Kontrol fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 untuk Sistem Pendulum-Kereta
Teks penuh
Gambar
![Gambar. 1. Diagram fisik SPK [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2049587.1603261/2.612.61.277.51.302/gambar-diagram-fisik-spk.webp)
Dokumen terkait
Hasil percobaan yang telah disimulasikan kemudian diimplementasikan pada plant “Digital Pendulum Mechanical Unit 33-200” secara langsung dan hasil yang diharapkan plant
Kemudian dibuat model dan aturan fuzzy yang sesuai untuk dapat melakukan kontrol tracking pada sistem pendulum kereta dengan metode fuzzy menggunakan model following
Disisi lain, beberapa metode kontrol telah diusulkan dalam menyelesaikan permasalahan stabilisasi pada SPK. Kontroler stabilisasi model fuzzy T-S dengan performansi
Berdasarkan hasil uji simulasi identifikasi dan validasi model fuzzy Takagi-Sugeno yang dilakukan, maka dapat disimpulkan bahwa model fuzzy Takagi-Sugeno untuk sistem
Penelitian ini bertujuan untuk merancang sistem kontrol irigasi tetes berdasarkan kondisi suhu dan kelembapan tanah menggunakan kendali logika fuzzy Takagi-Sugeno
Pada implementasi metode fuzzy takagi- sugeno pada sistem kontrol ketinggian air ini menunjukkan bahwa hasil dari pengujian sesuai dengan perancangan yang telah
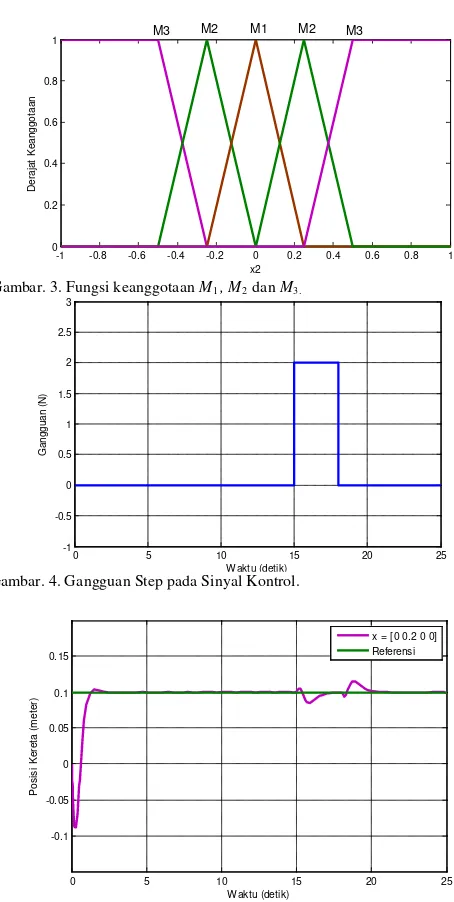
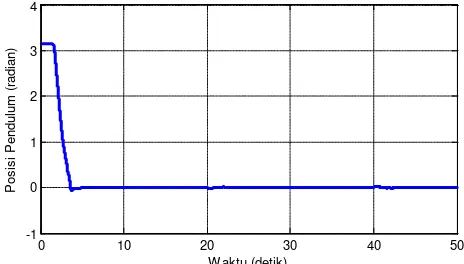
Hasil implementasi menunjukkan bahwa sistem pendulum terbalik mampu mengikuti siyal referensi yang diberikan serta performansi tracking yang diperoleh kurang dari
Kesimpulan Berdasarkan hasil uji simulasi identifikasi dan validasi model fuzzy Takagi-Sugeno yang dilakukan, maka dapat disimpulkan bahwa model fuzzy Takagi-Sugeno untuk sistem
