BAB III
METODOLOGI PENELITIAN
3. 1. Tahapan Penelitian
Tahap penelitian yang dilakukan terdiri dari beberapa bagian, yaitu :
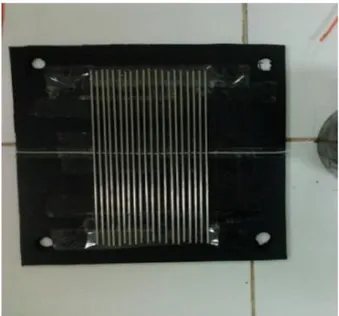
Perancangan sensor beban menggunakan serat optik ragam banyak (multimode) tanpa bagian pembungkus (jacket) sehingga bagian terluarnya adalah cladding. Serat optik ini diletakkan di atas karet dengan ukuran 25 x 25 cm dan di
Mulai
Perancangan Sensor Pengujian Kesetabilan Laser Pengujian variasi diameter
dan jarak kawat
Pengujian Validitas dan Reliabilitas Sensor Pengolahan Data dan
Analisa Statistik Penarikan Kesimpulan
Selesai
atasnya melintang kawat stainless dengan panjang 20 cm disusun secara periodik dan di atasnya ditutup lagi dengan karet seperti pada gambar 3.1. Pada sensor beban ini dibuat variasi diameter 1,6 mm dan 2,4 mm serta variasi jarak antar kawat 0,5 cm; 1,0 cm; 1,5 cm; dan 2,0 cm. Sehingga dari perancangan ini terdapat 8 kombinasi rancangan sensor beban.
Gambar 3.1. Rancangan Sensor Beban
Sensor beban dengan 8 kombinasi tersebut akan diuji untuk mengetahui pengaruh variasi diameter dan jarak kawat serta pengaruh interaksi diameter dan jarak terhadap respon sensor tersebut. Sebelumnya akan dilakukan pengujian kesetabilan laser karena hal ini berkaitan dengan respon sensor yang nantinya akan diuji.
Sistem instrumentasi pada penelitian ini seperti pada gambar 3.2 yaitu rangkaian laser yang dihubungkan dengan serat optik yang sudah dirancang menjadi sensor beban kemudian dihubungkan dengan transduser berupa photodetektor yang akan mendeteksi sinyal optik dan terhubung dengan modul DAQ (Data Acquisition) dengan resolusi 16-bit serta PC sebagai perangkat akuisisi data.
Gambar 3.2. Diagram Blok Penelitian
Laser Sensor Photodetektor DAQ PC
Pada penelitian ini lebih menekankan pada perancangan sensor beban berbasis serat optik dengan prinsip mikrobending yang kemudian didukung dengan beberapa pengujian untuk mendapatkan karakteristik dari sensor beban tersebut. Setelah perancangan sensor selesai maka dilakukan beberapa pengujian yaitu sebagai berikut :
3. 2. Pengujian Kesetabilan Laser
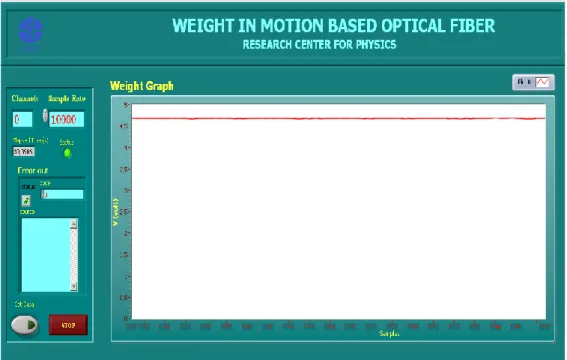
Pada pengujian ini digunakan laser dioda dengan panjang gelombang 1310 nm. Sumber optik tersebut dilewatkan pada sensor beban yang sudah dirancang sebelumnya tanpa diletakkan beban diatasnya. Sensor beban terhubung dengan photodetektor yang merupakan transducer untuk mengubah sinyal optik menjadi sinyal dalam bentuk beda tegangan listrik dengan satuan (Volt) yang akan diubah dalam bentuk sinyal digital dengan menggunakan antarmuka modul Data Translation DAQ (DT9816). Tegangan yang terukur ditampilkan dalam bentuk grafik, seperti pada tampilan PC dengan software Weight In Motion Based Optical Fiber buatan Pusat Penelitian Fisika LIPI, yang terlihat pada pada gambar 3.3. Setiap 30 detik data akan direkam dan indikator status akan menyala, dan pengujian dilakukan selama 17 jam.
Gambar 3.3. Software Weight In Motion Based Optical Fiber
Secara umum diagram alir pengujian setelah mengaktifkan software, yaitu :
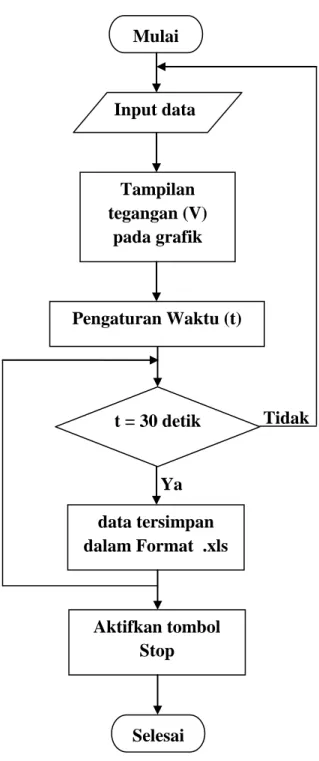
Gambar 3.4. Flowchart Pengujian Kesetabilan Laser
Keterangan gambar 3.4 :
1. Input data merupakan sinyal optik yaitu laser yang dilewatkan melalui serat optik yang kemudian sinyal optik ini dideteksi oleh photodetektor
Mulai
Tampilan tegangan (V)
pada grafik
Pengaturan Waktu (t)
t = 30 detik
data tersimpan dalam Format .xls
Tidak
Ya
Selesai Input data
Aktifkan tombol Stop
yang mengubah sinyal optik menjadi sinyal listrik yang kemudian diubah oleh modul DAQ menjadi sinyal digital.
2. Tampilan tegangan dalam bentuk grafik merupakan hasil dari modul DAQ dan tampilan tersebut seperti Gambar 3.3.
3. Data disimpan setiap 30 detik dan setiap 30 detik indikator status akan menyala menandakan data sudah tersimpan dan akan mengulangi proses penyimpanan kembali setiap 30 detik
4. Setelah mengaktifkan tombol Stop maka penyimpanan data akan selesai dan pengujian tersebut dilakukan selama 17 jam.
3. 3. Pengujian Pengaruh Diameter dan Jarak kawat terhadap Respon Sensor Beban
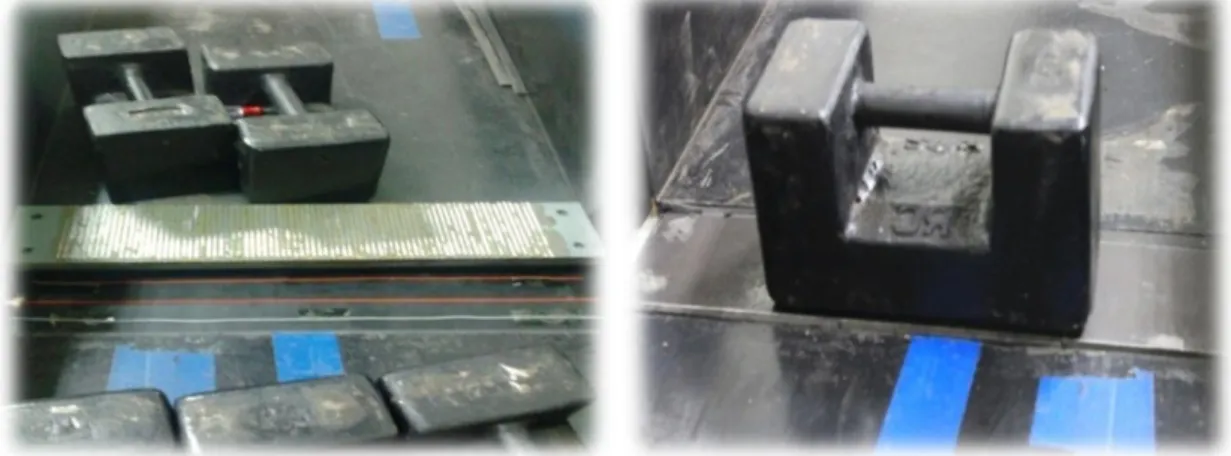
Pada penelitian ini dilihat pengaruh variasi ukuran diameter yaitu 1,6 mm dan 2,4 mm serta jarak antar kawat 0,5 cm; 1,0 cm; 1,5 cm; dan 2,0 cm setiap diberikan beban yang diletakkan di atasnya terhadap daya optik yang diterima photodetektor yang telah dikonversi menjadi beda tegangan listrik dengan satuan volt (V). Beban uji yang digunakan adalah sebesar 10 kg. Beban uji ini diletakkan terpusat diatas sensor beban seperti yang terlihat pada gambar 3.3. Beban uji berfungsi sebagai sumber gaya berupa tekanan yang akan ditransmisikan pada kawat melalui lapisan karet sehingga menyebabkan bending atau lekukan dalam hal ini mikrobending atau lekukan mikro yang terjadi pada serat optik.
Gambar 3.5. Beban Uji yang Diletakkan Terpusat Di atas Sensor Beban
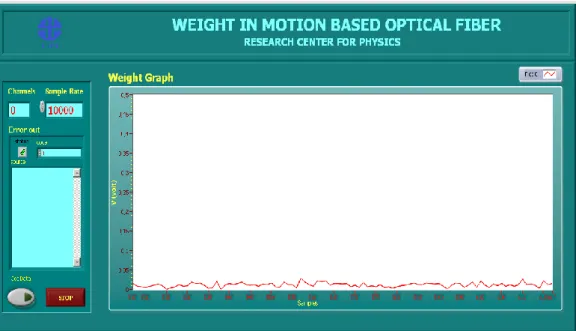
Mikrobending dapat mengubah arah transmisi sinyal optik pada serat optik menjadi berubah atau terjadinya pelemahan daya optik yang sering disebut sebagai rugi-rugi optik akibat mikrobending. Perubahan sinyal optik yang keluar dari sensor beban akan dideteksi oleh photodetektor dan kemudian diubah dalam bentuk beda tegangan listrik dengan satuan (Volt) yang akan diubah dalam bentuk sinyal digital dengan menggunakan antarmuka modul Data Translation DAQ (DT9816). Data pengukuran ditampilkan pada PC dengan software Weight In Motion Based Optical Fiber buatan Pusat Penelitian Fisika LIPI, seperti pada gambar 3.3. Untuk setiap data pengukuran dilakukan penyimpanan data (record data) dengan menekan tombol Get data pada software pada saat tegangan stabil.
Gambar 3.6. Software Weight In Motion Based Optical Fiber
Pada percobaan yang dilakukan ini terdapat 8 pengamatan yang merupakan kombinasi diameter dan jarak antar kawat dan setiap pengamatan dilakukan pengulangan sebanyak 10 kali. Hal ini dilakukan untuk mengetahui apakah variasi diameter dan jarak kawat berpengaruh secara signifikan terhadap respon sensor beban tersebut.
Secara umum diagram alir pengujian setelah mengaktifkan software, yaitu :
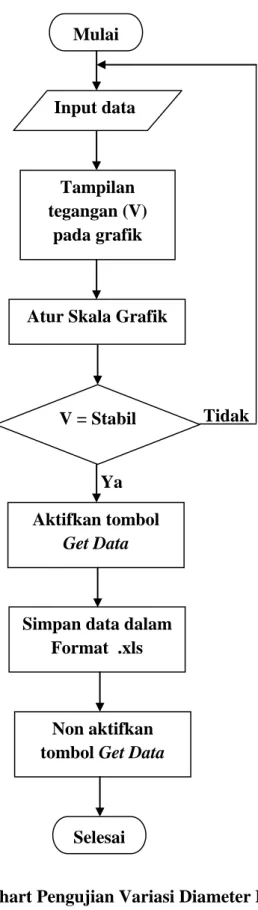
Gambar 3.7. Flowchart Pengujian Variasi Diameter Dan Jarak Kawat Mulai
Tampilan tegangan (V)
pada grafik
Atur Skala Grafik
V = Stabil
Aktifkan tombol Get Data
Tidak
Ya
Simpan data dalam Format .xls
Non aktifkan tombol Get Data
Selesai Input data
Keterangan gambar 3.7 :
1. Input data merupakan sinyal keluaran sensor beban yang sudah diproses oleh photodetektor dan modul DAQ
2. Tampilan tegangan dalam bentuk grafik pada gambar 3.6 merupakan selisih dari tegangan input seperti yang tampil pada PC pada gambar 3.3 dengan hasil dari pembacaan modul DAQ yang berasal dari photodetektor.
3. Atur skala grafik untuk melihat kesetabilan tegangannya.
4. Jika tegangan yang terlihat tidak stabil maka ulangi dengan mengangkat beban uji kemudian tunggu sampai tegangan kembali 0 Volt lalu letakkan kembali beban uji di atas sensor. Diamati kenaikan tegangan akibat tekanan dari beban uji.
5. Jika tegangan terlihat stabil maka aktifkan tombol Get Data seperti pada Gambar 3.1 kemudian data akan tersimpan dalam format .xls.
6. Non-aktifkan tombol Get Data untuk menyelesaikan penyimpanan data.
Pengujian di atas dilakukan beberapa kali untuk mengetahui keseragaman respon dari sensor beban yang diuji atau keseragaman output yang keluar dari sensor (repeatability).
3. 4. Pengujian Validitas dan Reliabilitas Sensor Beban
Validitas merupakan proses kalibrasi dari suatu sistem pengukuran. Dalam hal ini pengujian validitas diperlukan untuk mengetahui apakah sensor dapat mendeteksi beban dengan baik atau tidak. Sedangkan reliabilitas merupakan proses dimana sistem pengukuran dapat digunakan dalam waktu yang berbeda dengan nilai pengukuran yang sama. Sehingga dari hasil pengujian validitas dan reliabilitas sensor dapat diketahui karakteristik dari sensor tersebut untuk mendukung performa sensor tersebut.
Pengujian ini dilakukan dengan menggunakan peralatan serta prosedur yang sama seperti pada pengujian variasi diameter dan jarak kawat terhadap Respon Sensor Beban pada pengujian sebelumnya. Alat yang dibedakan yaitu sensor, sensor yang digunakan pada pengujian ini adalah sensor yang sudah dimodifikasi
yaitu sensor beban berbasis serat optik dengan prinsip mikrobending yang dibuat oleh Pusat Penelitian Fisika dengan menggunakan papan PVC ukuran 50 cm x 10 cm x 1 cm dan diberi kawat 2.4 mm dengan panjang 10 cm yang disusun secara periodik dengan jarak 0,5 cm, setelah itu diletakkan diatas serat optik yang diletakkan pada lapisan karet seperti gambar 3.8.
Gambar 3.8. Sensor untuk Pengujian Validitas dan Reliabilitas
Pengujian validitas sensor juga menggunakan laser stabil 1310 nm yang dilewatkan pada sensor. Pada sensor diletakkan beban dengan variasi 20 sampai 80 kg dengan interval 20 kg sebagai beban uji yang menyebabkan perubahan intensitas cahaya yang dideteksi oleh photodetektor dan diubah dalam bentuk beda tegangan dalam satuan Volt dan dengan menggunakan antarmuka modul Data Translation DAQ (DT9816) ditampilkan pada PC dengan software Weight In Motion Based Optical Fiber buatan Pusat Penelitian Fisika LIPI, seperti gambar 3.6 pada pengujian sebelumnya.
Untuk setiap data pengukuran dilakukan penyimpanan data (record data) dengan menekan tombol Get data pada software pada saat tegangan stabil. Setelah melakukan pengujian validitas sensor maka dilakukan reliabilitas sensor menggunakan variabel beban 20 kg dan 60 kg dengan pengulangan sebanyak 20 kali. Setelah melakukan penelitian maka data-data pengujian dianalisis dengan statistik menggunakan ANOVA.
BAB IV
HASIL DAN PEMBAHASAN
4. 1. Kesetabilan Laser
Kestabilan laser merupakan kunci yang harus diperhatikan ketika laser tersebut digunakan sebagai sumber cahaya dalam sebuah sensor maupun instrument optik karena stabilitas laser sangat mempengaruh kepekaan terhadap beberapa parameter sensor yang menggunakan laser sebagai komponen utamanya.
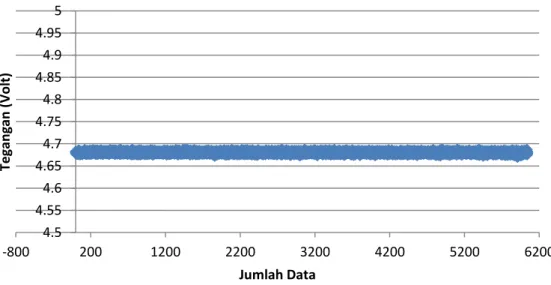
Dari hasil pengujian didapat hasil seperti gambar 4.1 kesetabilan laser dapat terlihat dari tegangan terukur yang diambil selama kurang lebih 17 jam yang dikeluarkan oleh photodetektor.
Gambar 4.1. Grafik Kesetabilan Laser
Dari trend grafik terlihat bahwa tegangan sama dari setiap data menunjukkan kesetabilan, hal ini dapat dibuktikan secara signifikan dengan uji T menggunakan software statistik. Hasil tersebut ditunjukkan pada tabel 4.1. Dari Hasil Uji T, didapat korelasi data atau seluruh data tegangan memiliki hubungan yang erat
4.5 4.55 4.6 4.65 4.7 4.75 4.8 4.85 4.9 4.95 5
-800 200 1200 2200 3200 4200 5200 6200
Tegangan (Volt)
Jumlah Data
ditandai dari hasil signifikan 0.000 < α = 0.05, dari hasil ini menunjukkan bahwa laser dalam keadaan stabil.
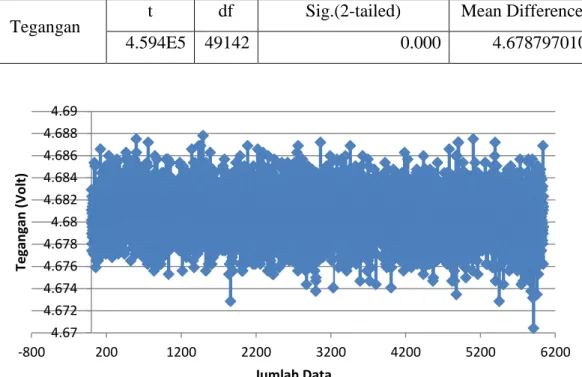
Tabel 4.1. Uji T untuk Kesetabilan Laser
Tegangan t df Sig.(2-tailed) Mean Difference
4.594E5 49142 0.000 4.678797010
Gambar 4.2. Grafik Kesetabilan Fluktuasi Laser
Dari gambar 4.2. terlihat dari tren grafik tegangan yang keluar dari photodetektor tetap mengalami fluktuasi yaitu naik turunnya tegangan akibat adanya noise atau gangguan dan dapat direpresentasikan secara matematis, yaitu :
Fluktuasi = nilai maksimum – nilai minimum
Nilai maksimum tegangan sebesar 4.68811 Volt dan nilai minimum sebesar 4.667664 Volt maka fluktuasi sebesar 0.020446 Volt. Untuk mengetahui kesetabilan laser, perlu diketahui persentase fluktuasi terhadap tegangan rata-rata yang secara matematis didapatkan dari rumus :
Didapatkan hasil persentase fluktuasi adalah 0.44 % dari nilai rata-rata yang besarnya 4.678797. Hasil ini sesuai standart yang tidak melebihi 2 % maka laser memenuhi kesetabilan untuk digunakan sebagai sumber cahaya pada sensor beban serat optik.
4.67 4.672 4.674 4.676 4.678 4.68 4.682 4.684 4.686 4.688 4.69
-800 200 1200 2200 3200 4200 5200 6200
Tegangan (Volt)
Jumlah Data
4. 2. Pengujian Variasi Diameter dan Jarak Kawat terhadap Respon Sensor Beban
Prinsip mikrobending (pembengkokan mikro) dapat dimanfaatkan untuk membuat rancangan sensor beban terutama aplikasi sensor beban kendaraan yang dalam hal ini dibuktikan dari hasil pengujian pengaruh variasi dimater dan jarak kawat yang disusun secara periodik diatas serat optik. Dengan prinsip ini diketahui bahwa sensor serat optik memberikan respon akibat lekukan-lekukan periodik karena lekukan-lekukan tersebut membuat intensitas cahaya yang ditrasmisikan di dalam serat berkurang sehingga sinyal optik yang diterima photodetektor berubah sesuai dengan besar dan susunan lekukan pada serat optik.
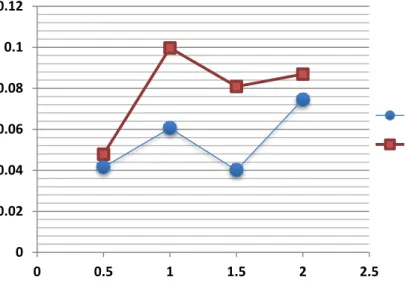
Hal ini ditandai dari perubahan tegangan yaitu setiap kenaikan tegangan dari 0 Volt mengindikasikan semakin berkurang intesitas cahaya atau semakin besar daya optik yang hilang akibat lekukan tersebut seperti yang terlihat dari hasil pengujian pada Gambar 4.3 yang juga merupakan hasil pengamatan pengaruh mikrobending serat optik akibat variasi diameter dan jarak antar kawat pada serat optik. Dari hasil percobaan perubahan diameter dan jarak antar kawat memiliki respon yang berbeda terhadap beda tegangan yang diterima oleh photodetektor.
Dari tren grafik terlihat bahwa kawat berdiameter 2.4 mm menyebabkan sensor memberikan respon yang lebih besar dibandingkan kawat berdiameter 1.6 mm. Hal ini disebabkan oleh perubahan diameter bending akibat tekanan dari kawat berdiameter 2.4 mm lebih besar dibandingkan kawat berdiameter 1.6 mm.
Dari hasil tersebut juga dapat diketahui bahwa dengan variasi kawat berdiameter 2.4 mm dan jarak 1 cm menyebabkan sensor memberikan respon yang lebih besar dibandingkan variasi lainnya dan hasil ini juga terjadi pada variasi kawat berdiameter 1.6 mm dan jarak 2 cm. Setiap variasi diameter dan jarak kawat berpengaruh terhadap tingkat respon sensor. Maka dari itu hasil penelitian ini akan dimanfaatkan untuk pengembangan desain sensor beban kendaraan yang akan dipasang dibadan jalan.
Gambar 4.3. Grafik Pengujian Mikrobending
Untuk melihat seberapa signifikan pengaruh perbedaan dari variabel diameter dan jarak antar kawat pembending, data pengamatan dianalisa dengan ANOVA (Analysis of Variance). Sebelum dilakukan uji ANOVA terlebih dahulu dilakukan uji asumsi diantaranya tes normalitas dan tes homogenitas.
Dari tabel 4.2 menunjukkan bahwa data hasil pengamatan terdistribusi normal ditandai dari hasil signifikan lebih besar dari 0.05, baik uji normalitas Kolmogorov-Smirnov maupun Shapiro-Wilk.
Tabel 4.2. Uji Normalitas Data Diameter
(mm)
Jarak (cm)
Signifikansi
Kolmogorov-Smirnof Shapiro-Wilk
1.6
0.5 0.200 0.470
1 0.200 0.660
1.5 0.200 0.840
2 0.200 0.440
2.4
0.5 0.200 0.236
1 0.200 0.475
1.5 0.200 0.765
2 0.128 0.090
0 0.02 0.04 0.06 0.08 0.1 0.12
0 0.5 1 1.5 2 2.5
Tegangan (Volt)
Jarak (cm)
1.6 mm 2.4 mm
Adapun tabel 4.3 merupakan hasil tes homogenitas masing-masing pengamatan dengan menggunakan uji Levene. Berdasarkan hasil uji homogenitas tersebut maka data masing-masing pengamatan meliliki varian yang homogen karena memiliki nilai signifikansi lebih besar dari 0,05.
Tabel 4.3. Uji Homogenitas Varians
Tegangan Levene Statistic df1 df2 Sig.
Based on Mean 1.840 1 78 0.179
Based on Median 0.714 1 78 0.401
Based on Median and with adjusted df
0.714 1 55.154 0.402
Based on trimmed mean
1.698 1 78 0.196
Dari hasil uji normalitas dan homogenitas pada masing-masing pengamatan menunjukkan bahwa data-data yang akan memenuhi asumsi-asumsi maka data- data tersebut valid untuk analisa ANOVA. Keperluan uji ANOVA ini adalah untuk mengetahui apakah perbedaan diameter kawat, perbedaan jarak antar kawat, serta interaksi diameter dan jarak antar kawat berpengaruh signifikan terhadap daya optik.
Dari Tabel 4.4 terlihat bahwa signifikansi pada kolom diameter, jarak, dan Diameter*Jarak yaitu lebih kecil dari 0.05, artinnya terdapat pengaruh perubahan daya optik ketika variabel diameter, jarak, dan juga interaksi antara diameter-jarak pada tingkat signifikansi 0,05.
Tabel 4.4. Uji ANOVA
Source Type III Sum of
Square df Mean
Square F Sig
Corrected model 0.035 7 0.05 295.701 0.000
Intercept 0.354 1 0.354 2.095E4 0.000
Diameter 0.012 1 0.012 720.686 0.000
Jarak 0.018 3 0.006 355.246 0.000
Diameter*Jarak 0.005 3 0.002 94.495 0.000
Error 0.001 72 1.688E-5
Total 0.390 80
Corrected total 0.036 79
Dari uji ANOVA ini memberikan informasi yang sangat menarik terhadap bagaimana rancangan sensor beban dengan menggunakan serat optik terutama dengan menggunakan prinsip mikrobending. Pada penelitian ini mikrobending diwakili dengan variabel diameter kawat dan jarak antar kawat yang difungsikan sebagai penyebab mikrobending pada serat optik yang akan dijadikan sebagai sensor.
Diameter kawat 1,6 mm memiliki respon yang berbeda dengan kawat yang berdiameter 2,4 mm. Apabila jarak antar kawat divariasikan dari 0,5 ; 1,0 ; 1,5 dan 2 cm untuk masing-masing jenis diameter kawat juga memberikan respon daya optik yang berbeda demikian juga ketika merubah dimeter dan jarak kawat juga memberikan respon yang berbeda. Dengan demikian terdapat 8 kombinasi rancangan sensor menurut percobaan ini yang dapat digunakan untuk diperoleh karakteristik sensor yang berbeda.
4. 3. Pengujian Validitas dan Reliabilitas Sensor Beban
Sebelum membahas hasil validasi dan reliabilitas sensor, diperlukan pembahasan error histerisis sensor. Error histerisis digunakan untuk menyatakan selisih keluaran yang diperoleh dari nilai besaran yang sama, yang sedang diukur berkenaan dengan apakah nilainya dicapai melalui perubahan kontinu naik atau turun. Selain hal itu juga perlu diketahui stabilitas dan sensitivitas dari sensor untuk memenuhi kaidah dari pembuatan sensor.
Gambar 4.4. Kurva Histerisis Sensor
Dari hasil penelitian didapat histerisis sensor yang ditunjukkan gambar 4.4 menghasilkan perubahan kontinu naik dan turun. Dari kurva tersebut juga terlihat lengkung histerisis yang menunjukkan pengukuran dengan arah naik dan turun menandakan bahwa sensor memberikan respon pada saat beban ditambah atau dikurang. Pengukuran tersebut juga menimbulkan error histerisis yang mempengaruhi kinerja sensor, dan error histerisis ditunjukkan pada tabel 4.4.
Histerisis juga diperlukan untuk mengetahui stabilitas dari sensor beban tersebut dengan mengamati Gambar 4.4. Dapat terlihat bahwa nilai tegangan tidak tepat berhimpit antara titik satu dengan lainnya. Hal ini menandakan adanya nilai perbandingan yang tidak sesuai saat penekanan dinaikkan dan diturunkan. Namun, tren kenaikan dan penurunan tegangan sebanding dengan variasi penekanan yang diberikan, dengan demikian dapat disimpulkan bahwa sensor serat optik yang dibuat relatif memenuhi kaidah stabilitas sebuah sensor. Hal ini juga dibuktikan dari % error histerisis sensor pada Tabel 4.5.
0 0.02 0.04 0.06 0.08 0.1 0.12
0 20 40 60 80 100
Tegangan (Volt)
Beban (Kg)
Tabel 4.5. Error Histerisis Beban (Kg) % Error Histerisis
0 0.5091
20 1.6714
40 3.3609
60 3.3417
80 3.5266
Dari tabel 4.4. terlihat bahwa error histerisis yang terjadi pada sensor tidak melebihi 5 % artinya histerisis sensor masih cukup baik, yang dalam hal ini menandakan sensor dapat merespon beban pada saat beban ditambah ataupun dikurang, sehingga sensor layak untuk diuji validitasnya. Error histerisis yang masih belum dapat mencapai nilai yang lebih baik lagi disebabkan oleh mekanisme dari sensor yaitu pada sistem suspensi atau elastisitas dari lapisan karet yang masih butuh penelitian lebih lanjut agar didapat hasil yang lebih optimal.
Selanjutnya pembahasan mengenai validitas sensor. Validasi sensor adalah proses pembuktian bahwa suatu sensor layak digunakan untuk mendeteksi suatu parameter tertentu sehingga dapat diketahui berapa perubahan yang terjadi agar dapat dikonversi menjadi besaran yang diinginkan. Validasi perlu dilakukan agar dapat diketahui apakah sensor beban tersebut dapat digunakan untuk mengukur beban dengan valid atau tidak.
Gambar 4.5. Grafik Validasi Sensor
Hasil validasi sensor ditunjukkan grafik pada gambar 4.5. Hasil tersebut menunjukkan bahwa tegangan keluaran sensor berbanding lurus dengan variasi beban, artinya semakin besar beban yang diberikan, maka tegangan akan semakin besar. Persamaan yang diperoleh dari grafik tersebut adalah persamaan Polynomial orde 3 yaitu y = 23040 x3 – 11934 x2 + 2023 x – 32.49, dimana y adalah variasi beban dan x adalah tegangan yang diukur. Persamaan ini yang digunakan untuk melakukan validasi beban sehingga dapat diketahui perbandingan antara beban terukur dengan beban sebenarnya. Persamaan ini juga dapat digunakan sebagai perumusan untuk aplikasi pada alat timbang sehingga dapat mengukur beban dan selanjutnya dapat dibandingkan nilai terukur dengan nilai sebenarnya.
Sensitivitas sensor juga perlu diketahui untuk mengetahui performa dari sensor beban ini. Sensitifitas merupakan perbandingan antara masukan sensor
y = 23040x3 - 11934x2 + 2023.x - 32.49
0 10 20 30 40 50 60 70 80 90
0 0.05 0.1 0.15 0.2
Beban (Kg)
Tegangan (Volt)
dengan keluaran sensor atau juga merupakan linearitas keluaran sensor, yang secara matematis dapat dicari dari
dari data grafik pada Gambar 4.5. Telah didapatkan nilai sensitivitas sensor sebesar 1.80645 mV/Kg, artinya sensor dapat mengukur tegangan terkecil sebesar 1.80645 mV setiap penambahan beban 1 Kg.
Gambar 4.6. Grafik Validasi Beban
Hasil validasi beban yaitu beban terukur dengan beban sebenarnya ditunjukkan grafik pada gambar 4.6. Dari tren grafik terlihat linier ditandai juga dari nilai R2 = 0.997 yang hampir mendekati 1 menunjukkan bahwa data tersebut akurat maka dapat dikatakan sensor beban tersebut sensitif terhadap parameter yang diukur. Dan dari hasil tersebut juga dapat diketahui bahwa sensor beban berbasis serat optik dengan prinsip mikrobending dapat digunakan dengan baik dalam pegukuran beban.
R² = 0.997
0 10 20 30 40 50 60 70 80 90
0 20 40 60 80 100
Beban Terukur (Kg)
Beban Sebenarnya (kg)
Gambar 4.7. Grafik Reliabilitas Sensor
Reliabilitas sensor juga diperlukan untuk mengetahui performa sensor. Hasil pengujian reliabilitas sensor ditunjukkan grafik pada gambar 4.7, dari tren grafik terlihat bahwa tegangan tetap stabil sampai pengulangan 20 kali, hal ini dapat dibuktikan secara signifikan dengan uji T statistik. Dari hasil uji T seperti yang terlihat pada tabel 4.6.
Tabel 4.6. Uji T Reliabilitas Sensor
Beban (Kg) N Std. Deviation Std Error Mean
20 20 0.003418344 0.000764365
60 20 0.002009812 0.000449408
Beban (Kg) t df Sig.(2-tailed) Mean
Difference
20 57.299 19 0.000 0.043743800
60 145.529 19 0.000 0.065402000
Diketahui bahwa nilai signifikan 0.000 < α = 0.05, menunjukkan bahwa seluruh data memiliki korelasi atau hubungan yang erat sehingga mengindikasikan bahwa reliabilitas sensor terpenuhi dan besarnya standar deviasi antara 0.2 % sampai 0.35 % menandakan juga bahwa penyimpangan data tegangan sangatlah kecil maka dapat dikatakan sensor tersebut akurat dan reliabilitasnya teruji.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Tegangan (Volt)
Rata-rata data
60 kg 20 kg
BAB V
KESIMPULAN DAN SARAN
5. 1. Kesimpulan
1. Dari hasil pengujian kesetabilan laser diketahui bahwa laser yang digunakan pada saat penelitian yaitu stabil dengan uji T statistik dengan signifikansi 0.000 < α = 0.05 dan nilai fluktuasi 0.44 % dari nilai rata-rata sehingga laser dapat dikatakan stabil.
2. Dari hasil pengujian pengaruh variasi diameter, jarak, dan interaksi diameter serta jarak kawat berpengaruh signifikan terhadap keluaran daya optik serat optik pada tingkat signifikansi 0,05. Dengan demikian untuk merancang sensor beban yang disesuaikan dengan kapasitas dan tingkat resolusi dapat memilih diameter dan kawat yang sesuai karena masing- masing variabel maupun interaksi kedua variabel tersebut memiliki respon yang berbeda.
3. Dari hasil pengujian validitas diketahui bahwa sensor dapat mengukur beban sehingga serat optik valid digunakan sebagai sensor beban dengan prinsip mikrobending. Reliabilitas sensor terpenuhi dengan uji T statistik pada signifikansi 0,000 < α = 0.05.
4. Hasil penelitian ini juga dapat dimanfaatkan sebagai referensi untuk perkembangan desain sensor beban kendaraan serta aplikasi sensor beban lainnya.
5. 2. Saran
1. Diharapkan dapat memilih diameter dan jarak kawat yang tepat untuk diaplikasikan pada sensor beban berbasis serat optik
2. Diharapkan dapat mengetahui pemilihan material yang tepat untuk desain sensor beban berbasis serat optik.