Prosiding Pertemuan IImiah Perekayasaan Perangkat Nuklir PRPN- BATAN, 14November 2013
PENGUJIAN AWAL SISTEM KENDAll KONVEYOR DAN DATA AKUISISI
PAD A PORTAL MONITOR DENGAN TEKNIK SERAPAN SINAR GAMMA
Alvano Yulian, Khairul Handono, dan Dian Fitri Atmoko
PRPN - SATAN, Kawasan Puspiptek, Gedung 71, Tangerang Selatan, 15310
ABSTRAK
PENGUJIAN AWAL SISTEM KENDALl DAN AKUISISI DATA PORTAL MONITOR DENGAN TEKNIK SERAPAN SINAR GAMMA. Telah dilakukan pengujian awal sistem kendali dan data akuisisi pada portal monitor dengan teknik serapan sinar gama. Komponen sistem kendali dan data akuisisi pada sistem portal monitor ini terdiri dari sebuah konveyor yang dilengkapi dengan motor AC
3
phase, inverter, line scan camera, pengkondisi sinyal, komputer desktop sebagai remote computer, sebuah komputer desktop sebagai master com-puter, webcam dan komponen wireless LAN. Hasil pengujian menunjukkan sistem dapat bekerja dengan baik. Hasil ini terlihat pada pegujian sistem kendali jarak jauh melalui jaringan internet. Sedangkan pengujian pada data akuisisi hasil deteksi line scan dapat menangkap image obyek benda uji yang digerakkan. Kata kunci: sistem kendali, data akuisisi, line scan camera.ABSTRACT
PRELIMENARY TESTING OF CONTROL SYSTEM AND DA TA ACQUISITION ON PORTAL MONITORING WITH GAMMA RAY TECHNIQUE ABSORPTION. Prelimenary testing of control system and data acquisition system on the portal monitoring gamma ray absorption technique has been conducted. The component of control system and data acquisition systems monitor portal are a conveyor equipped with
3
phase AC motors, inverters, line scan camera, signal conditioners, computer desktop as a remote computer,a desktop computer as a master computer, webcam and wireless components LAN. The test results show that the system can work properly. These results are shown in the testing of remote control system through the Internet. While for the testing of the data acquisition scan line detection is able to capture the image of the moving object.
Keyword: control system, acquisition data, line scan camera.
1. PENDAHULUAN
Verifikasi dan validasi isi petikemas merupakan persyaratan utama ekspor maupun impor barang antar negara. Pekerjaan ini dapat dilakukan secara manual maupun otomatis. Cara manual dilakukan dengan cara membuka petikemas dan memeriksa isinya satu persatu untuk diperiksa dan disesuaikan dengan faktur. Hal ini membutuhkan waktu dan tenaga. Hal terse but jika digu-nakan di pelabuhan besar menjadi tidak efisien.
Apabila dilakukan secara otomatis yaitu dengan teknik pencitraan menjadi lebih efisien. Aplikasi sistem pencitraan ini dengan cara obyek (petikemas) dipindai menggunakan sinar tak tampak yang memiliki daya tembus besar, kemudian sinar yang menembus petikemas akan ditangkap oleh detektor untuk diolah menjadi citra. Citra ini kemudian diverifikasi sesuai dengan yang tercatat pada faktur ekspor impor.
Salah satu sistem pencitraan yang dapat digunakan untuk memindai petikemas adalah dengan teknik transmisi sinar gamma. Prototype portal monitor yang dibuat adalah dengan skala laboratorium yang tujuannya sebagai dasar perhitungan untuk merancang bentuk yang nyata atau full scale sesuai dengan kebutuhan yang akan digunakan di pelabuhan besar.
Sejalan tujuan tersebut di atas, maka dibuat sebuah prototip yang terdiri dari beberapa komponen pendukung antara lain, perangkat mekanik konveyor, sumber radiasi
gamma (y), line scan camera, frame grabber, komputer pemroses data dan komponen
yang diperlakukan sebagai dummy. Dummy merupakan suatu obyek replika atau tiruan dari peti kemas yang dibuat dari logam aluminium.
Tujuan dari penulisan makalah ini adalah untuk menguji kinerja dari sistem kendali dan data data akuisisi pad a prototipe portal monitor. Hasil yang diharapkan adalah dapat melihat isi benda apa saja yang dimasukan ke dalam dummy melalui teknik sera pan sinar gamma.
2. DESKRIPSI SISTEM
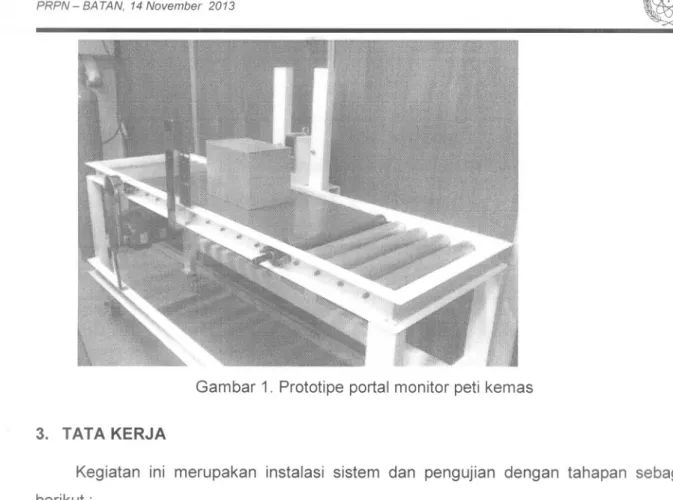
Prototip portal monitor peti kemas terdiri dari beberapa komponen utama, yaitu: sumber sinar gamma dan kolimator, detektor Nal(TI), sistem mekanik yang terdiri dari dummy, conveyor dan support, sistem data akuisisi dan sistem kendali mekanik konveyor.
Sumber sinar gamma adalah Cs137 intensitas 200 mCi yang ditempatkan pada kolimator. Sebuah sensor/detektor camera gamma diletakkan lurus sejajar dengan sumber detektor ini merupakan detektor Nal(TI). Prototip portal monitor peti kemas diperlihatkan pad a Gambar 1 berikut :
Prosiding Pertemuan IImiah Perekayasaan Perangkat Nuklir PRPN - BATAN, 14November 2013
Gambar 1. Prototipe portal monitor peti kemas 3. TAT A KERJA
Kegiatan ini merupakan instalasi sistem dan pengujian dengan tahapan sebagai berikut :
1. Sumber Cs 137 diletakkan di dalam kolimator berbentuk titik
2. Instalasi sistem konveyor, dengan menghubung-kan komponen motor AC 3 phase dan transmisinya, seperti ditampilkan pada gambar Gambar. 2 dan Gambar. 3.
Gambar 3. Motor AC 3-Phase setelah dipasang di
."'''.lllh~!!_---
:
konveyor (bagian bawah)3. Instalasi dan pengujian Inverter. Komponen system inverter ini meliputi: processor, display, interface dan catu daya. Display inverter diperlihatkan pada Gambar 4 berikut:
·,':7.
\ ,.'oJ"' "..I f"I1.DI l.r:'.-' \.;
I DisplayI
EJ~e
fTD "TIT"
I m'l IFHDI [;]I
STOP I8 0
Gambar 4. Display Inverter
Komponen sistem di kendali inverter terdiri dari prosessor kendali utama, interface sebagai penghubung dengan piranti luar yang terdiri dari RS 232 dan RS 485. Komponen lain yang tak kalah penting adalah sistem catu daya, sistem antar-muka kendali ekster-nal yang dihubungkan dengan potensiometer.
Sistem kendali yang digunakan untuk menggerakkan mekanik konveyor adalah inverter dengan varia bel frekuensi 0 sampai dengan 60 HZ pada ke-cepatan
maksimumnya. Variabel kecepatan mekanik konveyor ini disesuaikan dengan
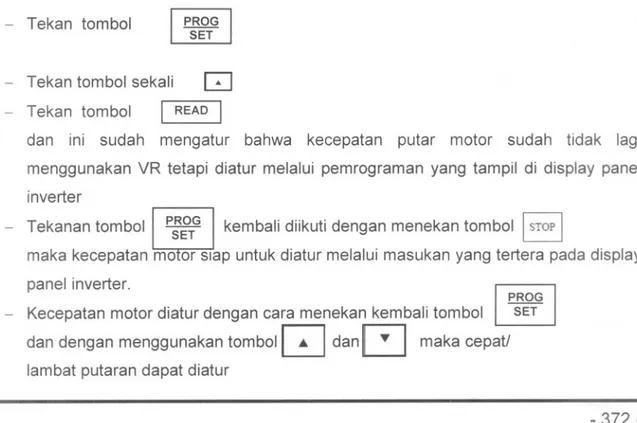
kebutuhan kecepatan pemindai citra hasH dari sera pan gamma, melalui tahapan seting program sebagai berikut :
- Tekan tombol
- Tekan tombol sekali [;]
- Tekan tombol
I
READ Idan ini sudah mengatur bahwa kecepatan putar motor sudah tidak lagi
menggunakan VR tetapi diatur melalui pemrograman yang tam piI di display panel inverter
- Tekanan tombollmaka kecepatan mo or slap untuk diatur melalui masukan yang tertera pada displayP~~TG I kembali diikuti dengan menekan tombol ISTOP I
panel inverter. [][]
PROG
- Kecepatan motor diatur dengan cara menekan kembali tombol SET
dan dengan menggunakan tombol [;] dan
c:J
maka cepat/lambat putaran dapat diatur
-Prosiding Pertemuan /Imiah Perekayasaan Perangkat Nuklir PRPN - BA TAN, 14November 2013
- Setelah nilai kece atan yang diinginkan sudah diatur maka dengan menekan kembali tombol P:~TG yang kemudian diikuti dengan menekan tombol ISTOPI
maka motor siap untuk digerakan baik maju atau mundur dengan menekan tombol
IFWD I atau IREV I
4. Pengujian sistem data akuisisi dilakukan melalui deteksi obyek di dalam kotak dummy yang digerakan di atas konveyor yang dipan-tau melalui komputer.
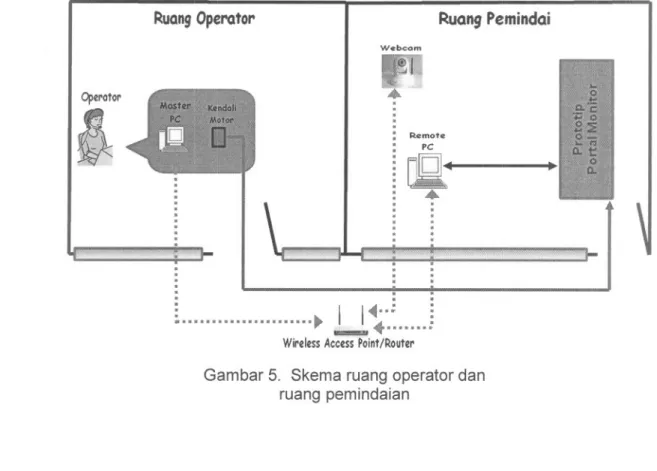
Ruang operator berfungsi sebagai pengendali operasi prototip sekali-gus penyimpanan data yang diamati. Oi dalam ruang pemindaian (deteksi) dipasang (installed) perangkat prototip berupa mekanik konveyor, sumber radiasi, line scan camera, webcam dan komputer pengendali langsung ke prototip (remotely computer). Remotely Computer ini berfungsi sebagai tempat kalibrasi line scan camera seperti terlihat pada Gambar 5 berikut ini.
Operator
~
Ruang Operator Ruang Pemindai
Wcbcom Remote PC •••
.
.
.
.
.
I I~"; :
... IIJ. ..~ ~.A..
:Wireless Access Point/Router
Gambar 5. Skema ruang operator dan ruang pemindaian
4. HASIL DAN PEMBAHASAN
A. Pengujian Sistem Kendali
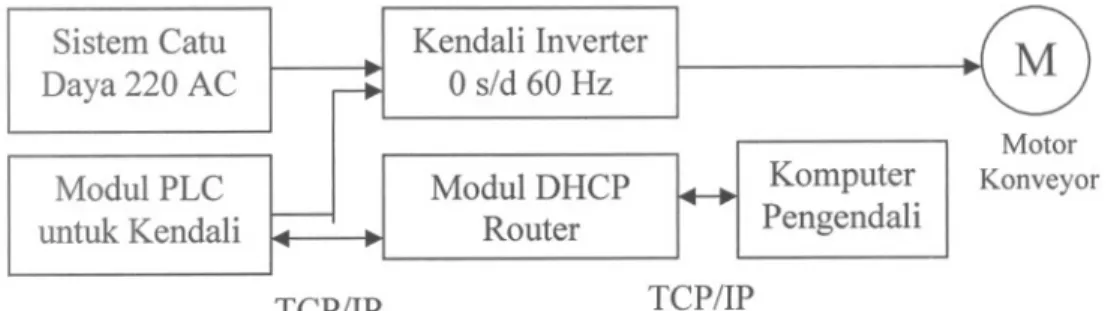
Sistem kendali pada portal monitor berfungsi untuk mengendalikan bukaltutup sumber radiasi dan kendali arah serta kecepatan konveyor. Pemba-hasan ini hanya terbatas pada kendali konveyor dengan menggunakan inverter yang divariasikan dengan variabel frekuensi sampai dengan 60 HZ pada kecepatan maksimumnya. Variabel kecepatan mekanik konveyor ini disesuai-kan dengan kebutuhan kecepatan pemindai citra hasil dari serapan gama. Beban pada konveyor berupa kotak aluminium dengan berat 20 gram. Untuk peng-aturan arah dan kecepatan konveyor, inverter akan mendapatkan data inputan dari keluaran PLC. PLC mendapatkan perintah dari komputer kendali melalui jaringan komunikasi TCP/IP, sehingga dimungkinkan pengendalian konveyor secara wireless Uarak jauh). Karena melalui jaringan TCP/IP, maka diperlukan modul DHCP router untuk membagi IP pada Modul PLC dan komputer pengendali. Pada komputer pengendali terdapat perangkat lunak untuk koumu-nikasi antara operator dan modul-modul kendali. Variasi beban dan analisis le-bih lanjut akan dilakukan pada penelitian yang akan datang. Instalasi sistem mengacu kepada diagram alir sistem kendali inverter diperlihatkan pad a Gambar 6. berikut :
Sistem Catu Daya 220 AC Modul PLC untuk Kendali TCPlIP Kendali Inverter osid 60 Hz Modul DHCP Router TCPlIP Komputer Pengendali Motor Konveyor
Prosiding Pertemuan IImiah Perekayasaan Perangkat Nuklir PRPN - BA TAN, 14November 2013
Hasil pengujian ditampilkan pada Tabel 1 berikut:
Tabel 1. Pengukuran kecepatan mekanik konveyor No JarakFrekwensiKecepatanWaktu
(Cm) (Hz)(m/dt)(dt) 1 10 6010,002 2 10 3190,005 3 10 4,36130,008 4 10 6,0690,01 5 10 780,013 6 10 870,014 7 10 9,0660,017 8 10 10,0660,017 9 20 12,0690,022 10 20 1380,025 11 20 14,0680,025 12 20 18,1260,033 13 20 2260,033 14 20 2550,04 15 40 30,068,810,045 16 40 35,128,710,046 17 40 407,560,053 18 40 45,127,150,056 19 40 50,066,930,058 20 40 606,660,06
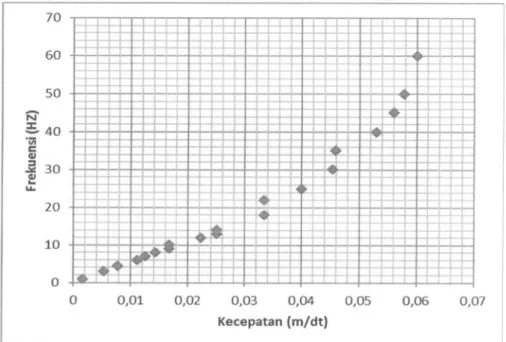
dan hubungan antara frekuensi terhadap kecepatan gerak benda uji diperlihatkan pada Gambar 7 berikut ini.
70 60 so
-
N :. 40 ';:;; C G.I j! 30 G.I..
.... 10 o o 0,01 0,02 0,03 0,04 0,05 Kecepatan (mfdt) 0,06 0,07Dari hasil tersebut terlihat pada keeepatan antara 0 sampai 0,04 m/detik terdapat hubungan daerah linier antara frekuensi dengan keeepatan, dan hubungan terse but dapat me-representasi-kan bahwa keeepatan terendah obyek bergerak adalah 10 em setiap 60 detik atau 0,1 m/menit yang di-operasi-kan pada keeepatan putar motor yang dinyatakan dalam frekwensi 1 Hz sedangkan keeepatan maksimum-nya adalah 40 em setiap 6,66 detik atau 6,06 m/detik yang di-operasi-kan pada keeepatan putar motor pada 60 Hz.
B. Pengujian Sistem Data Akuisisi
Pengujian deteksi obyek di dalam kotak dummy dilakukan dengan menggerakan kotak tersebut di atas mekanik konveyor yang ditembak sumber radiasi gamma yaitu Cs137 ber-aktivitas 200 mCi, dan untuk peneegahan operator terkena paparan radiasi maka perlu dibuat dua ruangan yaitu ruang operator dan ruang pemindaian.
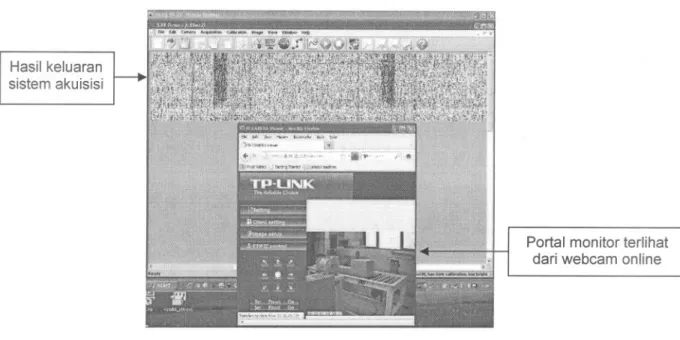
Hasil pengujian sistem data akuisisi melaui jaringan internet seperti ditampilkan pad a Gambar 8 berikut ini :
Hasil keluaran sistem akuisisi
Portal monitor terlihat dari webcam online
Gambar 8. Hasil pengujian sistem data akusisi melalui jaringan lokal (LAN)
Pada Gambar 8 merupakan salah satu frame video yang menunjukkan bahwa line
scan camera dapat menangkap citra benda uji berupa lempengan timbal (Pb) di dalam
kotak dummy aluminium yaitu berupa garis hitam pada sisi atas. Pada kegiatan pengujian
-Prosiding Pertemuan IImiah Perekayasaan Perangkat Nuklir PRPN- BATAN, 14November 2013
saat ini masih belum memuaskan akan tetapi secara umum sistem data akuisisi ini dapat berfungsi dengan baik.
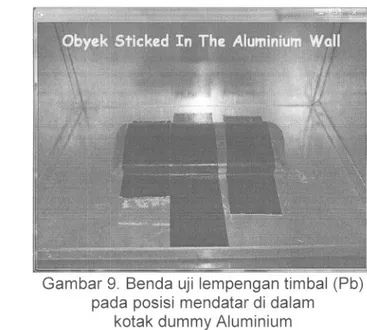
Pengujian dilanjutkan dengan benda uji lempengan timbal (Pb) datar yang diletakkan di dalam katak dummy seperti yang terlihat pada Gambar 9 berikut ini,
Gambar 9. Benda uji lempengan timbal (Pb) pada pasisi mendatar di dalam
katak dummy Aluminium
dan hasil pengujian deteksi image akuisisi data benda uji pada Gambar 9 ditam-pilkan pad a Gambar 10 berikut ini,
Gambar 10. Image hasil deteksi pada pengujian dengan lempengan timbal (Pb) yang diletakkan mendatar di
dalam katak dummy Aluminium (AI)
Pad a pengujian berikutnya untuk mendapatkan hasil (image) deteksi yang lebih baik/jelas menggunakan sumber radiasi gamma yang lebih besar sesuai dengan yang di-rekamendasi-kan aleh pemasak detektar (line scan camera) yaitu minimal 1 Curie dari
5. KESIMPULAN
Pengujian sistem kendali melalui jaringan internet menunjukkan sistem mampu
mengendalikan dummy dengan kecepatan terendah sampai kecepatan maksimum
berturut-turut sebesar 0,002 m/detik sampai dengan 0,06 m/detik pada pengoperasian 1Hz sampai dengan 60 Hz, sesuai dengan kebutuhan kece-patan pengambilan frame data dari detektor kamera gama.
Pengujian sistem data akuisisi telah dilakukan dan
menunjukkan bahawa sistem data akuisisi bekerja dengan baik. Hasil ini terlihat dari sistem monitor dapat mendeteksi obyek benda uji metal dalam kotak dummy Aluminium meskipun hasil image yang diperoleh belum memuaskan, hal ini dikarenakan sumber yang digunakan masih kecil yaitu 200 miliCurie. Pengujian selanjutnya akan diusahakan sumber dengan kapasitas yang lebih besar dengan obyek benda uji yang bervariasi.
6. DAFT AR PUST AKA
1. Alvano Yulian dkk., Perekayasaan Sistem Pencitraan Petikemas dengan teknik serapan sinar Gamma (SM10.1) 2010, PRPN-BATAN, Serpong.
2. Douglas R. Brown, Advanced technology for Cargo Security, The third meeting of the inter-american committee on Ports, Mexico, 2003 (termasuk referensi didalamnya). 3. XH8800 Series Line-scan High-energy X-ray Detector Hardware User Manual, X-Scan
Imaging Corp., USA, 2009.
4. X88 Software Development Kit Manual, X-Scan Imaging Corp., USA, 2009. 5. X88 Calibration Guide Manual, X-Scan Imaging Corp., USA, 2009.
6. Radiography of Welds Using Selenium-75, Ir-192 and X-Rays, Peter Hayward, HERA New Zealand and Dean Currie SGS, New Zealand, 2006.
7. Radioactive Material Safety Data Sheet, Stuart Hunt & Associates Ltd, St. Alberta, Alberta, 2001.
8. CT-2000ES AC Servo Motor Manual, CUTES Corporation, Taiwan, 2008. 9. TL-SC4171 G Webcam Datasheet, TP-LiNK Technologies Co. LTO, USA, 2011.
10. TL-WN422G High-Gain Wireless USB Adaptor, TP-LiNK Technologies Co. LTO, USA, 2010.
Prosiding Pertemuan IImiah Perekayasaan Perangkat Nuklir PRPN - BATAN, 14November 2013
TANYA JAWAB
Pertanyaan:
1 . Apakah dengan jumlah yang sesuai nantinya dapat mendeteksi sampai pad a benda-benda seperti: kain, kertas, dll. (Tri Harjanto)
2. Kecepatan 17 Hz dengan 47 Hz imagenya berbeda, mengapa? (Sanda)
3. Apakah data kalibrasi antara kecepatan konveyor terhadap ukuran terbaca dari benda uji? (Atang Susila)
4. Apa tujuan yang diharapkan (seperti apa)? (Joko S.)
5. Bagaimana hasil pengujian? Apakah sudah sesuai dengan yang diharapkan? Jika belum apa kendalanya? (Joko S.)
Jawaban:
1. Bila sumber yang digunakan semakin tinggi aktifitasnya maka diharapkan image akan semakin jelas, tetapi hanya efektif untuk benda-benda padat.
2. Image yang diperoleh dengan kecepatan 17 Hz lebih lebar dari yang 47 Hz karena
kecepatan scanning kamera tetap sehingga semakin cepat gerakan bvenda maka
image akan semaikn tipis.
3. Data kalibrasi belum diperoleh karena tujuan kita disini adalah gambar (image) yang paling jelas. Bila gambar sudah jelas terlihat maka akan diadakan kalibrasi
bentuk/ukuran image dengan kecepatan gerak mekanik.
4. Ingin memperoleh image yang sama dengan sinar-X hanya saja sumber radiasi tidak perlu daya listrik yang besar seperti sinar-X.