DETEKSI MARKA JALAN DAN ESTIMASI POSISI
MENGGUNAKAN MULTIRESOLUTION HOUGH TRANSFORM
Charles Edison Chandra; Herland Jufry; Sofyan Tan
Computer Engineering Department, Faculty of Engineering, Binus University Jl. K.H. Syahdan No. 9, Palmerah, Jakarta Barat 11480
ABSTRACT
This research creates algorithms to detect road lane markings and estimate the position and angle of the camera to the road markings captured. The implementation uses a camera to take a sample image and then will be processed using the Multiresolution Hough Transform as one of the main methods in road lane marking detection. Computional Cost results obtained in algorithms are slow which takes an average of 4.329301 seconds, however, the algorithm has its own advantages which are able to detect road lane marking as well as estimate the position and angle of the camera towards the road markings with an average positional error of 2.0520 cm and the average angular error of 1.355500.
Keywords: algorithm, road lane detection, multiresolution hough transform
ABSTRAK
Penelitian ini membuat suatu algoritma untuk mendeteksi marka jalan serta mengestimasi posisi dan sudut dari kamera terhadap marka jalan yang ditemukan. Implementasinya menggunakan sebuah kamera untuk mengambil sample citra yang kemudian diproses menggunakan Multiresolution Hough Transform sebagai salah satu metode utama dalam pendeteksian marka jalan. Hasil Computional Cost yang didapatkan pada algoritma ini cukup lambat yaitu dengan waktu rata-rata yang dibutuhkan sebesar 4.329301 detik. Namun, algoritma ini memiliki kelebihan tersendiri yaitu tidak hanya bisa mendeteksi marka jalan tapi juga dapat mengestimasi posisi dan sudut kamera terhadap marka jalan dengan baik, dengan eror posisi rata-rata sebesar 2.0520 cm dan eror sudut rata-rata sebesar 1.35550.
PENDAHULUAN
Lane detection merupakan suatu metode untuk mengetahui lokasi dari marka jalan tanpa
diketahui terlebih dahulu noise yang terdapat pada lingkungan sekitarnya. Lane detection ini telah menjadi penelitian yang sering dilakukan oleh banyak orang agar bisa menjadi salah satu pendukung driver assistant maupun untuk autonomous navigation yang termasuk bagian dari
inteligent transportation system. Namun, penelitian ini masih berlanjut sampai sekarang ini karena
masih terdapat banyak masalah-masalah yang belum bisa diselesaikan dalam lane detection ini. Contohnya adalah sulitnya menentukan marka jalannya pada berbagai kondisi, terutama terhadap
noise yang ada di lingkungan sekitarnya, seperti bayangan, garis-garis lain yang terdapat pada
jalan, dan juga marka jalan yang sudah tidak utuh lagi atau sudah terputus-putus.
Dalam lane detection ini terdapat beberapa metode yang bisa digunakan seperti yang digunakan oleh M. Caner Kurtul (2010) yaitu multiresolution hough transform. B.Yu and A.K. Jain (1996) juga mengunakan multiresolution hough transform tetapi dengan parameter tiga dimensi. Selain meteode tersebut, randomized hough transform digunakan oleh Azali Saudi (2008) dan Qing Li (2004).
Pada umumnya penelitian-penelitian lane detection sebelumnya hanya sampai tahap mendeteksi marka jalan saja. Pada penelitian tak hanya sampai pada tahap tersebut, melainkan dilanjutkan hingga mencari tahu posisi dan sudut dari kendaraan terhadap marka jalan yang ada.
METODE
Pada penelitian ini, kami melakukan simulasi road lane detection pada jalanan yang kosong. Informasi input yang diberikan berupa sample image jalan yang diambil menggunakan kamera. Metode yang digunakan yaitu multiresolution hough transform. Output yang dihasilkan berupa posisi kendaraan terhadap marka jalan, yang nantinya akan menampilkan hasil deteksi garis jalan dan juga untuk mengetahui posisi dari kamera.
Implementasi yang dilakukan ditujukan untuk menguji sistem yang telah dirancang, Sistem dikatakan stabil apabila output system dapat mendeteksi marka jalan yang ada serta dapat mengestimasikan posisi dan sudut dari kamera. Sistem ini diuji dengan membandingkan posisi dan sudut yang asli dengan estimasi posisi dan sudut yang didapatkan serta melihat hasil marka jalan yang ditemukan.
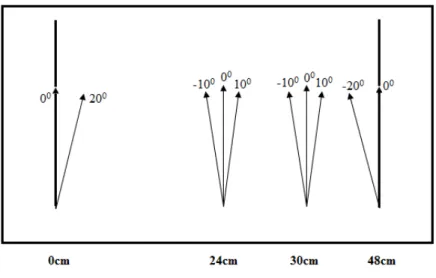
Penelitian ini melakukan percobaan sebanyak 30 kali dengan posisi dan sudut yang berbeda-beda: (1) posisi 0 cm sudut 00; (2) posisi 0 cm sudut 200; (3) posisi 24 cm sudut 00; (4) posisi 24 cm sudut 100; (5) posisi 24 cm sudut -100; (6) posisi 30 cm sudut 00; (7) posisi 30 cm sudut 100; (8) posisi 30 cm sudut -100; (9) posisi 48 cm sudut 00; (10) posisi 48 cm sudut -200. Untuk lebih jelasnya tentang posisi dan sudut dapat dilihat pada contoh Gambar 1 di bawah ini:
Gambar 1 Posisi dan sudut pengambilan data
Dengan keterangan sbb: (1) posisi kiri dari hasil yang didapatkan merupakan posisi real yang digunakan; (2) garis merah merupakan marka jalan yang ditemukan sedangkan garis hijau merupakan semua garis yang ditemukan oleh Multiresolution Hough Transform; (3) masing-masing posisi memiliki tiga sampel yang diambil rata-rata error-nya; (4) fix error posisi maksimum = 10 cm; (5) fix error sudut maksimum = 5o; (6) fix error sudut kemiringan antara dua garis = 0.02o; (7) fix jarak antara dua garis = 48 cm.
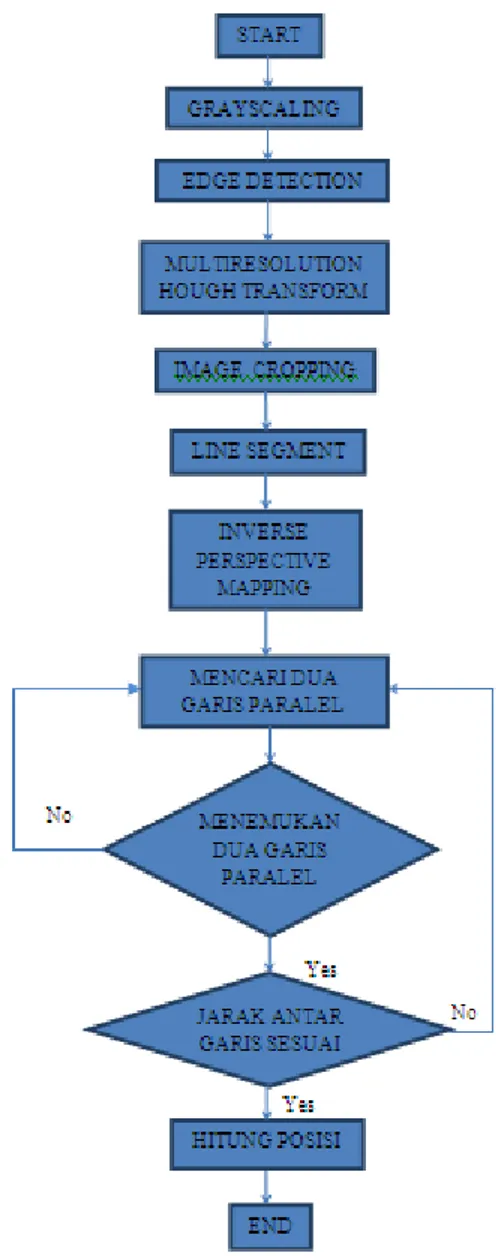
Pada penelitian road lane detection ini dibuat suatu algoritma untuk menyampaikan informasi marka jalan pada pengguna mobil. Di sini terdapat beberapa tahapan yang harus dikerjakan oleh algoritma tersebut (Gambar 2). Pertama dilakukan preproccesing pada citra yaitu
grayscale dan edge detection agar citra dapat diproses oleh multiresolution hough transform. Pada multiresolution hough transform ini akan dicari garis-garis yang terdapat pada citra yang diproses.
Selanjutnya dilakukan image cropping untuk memperkecil kemungkinan terdeteksinya garis yang bukan merupakan marka jalan. Pada garis-garis yang sudah ditemukan akan dicari line segment, yaitu titik awal dan titik akhir pada masing-masing garis serta panjang garis tersebut. Setelah itu dilakukan proses inverse perspective mapping yang bertujuan untuk memproyeksikan citra dari bidang citra ke bidang jalan. Pada citra yang sudah diproyeksikan ke bidang jalan tersebut akan dicari dua garis paralel di mana jika jarak antar garis sesuai dengan jarak yang sudah ditentukan, kedua garis yang ditemukan tersebut dianggap sebagai marka jalan. Setelah marka jalan berhasil terdeteksi, selanjutnya akan dilakukan perhitungan posisi marka jalan terhadap kamera.
Gambar 2 Diagram alir perancangan sistem secara umum
HASIL DAN PEMBAHASAN
Analisis Deteksi Marka Jalan
Tabel 1 di bawah ini menampilkan data persentase sample yang terdeteksi sebagai marka jalan berdasarkan berbagai posisi dan sudut kamera.
Tabel 1 Hasil Deteksi Marka Jalan
No Posisi dan sudut Persentase sample yang
terdeteksi sebagai marka jalan
1 Posisi 0 cm, Sudut 0O 0%
3 Posisi 24 cm, Sudut 0O 100% 4 Posisi 24 cm, Sudut 10O 100% 5 Posisi 24 cm, Sudut -10O 100% 6 Posisi 30 cm, Sudut 0O 100% 7 Posisi 30 cm, Sudut 10O 100% 8 Posisi 30 cm, Sudut -10O 100% 9 Posisi 48 cm, Sudut 0O 100% 10 Posisi 48 cm, Sudut -20O 33.33%
Pada Tabel 1 di atas terlihat rata-rata disemua posisi dapat terdeteksi marka jalan dengan 100% atau dapat dibilang semua marka jalan yang ada dapat terdeteksi dengan baik. Namun, ada satu posisi yang hanya terdeteksi 33,33% saja atau dapat dibilang hanya terdeteksi 1 dari total 3 sampel yang ada. Ada juga satu posisi yang tidak terdeteksi sama sekali karena pada kedua posisi ini kamera tidak dapat menangkap dengan jelas garis marka jalan aslinya (Gambar 3).
Gambar 3 Kedua posisi yang tidak terdeteksi marka jalannya
Analisis Estimasi Posisi dan Sudut
Tabel 2 di bawah ini menampilkan data error posisi dan sudut. Tabel 2 Hasil Estimasi Posisi dan Sudut
No Posisi dan Sudut Absolut Rata-Rata Absolut Rata-Rata
Error Posisi Error Sudut
6 Posisi 30 cm, Sudut 0O 2.3016 cm 0.2324 7 Posisi 30 cm, Sudut 10O 1.9448 cm 1.8946 8 Posisi 30 cm, Sudut -10O 1.9468 cm 2.1042 9 Posisi 48 cm, Sudut 0O 1.3749 cm 0.6869 10 Posisi 48 cm, Sudut -20O 2.2437 cm 0.5245 Rata-Rata 2.0520 cm 1.3555
Dilihat pada tabel 2 di atas posisi dan sudut yang mendapatkan error yang besar kebanyakan pada saat sudut kameranya tidak pada 00 melainkan sudah berubah dari 00 ke 200 maupun dari 00 ke ±100. Maka dari itu, perubahan sudut pada kamera dapat menyebabkan kenaikan
error posisi pada hasil yang didapatkan dan sebaliknya apabila sudut kamera pada 00 maka error posisi dan sudut yang didapatkan akan semakin kecil.
Kemudian dilihat secara keseluruhan dari rata-rata error posisi dan sudut didapatkan
error rata-rata posisi sebesar 2,0520cm dan error rata-rata sudut sebesar 1,35550. Hasil estimasi posisi dan sudut disini sudah termasuk sangat akurat karena error yang didapatkan sangat kecil sekitar 1-2cm atau derajat saja sehingga tidak berpengaruh besar pada hasilnya, dan ditambah lagi sebagian besar error yang terjadi dari pengambilan data di atas dikarenakan pada saat melakukan pengambilan data memang sulit untuk mendapatkan posisi dan sudut yang benar-benar tepat dengan hanya menggunakan pengaris dan busur. Sisanya rata-rata dapat mendeteksi marka jalan yang ada dengan baik, dan apabila dilihat dari error rata-rata yang didapatkan sebenarnya sudah sangat kecil. Sehingga tidak berpengaruh terhadap hasil yang didapatkan atau dapat dibilang sudah berhasil menemukan marka jalan dan mengestimasikan posisi dengan baik.
Analisis Waktu Proses yang Dibutuhkan
Tabel 3 di bawah ini menampilkan hasil perhitungan waktu yang dibutuhkan dalam pemrosesan.
Tabel 3 Hasil Perhitungan Waktu yang Dibutuhkan dalam Pemrosesan
Posisi dan Sudut Rata-rata Waktu Proses
Posisi 0 cm, Sudut 0O 5.773571 s Posisi 0 cm, Sudut 20O 4.34416 s Posisi 24 cm, Sudut 0O 4.365669 s Posisi 24 cm, Sudut 10O 4.958834 s Posisi 24 cm, Sudut -10O 4.666439 s Posisi 30 cm, Sudut 0O 4.193517 s Posisi 30 cm, Sudut 10O 5.277289 s Posisi 30 cm, Sudut -10O 4.102325 s Posisi 48 cm, Sudut 0O 1.974166 s Posisi 48 cm, Sudut -20O 3.63704 s Rata-Rata 4.329301 s
Dilihat pada tabel 3 di atas rata-rata waktu yang dibutuhkan sebesar 4-5 detik, kecuali pada posisi 48 cm sudut 00 karena jumlah garis yang terdeteksi pada posisi ini sangat sedikit yaitu hanya sembilan garis. Sedangkan pada posisi lain rata-rata garis yang terdeteksi di atas 20 garis sehingga waktu yang dibutuhkan untuk posisi iniuntuk menyelesaikan algoritma ini dua kali lipat lebih cepat dibandingkan dengan posisi lainnya.
Keseluruhannya waktu rata-rata pemrosesan yang dibutuhkan pada percobaan pengambilan data adalah 4.329301s. Ini dinilai cukup lambat dibandingkan dengan pemrosesan MHT yang sudah pernah ada karena di sini ditambahkan algoritma untuk mengestimasikan posisi dari kamera terhadap marka jalan sehingga tentunya computational cost jadi lebih besar.
Analisis Perbandingan HT Dengan MHT
Berikut adalah data hasil pendeteksian marka jalan dan waktu yang dibutuhkan menggunakan HT (Tabel 4).
Tabel 4 Hasil Pendeteksian Marka Jalan dan Waktu yang Dibutuhkan Menggunakan HT
Posisi & Sudut Threshold waktu
375 150 75
0cm & 0° Tidak terdeteksi Tidak terdeteksi Tidak terdeteksi - 0cm & 20° Tidak terdeteksi Tidak terdeteksi Tidak terdeteksi - 24cm & 0° Tidak terdeteksi Terdeteksi Tidak terdeteksi 1.7s 24cm & 10° Tidak terdeteksi Tidak terdeteksi Tidak terdeteksi - 24cm & -10° Tidak terdeteksi Terdeteksi Tidak terdeteksi 1.8s 30cm & 0° Tidak terdeteksi Terdeteksi Tidak terdeteksi 1.6s 30cm & 10° Tidak terdeteksi Terdeteksi Tidak terdeteksi 2s 30cm & -10° Tidak terdeteksi Terdeteksi Tidak terdeteksi 1.8s 48cm & 0° Tidak terdeteksi Tidak terdeteksi Tidak terdeteksi - 48cm & -20° Tidak terdeteksi Tidak terdeteksi Tidak terdeteksi -
Dilihat pada Tabel 4 di atas dapat disimpulkan MHT tidak hanya lebih cepat computional
cost nya melainkan juga ketelitian pendeteksiannya. HT hanya dapat mendeteksi saat threshold
sebesar 150 di mana lebih cepat dalam waktu tapi hanya mampu mendeteksi setengah dari seluruh sample. Selain itu, ketika diturunkan threshold-nya untuk menambah ketelitian, waktunya yang dibutuhkan sudah terlalu lama sampai matlab saja tidak sanggup untuk memprosesnya lagi.
SIMPULAN
Diharapkan kedepannya dapat ditambahkan algoritma lagi untuk menambah ketelitian pendeteksiannya. Tentunya dengan ditambahkan algoritma lagi, waktu yang dibutuhkan akan semakin lama sehingga diharapkan juga bisa dioptimasikan lagi algoritma untuk mempersingkat waktu perhitungan dengan cara mengimplementasikan secara real-time, karena apabila secara real-time thresholdnya bisa dinaikkan lagi agar garis yang terdeteksi semakin sedikit dan waktu prosesnya juga akan semakin cepat.
DAFTAR PUSTAKA
Jain, B. Y. (1996). A robust and fast skew detection algorithm. Pattern Recognition, 1599-1629. Kurtul, M. C. (2000). Road Lane and Traffic Sign Detection and Tracking. Istanbul: Bogazici
University.
Qing Li, N. Z. (2004). Lane boundary detection using an adaptive. Intelligent Control and
Automation, 2004. WCICA 2004. Fifth World Congress, Shanghai, 4084 – 4088.
Saudi, J. T Azali. (2008). Fast lane detection with randomized hough transform. ITSim 2008:
International Symposium, Kinabalu, 1 – 5.
Yu, B., & Jain, A. K. (1997). Lane boundary detection using a multiresolution hough transform.