BAB IV
PENGUJIAN ALAT DAN PROGRAM
Tujuan dari adanya pengujian alat dan program ini yaitu untuk menghasilkan sebuah alat mobil kontrol berbasis android dengan monitor camera WIFI sebagai cctv sebagai bahan yang akan diangkat. Pengujian dilakukan agar mekanik, program dan software dapat berjalan dengan baik, untuk itu diperlukanya pengujian. Pengujian dilakukan pada setiap bagian – bagian alat dan program beserta softwareya secara detail yang akan dijelaskan pada bab ini.
4.1 Pengujian Rangka Mobil
Hasil pembuatan rangka Mobil yang sudah di letakan perangkat – perangkat pembantu dalam menjalankan Mobil kontrol.
Gambar 4.1 Rangka Mobil Tampak atas 4.1.1 Pengujian Body Depan Mobil
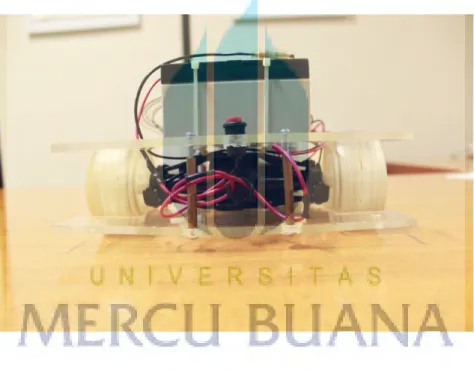
Tujuan dari pengujian body depan mobil adalah untuk mengetahui apakah rangka depan mobil ini layak dipakai sebagai alat mobil kontrol berbasis android dengan monitoring camera Wifi sebagai CCTV.
Gambar 4.2 Body depan tampak atas
Terlihat mobil dari tampak atas bahwa tidak ada kemiringan pada sisi kanan dan sisi kiri body mobil dan juga tidak ada kemiringan pada kedua sisi roda. Untuk switch tidak ada masalah pada penempatanya besi, pada limit switch kanan dan limit switch kiri besi sejajar tidak ada kemiringan.
Gambar 4.3 Body depan tampak samping
Dari hasil pembuatan dan pengujian body depan terlihat bahwa tidak ada masalah dalam penempatan switch, ban serta motor depan sehingga mobil kontrol dapat berjalan dengan sempurna.
4.1.2 Pengujian Body Tengah Mobil
Tujuan dari pengujian body tengah mobil adalah untuk mengetahui apakah rangka tengah mobil ini layak dipakai sebagai alat mobil kontrol berbasis android dengan monitoring camera Wifi sebagai CCTV.
Gambar 4.4 Body Tengah tampak atas
Terlihat mobil dari tampak atas bahwa untuk body tengah bagian kanan dan bagian kiri sama, tidak ada kemiringan . untuk motor depan posisi motor berada pas di tengan body sehingga tidak ada kemiringan di kedua sisinya.
Gambar 4.5 Body tengah tampak samping
Dari hasil pengujian dan pembuatan Body tengah terlihat bahwa tidak ada masalah dalam penempatan Arduino Uno, Motor Shield, serta penataan kabel sehinggan Mobil kontrol dapat berjalan dengan sempurna.
4.1.3 Pengujian Body Belakang Mobil
Tujuan dari pengujian body belakang mobil adalah untuk mengetahui apakah rangka belakang mobil ini layak dipakai sebagai alat mobil kontrol berbasis android dengan monitoring camera Wifi sebagai CCTV.
Gambar 4.6 Body belakang tampak atas
Terlihat bagian mobil belakang tampak atas bahwa tidak ada kemiringan dalam penempatan Kamera, serta tidak ada kemiringan untuk roda belakang sebelah kanan dan sebelah kiri
Gambar 4.7 Body belakang tampak samping
Dari hasil pengujian dan pembuatan Body belakang terlihat bahwa tidak ada masalah dalam penempatan Accu, Roda belakang, Motor Gear, serta WIFI camera sehingga mobil kontrol dapat berjalan dengan sempurna.
4.2 Pengujian Motor DC PWM
Mobil kontrol mempunyai dua buah Motor DC dengan fungsi yang berbeda, untuk Motor DC depan difungsikan untuk putaran ke arah kanan dan arah kiri sedangkan untuk Motor DC belakang difungsikan untuk arah putaran ke arah depan dan arah belakang. Agar mobil kontrol
berjalan dengan baik dan stabil maka Motor DC depan dan belakang akan diuji terlebih dahulu putarannya apakah dapat berputar dan bekerja dengan baik untuk menghasilkan suatu pergerakan yang stabil.
Gambar 4.8 Rangkaian Motor DC
Motor DC kanan dan kiri yang masuk ke Motor Shilde sudah terhubung ke Arduino uno yang sudah diberi catu daya dan juga sudah diberi uploadan program arduino yang dimasukan menggunakan software arduino.
Gambar 4.9 Skematika Rangkaian Motor DC
Skematika rangkaian dibuat sebagai panduan dalam pembuatan rangkaian elektronika, proses pembuatan skema rangkaian elektronika dapat dilakukan dengan cara manual dan dengan aplikasi komputer.
Gambar 4.10 merupakan motor depan yang tampak pada bagian atas, berada di posisi tengah yang dibawahnya langsung tersambung pada gear as untuk mengendalikan roda ke kanan dan ke kiri.
Gambar 4.11 Motor depan tampak samping
Pada gambar 4.11 adalah motor bagian depan yang tampak pada bagian depan, terlihat motor tegak lurus dan langsung mengarah ke gir as tampa adanya kemiringan di sisi kanan maupun kiri gir as. Ini menunjukan bahwa motor depan tidak ada masalah dan dapat berjalan dengan sempurna.
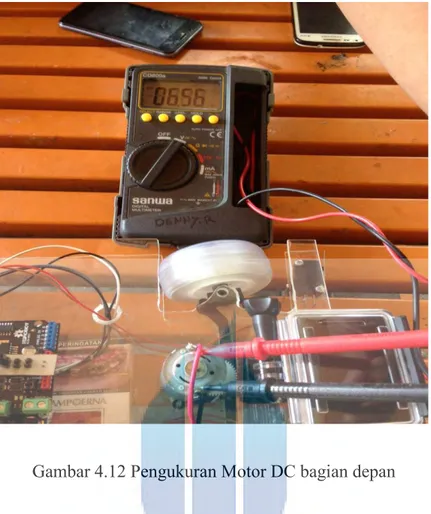
Gambar 4.12 Pengukuran Motor DC bagian depan
Pengukuran Motor DC bagian depan dilakukan pada saat kondisi HIGH ketika mobil kontrol sudah terkoneksi ke software android yang sudah dikendalikan untuk motor pada kondisi putaran kanan atau kiri, dimana Arus 12Volt mengalir pada Arduino yang sudah terhubung ke Motor Shiled dan menuju ke motor DC bagian depan, untuk nilai yang didapat 6,56V. untuk tegangan yang didapat pada motor DC bagian depan.
Tombol Android
Motor Depan Status Presentasi Keberhasilan
Kanan Kiri
Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100%
Bekerja Berhasil 100%
Bekerja Berhasil 100%
Tabel 4.13 Percobaan Motor DC Depan
Gambar 4.14 Motor Belakang tampak belakang
Gambar 4.14 Merupakan motor belakang yang tampak pada bagian belakang, motor menggunakan gearbox yang sudah ditutup rapih.
Gambar 4.15 Motor Belakang tampak samping
Gambar 4.15 Merupakan motor belakang yang tampak pada bagian samping, motor menggunakan gearbox yang sudah ditutup rapih.
Pengukuran Motor DC bagian belakang dilakukan pada saat kondisi HIGH ketika mobil kontrol sudah terkoneksi ke software android yang sudah dikendalikan untuk motor pada kondisi putaran maju atau mundur, dimana Arus 12Volt mengalir pada Arduino yang sudah terhubung ke Motor Shiled dan menuju ke motor DC bagian belakang, maka nilai yang didapat 7,57V untuk tegangan yang didapat pada motor DC bagian belakang.
Tombol Android
Motor Belakang Status Presentasi Keberhasilan Maju Mundur Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100% Bekerja Berhasil 100%
Bekerja Berhasil 100%
Bekerja Berhasil 100%
Bekerja Berhasil 100%
Tabel 4.17 Percobaan Motor DC Belakang 4.3 Pengujian Limit Switch
Limit Switch difungsikan untuk mengontrol mobil kontrol pada saat mobil kontrol tidak terkendali dan mengamankan mobil kontrol pada saat terjadinya benturan pada dinding dan sebagainya. Agar Limit Switch berjalan dengan baik akan dibuat rangkaian ketika program arduino sudah di upload ke dalam handware arduino beserta skematika rangkaiannya.
Gambar 4.18 Rangkaian Limit Switch
Pada Gambar 4.18 dibuat rangakain untuk limit switch menggunakan software aplikasi yang fungsinya agar dapat memahami masukan – masukan dari switch ke arduino uno dan sebaliknya.
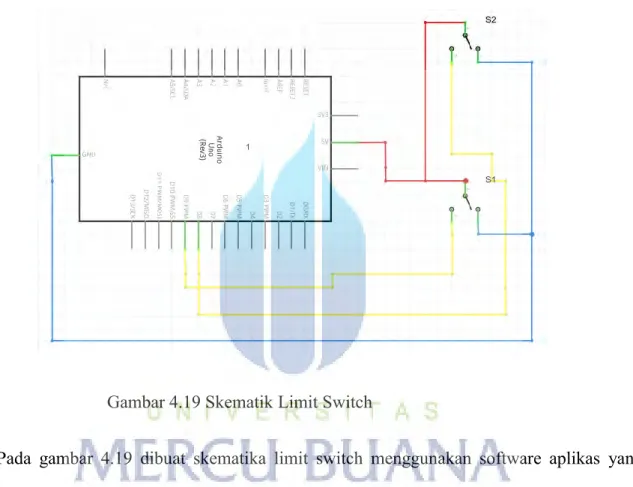
Gambar 4.19 Skematik Limit Switch
Pada gambar 4.19 dibuat skematika limit switch menggunakan software aplikas yang memang dibuat agar dapat lebih jelas lagi dipahami masukan dan keluaran output maupun input dari arduino ke switch bahkan sebaliknya.
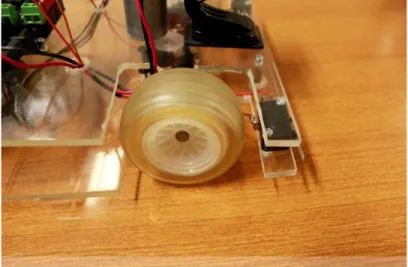
Gambar 4.20 Switch kanan tampak atas
Pada gambar 4.20 adalah hasil dari perancangan switch kanan tampak dari atas yang bisa dilihat bahwa tidak ada benturan antara roda sebelah kanan dengan switch saat lurus maupun berbelok, sehingga dapat dikatan laju mobil dapat berjalan dengan sempurna.
Gambar 4.21 Switch kiri tampak atas
Gambar 4.21 Merupakan hasil dari perancangan switch kiri tampak dari atas yang bisa dilihat bahwa tidak ada benturan antara roda sebelah kiri dengan switch saat lurus maupun berbelok, sehingga dapat dikatan laju mobil dapat berjalan dengan sempurna.
Limit Switch Kondisi Mobil Status Presentasi Keberhasilan Switch Kanan Switch Kiri Mundur Diam Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Ditekan X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100% Dilepas X Berhasil 100%
Tabel 4.22 Percobaan Limit Switch Kanan dan Kiri
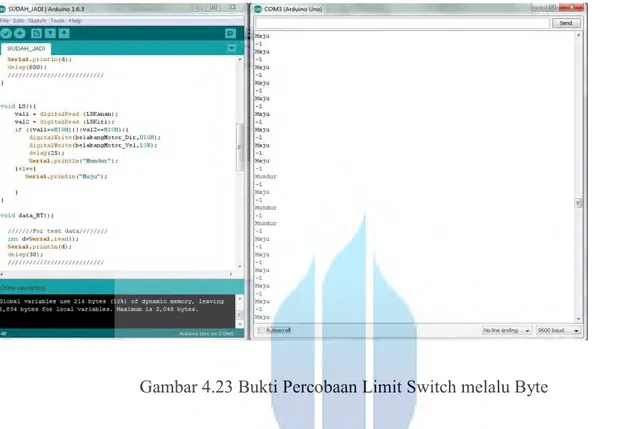
Gambar 4.23 Bukti Percobaan Limit Switch melalu Byte
Terlihat pada gambar 4.23 adalah proses pada saat mobil melaju dan limit switch tertekan sehinggan muncul nilai “ mundur “ karna kalimat telah disesuaikan terlebih dahulu di serial.println(); -nya. Ketika limit switch kembali ke awal atau tidak tertekan lagi maka nilainya kembali lagi menjadi “ maju “.
4.4 Pengujian Bluetooth HC – 05
Bluetooth HC – 05 difungsikan untuk menerima kontrol yang masuk dari smartphone yang aplikasiya sendiri sudah di buat oleh eclipse. Bluetooth di uji agar bisa connect dan berjalan dengan baik pada saat mobil di kontrol oleh smartphone. Untuk pengujianya dibuat rangkaian beserta skematikanya.
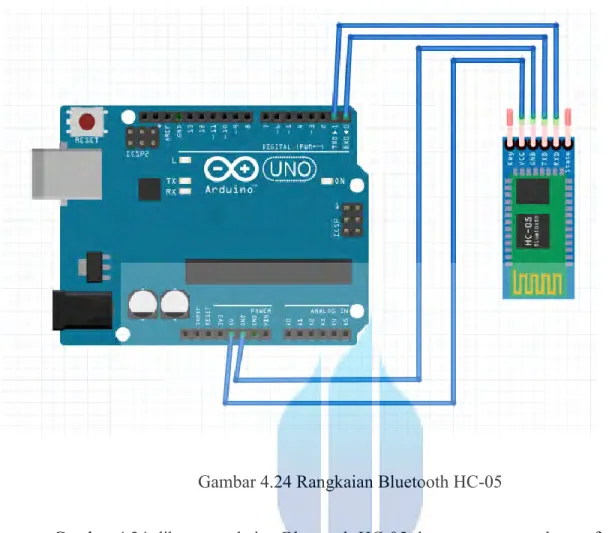
Gambar 4.24 Rangkaian Bluetooth HC-05
Gambar 4.24 dibuat rangkaian Bluetooth HC-05 dengan menggunakan software aplikasi agar mudah memahami masukan – masukan dari Bluetooh HC-05 sampai ke arduino dan sebaliknya.
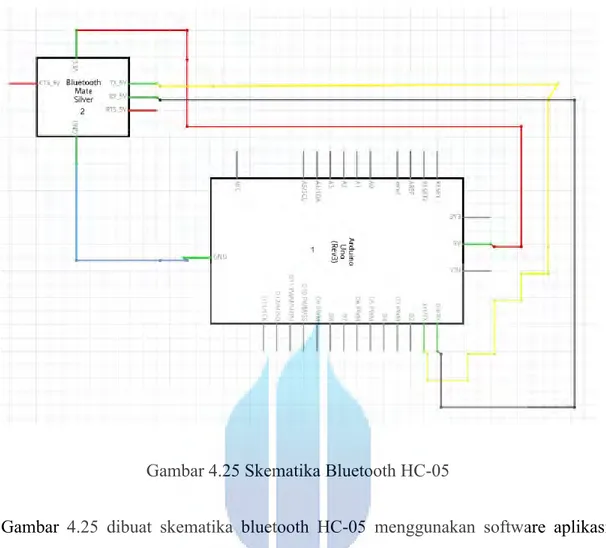
Gambar 4.25 Skematika Bluetooth HC-05
Gambar 4.25 dibuat skematika bluetooth HC-05 menggunakan software aplikasi agar dapat lebih mudah lagi memahami output proses dan inputnya bluetooth HC -05 ke arduino uno bahkan sebaliknya.
Gambar 4.26 Bluetooth HC – 05 tampak samping
Gambar 4.26 adalah Bluetooth HC-05 tampak pada atas yang sudah di upload dengan arduino uno dan telah diberi catu daya juga telah di koneksikan dari smartphone dan sudah dibaca oleh bluetooth HC-05.
Tombol Android
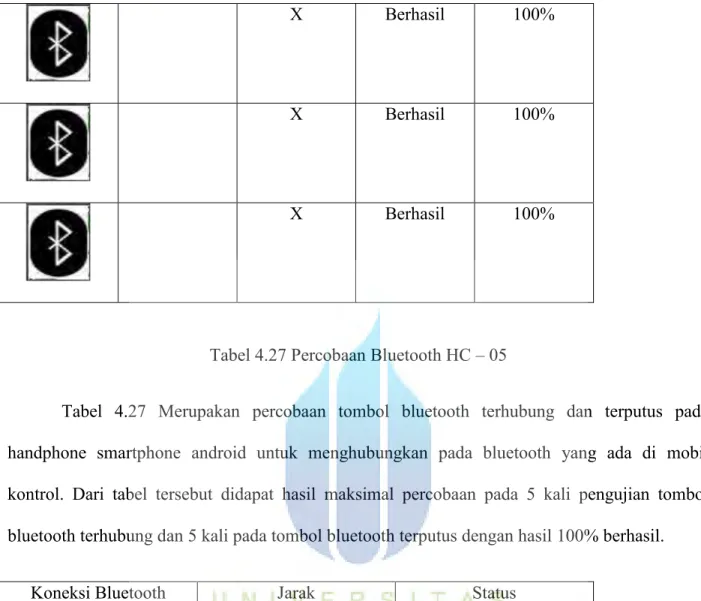
Status Koneksi Status Presentasi Keberhasilan Terhubung Terputus X Berhasil 100% X Berhasil 100% X Berhasil 100% X Berhasil 100% X Berhasil 100% X Berhasil 100% X Berhasil 100%
X Berhasil 100%
X Berhasil 100%
X Berhasil 100%
Tabel 4.27 Percobaan Bluetooth HC – 05
Tabel 4.27 Merupakan percobaan tombol bluetooth terhubung dan terputus pada handphone smartphone android untuk menghubungkan pada bluetooth yang ada di mobil kontrol. Dari tabel tersebut didapat hasil maksimal percobaan pada 5 kali pengujian tombol bluetooth terhubung dan 5 kali pada tombol bluetooth terputus dengan hasil 100% berhasil.
Koneksi Bluetooth Jarak Status
Terhubung 5 Meter Terhubung
Terhubung 10 Meter Terhubung
Terhubung 15 Meter Terhubung
Terhubung 20 Meter Terhubung
Terhubung 25 Meter Terhubung
Terhubung 30 Meter Putus - Putus
Tabel 4.28 Pengujian Jarak Maksimal Koneksi Bluetooth
Tabel 4.28 Merupakan pengujian penghitungan jarak dari bluetooth di smartphone android ke bluetooth di mobil kontrol dan begitu pun sebaliknya, dari tabel 4.28 didapan hasil jarak maksimalnya yaitu 25 M untuk dapat mengontrol mobil kontrol dengan smartphone android. Jika lebih dari 25 M koneksi bluetooth akan terputus – putus sehingga menyebabkan mobil kontrol akan sulit di remote dan jika semakin jauh koneksi bluetooth akan terputus dan tidak dapat di kontrol.
4.5 Pengujian WIFI Kamera
Wifi kamera difungsikan untuk memonitoring sekeliling lingkungan yang ada di sekitar , Wifi kamera diuji agar bisa terhubung ke seluruh gadget serta dapat memberikan gambar yang terbaik agar pengguna dapat memonitor dan mengontrol mobil secara maksimal.
Untuk menghubungkan Wifi Kamera ke Smartphone yang akan digunakan sebagai monitoring gambar, ada langkah – langkah yang dilakukan sebagai berikut :
Langkah 1 :
Dari gambar di Atas terlihat nama Wifi yang ada pada Kamera Go Pro Indriyanuzz ke Smartphone.
Gambar di atas adalah Wifi yang di kirim dari Kamera Go Pro telah terhubung ke Smartphone.
Ketika koneksi Wifi dari Kamera Go Pro ke Smartphoe telah terhubung lalu buka Aplikasi Go Pro yang sebelum nya telah di Install di App Store.
Gambar di atas adalah aplikasi Go Pro yang telah di buka, seluruh media dan hasil photo online dari seluruh pengguna aplikasi Kamera Go Pro akan terlihat. Untuk memonitor kamera pilih gambar kamera.
Ketika simbol kamera sudah di buka akan muncul pilihan control dan media yang control sendiri memiliki funsi sebagai monitor kamera dan media adalah hasil dari gambar atau monitor kamera itu sendiri.
Gambar 4.29 adalah hasil monitor di ruangan 1 pada posisi mobil kontrol yang sudah di kendalikan oleh smartphone android dengan jarak 20M.
Gambar 4.30 Hasil Monitor kamera lokasi 2
Gambar 4.30 adalah hasil monitor di ruangan 2 pada posisi mobil kontrol yang sudah di kendalikan oleh smartphone android dengan jarak 20M. Tabel 4.31 Pengujian Jarak Maksimal Koneksi Wifi Kamera
Koneksi WiFi Jarak Status
Terhubung 10 Meter Terhubung
Terhubung 20 Meter Terhubung
Terhubung 30 Meter Terhubung
Terhubung 40 Meter Terhubung
Terhubung 50 Meter Putus - Putus
Terhubung 60 Meter Putus - Putus
Tabel 4.31 Merupakan pengujian penghitungan jarak dari Monitor Kamera di smartphone ke Kamera di mobil kontrol dan begitu pun sebaliknya, dari tabel 4.31 didapan hasil jarak maksimalnya yaitu 25 M untuk dapat memonitor mobil kontrol dengan smartphone. Jika lebih dari 25 M koneksi Wifi akan terputus – putus sehingga menyebabkan gambar akan Patah – Patah di Monitor Smartphone dan jika semakin jauh koneksi Wifi akan blank dan hilang di layar Smartphone dan tidak dapat di Monitor.
4.6 Pengujian Aplikasi Android
Aplikasi Android dibuat pada sebuah Aplikasi Software Esclipe yang berfungsi untuk mengontrol laju mobil dengan bantuan bluetooth sebagai jembatanya. Aplikasi android diuji agar bisa di install pada smartphone dan di connect pada bluetooth yang terdapat pada mobil yang sudah di di program di software android.
Langkah 1 :
Simpan aplikasi Indriyanusmanalor.apk ke dalam internal smartphone
Gambar di atas adalah saat dimana project aplikasi yang dibuat sudah di export dan di pindahkan ke smartphone android.
Langkah 2 :
Biasanya Smartphone android akan mengirimkan pemberitahuan bahwa ada aplikasi yang tidak dikenal akan diinstall, jika memang dikenal laporkan bahwa aplikasi tersebut dikenal dan sumber terpercaya agar dapat diinstall.
Langkah 3 :
Smartphone akan mengirimkan pemberitahuan ulang agar aplikasi yang akan di install benar – benar dari sumber terpercaya dan diketahui jelas.
Langkah 4 :
Setelah memverfikasi bahwa aplikasinya dari sumber yang terpercaya maka smartphone akan memberikan izin untuk meninstall aplikasinya.
Smartphone android sedang menginstall aplikasi yang dibuat ke smartphone android, jika memang berhasil biasanya akan terlihat tanda centak bahwa aplikasi berhasil di install, jika tidak berhasil biasanya smartphone android akan munculkan errornya. Error yang terjadi biasanya disebabkan pada kurangya perintah – perintah yang di tanam pada saat pembuatan aplikasi android.
Langkah 6 :
Ketika smartphone android telah selesai menginstall, akan ada pemberitahuan untuk membuka aplikasi tersebut, jika memang tidak ingin membuka aplikasinya langsung bisa memilih tombol selesai.
Gambar diatas adalah saat aplikasi di buka, setiap membuka aplikasi Indriyanusmanalor.apk akan muncul pemberitahuan untuk mengaktifkan bluetooth secara otomatis, tidak jika memang aplikasi sedang tidak ingin dijalankan.
Langkah 8 :
Gambar diatas adalah aplikasi indriyanusmanalor.apk yang sudah siap untuk digunakan dan di hubungkan ke mobil kontrol.
4.7 Pengujian Keseluruhan Alat
Mobil kontrol berbasis android mengunakan Wifi kamera sebagai CCTV dibuat untuk kebutuhan manusia agar mobil dapat dipakai sebagai monitor jarak jauh, untuk dapat menghasilkan alat yang berjalan sesuai analisa yang dibuat maka mobil kontrol di uji keseluruhan rangkaiannya dengan skematik.
Gambar 4.32 Rangkaian Keseluruhan Mobil Kontrol
Pada gambar 4.32 dibuat rangkaian keseluruhan mobil menggunakan software aplikasi agar mudah untuk memahami masukan – masukan dari masing – masing alat yang disatukan ke dalam sebuah mikrokontroler arduino uno dan di program lalu diupload.
Pada gambar 4.33 dibuat skematik keseluruhan mobil menggunakan software aplikasi dengan tujuan agar dapat lebih mudah lagi membaca masing – masing alat untuk output, proses dan inputnya.
Gambar 4.34 Smartphone sudah terhubung dengan Bluetooth dari Mobil Kontrol
Pada gambar 4.34 adalah hasil pengujian Smartphone yang sudah terhubung dengan bluetooth HC-05 , status di smartphone sudah berubah menjadi “connect” yang artinya sudah bisa menjadi kontrol untuk menjalankan mobil.
Gambar 4.35 Mobil kontrol berbasis andorid menggunakan WIFI camera sebagai CCTV Gambar 4.35 merupakan hasil dari percobaan mobil kontrol yang sudah diberi catu daya dan sudah dapat berjalan dengan kontrol smartphone android, tidak ada masalah pada saat mobil berjalan dan dapat dikatakan mobil berjalan sempurna.
4.8 Percobaan Program Arduino pada Mobil kontrol
Percobaan ini dilakukan untuk mengetahui apakah program yang dibuat pada program arduino benar terupload ke perangkat arduino dan bisa bekerja sebagai mobil kontrol, percobaan dilakukan dengan mengirimkan byte pada masing – masing tombol pada mobil kontrol berbasis android menggunakan wifi kamera sebagai CCTV ini. Dengan menggunakan perintah Serial.Println(); pada software arduino yang sudah terhubung ke port COM3.
Gambar 4.36 pengujian dengan byte tombol atas
Terlihat pada gambar 4.36 nilai yang diterima adalah 76 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi atas ditekan. Saat tombol fungsi atas di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.37 pengujian dengan byte tombol bawah
Terlihat pada gambar 4.37 nilai yang diterima adalah 66 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi bawah ditekan. Saat tombol fungsi bawah di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.38 pengujian dengan byte tombol kanan
Terlihat pada gambar 4.38 nilai yang diterima adalah 82 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi kanan ditekan. Saat tombol fungsi kanan di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.39 pengujian dengan byte tombol kiri
Terlihat pada gambar 4.39 nilai yang diterima adalah 70 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi kiri ditekan. Saat tombol fungsi kiri di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.40 pengujian dengan byte tombol depannyala
Terlihat pada gambar 4.40 nilai yang diterima adalah 85 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi depannyala ditekan. Saat tombol fungsi depannyala di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.41 pengujian dengan byte tombol depanmati
Terlihat pada gambar 4.41 nilai yang diterima adalah 117 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi depanmati ditekan. Saat tombol fungsi depanmati di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.42 pengujian dengan byte tombol belakangnyala
Terlihat pada gambar 4.42 nilai yang diterima adalah 87 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi belakangnyala ditekan. Saat tombol fungsi belakangnyala di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
Gambar 4.43 pengujian dengan byte tombol belakangmati
Terlihat pada gambar 4.43 nilai yang diterima adalah 119 byte, nilai yang terlihat adalah nilai decimal yang dikirm dari handphone android pada saat tombol fungsi belakangmati ditekan. Saat tombol fungsi belakangmati di dilepas kembali maka nilai yang diterima adalah - / +1 yang menandakan tidak adanya data yang diterima.
No Tombol Simbol Data Diterima ASCII
1. Atas 77 byte L
3. Kanan 82 byte F 4. Kiri 70 byte R 5. Stop 83 byte S 6. Depannyala 85 byte U 7. Depanmati 117 byte u 8. Belakangnyala 87 byte W 9. Belakangmati 119 byte w