RANCANG BANGUN PROTOTYPE AUTOMATIC VEHICLE
CLASSIFICATION (AVC) PADA KENDARAAN JALAN TOL
Yudo Asmoro1) Harianto2) Ira Puspasari3)
Program Studi/Jurusan Sistem Komputer STMIK STIKOM Surabaya Jl. Raya Kedung Baruk 98 Surabaya, 60298
Email: 1)[email protected], 2)[email protected], 3)[email protected]
Abstrak
:
Pertumbuhan transportasi dan kebutuhan angkutan jasa dan barang setiap tahunnya selalu bertambah, khususnya pada angkutan jalan raya. Data pada tahun 2011 dan 2012 pertumbuhan transportasi jalan raya rata-rata mengalami pertumbuhan sebesar 12 %, yang meliputi kendaraan mobil penumpang, bus, kendaraan barang, sepeda motor dan kendaraan khusus.Jalan tol yang merupakan jalan bebas hambatan banyak dipilih pengendara untuk menhindari kemacetan yang terjadi di jalan raya. Dengan jumlah transportasi yang terus bertambah tidak menutup kemungkinan akan menyebabkan kemacetan pada jalan tol terutama waktu melakukan pembayaran pada gerbang keluar jalan tol.
Automatic Vehicle Classification atau AVC adalah sistem yang digunakan untuk mendeteksi jenis suatu kendaraan yang melewati jalan tanpa adanya interaksi dengan pengemudi atau seorang pengamat manusia. Dalam hal ini AVC dapat diterapkan pada pengoperasian pada jalan tol, dimana AVC berfungsi mendeteksi jenis golongan kendaraan berdasarkan jumlah gandar (As roda) dengan memanfaatkan pijakan ban kendaraan sebagai “Sensor”. Karakteristik dari roda (double wheels) dan ketinggian kendaraan juga dapat menjadi acuan dalam pengklasifikasian.
Berdasarkan hasil penelitian yang telah dilakaukan didapatkan hasil rata-rata keberhasilan sistem Automatic Vehicle Classification dalam mengklasifikasikan berbagai kendaraan sesuai ketentuan jenis golongan kendaraan jalan tol sebesar 85 % dan error sebesar 15 %.
Keywords: Automatic Vehicle Classification, AVC, Classification, Kendaraan, Jalan Tol
Pertumbuhan transportasi dan kebutuhan angkutan jasa dan barang setiap tahunnya selalu bertambah, khususnya pada angkutan jalan raya. Data pada tahun 2011 dan 2012 pertumbuhan transportasi jalan raya rata-rata mengalami pertumbuhan sebesar 12 %, yang meliputi kendaraan mobil penumpang, bus, kendaraan barang, sepeda motor dan kendaraan khusus (sumber : Korlantas Polri). Persentase pertumbuhan yang setiap tahun meningkat didasarkan pada kebutuhan perekonomian setiap masyarakat, baik individu, organisasi, hingga perusahaan dalam bidang distribusi barang, yang tidak sebanding dengan pertumbuhan jalan membuat kapasitas jalan yang setiap harinya penuh dengan aktivitas lalu lintas yang semakin padat dan terjadi kemacetan parah hampir disetiap daerah di Indonesia khususnya daerah padat karya.
Mengatasi hal tersebut, pemerintah telah mengeluarkan berbagai kebijakan diantaranya program pembangunan jalan bebas hambatan atau disebut Jalan Tol.
Sejarah jalan tol di indonesia dimulai pada tahun 1987 dengan dioperasikannya jalan tol Jagorawi dengan panjang 59 km, yang menghubungkan Jakarta, Bogor, dan Ciawi. Keberhasilan mengatasi kemacetan yang terjadi pada waktu itu, pemerintah terus mengembangkan proyek jalan tol di berbagai daerah untuk mengatasi kemacetan. Jalan tol merupakan jalan yang dikhususkan untuk kendaraan beroda 4 atau lebih dengan sistem pengambilan tiket pada awal masuk gerbang tol dan melakukan pembayaran pada gerbang keluar tol sesuai golongan dan jarak tempuh.
JCONES Vol. 5, No. 2 (2016) 25-37
Journal of Control and Network Systems
Dengan pertumbuhan transportasi jalan raya yang setiap tahunnya meningkat dan kenyamanan yang diberikan jalan tol, membuat pengendara beralih dari jalan raya ke jalan tol yang bebas dari kemacetan dan efisien waktu. Berdasarkan hal itu volume kendaraan yang menggunakan jalan tol setiap harinya bertambah banyak. Data dari Jasamarga pada jalan tol Surabaya-Gempol tahun 2009 sebanyak 165.400 kendaraan rata-rata per hari dan pada tahun 2013 sebanyak 223.209 kendaraan rata-rata per hari (sumber: Jasamarga). Dengan jumlah yang terus bertambah tidak menutup kemungkinan akan menyebabkan kemacetan pada jalan tol terutama waktu melakukan pembayaran pada gerbang keluar jalan tol.
Sistem pembayaran pada gerbang tol yang sebagian masih menggunakan cara manual dan sebagian telah menggunakan sistem toll atau e-toll pass dirasa belum dapat mengurangi penumpukkan kendaraan ketika melakukan pembayaran dikarenakan hanya kendaraan golongan 1 (jenis mobil pribadi) yang dapat menggunkanan sistem ini (untuk e-toll) dan pada e-toll pass setiap kendaraan harus memiliki perangkat transmitter atau On Board Unit (OBU) serta menggunakan gerbang tol otomatis yang khusus untuk pengguna e-toll atau e-toll pass. Sehingga untuk kendaraan golongan lainnya tetap harus menggunakan sistem pembayaran manual dan tidak dapat menggunakan gerbang tol tersebut.
METODE
Metode yang digunakan pada penelitian ini adalah cara mengklasifikasikan jenis golongan kendaraan pada jalan tol dengan memperhatikan gandar (As roda) kendaraan, double wheels (Roda ganda) kendaraan, dan ketinggian kendaraan, serta sistem transaksi pembayaran yang lebih mudah dengan menggunakan Radio Frequency Identification sebagai alat transaksi yang dapat digunakan oleh semua pengendara jalan tol.
Untuk dapat mengklasifikasikan kendaraan secara otomatis atau Automatic Vehicle Classification maka sistem perlu mengetahui jumlah gandar (as roda) suatu kendaraan, apakah kendaraan tersebut memiliki double wheels (roda ganda) pada salah satu gandarnya dan berapa ketinggian kendaraan. Setelah data-data tersebut diperoleh maka sistem akan mengklasifikasikan kendaraan tersebut termasuk kendaraan jenis golongan keberapa pada peraturan kendaraan di jalan tol. Hasil klasifikasi akan ditampilkan di
layar LCD. Dan untuk sistem transaksi pembayaran pengendara dapat menggunakan kartu tag RFID agar pintu palang dapat terbuka. Serta penggunaan sensor posisi yang digunakan untuk mendeteksi posisi kendaraan dan sebagai inputan kapan pintu palang otomatis dapat ditutup.
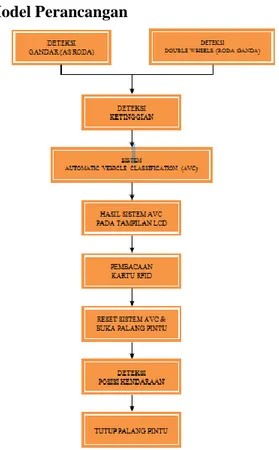
Model Perancangan
Gambar 1. Model Perancangan
Untuk dapat melakukan klasifikasi golongan kendaraan pada jalan tol harus memperhatikan beberapa hal yang berhubungan dengan kendaraan yang akan diklasifikasikan. Perhatikan pada gambar 1 , tahap pertama yang diperlukan yaitu mendeteksi jumlah gandar (As roda) dan jenis roda (double wheels) pada
kendaraan. Tahap selanjutnya
mendeteksi/mengukur ketinggian kendaraan. Setelah ketiga data parameter diperoleh sistem Automatic Vehicle Classification (AVC) akan mengklasifikasikan kendaraan tersebut. Hasil klasifikasi AVC akan ditampilkan pada layar LCD. Untuk transaksinya menggunakan RFID yang digunakan juga untuk me-reset sistem AVC dan membuka pintu palang. Agar pintu tidak tertutup secara tiba-tiba maka sensor posisi akan mendeteksi keberadaan kendaraan dan sebagai inputan untuk menutup pintu palang.
Perancangan Sistem
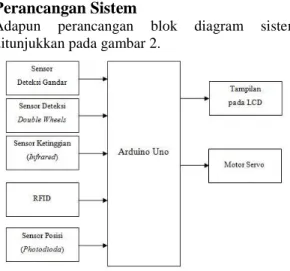
Adapun perancangan blok diagram sistem ditunjukkan pada gambar 2.
Gambar 2. Blok diagram sistem
Pada gambar 2 terdapat beberapa input dan output yang memiliki fungsi masing-masing, antara lain:
a. Sensor Deteksi Gandar (As roda)
Bagian ini digunakan sebagai counter (penghitung) jumlah gandar (As roda) yang dimiliki sebuah kendaraan ketika melewati gardu keluar jalan tol. Data diperoleh berasal dari pijakan roda kendaraan ketika melintasi sensor kemudian akan dikirimkan sebagai inputan dalam mengklasifikasikan jenis golongan kendaraan jalan tol.
b. Sensor Deteksi Double Wheels (Roda ganda) Bagian ini berfungsi sebagai detektor Double Wheels (Roda ganda) yang digunakan sebagai inputan dalam mengklasifikasikan jenis golongan kendaraan jalan tol apabila terdapat dua kendaraan misal mobil dan truk kecil yang memiliki jumlah gandar (As roda) yang sama yaitu 2 gandar (As roda). Data yang diperoleh juga berasal dari pijakan roda ganda pada kendaraan.
c. Sensor Ketinggian (Infrared)
Bagian ini berfungsi sebagai detektor ketinggian suatu kendaraan yang digunakan sebagai inputan dalam mengklasifikasikan jenis golongan kendaraan jalan tol apabila terdapat dua kendaraan misal bus sedang/besar dan truk kecil yang memiliki jumlah gandar (As roda) yang sama yaitu 2 gandar (As roda) dan terdeteksi memiliki Double Wheels (Roda ganda) yang sama juga.
d. Radio Frequency Identification (RFID) Bagian ini digunkan sebagai alat transaksi jalan tol, dimana pengendara memiliki
sebuah kartu tag Radio Frequency Identification (RFID) yang digunakan untuk transaksi dan membuka pintu palang tol dengan cara menempelkan kartu pada reader Radio Frequency Identification RFID. e. LCD
Bagian digunakan untuk menampilkan hasil klasifikasi jenis golongan kendaraan jalan tol dan hasil pembacaan sensor-sensor yang digunakan.
f. Motor Servo
Bagian ini digunakan untuk membuka tutup palang pintu gardu tol dengan inputan yang berasal dari pembacaan kartu Radio Frequency Identification RFID dan Arduino. g. Sensor Posisi (Photodioda)
Bagian ini digunakan untuk mendeteksi posisi kendaraan apakah telah meninggalkan gardu tol. Tujuannya agar kendaraan dapat menlitasi pintu palang otomatis jalan tol sebelum pintu palang otomatis tertutup kembali.
Perancangan Perangkat Keras
Perancangan perangkat keras (Hardware) yang digunakan antara lain perancangan sensor deteksi gandar (As roda), perancangan deteksi double wheels (Roda ganda), perancangan sensor ketinggian, perancangan Radio Frequency Identification (RFID), dan perancangan pintu palang otomatis. Selain itu perlu dibuat perancangan gardu Automatic Toll Road sebagai alat simulasi pengujian Automatic Vehicle Classification seperti gambar 3.
Gambar 3. Automatic Toll Road
1. Perancangan Sensor Deteksi Gandar (As roda)
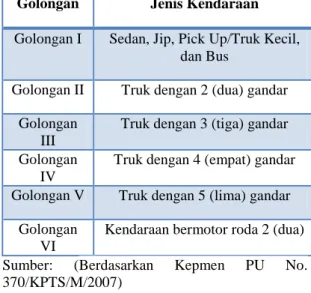
Pada perancangan sensor deteksi gandar (As roda) metode yang digunakan adalah prinsip suatu gundukan atau (pile). Dimana sesuai dengan ketentuan jalan tol bahwa penggolongan suatu jenis kendaraan yang memakai jalan tol dilihat berdasarkan jumlah gandar (As roda) (lihat tabel 1. Golongan Jenis Kendaraan).
Tabel 1. Golongan Jenis Kendaraan
Golongan Jenis Kendaraan
Golongan I Sedan, Jip, Pick Up/Truk Kecil, dan Bus
Golongan II Truk dengan 2 (dua) gandar Golongan
III
Truk dengan 3 (tiga) gandar Golongan
IV
Truk dengan 4 (empat) gandar Golongan V Truk dengan 5 (lima) gandar
Golongan VI
Kendaraan bermotor roda 2 (dua) Sumber: (Berdasarkan Kepmen PU No. 370/KPTS/M/2007)
Berdasarkan hal itu, dirancang suatu motode yang dapat mengetahui jumlah gandar (As roda) yang dimiliki suatu kendaran. Cara kerja sistem Pile ini ketika suatu kendaraan akan memasuki gardu keluar tol, maka setiap kendaraan akan melintasi Pile tersebut dan setiap pijakan roda kendaraan pada Pile akan mewakili jumlah gandar (As roda) kendaraan yang dimiliki. Sistem deteksi gandar (As roda) dengan menggunakan metode Pile dapat dilihat pada gambar 4 .
Gambar 4. Sensor Deteksi Gandar (As roda) 2. Perancangan Sensor Deteksi Double Wheels (Roda ganda)
Pada perancangan sensor deteksi double wheels (roda ganda) ini dimaksudkan untuk membedakan penggolongan kendaraan jalan tol yang secara sistem deteksi gandar (As roda) memiliki jumlah gandar yang sama. Sedangkan dalam sistem pengolongan jenis kendaraan jalan
tol berbeda (lihat tabel 1. Golongan Jenis Kendaraan). Misal suatu contoh, kendaraan mobil pribadi dan truk kecil yang sama-sama memiliki jumlah gandar (As roda) yang sama akan tetapi dalam penerapannya mobil termasuk kendaraan jalan tol golongan 1 (satu) dan truk kecil golongan 2 (dua).
Pada truk dengan kendaraan jalan tol golongan 2 (dua) memiliki double wheels (Roda ganda) pada gandar (As roda) bagian belakang. Untuk dapat mendeteksi double wheels (Roda ganda) tersebut digunakan Pile (gundukan) yang diletakkan pada sisi kanan jalan masuk gardu keluar tol (asumsi kendaraan menepi ke kanan karena mesin Automatic Toll Road berada di sebelah kanan) dengan ukuran yang disesuaikan dengan dimensi roda. Sistem deteksi double wheels dapat dilihat pada gambar 5.
Gambar 5. Sensor Deteksi Double Wheels 3. Perancangan Sensor Deteksi Ketinggian
Pada perancangan sensor deteksi ketinggian ini dimaksudkan untuk membedakan penggolongan kendaraan jalan tol yang secara sistem deteksi gandar (As roda) dan double wheels (Roda ganda) memiliki jumlah gandar dan roda ganda yang sama. Misal suatu contoh, kendaraan bus dan truk kecil yang sama-sama memiliki jumlah gandar (As roda) yang sama dan susunan roda ganda yang sama juga. Tetapi dalam penerapannya bus termasuk kendaraan jalan tol golongan 1 (satu) dan truk kecil golongan 2 (dua).
Untuk membedakan hal ini dilakukan pengukuran pada ketinggian kendaraan baik bus maupun truk. Bus memiliki bentuk yang lebih tinggi jika dibandingan dengan truk kecil. Faktor ketinggian ini dapat dijadikan acuan untuk menentukan jenis golongan kendaraan pada bus atau truk kecil. Perancangan sensor deteksi ketinggian dapat dilihat pada gambar 6
.
Gambar 6. Sensor Deteksi Ketinggian 4. Perancangan Radio Frequency Identification (RFID)
Pada perancangan Radio Frequency Identification (RFID) yaitu reader RFID diletakkan di luar pada kotak panel Automatic Toll Road yang berada di posisi kanan gardu keluar jalan tol. Setelah kendaraan berhasil diklasifikasikan menurut jumlah gandar (As roda), double wheels (Roda Ganda), dan ketinggian kendaraan, hasil pengklasifikasian jenis golongan kendaraan akan di tampilkan pada Liquid Crystal Display (LCD). Penggendara jalan tol cukup menempelkan kartu tag RFID untuk melakukan transaksi dan kartu tag RFID dapat digunakan pada seluruh jenis golongan kendaraan. Perancangan RFID dan LCD dapat dilihat pada gambar 7.
Gambar 7. Radio Frequency Identification
(RFID)
5. Perancangan Liquid Crystal Display (LCD)
Perancangan Liquid Crystal Display (LCD) yang digunakan dalam penelitian ini menggunakan LCD dengan ukuran 16 X 2 atau 16 baris dan 2 kolom. LCD digunakan untuk menampilkan hasil pengolahan data untuk memberikan informasi kepada user berhubungan dengan sistem Automatic Vehicle Classification pada kendaraan jalan tol. Perancangan Liquid Crystal Display (LCD) dapat dilihat pada gambar 8.
Gambar 8. Liquid Crystal Display (LCD) 6. Perancangan Motor Servo
Perancangan motor servo pada penelitian ini digunakan sebagai pintu palang, dengan tujaan pintu palang dapat terbuka otomatis ketika kartu tag RFID ditempelkan pada reader RFID. Perancangan motor servo dan pintu palang otomatis dapat dilihat pada gambar 9.
Gambar 9. Motor Servo dan Pintu Palang
Perancangan Perangkat Lunak
Dari perancangan sistem diatas, selain perancangan hardware, juga dibutuhkan perancangan perangkat lunak (Software) untuk menjalankan perancangan hardware yang telah dibuat.
Beberapa algoritma yang digunkan untuk dapat mengklasifikasikan jenis golongan kendaraan pada jalan tol, antara lain algoritma penghitungan jumlah gandar (As roda), algoritma pendeteksian double wheels, algoritma pengukuran ketinggian, algoritma sistem Automatic Vehicle Classification, algoritma pembacaan RFID, dan algoritma buka/tutup pintu palang otomatis.
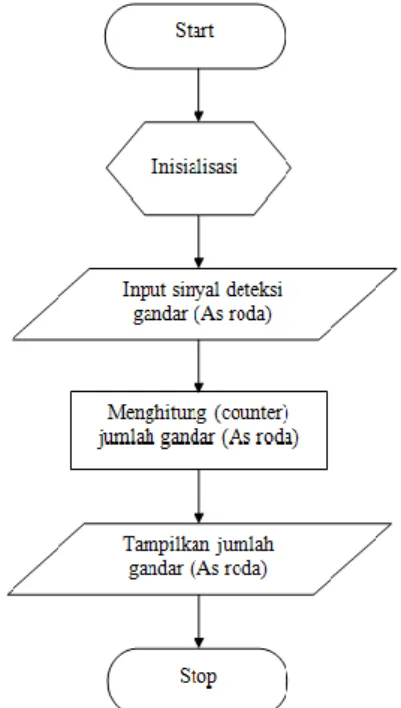
1. Algoritma Penghitungan Jumlah Gandar (As roda)
Gambar 10. Flowchart pembacaan sensor dan
penghitungan jumlah gandar (As roda) Seperti flowchart pada gambar 10 diatas, untuk dapat mengetahui jumlah gandar (As roda) perlu suatu inputan data yang diperoleh dari pendeteksian sinyal sensor yang berupa gundukan yang akan bernilai HIGH ketika gundukan tersebut mendapat pijakan roda yang mewakili sebuah gandar (As roda) suatu kendaraan. Banyaknya pijakan roda/inputan akan dihitung (counter) pada Arduino dan hasilnya akan disimpan sebagai acuan dalam pengklasifikasian jenis golongan kendaraan jalan tol.
2. Algoritma Pendeteksian Double Wheels
Gambar 11. Flowchart pembacaan sensor
pendeteksi double wheels
Untuk mengetahui suatu kendaraan memiliki double wheels (roda ganda) atau tidak, perlu pendeteksian oleh sensor yang prinsip kerjanya sama dengan pendeteksian gandar (As roda). Seperti alur flowchart pada gambar 11 , sistem akan melakukan pembacaan data pada sensor, apabila sensor mendeteksi double wheels minimal 1 (satu) kali maka sensor akan memberikan inputan berupa sinyal HIGH dan sistem akan menyimpan data “Y” yang berarti double wheels terdekesi dan akan menyimpan data “N” jika double wheels tidak terdeteksi. Data ini sebagai acuan dalam pengklasifikasian jenis golongan kendaraan jalan tol.
3. Algoritma Pengukuran Ketinggian
Gambar 12. Flowchart pengukuran sensor
Data ketinggian suatu kendaraan dibutuhkan ketika terdapat kendaraan yang memiliki nilai yang sama baik jumlah gandar (As roda) dan status double wheels (roda ganda) tetapi tergolong dalam jenis golongan yang berbeda. Nilai ketinggian kendaraan di dapat melalui pembacaan sensor seperti flowchart pada gambar 12 , sensor akan membaca jarak saat tidak ada kendaraan dan ada kendaraan. dari pembacaan tersebut sensor akan membandingkan nilai sinyal analog untuk mengetahui berapa ketinggian suatu kendaraan. Karena sensor yang digunakan mengeluarkan data output sinyal analog, maka diperlukan konversi nilai dari sinyal analog ke dalam bentuk digital.
4. Algoritma Sistem Automatic Vehicle Classification (AVC)
Gambar 13. Flowchart Automatic Vehicle
Classification System
Pada tahap pengklasifikasian golongan kendaraan atau Automatic Vehicle Classification System akan ditentukan suatu kendaraan termasuk ke golongan berapa sesuai dengan data jumlah gandar (As roda), Double Wheels (Roda ganda), dan ketinggian. Seperti flowchart pada gambar 13, setelah diperoleh data jumlah gandar (As roda), Double Wheels (Roda ganda), dan ketinggian,
sistem terlebih dahulu akan mengecek jumlah gandar (As roda), apabila parameter jumlah gandar (As roda) sudah dapat memenuhi faktor klasifikasi maka klasifikasi dapat ditentukan. Jika parameter jumlah gandar (As roda) belum dapat menentukan klasifikasi maka parameter double wheels (Roda ganda) dan ketinggian juga digunakan untuk menentukan hasil klasifikasi.
5. Algoritma Pembacaan RFID
Gambar 14. Flowchart Pembacaan RFID
Untuk alur pembacaan kartu RFID dapat dilihat pada flowchart pada gambar 14 , dimana agar kartu RFID dikenali oleh sistem maka perlu mengetahui Master ID (nomor ID) kartu tersebut. Master ID tersebut selanjutnya di tanamkan pada sistem agar kartu RFID dapat terdeteksi. Hal pertama yang dilakukan sistem yaitu mendeteksi adanya pembacaan frekuensi kartu yang dilakukan oleh reader RFID yang fungsinya mengetahui ada atau tidaknya kartu yang ditempelkan pada reader RFID. Tahap selanjutnya ketika kartu RFID ditempelkan mengecek apakah nomor ID pada kartu sesuai dengan Master ID yang telah disimpan oleh sistem. Jika sesuai maka akan tampil tulisan “Transaksi Sukses SELAMAT JALAN” , dan jika tidak sesuai maka akan tampil tulisan “Maaf, Kartu Tol anda salah” dan sistem akan kembali pada tahap pendeteksian kartu RFID pada reader RFID.
6. Algoritma Pintu Palang
Gambar 15. Flowchart Pintu Palang
Agar pintu palang dapat beroperasi secara otomatis dan terintegrasi dengan sistem yang sudah ada maka seperti pada flowchart pada gambar 3.21pintu palang akan terbuka ketika pengendara tol telah melakukan transaksi dengan kartu RFID dan palangpintu akan tertutup apabila kondisi parameter dari sensor posisi terpenuhi. Banyaknya sensor posisi yang digunakan disesuaikan dengan kebutuhan, berikut penjelasannya. Ketika kartu RFID telah berhasil melakukan transaksi selanjutnya sensor posisi S1 akan mulai mengecek apakah kondisi sensor S1 bernilai “LOW” (posisi kendaraan terdeteksi sensor posisi S1), jika tidak maka sensor posisi S1 akan kembali mengecek kondisi sampai bernilai “LOW”, jika ya maka sensor posisi S2 akan mulai mengecek apakah kondisi sensor S2 bernilai “LOW” (posisi kendaraan terdeteksi sensor posisi S2), jika tidak maka sensor posisi S2 akan kembali mengecek kondisi sampai bernilai “LOW”, jika ya maka sensor posisi S3 akan mulai mengecek apakah kondisi sensor S3 bernilai “LOW” (posisi kendaraan terdeteksi sensor posisi S3), jika tidak maka sensor posisi S3 akan kembali mengecek kondisi sampai bernilai “LOW”, jika ya maka sensor posisi S4 akan mulai mengecek apakah kondisi sensor S4 bernilai “HIGH” jika tidak maka sensor posisi S4 akan kembali mengecek kondisi sampai bernilai “HIGH”, jika ya maka palang pintu dapat ditutup yang berarti kendaraan telah melewati palang pintu.
PENGUJIAN DAN EVALUASI SISTEM
Pengujian yang dilakukan meliputi beberapa pengujian diantaranya deteksi jumlah gandar, deteksi double wheels, deteksi ketinggian,
keseluruhan sistem dan analisa hasil klasifikasi sistem Automatic Vehicle Classification (AVC).
Berikut merupakan kendaraan miniatur yang akan digunakan dalam tahap pengujian sesuai dengan jenis kendaraan yang beroperasi di jalan tol dengan perbandingan skala 1 : 30. a. Kendaraan Mobil
Tabel 2. Spesifikasi Miniatur Mobil Spesifikasi Keterangan
Jumlah gandar (as roda) 2 double wheels (roda ganda) Tidak
Ketinggian 8 cm
Gambar 16. Miniatur Mobil
b. Kendaraan Bus Sedang
Tabel 3. Spesifikasi Miniatur Bus Sedang Spesifikasi Keterangan
Jumlah gandar (as roda) 2 double wheels (roda ganda) Ya
Ketinggian 12-13 cm
c. Kendaraan Truk Kecil
Tabel 4. Spesifikasi Miniatur Truk Kecil Spesifikasi Keterangan
Jumlah gandar (as roda) 2 double wheels (roda ganda) Ya
Ketinggian 8 cm
Gamabar 18. Miniatur Truk Kecil
d. Kendaraan Truk Besar
Tabel 5. Spesifikasi Miniatur Bus Sedang Spesifikasi Keterangan
Jumlah gandar (as roda) 3 double wheels (roda ganda) Ya
Ketinggian 10-11 cm
Gambar 19. Miniatur Truk Besar
e. Kendaraan Truk Trailer Sedang
Tabel 6. Spesifikasi Miniatur Bus Sedang Spesifikasi Keterangan
Jumlah gandar (as roda) 4 double wheels (roda ganda) Ya
Ketinggian 10-11 cm
Gambar 20. Miniatur Truk Trailer Sedang
f. Kendaraan Truk Trailer Panjang
Tabel 7. Spesifikasi Miniatur Bus Sedang Spesifikasi Keterangan
Jumlah gandar (as roda) 5 double wheels (roda ganda) Ya
Ketinggian 11-12 cm
Gambar 21. Miniatur Truk Trailer Panjang
Ada beberapa pengujian yang diakukan untuk sistem dapat menetukan klasifikasi kendaraan jalan tol.
Keterangan:
Uji = nomor urut pengujian
G = jumlah gandar (As roda) kendaraan DW = double wheels Y(Ya) ; N(No) T = Tinggi kendaraan
AVC = hasil klasifikasi sistem AVC RFID = Pembacaan RFID
Ket. = Status keberhasilan sistem B(Benar) ; S(Salah)
1. Kendaraan Mobil
Tabel 8. Pengujian Kendaraan Mobil Uji G DW T AVC RFID Ket.
1. 2 N 8 Gol. 1 Ok B
2. 2 N 8 Gol. 1 Ok B
4. 2 N 8 Gol. 1 Ok B 5. 2 N 8 Gol. 1 Ok B 6. 2 N 8 Gol. 1 Ok B 7. 2 N 8 Gol. 1 Ok B 8. 2 N 8 Gol. 1 Ok B 9. 2 N 9 Gol. 1 Ok B 10. 2 N 8 Gol. 1 Ok B 11. 2 N 8 Gol. 1 Ok B 12. 2 N 8 Gol. 1 Ok B 13. 2 N 9 Gol. 1 Ok B 14. 2 N 8 Gol. 1 Ok B 15. 2 N 8 Gol. 1 Ok B 16. 2 N 9 Gol. 1 Ok B 17. 2 N 8 Gol. 1 Ok B 18. 2 N 8 Gol. 1 Ok B 19. 2 N 8 Gol. 1 Ok B 20. 2 N 9 Gol. 1 Ok B 21. 2 N 8 Gol. 1 Ok B 22. 2 N 8 Gol. 1 Ok B 23. 2 N 8 Gol. 1 Ok B 24. 2 N 8 Gol. 1 Ok B 25. 2 N 8 Gol. 1 Ok B 26. 2 N 8 Gol. 1 Ok B 27. 2 N 8 Gol. 1 Ok B 28. 2 N 8 Gol. 1 Ok B 29. 2 N 8 Gol. 1 Ok B 30. 2 N 8 Gol. 1 Ok B
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 1 untuk kendaraan jalan tol berupa mobil sebesar 100 % dengan nilai error sebasar 0 %.
2. Kendaraan Bus Sedang
Tabel 9. Pengujian Kendaraan Bus Sedang Uji G DW T AVC RFID Ket.
1. 2 Y 13 Gol. 1 Ok B 2. 2 Y 13 Gol. 1 Ok B 3. 2 Y 14 Gol. 1 Ok B 4. 2 Y 13 Gol. 1 Ok B 5. 2 Y 13 Gol. 1 Ok B 6. 2 Y 13 Gol. 1 Ok B 7. 2 Y 13 Gol. 1 Ok B 8. 2 Y 13 Gol. 1 Ok B 9. 2 N 13 Gol. 1 Ok B 10. 2 Y 14 Gol. 1 Ok B 11. 2 Y 13 Gol. 1 Ok B 12. 2 Y 13 Gol. 1 Ok B 13. 2 Y 14 Gol. 1 Ok B 14. 2 N 13 Gol. 1 Ok B 15. 2 Y 13 Gol. 1 Ok B 16. 2 Y 14 Gol. 1 Ok B 17. 2 Y 13 Gol. 1 Ok B 18. 2 Y 13 Gol. 1 Ok B 19. 2 Y 13 Gol. 1 Ok B 20. 2 Y 13 Gol. 1 Ok B 21. 2 N 13 Gol. 1 Ok B 22. 2 Y 12 Gol. 1 Ok B 23. 2 Y 13 Gol. 1 Ok B 24. 2 Y 14 Gol. 1 Ok B 25. 2 Y 13 Gol. 1 Ok B 26. 2 Y 13 Gol. 1 Ok B 27. 2 N 13 Gol. 1 Ok B 28. 2 Y 13 Gol. 1 Ok B 29. 2 Y 13 Gol. 1 Ok B 30. 2 Y 13 Gol. 1 Ok B
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 1 untuk kendaraan jalan tol berupa bus sedang sebesar 100 % dengan nilai error sebasar 0 %.
3. Kendaraan Truk Kecil
Tabel 10. Pengujian Kendaraan Truk Kecil Uji G DW T AVC RFID Ket.
1. 2 N 8 Gol. 1 Ok S 2. 2 N 7 Gol. 1 Ok S 3. 2 Y 8 Gol. 2 Ok B 4. 2 N 8 Gol. 1 Ok S 5. 2 Y 8 Gol. 2 Ok B 6. 2 Y 8 Gol. 2 Ok B 7. 2 N 7 Gol. 1 Ok S 8. 2 Y 8 Gol. 2 Ok B 9. 2 Y 6 Gol. 2 Ok B 10. 2 N 7 Gol. 1 Ok S 11. 2 N 8 Gol. 1 Ok S 12. 2 N 8 Gol. 1 Ok S 13. 2 Y 8 Gol. 2 Ok B 14. 2 Y 8 Gol. 2 Ok B 15. 2 Y 8 Gol. 2 Ok B 16. 2 N 7 Gol. 1 Ok S 17. 2 Y 7 Gol. 2 Ok B 18. 2 Y 8 Gol. 2 Ok B 19. 2 Y 8 Gol. 2 Ok B 20. 2 Y 8 Gol. 2 Ok B 21. 2 N 8 Gol. 1 Ok S 22. 2 N 8 Gol. 1 Ok S 23. 2 Y 8 Gol. 2 Ok B 24. 2 N 8 Gol. 1 Ok S 25. 2 Y 8 Gol. 2 Ok B 26. 2 Y 8 Gol. 2 Ok B 27. 2 Y 9 Gol. 2 Ok B 28. 2 Y 8 Gol. 2 Ok B 29. 2 N 8 Gol. 1 Ok S 30. 2 N 7 Gol. 1 Ok S
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 2 untuk kendaraan jalan tol berupa truk kecil sebesar 56,67 % dengan nilai error sebasar 43,33 %.
4. Kendaraan Truk Besar
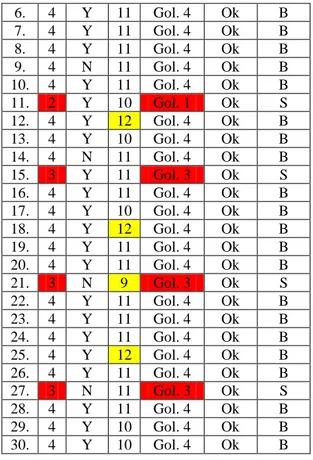
Tabel 11. Pengujian Kendaraan Truk Besar Uji G DW T AVC RFID Ket.
1. 3 Y 11 Gol. 3 Ok B 2. 3 Y 12 Gol. 3 Ok B 3. 3 Y 11 Gol. 3 Ok B 4. 3 Y 12 Gol. 3 Ok B 5. 3 Y 11 Gol. 3 Ok B 6. 2 Y 11 Gol. 1 Ok S 7. 3 Y 11 Gol. 3 Ok B 8. 3 Y 10 Gol. 3 Ok B 9. 3 N 13 Gol. 3 Ok B 10. 2 Y 10 Gol. 1 Ok S 11. 3 Y 11 Gol. 3 Ok B 12. 3 Y 10 Gol. 3 Ok B 13. 3 Y 10 Gol. 3 Ok B 14. 3 N 10 Gol. 3 Ok B 15. 3 Y 10 Gol. 3 Ok B 16. 3 Y 11 Gol. 3 Ok B 17. 3 Y 12 Gol. 3 Ok B 18. 3 Y 12 Gol. 3 Ok B 19. 3 Y 10 Gol. 3 Ok B 20. 3 Y 11 Gol. 3 Ok B 21. 3 N 11 Gol. 3 Ok B 22. 3 Y 10 Gol. 3 Ok B 23. 3 Y 11 Gol. 3 Ok B 24. 3 Y 11 Gol. 3 Ok B 25. 3 Y 11 Gol. 3 Ok B 26. 2 Y 11 Gol. 1 Ok S 27. 3 N 10 Gol. 3 Ok B 28. 3 Y 11 Gol. 3 Ok B 29. 3 Y 11 Gol. 3 Ok B 30. 3 Y 11 Gol. 3 Ok B
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 3 untuk kendaraan jalan tol berupa truk besar sebesar 90 % dengan nilai error sebasar 10 %.
5. Kendaraan Truk Trailer Sedang
Tabel 12. Pengujian Kendaraan Truk Trailr
Sedang
Uji G DW T AVC RFID Ket.
1. 4 Y 11 Gol. 4 Ok B 2. 4 Y 11 Gol. 4 Ok B 3. 4 Y 10 Gol. 4 Ok B 4. 3 Y 9 Gol. 3 Ok S 5. 4 Y 12 Gol. 4 Ok B 6. 4 Y 11 Gol. 4 Ok B 7. 4 Y 11 Gol. 4 Ok B 8. 4 Y 11 Gol. 4 Ok B 9. 4 N 11 Gol. 4 Ok B 10. 4 Y 11 Gol. 4 Ok B 11. 2 Y 10 Gol. 1 Ok S 12. 4 Y 12 Gol. 4 Ok B 13. 4 Y 10 Gol. 4 Ok B 14. 4 N 11 Gol. 4 Ok B 15. 3 Y 11 Gol. 3 Ok S 16. 4 Y 11 Gol. 4 Ok B 17. 4 Y 10 Gol. 4 Ok B 18. 4 Y 12 Gol. 4 Ok B 19. 4 Y 11 Gol. 4 Ok B 20. 4 Y 11 Gol. 4 Ok B 21. 3 N 9 Gol. 3 Ok S 22. 4 Y 11 Gol. 4 Ok B 23. 4 Y 11 Gol. 4 Ok B 24. 4 Y 11 Gol. 4 Ok B 25. 4 Y 12 Gol. 4 Ok B 26. 4 Y 11 Gol. 4 Ok B 27. 3 N 11 Gol. 3 Ok S 28. 4 Y 11 Gol. 4 Ok B 29. 4 Y 10 Gol. 4 Ok B 30. 4 Y 10 Gol. 4 Ok B
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 4 untuk kendaraan jalan tol berupa truk trailer sedang sebesar 83,33 % dengan nilai error sebasar 16,67 %.
6. Kendaraan Truk Trailer Panjang
Tabel 13. Pengujian Kendaraan Truk Trailr
Panjang
Uji G DW T AVC RFID Ket.
1. 5 Y 11 Gol. 5 Ok B 2. 5 Y 12 Gol. 5 Ok B 3. 5 Y 11 Gol. 5 Ok B 4. 4 Y 11 Gol. 4 Ok S 5. 5 Y 13 Gol. 5 Ok B 6. 5 Y 12 Gol. 5 Ok B 7. 3 Y 12 Gol. 3 Ok S 8. 5 Y 11 Gol. 5 Ok B 9. 5 N 12 Gol. 5 Ok B 10. 5 Y 12 Gol. 5 Ok B 11. 4 Y 13 Gol. 4 Ok S 12. 5 Y 13 Gol. 5 Ok B 13. 5 Y 12 Gol. 5 Ok B 14. 5 N 12 Gol. 5 Ok B 15. 5 Y 12 Gol. 5 Ok B 16. 5 Y 12 Gol. 5 Ok B 17. 4 Y 10 Gol. 4 Ok S
18. 5 Y 11 Gol. 5 Ok B 19. 5 Y 12 Gol. 5 Ok B 20. 5 Y 12 Gol. 5 Ok B 21. 5 N 12 Gol. 5 Ok B 22. 5 Y 12 Gol. 5 Ok B 23. 5 Y 12 Gol. 5 Ok B 24. 3 Y 12 Gol. 3 Ok S 25. 5 Y 12 Gol. 5 Ok B 26. 5 Y 12 Gol. 5 Ok B 27. 5 N 13 Gol. 5 Ok B 28. 4 Y 12 Gol. 4 Ok S 29. 5 Y 12 Gol. 5 Ok B 30. 5 Y 12 Gol. 5 Ok B
Tingkat keberhasilan sistem AVC dalam mengklasifikasikan jenis golongan 5 untuk kendaraan jalan tol berupa truk trailer panjang sebesar 80 % dengan nilai error sebasar 20 %.
Rata-rata keberhasilan sistem Automatic Vehicle Classification dalam mengklasifikasikan berbagai kendaraan sesuai ketentuan jenis golongan kendaraan jalan tol sebesar 85 % dan error sebesar 15 %.
KESIMPULAN
Beberapa hal yang dapat disimpulkan dari penelitian Tugas Akhir ini adalah:
1. Penentuan klasifikasi jenis golongan kendaraan pada jalan tol di dasarkan pada hasil nilai yang diperoleh dari jumlah gandar (As roda), double wheels (roda ganda), dan ketinggian kendaraan dengan rata-rata keberhasilan sistem Automatic Vehicle Classification dalam mengklasifikasikan berbagai kendaraan sesuai ketentuan jenis golongan kendaraan jalan tol sebesar 85 % dan error sebesar 15 %.
2. Sistem transaksi pembayaran menggunakan Radio Frequency Identification (RFID) yang dapat digunakan oleh semua pengguna kendaraan jalan tol dengan mengatur nomor ID kartu sama untuk semua kartu pengguna kemdaraan jalan tol.
SARAN
Untuk pengembangan lebih lanjut mengenai penelitian Tugas Akhir ini, maka penulis memberikan beberapa saran sebagai berikut:
1. Untuk memperoleh hasil nilai keberhasilan dalam pendeteksian double wheels (roda
ganda) dapat merancangkan penggunaan sensor yang lebih baik agar roda ganda dapat terdeteksi sehingga hasil klasifikasi dapat lebih akurat.
2. Sistem transaksi pembayaran dapat dikembangkan dengan menambahkan fitur penyimpanan nominal uang pada kartu RFID dan me-record data transaksi setiap kendaraan jalan tol.
DAFTAR PUSTAKA
Adam, M.Eng.Sc, Wahyu, Lamhot Sagala. . Sistem Absensi Pegawai Menggunakan Teknologi RFID. Bandung: Program Studi Teknik Informatika, STMIK LPKIA. Akbarul Huda, Arif. Mengenal Motor Servo. 2010.
https://akbarulhuda.wordpress.com/2010/0 4/01/mengenal-motor-servo/. (Diakses tanggal 15 November 2015)
Arduino.
https://www.arduino.cc/en/Main/ArduinoB oardUno/. (Diakses tanggal 9 November 2015)
Datasheet Micro Servo SG90.
http://www.micropik.com/PDF/SG90Servo .pdf/. (Diakses tanggal 5 Desember 2015) Datasheet RFID Mifare RC522.
http://www.nxp.com/documents/data_sheet /MFRC522.pdf/. (Diakses tanggal 3 November 2015)
Datasheet Sensor IR SHARP SHARP GP2Y0A21YK0F.
http://www.sharpsma.com/webfm_send/14 89/. (Diakses tanggal 3 November 2015) Golongan Jenis Kendaraan Bermotor pada Jalan
Tol yang Sudah Beroperasi http://bpjt.pu.go.id/konten/golongan-kendaraan/. (Diakses tanggal 2 November 2015)
Hermawan, Rudi. “Kaji Ulang Penentuan Tarif dan Sistem penggolongan Kendaraan Jalan Tol di Indonesia”, Jurnal Teknik Sipil. Agustus 2009, 16, hal. 1-8.
Marta Dinata, Yuwono. 2015. ARDUINO itu Mudah. Surabaya : Elex Media Komputindo.
Nurofiq. Penerapan fuzzy inference system metode mamdani untuk peningkatan akurasi klasifikasi kendaraan pada Automatic Vehicle Classification (AVC) system. Prakoso, Aji. Kunci Pintu Otomatis Berbasis
Arduino dan RFID.
Pintu_Otomatis_Berbasis_Arduino_dan_R FID/. (Diakses tanggal 6 Januari 2016) Purnama, Agus. Limit Switch dan Saklar Push On.
2012. http://elektronika-dasar.web.id/. (Diakses tanggal 11 Januari 2016)
Syahrul. 2014. Pemrograman Mikrokontroller AVR Bahasa Assembly dan C. Bandung : Informatika.
RFID Quick Start Guide: Arduino. https://www.addicore.com/v/vspfiles/downl oadables/Product%20Downloadables/RFID _RC522/RFIDQuickStartGuide.pdf/. (Diakses tanggal 20 Desember 2015) Tenoyo, Bayu. 2011. SPESIFIKASI SISTEM
AUTOMATIC VEHICLE
CLASSIFICATION MENGGUNAKAN B-METHOD. Studi Mandiri Software Engineering. Depok: Fakultas Ilmu Komputer Universitas Indonesia