BANGUN PERANGKAT LUNAK 3.8.1 Mikrokontroler
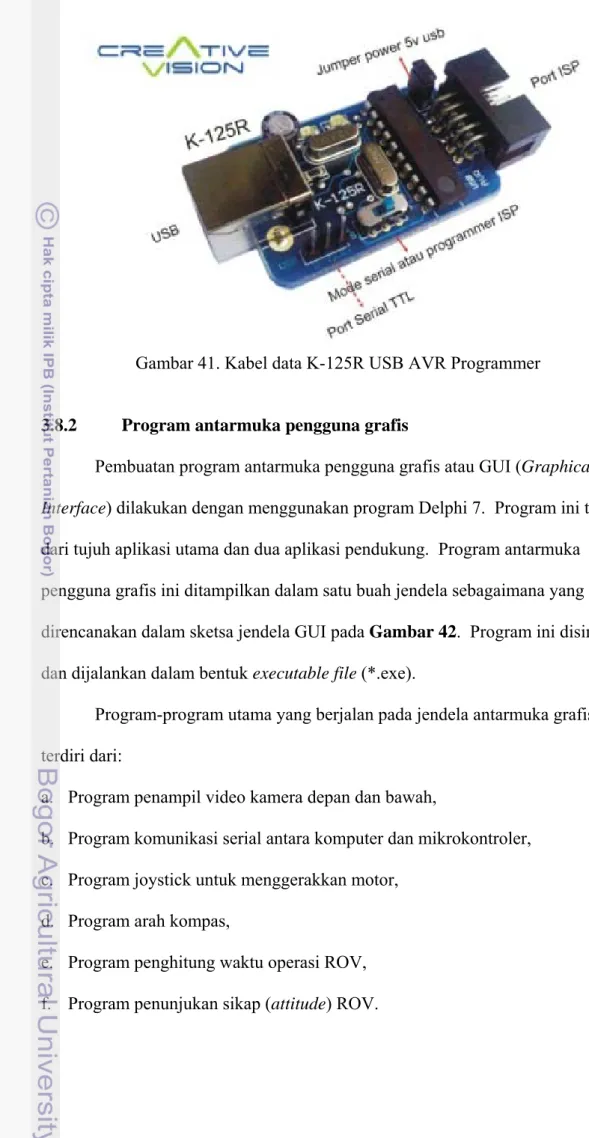
Perangkat lunak berkaitan dengan kinerja dari perangkat keras. Perangkat lunak pada sistem mikrokontroler disebut juga firmware. Bahasa pemograman yang digunakan ialah bahasa C. Compiler yang digunakan adalah Code Vision AVR C Compiler 2.05.0 (Gambar 40). Firmware yang telah dibuat diunduh menggunakan Atmel AVRProg (AVR910) dan kabel data K-125R USB AVR Programmer (Gambar 41). Pembuatan program mikrokontroler dilakukan dengan menulis kode program sesuai dengan diagram alir pada Lampiran 10. Setelah tidak ada kesalahan pada penyusunan program, kode akan dikompilasi (mengubah kode program dalam format *.hex) agar dapat diunduh pada mikrokontroler.
Gambar 41. Kabel data K-125R USB AVR Programmer
3.8.2 Program antarmuka pengguna grafis
Pembuatan program antarmuka pengguna grafis atau GUI (Graphical User
Interface) dilakukan dengan menggunakan program Delphi 7. Program ini terdiri
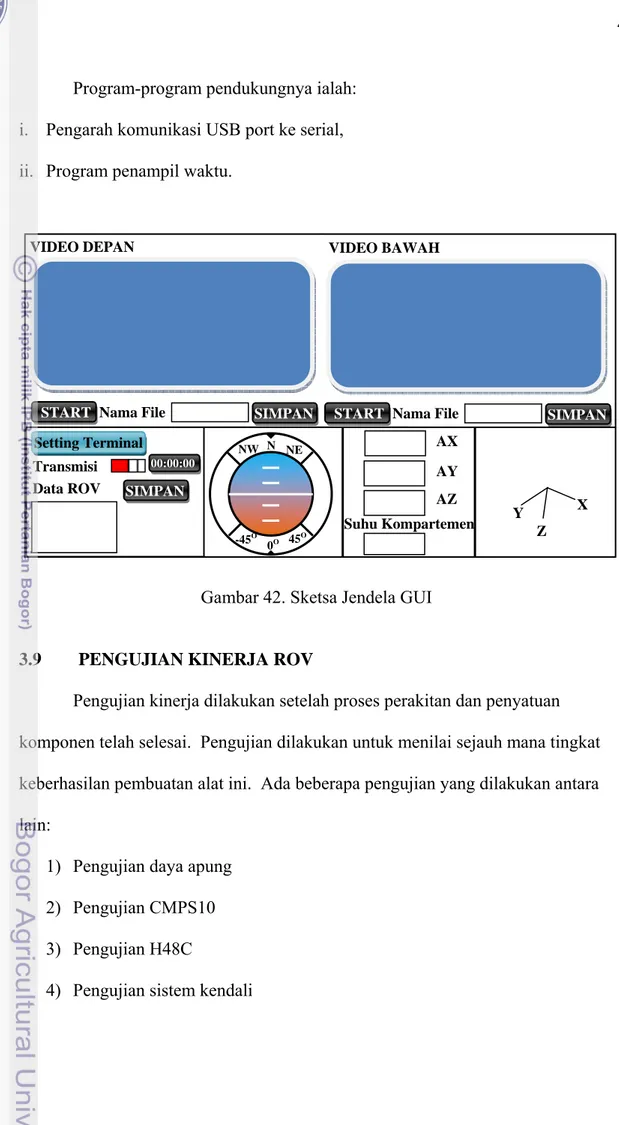
dari tujuh aplikasi utama dan dua aplikasi pendukung. Program antarmuka pengguna grafis ini ditampilkan dalam satu buah jendela sebagaimana yang direncanakan dalam sketsa jendela GUI pada Gambar 42. Program ini disimpan dan dijalankan dalam bentuk executable file (*.exe).
Program-program utama yang berjalan pada jendela antarmuka grafis terdiri dari:
a. Program penampil video kamera depan dan bawah,
b. Program komunikasi serial antara komputer dan mikrokontroler, c. Program joystick untuk menggerakkan motor,
d. Program arah kompas,
e. Program penghitung waktu operasi ROV, f. Program penunjukan sikap (attitude) ROV.
Program-program pendukungnya ialah: i. Pengarah komunikasi USB port ke serial, ii. Program penampil waktu.
Gambar 42. Sketsa Jendela GUI
3.9 PENGUJIAN KINERJA ROV
Pengujian kinerja dilakukan setelah proses perakitan dan penyatuan komponen telah selesai. Pengujian dilakukan untuk menilai sejauh mana tingkat keberhasilan pembuatan alat ini. Ada beberapa pengujian yang dilakukan antara lain:
1) Pengujian daya apung 2) Pengujian CMPS10 3) Pengujian H48C
4) Pengujian sistem kendali
VIDEO DEPAN VIDEO BAWAH
START Nama File SIMPAN START Nama File SIMPAN
Setting Terminal Transmisi
Data ROV SIMPAN
AX AY AZ N NW NE 0O -45O 45O 00:00:00 Suhu Kompartemen X Z Y
3.9.1 Pengujian daya apung
Pengujian dilakukan di water tank dengan memasukkan robot ke dalam air. Sebelum dilakukan pengujian di air, pengukuran massa robot dalam keadaan kosong dan dalam keadaan sudah terpasang komponen perlu dilakukan. Hal ini untuk mengetahui massa dari mini ROV.
Apabila saat pertama kali mini ROV diturunkan masih mengapung di permukaan air, maka penambahan pemberat (weight belt) dilakukan hingga mini ROV melayang di kolom air. Apabila saat pertama kali mini ROV diturunkan masih tenggelam, maka penambahan ruang apung dilakukan hingga mini ROV tersebut melayang di kolom air.
3.9.2 Pengujian CMPS10
Pengujian CMPS10 terdiri dari 3 bagian yaitu pengujian nilai arah (heading), nilai pitch dan nilai roll. Pengujian arah heading dilakukan dengan memutar mini ROV searah jarum jam hingga berputar 360°. Nilai arah yang keluar dari CMPS10 dibandingkan dengan penunjukkan arah dari kompas magnet. Pembacaan nilai arah dari CMPS10 harus tidak melebihi 2° dari nilai arah kompas magnet.
Pengujian pitch dilakukan dengan menggunakan bantuan busur derajat.
Pengujian dilakukan dengan menempatkan mini ROV pada bidang datar dimana nilai pitch yang keluar 0°. Peletakan busur derajat dapat dilihat pada Gambar 43. mini ROV diputar ke atas dengan maksimum putaran 90° dan diputar ke bawah dengan maksimum putaran 90°. Nilai yang keluar dibandingkan dengan penunjukan sudut dari busur derajat. Perbedaan nilai tidak boleh lebih dari 2°.
Pe Pengujian nilai roll y mini ROV dengan ma penunjuka 3.9.3 Pe tiap sumbu yang terter pada deng Gambar 4 ngujian roll n dilakukan yang keluar V diputar ke aksimum pu an sudut dar Gambar 4 Pengujian ngujian H4 unya. Peng ra pada Tab gan Tabel 7. 3. Peletakan l dilakukan dengan men 0°. Peletak kanan deng utaran 90°. ri busur dera 44. Peletaka n H48C 8C dilakuka gujian dilaku bel 7. Nilai . n busur dera dengan me nempatkan kan busur d gan maksim Nilai yang ajat. Perbed an busur der an dengan m ukan denga yang kelua ajat untuk p enggunakan mini ROV p erajat dapat mum putaran keluar diba daan nilai ti rajat untuk P melihat nila an memutar ar harus men pengukuran bantuan bu pada bidang t dilihat pad n 90° dan di andingkan d idak boleh l Pengukuran ai g-force ya mini ROV ndekati nila pitch usur derajat. g datar dima da Gambar iputar ke kir dengan lebih dari 2° n roll ang mengen pada posisi ai yang terte . ana 44. ri °. nai i era
Tabel 7. Nilai accelerometer pada tiap posisi
3.9.4 Pengujian sistem kendali
Pengujian sistem kendali memiliki beberapa poin terkait dengan keberhasilan pembuatan sistem kendali ini yaitu:
1) Sistem video kamera berjalan dengan baik,
2) Pergerakan joystick mampu menggerakkan motor dengan arah gerak yang tetap, motor bergerak sinkron, dan mampu merespon perubahan dengan baik,